
Driving Robot for Reproducible Testing: A Novel Combination of Pedal and Steering Robot on a Steerable Vehicle Test Bench


Abstract
:1. Introduction
2. Related Work
2.1. Steerable Vehicle Test Benches
2.2. Pedal Robots
2.3. Driving Robots: Pedal and Steering Robots
3. System Design
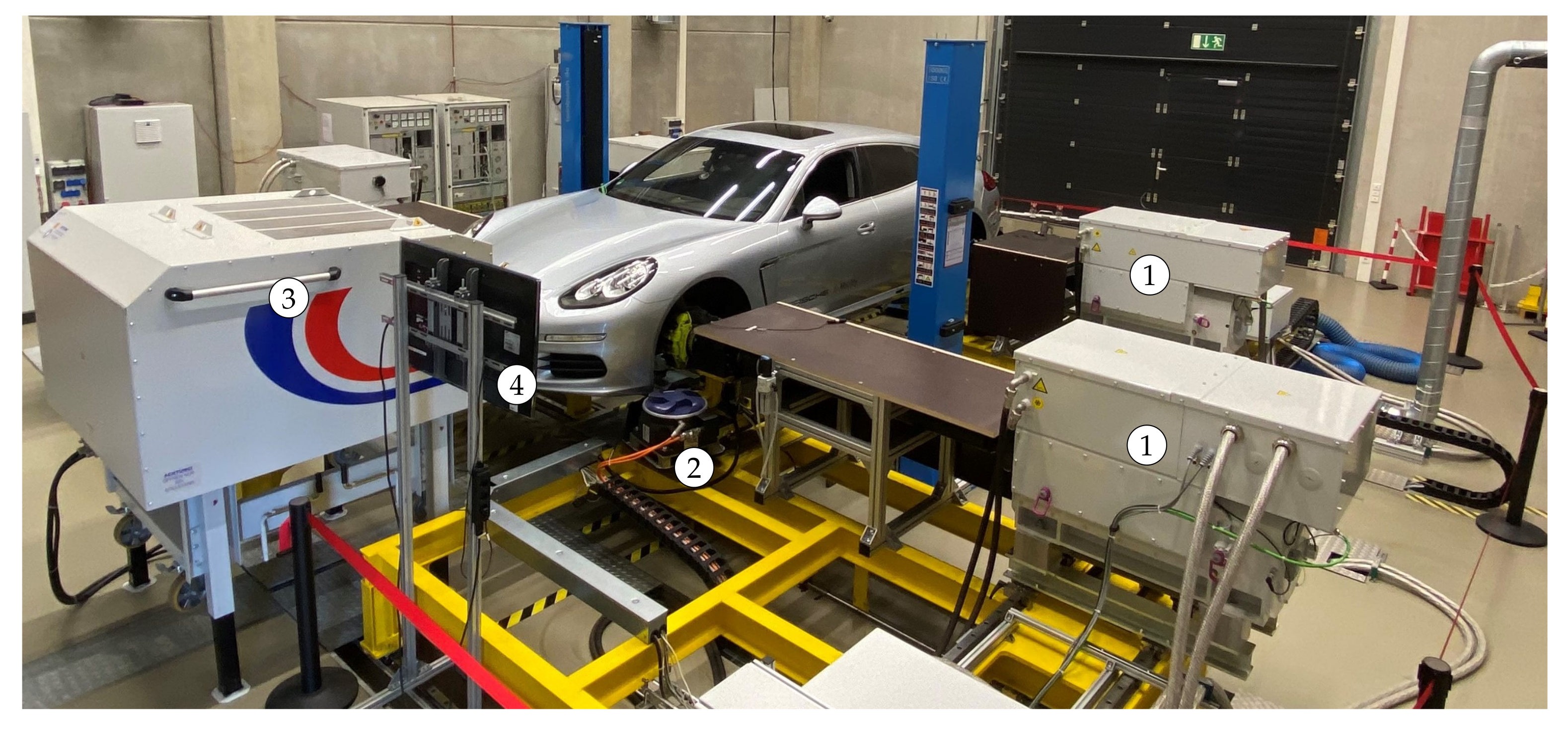
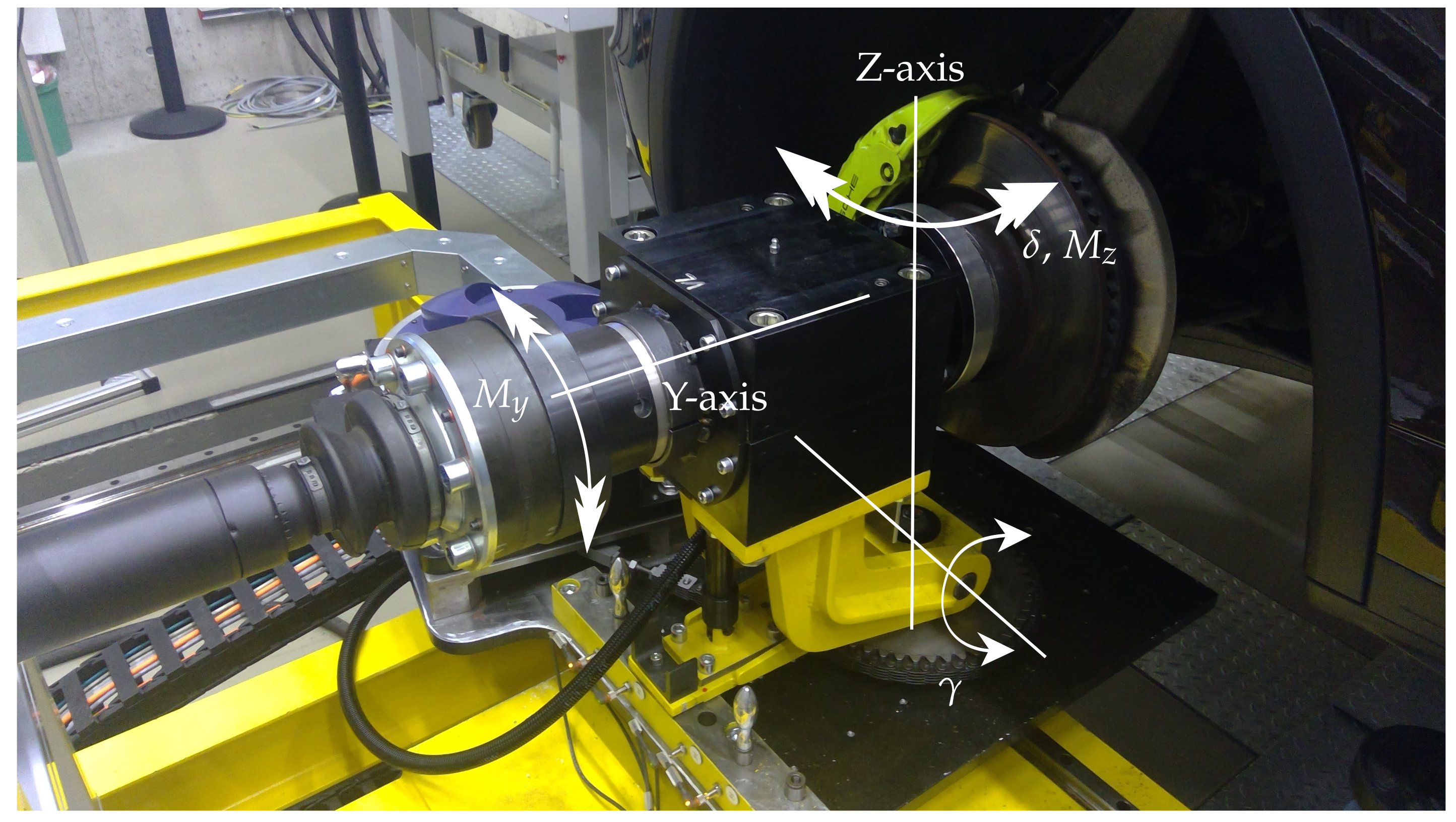
3.1. Vehicle-in-the-Loop Test Bench
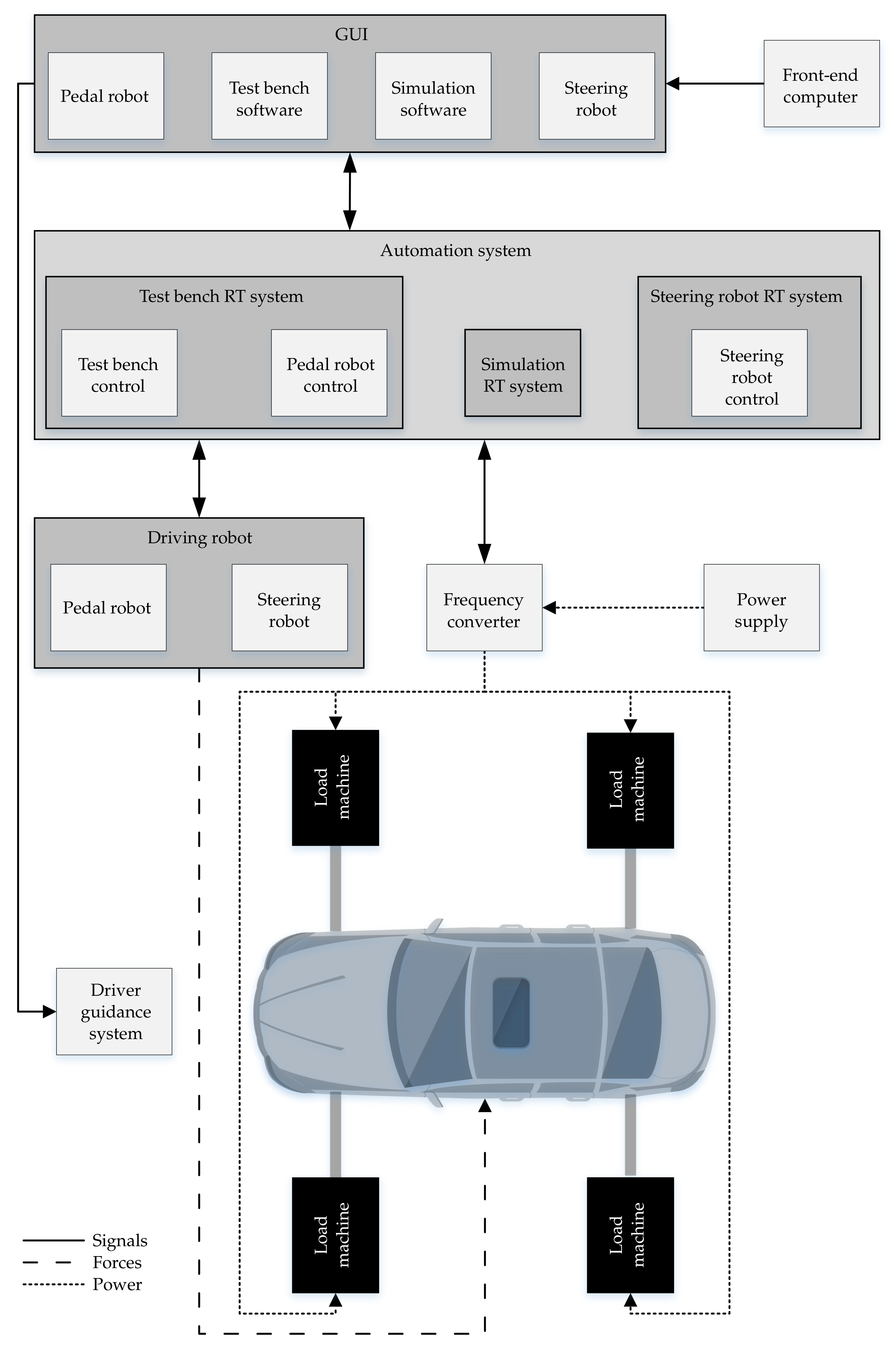
3.1.1. Hardware Setup
3.1.2. Software Setup
- Velocity control (speed control)
- Driving resistance control (torque control)
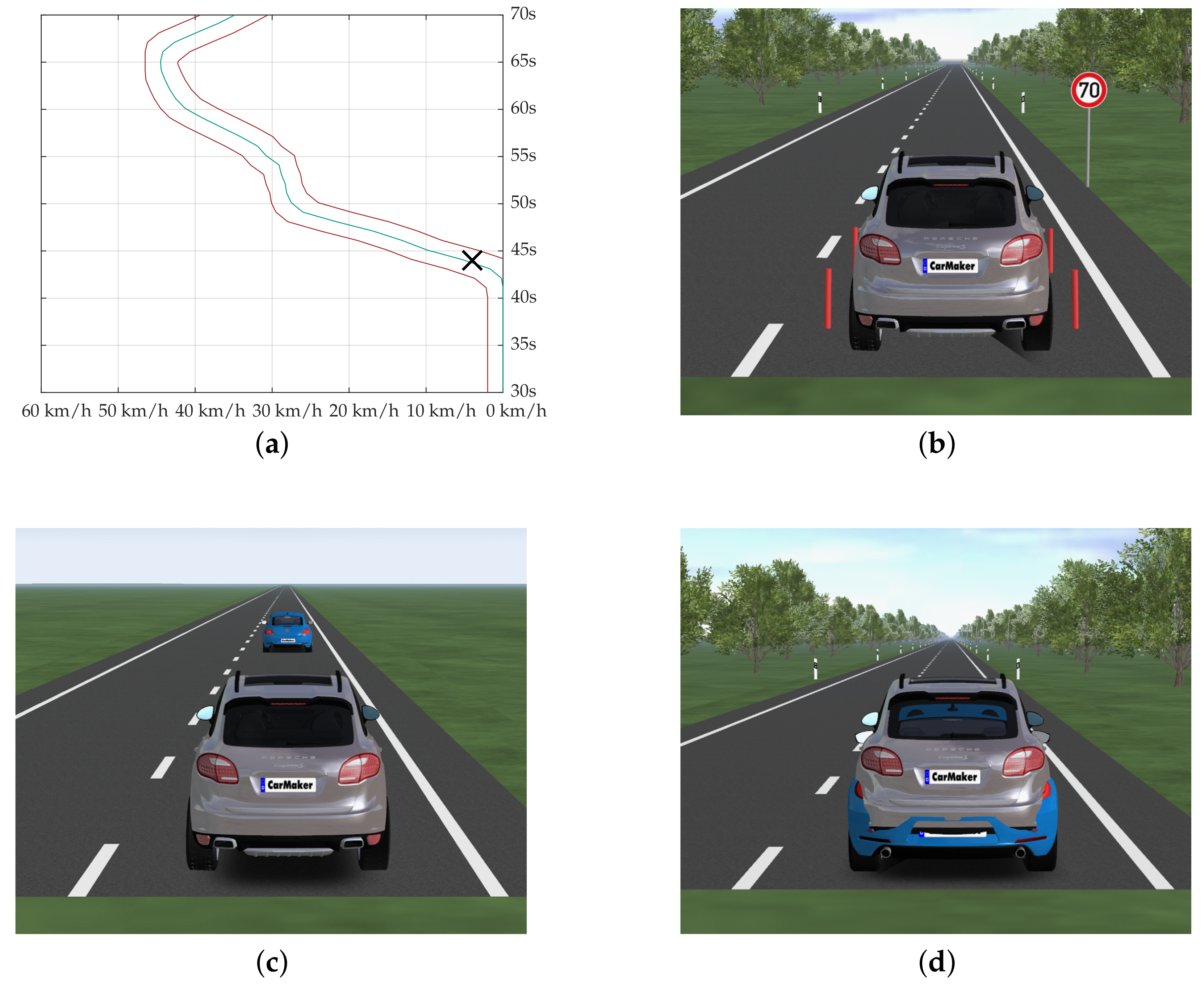
- Virtual real driving simulation with CarMaker (speed control)
3.2. Driving Robot: Combination of a Pedal and Steering Robot
3.2.1. Hardware Setup
3.2.2. Software Setup
- Steering wheel angle control
- Virtual real driving simulation with CarMaker
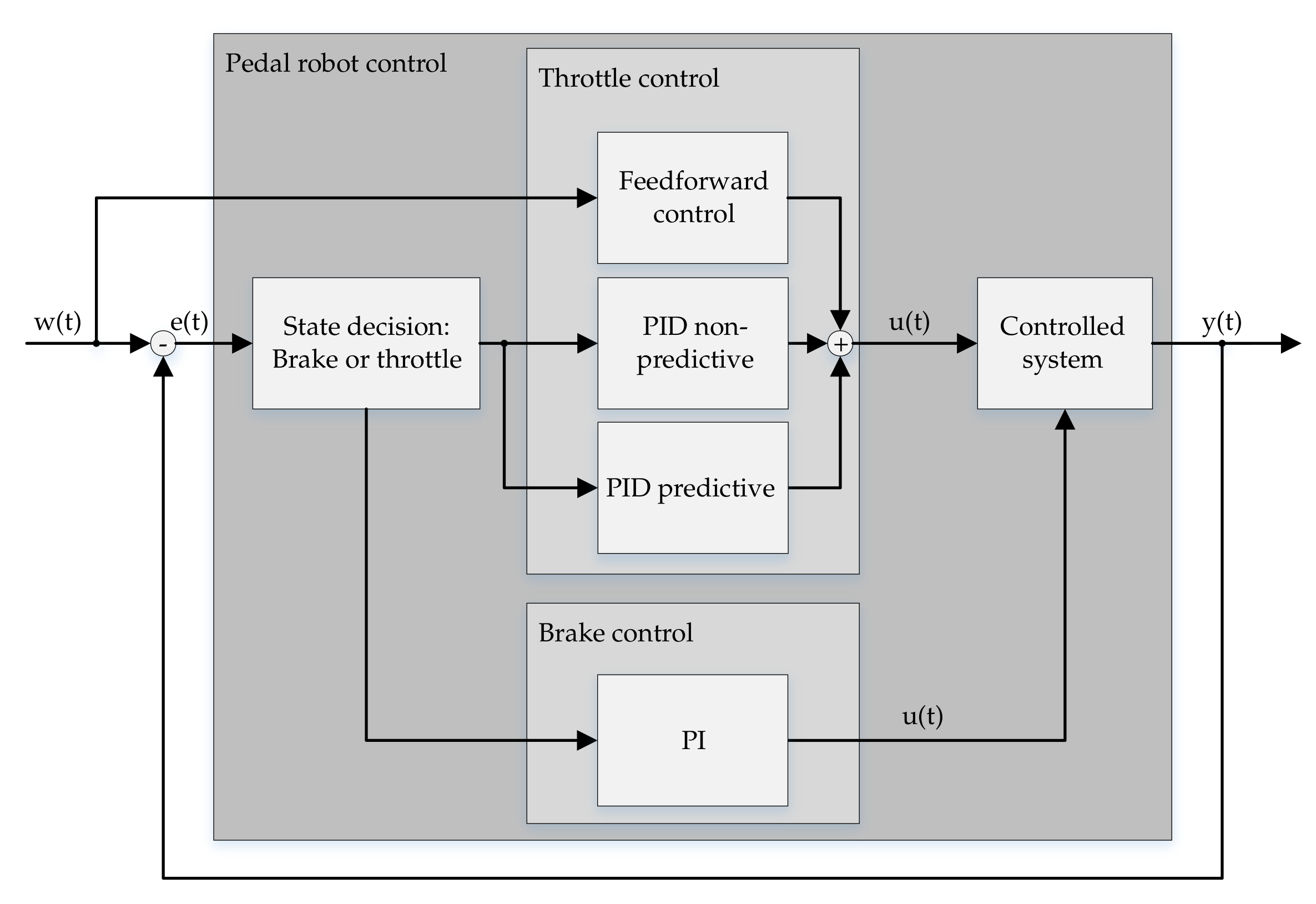
- Pedal control
- Velocity control
- Driving cycle control
- Virtual real driving simulation with CarMaker
4. Performed Test Cases
4.1. Test Case Definition
- WLTC Class 3b (pedal robot)
- Steering circles (pedal and steering robot)
- Real driving cycles (pedal and steering robot)
4.2. Test Results
4.2.1. WLTC
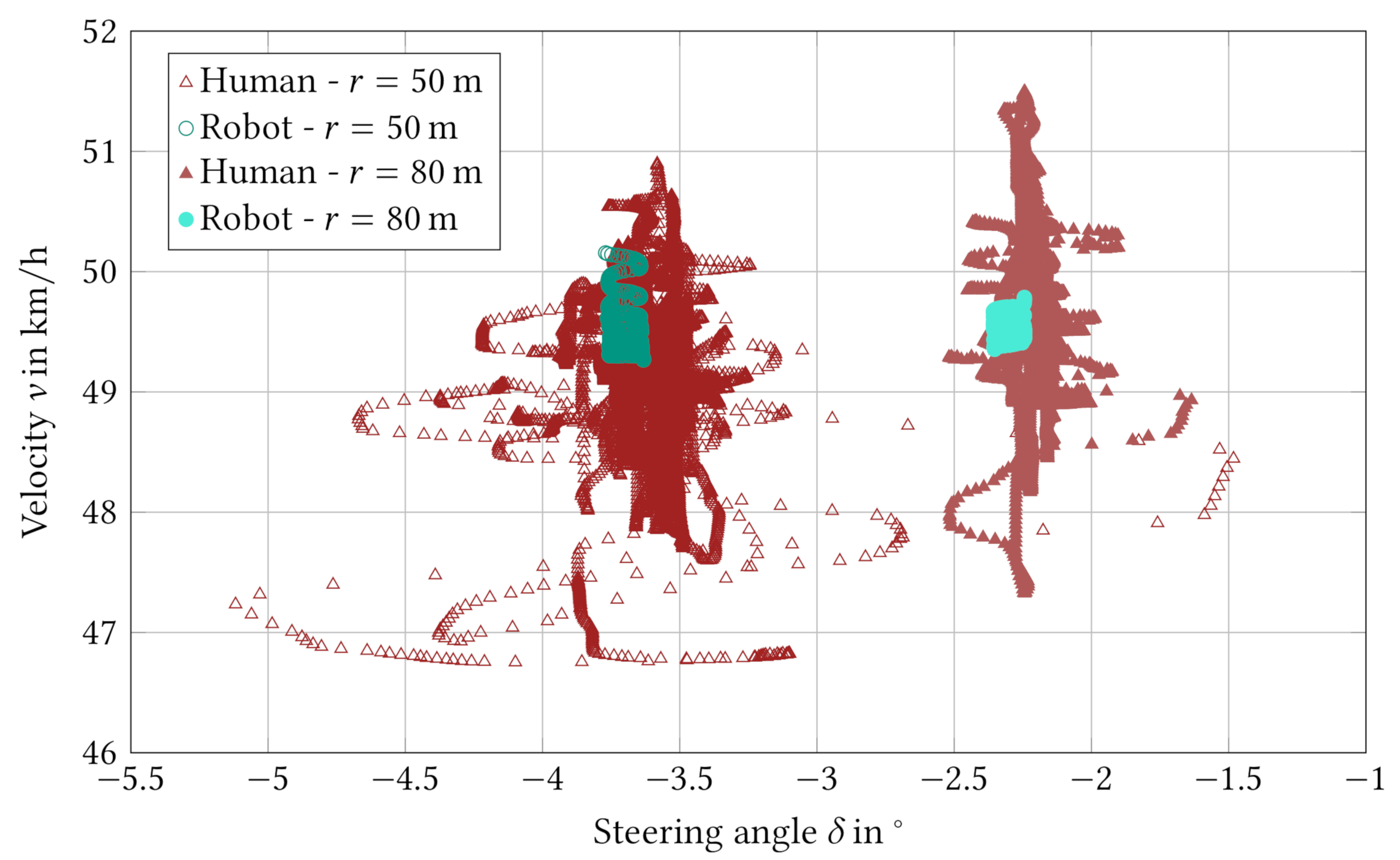
4.2.2. Steering Circle
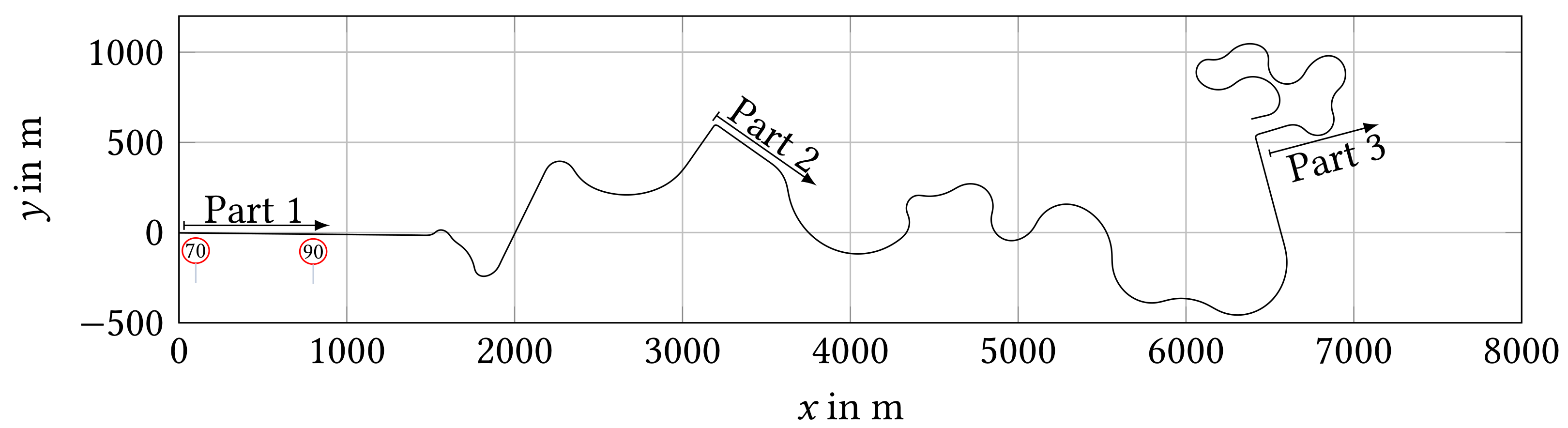
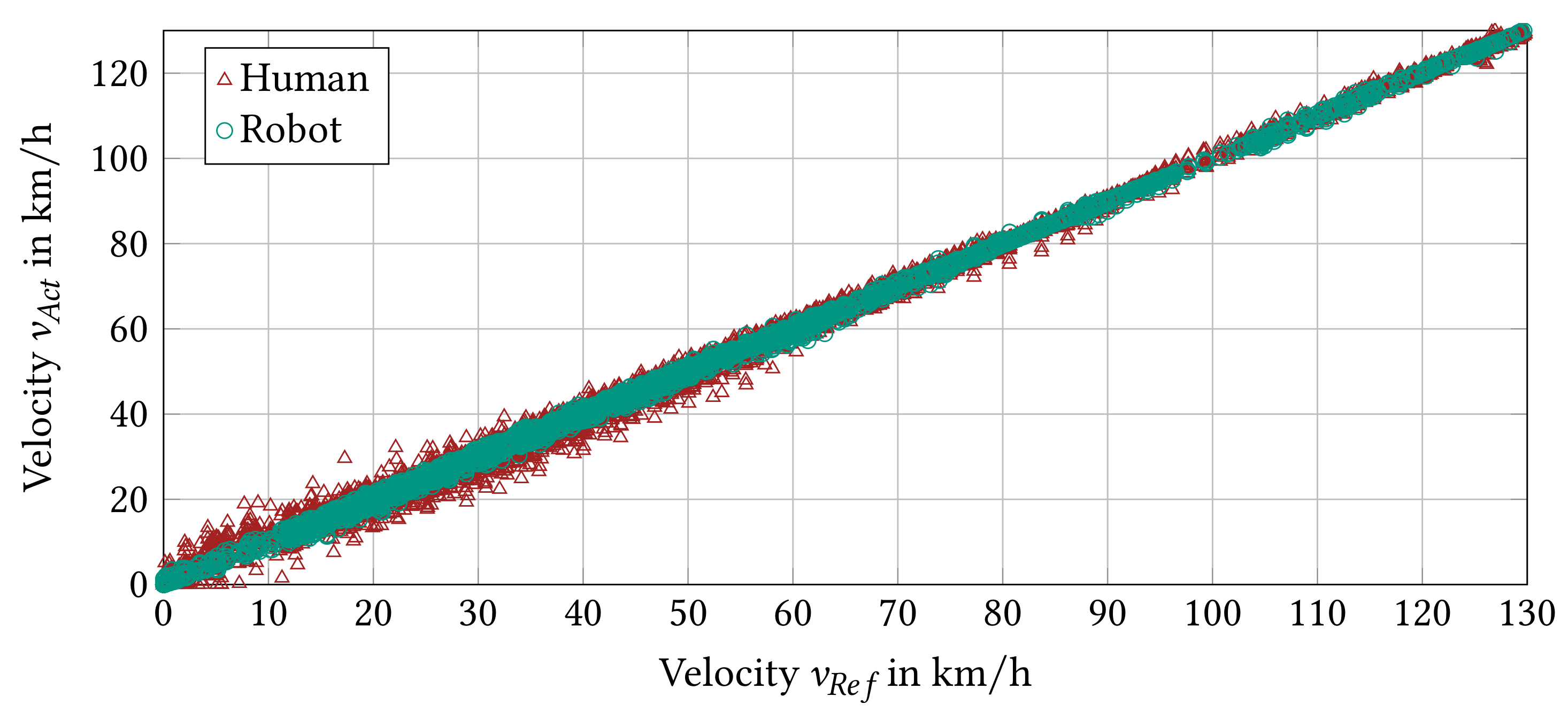
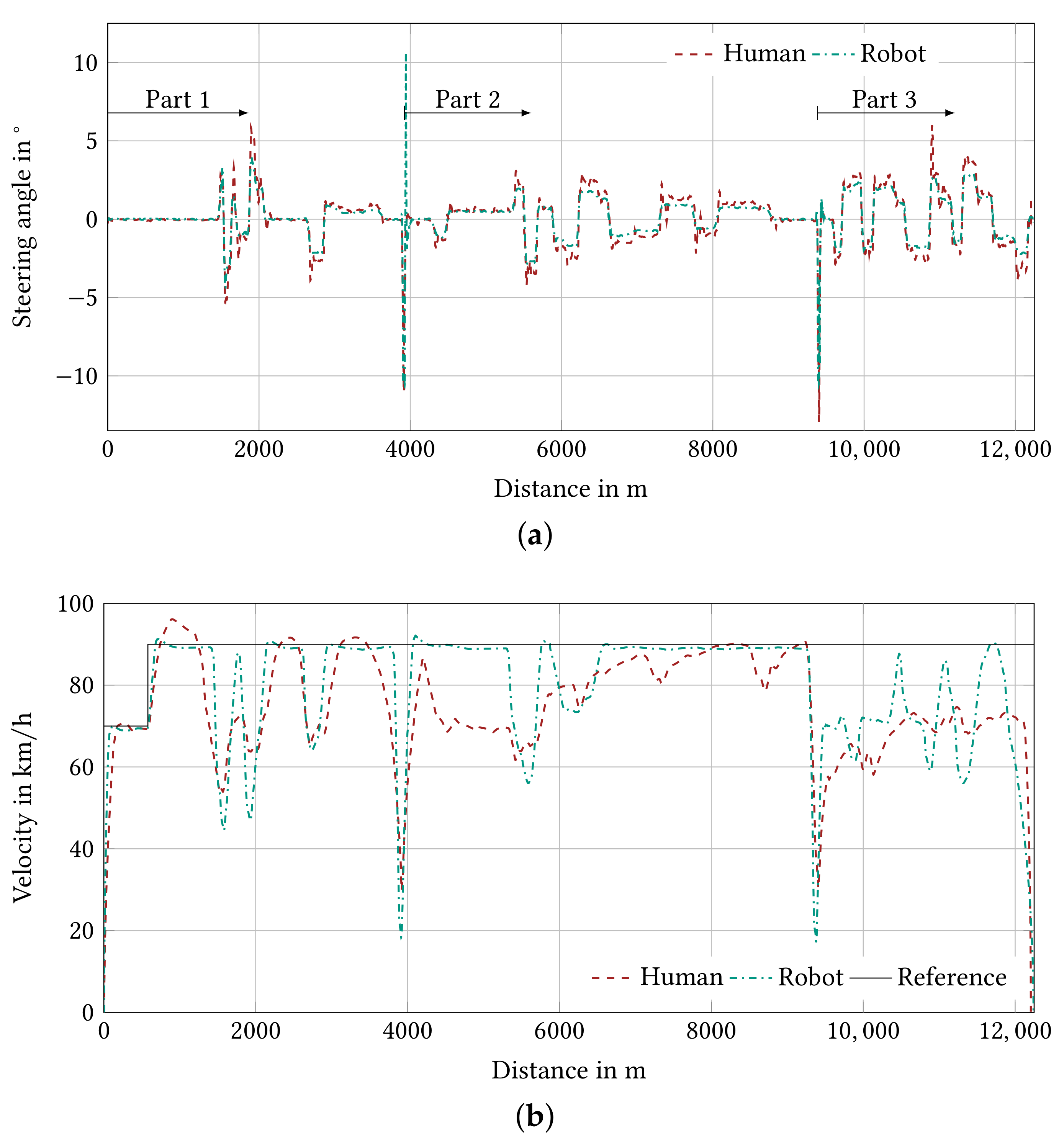
4.2.3. Real Driving Route
4.3. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Acknowledgments
Conflicts of Interest
References
- Thiel, W.; Gröf, S.; Hohenberg, G.; Lenzen, B. Investigations on Robot Drivers for Vehicle Exhaust Emission Measurements in Comparison to the Driving Strategies of Human Drivers. In Proceedings of the International Fall Fuels and Lubricants Meeting and Exposition, San Francisco, CA, USA, 19 October 1998; SAE International: Warrendale, PA, USA, 1998. [Google Scholar] [CrossRef]
- Hwang, K.; Park, J.; Kim, H.; Kuc, T.Y.; Lim, S. Development of a Simple Robotic Driver System (SimRoDS) to Test Fuel Economy of Hybrid Electric and Plug-In Hybrid Electric Vehicles Using Fuzzy-PI Control. Electronics 2021, 10, 1444. [Google Scholar] [CrossRef]
- Gießler, M.; Rautenberg, P.; Gauterin, F. Consumption-relevant load simulation during cornering at the vehicle test bench VEL. In Proceedings of the 20th Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2020; pp. 159–172. [Google Scholar] [CrossRef]
- Paulweber, M.; Lebert, K. Mess- und Prüfstandstechnik; Springer: Wiesbaden, Germany, 2014. [Google Scholar] [CrossRef]
- Gietelink, O.; Ploeg, J.; De Schutter, B.; Verhaegen, M. Development of advanced driver assistance systems with vehicle hardware-in-the-loop simulations. Veh. Syst. Dyn. 2006, 44, 569–590. [Google Scholar] [CrossRef]
- Bock, T.; Maurer, M.; Farber, G. Validation of the Vehicle in the Loop (VIL); A milestone for the simulation of driver assistance systems. In Proceedings of the IEEE Intelligent Vehicles Symposium, Istanbul, Turkey, 13–15 June 2007; pp. 612–617. [Google Scholar] [CrossRef]
- Solmaz, S.; Holzinger, F. A Novel Testbench for Development, Calibration and Functional Testing of ADAS/AD Functions. In Proceedings of the 2019 IEEE International Conference on Connected Vehicles and Expo (ICCVE), Graz, Austria, 4–8 November 2019; pp. 1–8. [Google Scholar] [CrossRef]
- Wang, W.; Zhao, X.; Zhen, W.; Shi, X.; Xu, Z. Research on Steering-Following System of Intelligent Vehicle-in-the-Loop Testbed. IEEE Access 2020, 8, 31684–31692. [Google Scholar] [CrossRef]
- Schyr, C.; Brissard, A. Driving Cube—A novel concept for validation of powertrain and steering systems with automated driving. In Proceedings of the 13th International Symposium on Advanced Vehicle Control (AVEC’ 16), Munich, Germany, 13–16 September 2016; CRC Press: Boca Raton, FL, USA, 2016; pp. 79–84. [Google Scholar] [CrossRef]
- Moriyama, A.; Murase, I.; Shimozono, A.; Takeuchi, T. A Robotic Driver on Roller Dynamometer with Vehicle Performance Self Learning Algorithm. SAE Trans. 1991, 100, 42–54. [Google Scholar]
- Muller, K.; Leonhard, W. Computer control of a robotic driver for emission tests. In Proceedings of the 1992 International Conference on Industrial Electronics, Control, Instrumentation, and Automation, San Diego, CA, USA, 9–13 November 1992; Volume 3, pp. 1506–1511. [Google Scholar] [CrossRef]
- Kraft, C.; Staffen, M. Fahrroboter Ohne Anlernphase für den Rollenprüfstand. In ATZextra; Springer: Wiesbaden, Germany, 2011; Volume 16, pp. 42–46. [Google Scholar] [CrossRef]
- Sailer, S.; Buchholz, M.; Dietmayer, K. Adaptive model-based velocity control by a robotic driver for vehicles on roller dynamometers. In Proceedings of the 2013 American Control Conference, Washington, DC, USA, 17–19 June 2013; pp. 1356–1361. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, W. Digital prototyping design of electromagnetic unmanned robot applied to automotive test. Robot. Comput.-Integr. Manuf. 2015, 32, 54–64. [Google Scholar] [CrossRef]
- Wang, H.; Chen, G.; Zhang, W. A method for vehicle speed tracking by controlling driving robot. Trans. Inst. Meas. Control 2020, 42, 1521–1536. [Google Scholar] [CrossRef]
- Chen, G.; Zhang, W. Control System Design for Electromagnetic Driving Robot Used for Vehicle Test. In Proceedings of the 2019 IEEE International Conference on Mechatronics and Automation (ICMA), Tianjin, China, 4–7 August 2019; pp. 811–815. [Google Scholar] [CrossRef]
- Sailer, S.; Buchholz, M.; Dietmayer, K. Flatness based velocity tracking control of a vehicle on a roller dynamometer using a robotic driver. In Proceedings of the 2011 50th IEEE Conference on Decision and Control and European Control Conference, Orlando, FL, USA, 12–15 December 2011; pp. 7962–7967. [Google Scholar] [CrossRef] [Green Version]
- Sailer, S.; Buchholz, M.; Dietmayer, K. Driveaway and braking control of vehicles with manual transmission using a robotic driver. In Proceedings of the 2013 IEEE International Conference on Control Applications (CCA), Hyderabad, India, 28–30 August 2013; pp. 235–240. [Google Scholar] [CrossRef]
- Sailer, S. Regelung eines Fahrroboters für Rollenprüfstandsversuche. Ph.D. Thesis, Universität Ulm, Baden-Württemberg, Germany, 2017. [Google Scholar] [CrossRef]
- Namik, H.; Inamura, T.; Stol, K. Development of a robotic driver for vehicle dynamometer testing. In Proceedings of the 2006 Australasian Conference on Robotics and Automation, ACRA 2006, Auckland, New Zealand, 6–8 December 2006. [Google Scholar]
- Stiller, C.; Simon, A.; Weisser, H. A Driving Robot For Autonomous Vehicles On Extreme Courses. IFAC Proc. 2001, 34, 267–273. [Google Scholar] [CrossRef]
- Wang, Z.; Zhang, Q.; Jia, T.; Zhang, S. Research on control algorithm of a automatic driving robot based on improved model predictive control. J. Phys. Conf. Ser. 2021, 1920, 012116. [Google Scholar] [CrossRef]
- Wong, N.; Chambers, C.; Stol, K.; Halkyard, R. Autonomous Vehicle Following Using a Robotic Driver. In Proceedings of the 2008 15th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 2–4 December 2008; pp. 115–120. [Google Scholar] [CrossRef]
- Song, Z.; Cao, L.; Chou, C.C. Development of Test Equipment for Pedestrian-Automatic Emergency Braking Based on C-NCAP (2018). Sensors 2020, 20, 6206. [Google Scholar] [CrossRef] [PubMed]
- Regulation (EU) 2018/1832. Commission Regulation (EU) 2018/1832 of 5 November 2018 amending Directive 2007/46/EC of the European Parliament and of the Council, Commission Regulation (EC) No 692/2008 and Commission Regulation (EU) 2017/1151 for the purpose of improving the emission type approval tests and procedures for light passenger and commercial vehicles, including those for in-service conformity and real-driving emissions and introducing devices for monitoring the consumption of fuel and electric energy (Text with EEA relevance). Off. J. Eur. Union 2018, 61, L 301. [Google Scholar]
- Performance, L.D.V.; Economy Measure Committee. Drive Quality Evaluation for Chassis Dynamometer Testing. 2014. Available online: https://www.sae.org/standards/content/j2951_201401 (accessed on 10 May 2022). [CrossRef]
- Han, C.; Seiffer, A.; Orf, S.; Hantschel, F.; Li, S. Validating Reliability of Automated Driving Functions on a Steerable VEhicle-in-the-Loop (VEL) Test Bench. In Proceedings of the 21st Internationales Stuttgarter Symposium; Bargende, M., Reuss, H.C., Wagner, A., Eds.; Springer Fachmedien Wiesbaden: Wiesbaden, Germany, 2021; pp. 546–559. [Google Scholar] [CrossRef]
- Diewald, A.; Kurz, C.; Kannan, P.V.; Gießler, M.; Pauli, M.; Göttel, B.; Kayser, T.; Gauterin, F.; Zwick, T. Radar Target Simulation for Vehicle-in-the-Loop Testing. Vehicles 2021, 3, 257–271. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| -Diagram | Traffic Signs | Vehicle Ahead | Ghost Vehicle | |
|---|---|---|---|---|
| Velocity | x | x | x | x |
| Acceleration | x | x | x | |
| Trajectory | x | x | ||
| Predictive driving | x | x |
| [1] | [2] | [10] | [11] | [13,17,18,19] | [14] | [15] | [16] | [20] | ||
|---|---|---|---|---|---|---|---|---|---|---|
| Input parameters | Velocity | x | x | x | x | x | x | x | x | x |
| Engine speed | x | x | x | x | x | x | ||||
| Parameterization | Pre-learning cycles | x | x | x | ||||||
| Technical data parameterization | x | x | ||||||||
| Learning while main cycle | x | x | x | x | x | x | ||||
| Not specified | x | x | ||||||||
| Controller type | H-infinity | x | ||||||||
| PI | x | x | x | |||||||
| PID | x | |||||||||
| Fuzzy | x | x | ||||||||
| Vehicle model | x | x | ||||||||
| Not specified | x | x | x |
| Description | Data |
|---|---|
| Nominal wheel load power | |
| Max. wheel load torque at nom. speed () | |
| Max. wheel speed | ( with ) |
| Max. self-aligning torque at the front wheels | |
| Max. steering angle at the front wheels | |
| Max. air fan wind speed | |
| Max. vehicle weight | |
| Max. wheel load | |
| Wheelbase | – |
| Track width | – |
| Description | Symbol | Unit |
|---|---|---|
| Drag coefficient | - | |
| Projected frontal area | A | |
| Air density | ||
| Vehicle mass | m | |
| Gravitational acceleration | g | |
| Rolling resistance coefficient | - | |
| Mass factor | - |
| Test Case | Curve Radius | Vehicle Velocity |
|---|---|---|
| Steering circle | ||
| Steering circle | ||
| Real driving | r |
| Driver | RMSSE in km/h | IWR in % |
|---|---|---|
| Human | 1.86 | 4.38 |
| Human | 1.75 | 3.73 |
| Human | 1.25 | 6.25 |
| Human | 1.35 | 2.85 |
| Human | 1.14 | 2.70 |
| Human | 1.46 | 6.13 |
| Robot | 0.83 | 5.78 |
| Robot | 0.89 | 7.08 |
| Driver | ( m) | ( m) |
|---|---|---|
| Human | ||
| Robot |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rautenberg, P.; Kurz, C.; Gießler, M.; Gauterin, F. Driving Robot for Reproducible Testing: A Novel Combination of Pedal and Steering Robot on a Steerable Vehicle Test Bench. Vehicles 2022, 4, 727-743. https://doi.org/10.3390/vehicles4030041
Rautenberg P, Kurz C, Gießler M, Gauterin F. Driving Robot for Reproducible Testing: A Novel Combination of Pedal and Steering Robot on a Steerable Vehicle Test Bench. Vehicles. 2022; 4(3):727-743. https://doi.org/10.3390/vehicles4030041
Chicago/Turabian StyleRautenberg, Philip, Clemens Kurz, Martin Gießler, and Frank Gauterin. 2022. "Driving Robot for Reproducible Testing: A Novel Combination of Pedal and Steering Robot on a Steerable Vehicle Test Bench" Vehicles 4, no. 3: 727-743. https://doi.org/10.3390/vehicles4030041