
Determination of Speed-Dependent Roadway Luminance for an Adequate Feeling of Safety at Nighttime Driving




Abstract
:1. Introduction
2. Materials and Methods
2.1. Study Design
2.1.1. Static Test Condition
2.1.2. Dynamic Test Condition
2.2. Statistical Methods and Data Analysis
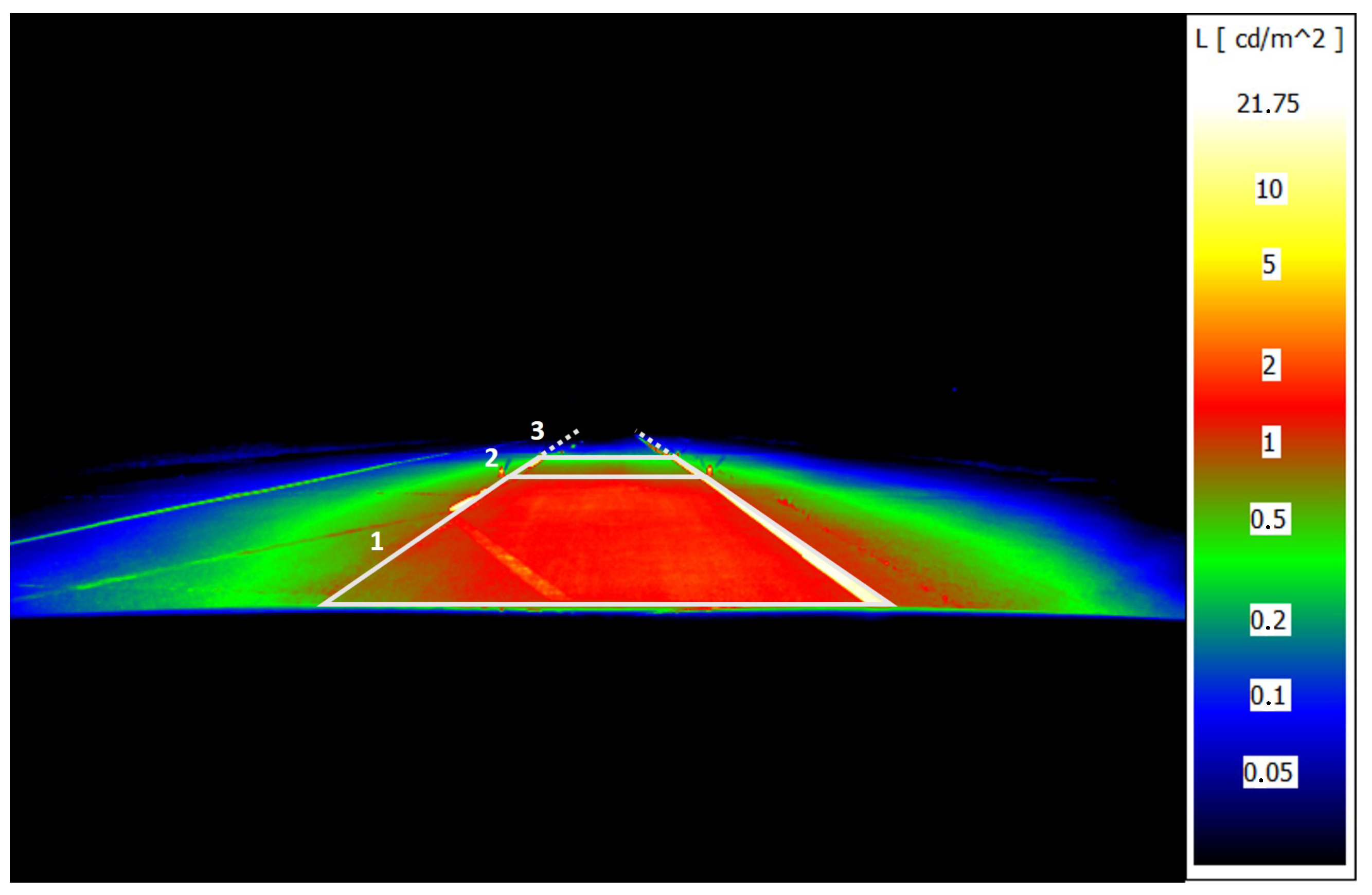
2.2.1. HDR Luminance Images
2.2.2. Brightness Ratings
3. Results and Discussion
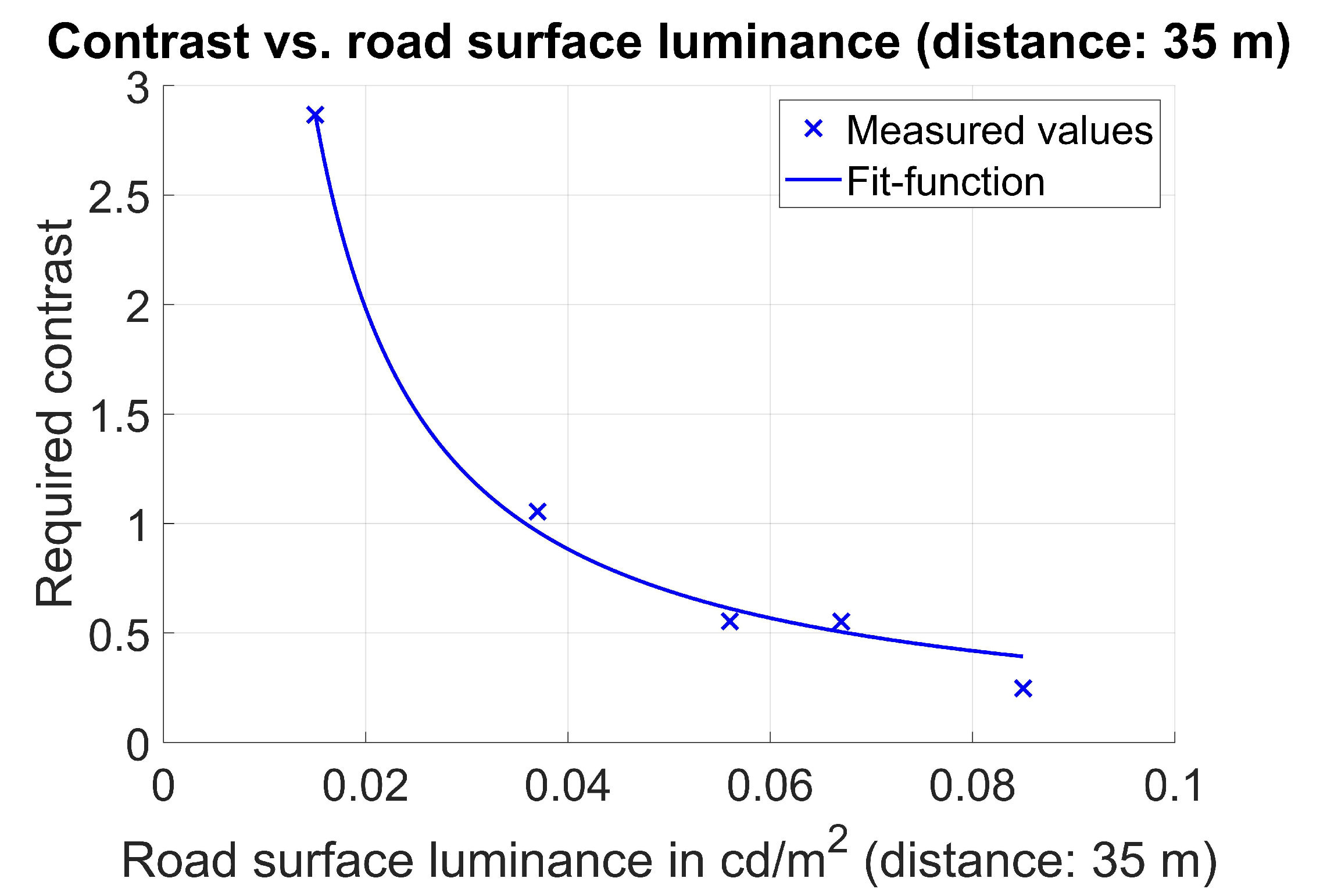
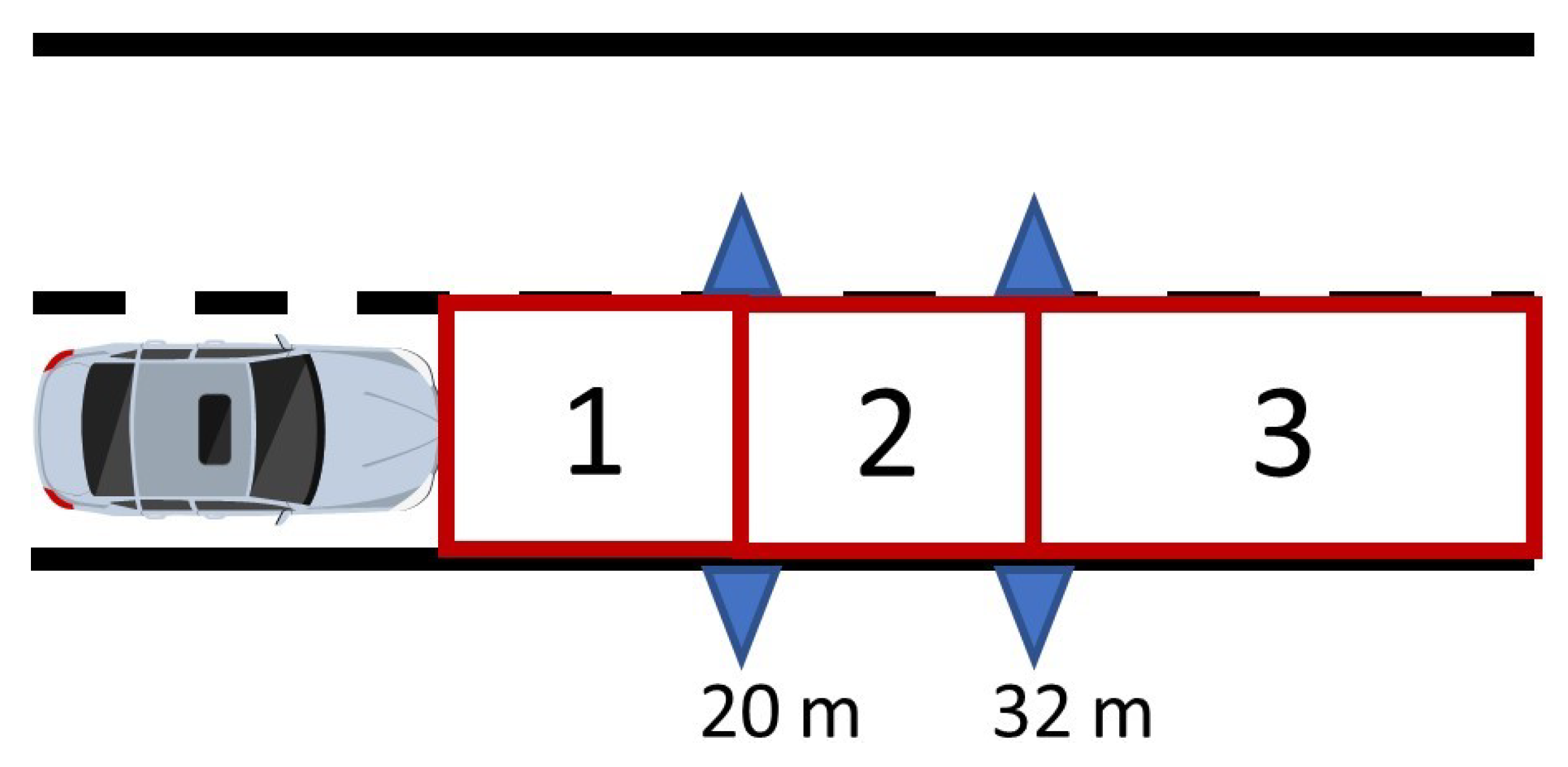
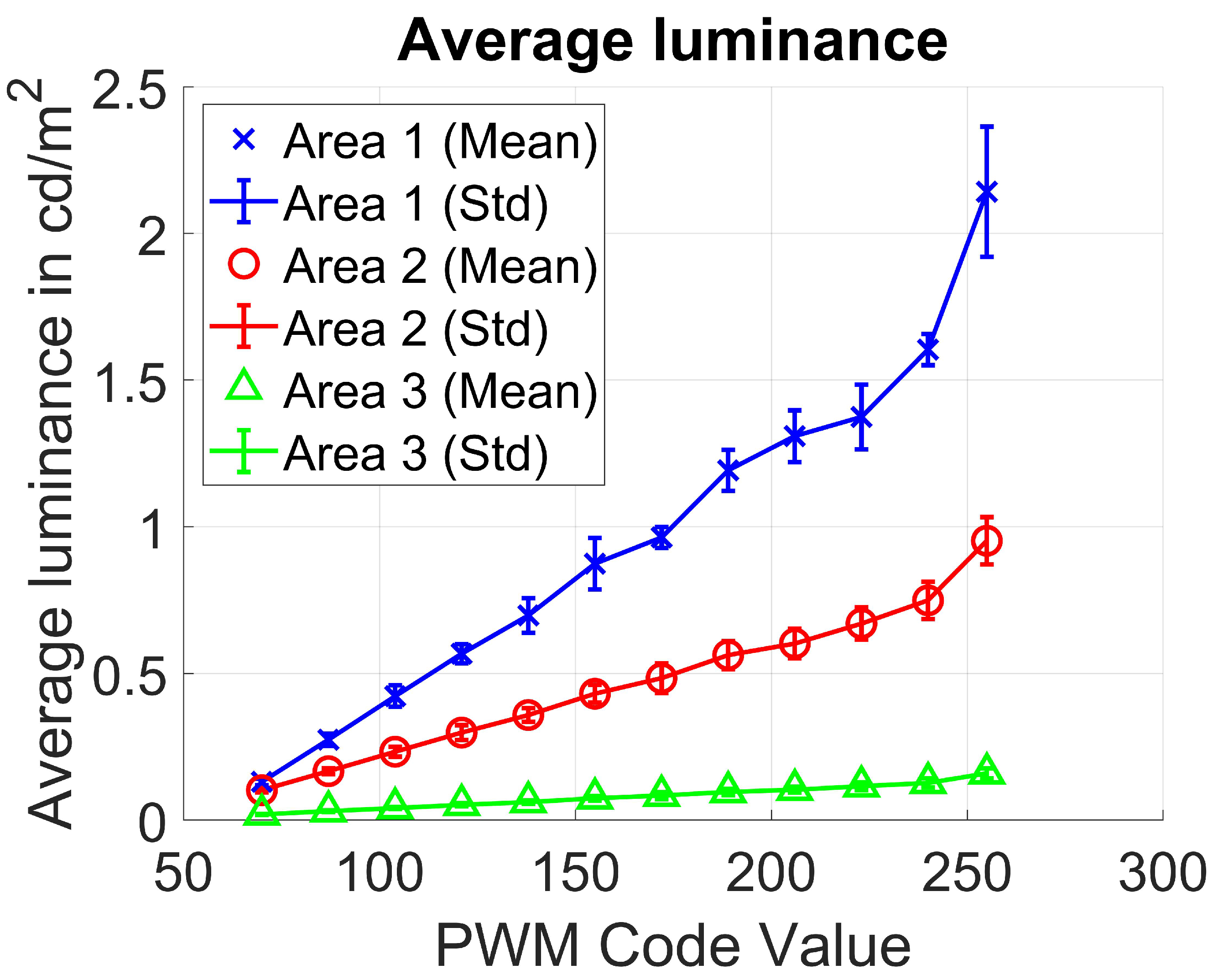
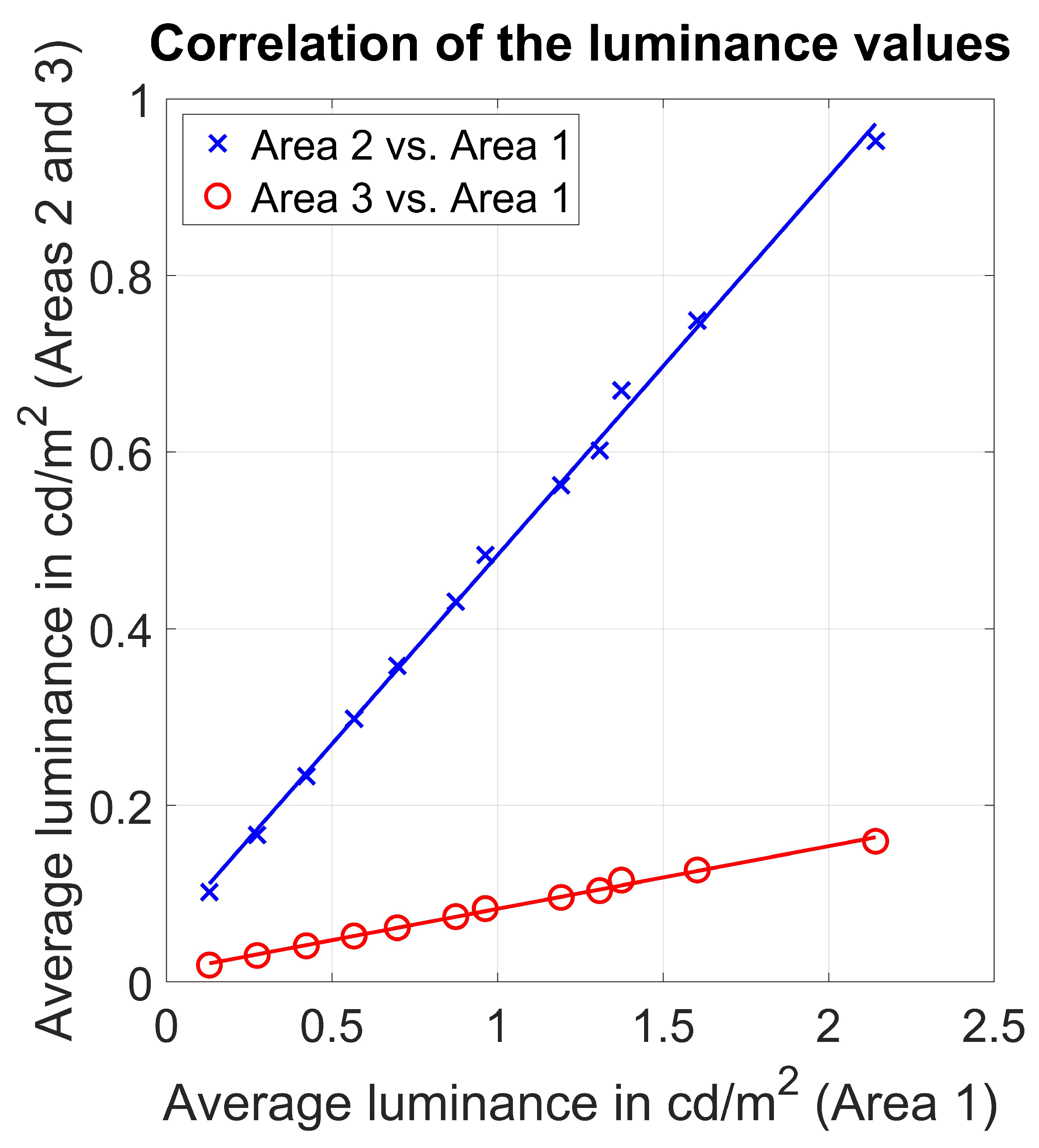
3.1. Forefield Luminance and Its Correlation between Different Evaluation Areas
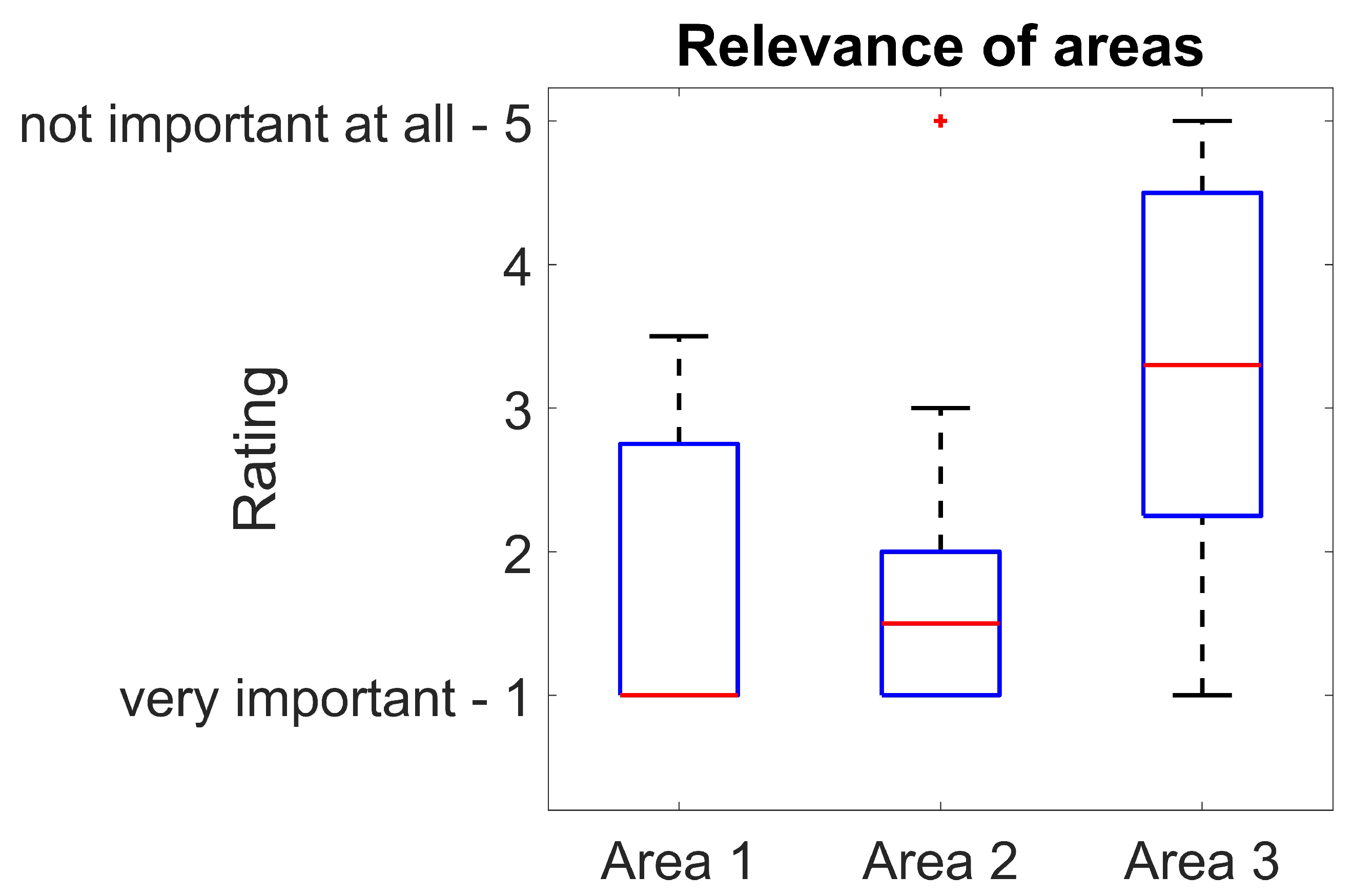
3.2. Relevance of the Different Forefield Areas for Brightness Evaluation
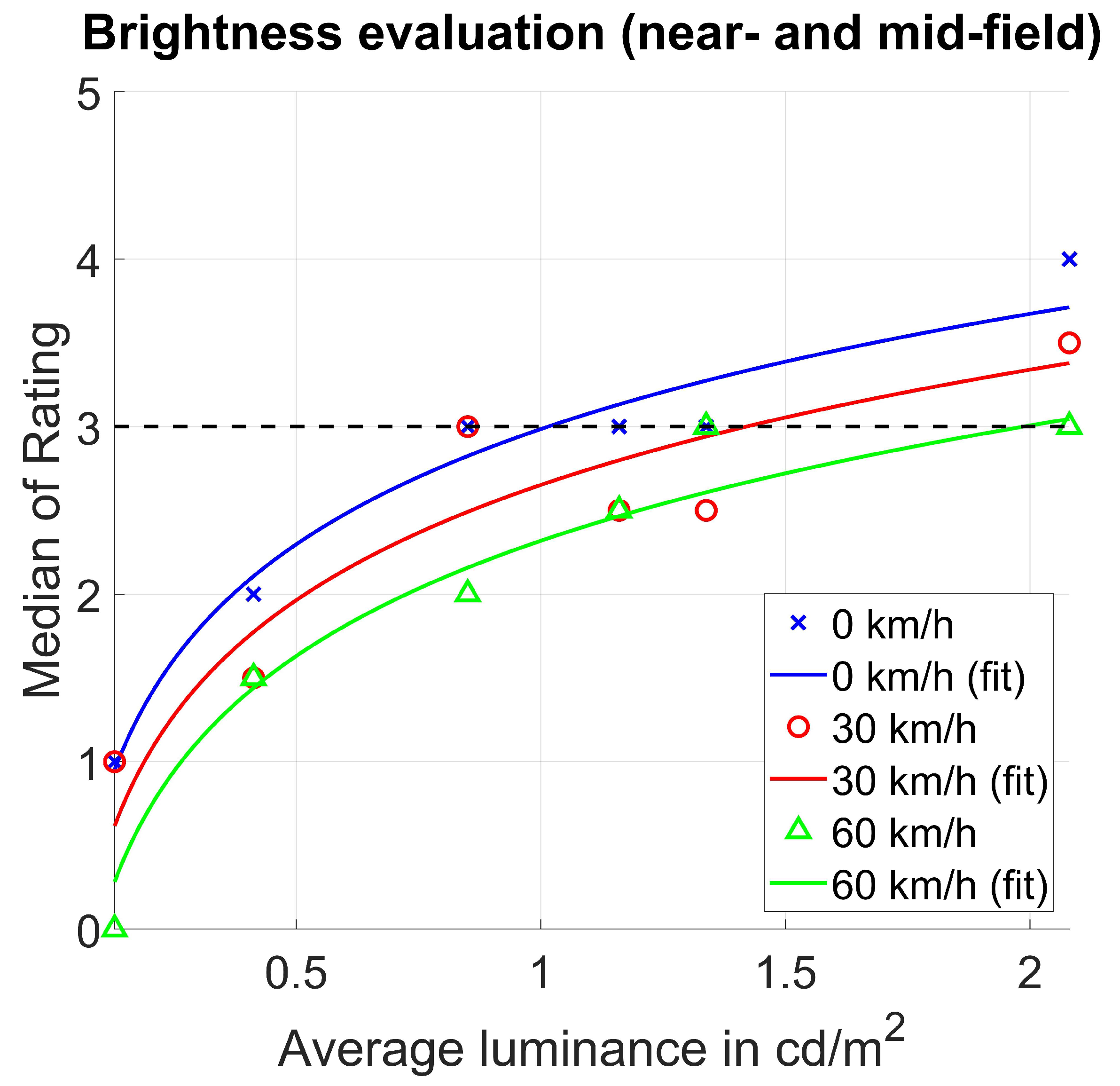
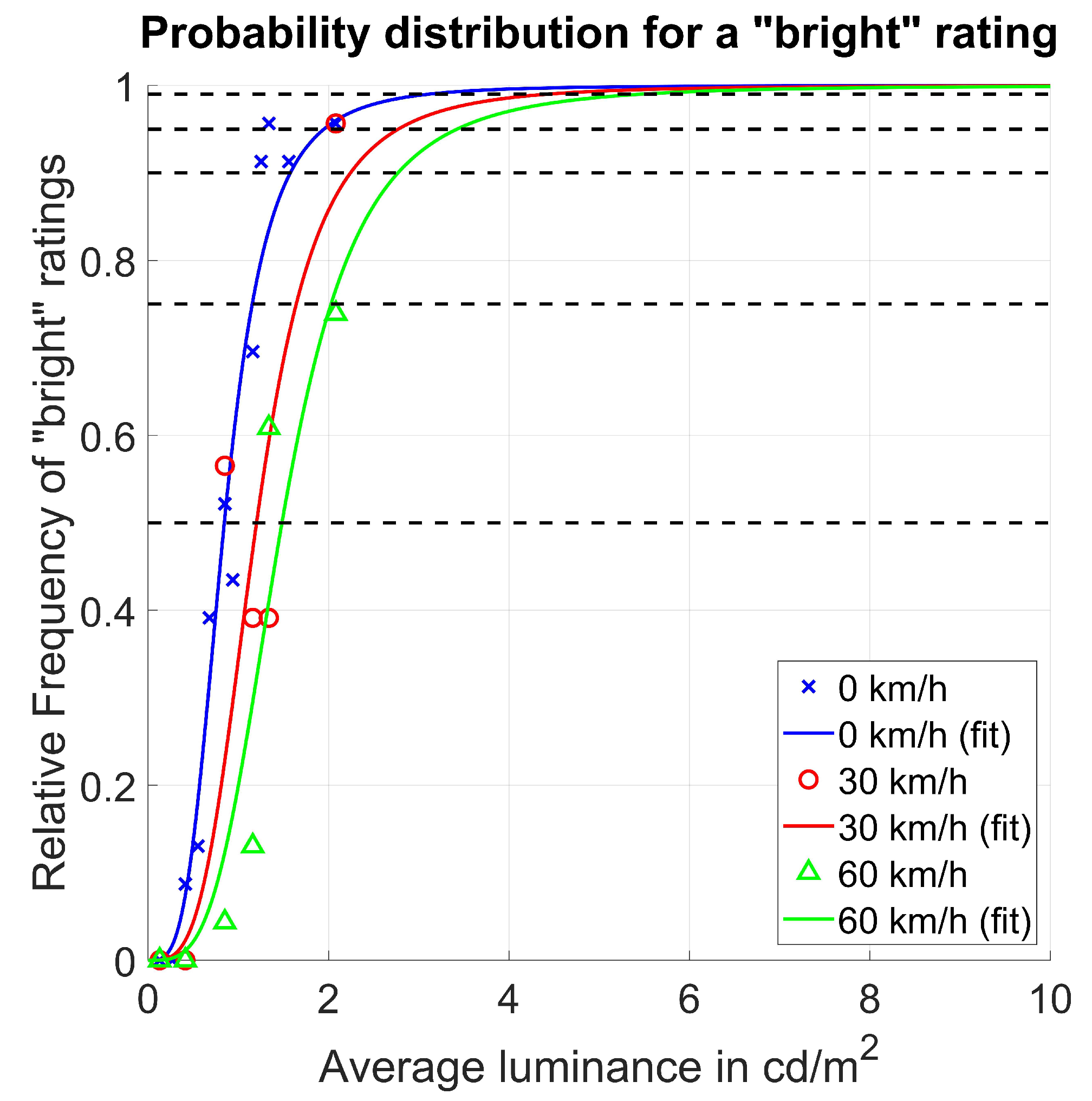
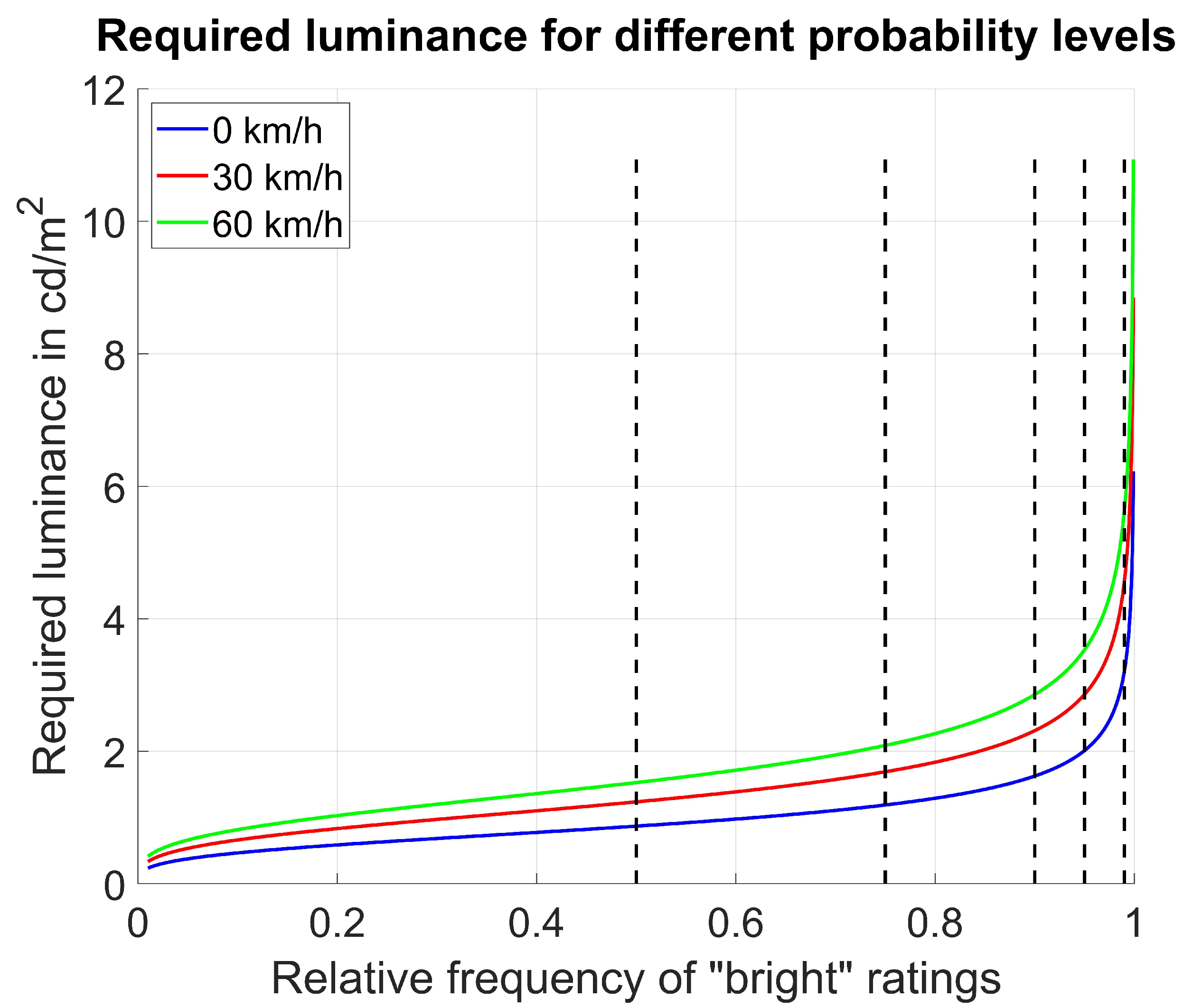
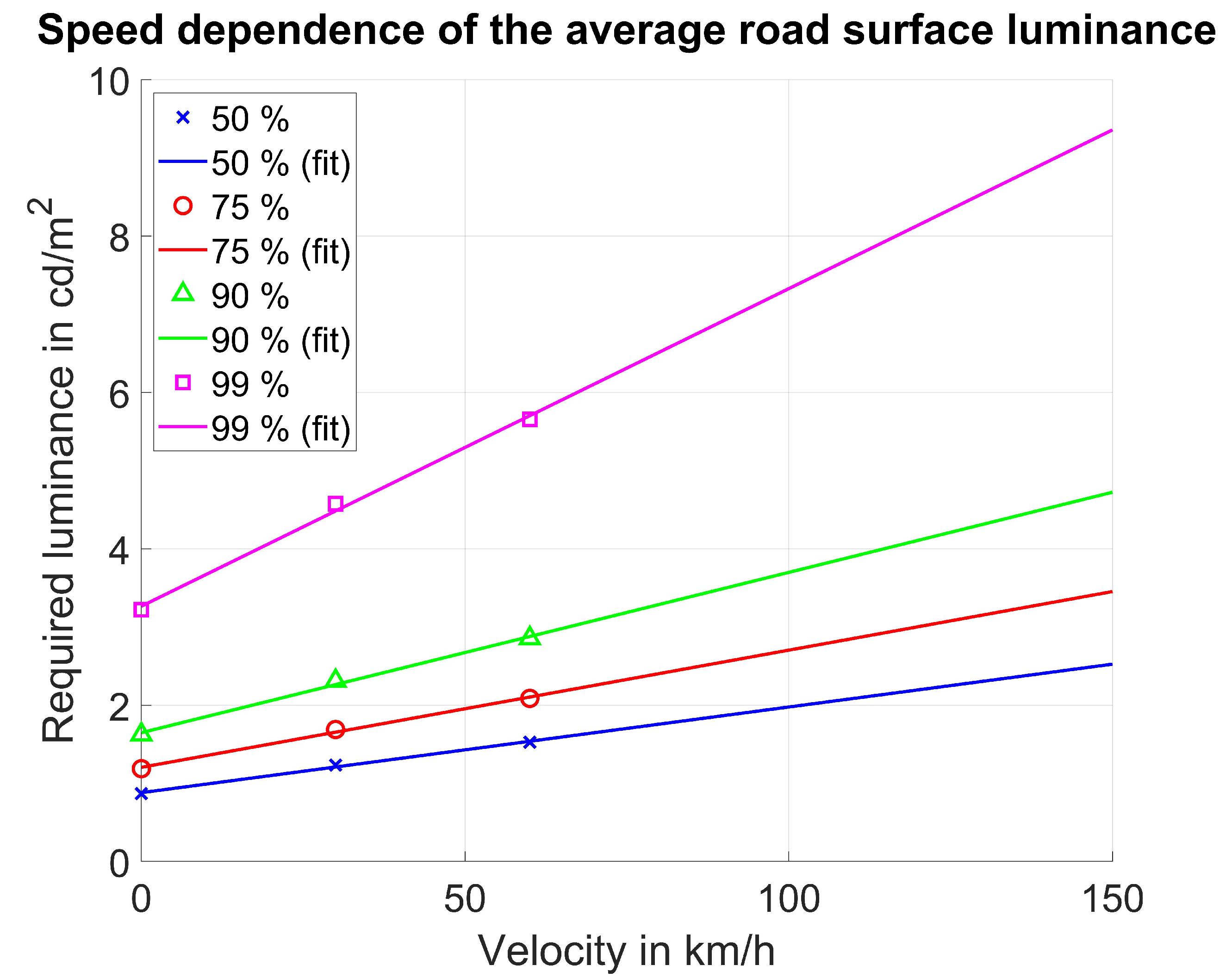
3.3. Speed-Dependent Brightness Evaluation of the Vehicle Forefield
3.4. Implications for Urban Areas
4. Conclusions and Outlook
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Sivak, M. The information that drivers use: Is it Indeed 90 % visual? Perception 1996, 25, 1081–1089. [Google Scholar] [CrossRef]
- Charman, W.N. Vision and driving—A literature review and commentary. Ophthalmic Physiol. Opt. 1997, 17, 371–391. [Google Scholar] [CrossRef]
- Diem, C. Blickverhalten von Kraftfahrern im Dynamischen Straßenverkehr; Darmstädter Lichttechnik, Utz: München, Germany, 2005. [Google Scholar]
- Underwood, G. Visual attention and the transition from novice to advanced driver. Ergonomics 2007, 50, 1235–1249. [Google Scholar] [CrossRef]
- Statistisches Bundesamt. Verkehrsunfälle-Zeitreihen—2019. 2020. Available online: https://www.destatis.de/DE/Themen/Gesellschaft-Umwelt/Verkehrsunfaelle/Publikationen/Downloads-Verkehrsunfaelle/verkehrsunfaelle-zeitreihen-pdf-5462403.html (accessed on 20 May 2021).
- Scott, P.P. The Relationship Between Road Lighting Quality and Accident Frequency; TRRL Laboratory Report; Transport and Road Research Laboratory: Crowthorne, UK, 1980. [Google Scholar]
- Sullivan, J.M.; Flannagan, M.J. The role of ambient light level in fatal crashes: Inferences from daylight saving time transitions. Accid. Anal. Prev. 2002, 34, 487–498. [Google Scholar] [CrossRef]
- Oya, H.; Ando, K.; Kanoshima, H. A research on interrelation between illuminance at intersections and reduction in traffic accidents. J. Light Vis. Environ. 2002, 26, 29–34. [Google Scholar] [CrossRef] [Green Version]
- Bullough, J.D.; Donnell, E.T.; Rea, M.S. To illuminate or not to illuminate: Roadway lighting as it affects traffic safety at intersections. Accid. Anal. Prev. 2013, 53, 65–77. [Google Scholar] [CrossRef]
- Jackett, M.; Frith, W. Quantifying the impact of road lighting on road safety—A New Zealand study. IATSS Res. 2013, 36, 139–145. [Google Scholar] [CrossRef] [Green Version]
- Fotios, S.; Gibbons, R. Road lighting research for drivers and pedestrians: The basis of luminance and illuminance recommendations. Light. Res. Technol. 2018, 50, 154–186. [Google Scholar] [CrossRef]
- Schlag, B.; Petermann, I.; Weller, G.; Schulze, C. Mehr Licht–mehr Sicht–mehr Sicherheit? Zur Wirkung verbesserter Licht- und Sichtbedingungen auf das Fahrerverhalten; VS Verlag für Sozialwissenschaften: Wiesbaden, Germany, 2009. [Google Scholar] [CrossRef]
- Eby, D.W.; Molnar, L.J.; Zhang, L.; St. Louis, R.M.; Zanier, N.; Kostyniuk, L.P.; Stanciu, S. Use, perceptions, and benefits of automotive technologies among aging drivers. Inj. Epidemiol. 2016, 3, 28. [Google Scholar] [CrossRef] [Green Version]
- Setyaningsih, E.; Suryo Putranto, L.; Soegijanto, R.; Soelami, F.X.N. Analysis of the visual safety perception and the clarity of traffic signs and road markings in the presence of road lighting in straight and curved road. MATEC Web Conf. 2018, 181, 04001. [Google Scholar] [CrossRef] [Green Version]
- Wagner, M.; Khanh, T.Q. Sicher durch die nächtliche Stadt–Helligkeits- und Kontrastwahrnehmung in der städtischen Straßenbeleuchtung aus Fahrersicht. Licht 2020, 72, 108–113. [Google Scholar]
- Wördenweber, B.; Lachmayer, R.; Witt, U. Intelligente Frontbeleuchtung. ATZ Automob. Z. 1996, 98, 546–551. [Google Scholar]
- Kosmas, K. Optimierung von adaptiven Kfz-Scheinwerfertechnologien zur Blendungsbegrenzung unter dynamischen Bedingungen. Ph.D. Thesis, Technical University of Darmstadt, Darmstadt, Germany, 2019. Available online: https://tuprints.ulb.tu-darmstadt.de/8747/ (accessed on 25 October 2021).
- Stamatiadis, N.; Psarianos, B.; Apostoleris, K.; Taliouras, P. Nighttime versus daytime horizontal curve design consistency: Issues and concerns. J. Transp. Eng. Part A Syst. 2020, 146, 04019080. [Google Scholar] [CrossRef]
- Plainis, S.; Murray, I.J.; Pallikaris, I.G. Road traffic casualties: Understanding the night-time death toll. Inj. Prev. 2006, 12, 125–128. [Google Scholar] [CrossRef] [Green Version]
- Wanvik, P.O. Effects of road lighting: An analysis based on Dutch accident statistics 1987–2006. Accid. Anal. Prev. 2009, 41, 123–128. [Google Scholar] [CrossRef]
- Damasky, J. Lichttechnische Entwicklung von Anforderungen an Kraftfahrzeugscheinwerfer. Ph.D. Thesis, Technische Hochschule Darmstadt, Darmstadt, Germany, 1995. [Google Scholar]
- Fechner, G.T. Elemente der Psychophysik: Erster Theil; Breitkopf und Härtel: Leipzig, Germany, 1860. [Google Scholar]
- Schmidt-Clausen, H.J.; Freiding, A. Sehvermögen von Kraftfahrern und Lichtbedingungen im nächtlichen Straßenverkehr. In Berichte der Bundesanstalt für Straßenwesen M, Mensch und Sicherheit; Wirtschaftsverl. NW Verl. für neue Wiss: Bremerhaven, Germany, 2004; Volume 158. [Google Scholar]
- Plainis, S.; Murray, I.J. Reaction times as an index of visual conspicuity when driving at night. Ophthalmic Physiol. Opt. 2002, 22, 409–415. [Google Scholar] [CrossRef]
- Graf, C.P.; Krebs, M.J. Headlight Factors and Nighttime Vision: Final Report; DOT HS-802 102; U.S. Department of Transportation, National Highway Traffic Safety Administration: Washington, DC, USA, 1976.
- Chmielarz, M.; Schneider, W.; Sprenger, A.; Theil, L. Blickverteilung beim Fahren in PKW bei Nacht. In Blickfixationen und Blickbewegungen des Fahrzeugführers sowie Hauptsichtbereiche an der Windschutzscheibe (FAT-Schriftenreihe Nr. 151); Brückmann, R., Ed.; Verband der Automobilindustrie e. V. (VDA): Berlin, Germany, 2000; pp. 43–59. [Google Scholar]
- Garay-Vega, L.; Fisher, D.L.; Pollatsek, A. Hazard anticipation of novice and experienced drivers: Empirical evaluation on a driving simulator in daytime and nighttime conditions. Transp. Res. Rec. 2007, 2009, 1–7. [Google Scholar] [CrossRef]
- Cengiz, C.; Kotkanen, H.; Puolakka, M.; Lappi, O.; Lehtonen, E.; Halonen, L.; Summala, H. Combined eye-tracking and luminance measurements while driving on a rural road: Towards determining mesopic adaptation luminance. Light. Res. Technol. 2014, 46, 676–694. [Google Scholar] [CrossRef]
- Grüner, M.; Ansorge, U. Mobile eye tracking during real-world night driving: A selective review of findings and recommendations for future research. J. Eye Mov. Res. 2017, 10, 1–18. [Google Scholar] [CrossRef]
- Kobbert, J. Optimization of Automotive Light Distributions for Different Real Life Traffic Situations. Ph.D. Thesis, Technical University of Darmstadt, Darmstadt, Germany, 2019. Available online: https://tuprints.ulb.tu-darmstadt.de/8382/ (accessed on 25 October 2021).
- Cohen, A.S.; Hirsig, R. Zur Bedeutung des Fovealen Sehens für die Informationsaufnahme bei hoher Beanspruchung. In Sicht und Sicherheit im Straßenverkehr–Beiträge zur interdisziplinären Diskussion; Derkum, H., Ed.; Verlag TÜV Rheinland: Köln, Germany, 1990; pp. 47–58. [Google Scholar]
- Damasky, J.; Hosemann, A. The Influence of the Light Distribution of Headlamps on Drivers Fixation Behaviour at Nighttime; SAE Technical Paper Series; SAE International 400 Commonwealth Drive: Warrendale, PA, USA, 1998. [Google Scholar] [CrossRef]
- Brückmann, R.; Gottlieb, W.; Hatzius, J.; Hosemann, A.; Reitter, C.; Rößger, P. Blickbewegungen des Fahrers bei Nacht bei alternativen Kfz-Scheinwerfern. In Blickfixationen und Blickbewegungen des Fahrzeugführers sowie Hauptsichtbereiche an der Windschutzscheibe (FAT-Schriftenreihe Nr. 151); Brückmann, R., Ed.; Verband der Automobilindustrie e. V. (VDA): Berlin, Germany, 2000; pp. 107–187. [Google Scholar]
- Hamm, M.; Friedrich, A. Intelligente, adaptive Scheinwerfersysteme: Die Fahrzeug-Außenbeleuchtung der Zukunft. ATZ Automob. Z. 2000, 102, 1042–1047. [Google Scholar] [CrossRef]
- Schreuder, D.A. Straßenbeleuchtung für Sicherheit und Verkehr; Shaker: Aachen, Germany, 2001. [Google Scholar]
- Kleinkes, M. Objektivierte Bewertung des Gütemerkmals Homogenität für Scheinwerfer-Lichtverteilungen, 1st ed.; Berichte aus der Physik, Shaker: Aachen, Germany, 2003. [Google Scholar]
- Loewen, L.J.; Steel, G.D.; Suedfeld, P. Perceived safety from crime in the urban environment. J. Environ. Psychol. 1993, 13, 323–331. [Google Scholar] [CrossRef]
- Boyce, P.R.; Eklund, N.H.; Hamilton, B.J.; Bruno, L.D. Perceptions of safety at night in different lighting conditions. Light. Res. Technol. 2000, 32, 79–91. [Google Scholar] [CrossRef]
- Blöbaum, A.; Hunecke, M. Perceived Danger in Urban Public Space. Environ. Behav. 2005, 37, 465–486. [Google Scholar] [CrossRef]
- Haans, A.; de Kort, Y.A. Light distribution in dynamic street lighting: Two experimental studies on its effects on perceived safety, prospect, concealment, and escape. J. Environ. Psychol. 2012, 32, 342–352. [Google Scholar] [CrossRef]
- Boomsma, C.; Steg, L. Feeling Safe in the Dark. Environ. Behav. 2014, 46, 193–212. [Google Scholar] [CrossRef]
- Fotios, S.; Unwin, J.; Farrall, S. Road lighting and pedestrian reassurance after dark: A review. Light. Res. Technol. 2015, 47, 449–469. [Google Scholar] [CrossRef] [Green Version]
- Peña-García, A.; Hurtado, A.; Aguilar-Luzón, M.C. Impact of public lighting on pedestrians’ perception of safety and well-being. Saf. Sci. 2015, 78, 142–148. [Google Scholar] [CrossRef]
- Linschoten, M.R.; Harvey, L.O.; Eller, P.M.; Jafek, B.W. Fast and accurate measurement of taste and smell thresholds using a maximum-likelihood adaptive staircase procedure. Percept. Psychophys. 2001, 63, 1330–1347. [Google Scholar] [CrossRef]
- Deutsches Institut für Normung, e.V. DIN EN 13201-2:2016-06, Straßenbeleuchtung—Teil 2: Gütemerkmale; Deutsche Fassung (EN 13201-2:2015); Deutsches Institut für Normung e.V. (DIN): Berlin, Germany, 2016. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| v in km h | ||
|---|---|---|
| 0 | 0.96 | 0.21 |
| 30 | 0.82 | 0.40 |
| 60 | 0.96 | 0.23 |
| in cd m | p-Value | |
|---|---|---|
| 0.13 | 21.59 | |
| 0.41 | 11.77 | |
| 0.85 | 24.96 | |
| 1.16 | 7.89 | |
| 1.34 | 18.35 | |
| 2.08 | 15.92 |
| in in cd m | Compared Velocities | |||||
|---|---|---|---|---|---|---|
| 0 km h ↔ 30 km h | 30 km h ↔ 60 km h | 0 km h ↔ 60 km h | ||||
| p | z | p | z | p | z | |
| 0.13 | −2.22 | * | −3.07 | * | −4.02 | |
| 0.41 | −2.31 | −0.79 | * | −3.25 | ||
| 0.85 | −1.31 | * | −3.97 | * | −3.12 | |
| 1.16 | * | −2.49 | −1.51 | * | −2.83 | |
| 1.34 | * | −3.73 | −1.66 | * | −3.19 | |
| 2.08 | −1.27 | * | −3.47 | * | −3.50 | |
| v in km h | ||
|---|---|---|
| 0 | 0.96 | 0.08 |
| 30 | 0.74 | 0.18 |
| 60 | 0.87 | 0.12 |
| v in km h | Required Luminance in cd m | |||
|---|---|---|---|---|
| 50% | 75% | 90% | 99% | |
| 0 | 0.88 | 1.21 | 1.65 | 3.27 |
| 30 | 1.21 | 1.65 | 2.26 | 4.48 |
| 50 | 1.43 | 1.95 | 2.67 | 5.30 |
| 60 | 1.54 | 2.10 | 2.88 | 5.70 |
| 100 | 1.98 | 2.70 | 3.70 | 7.33 |
| 130 | 2.31 | 3.15 | 4.31 | 8.55 |
| Class | Minimum Average Roadway Luminance in cd m | Difference to DIN EN 13201 in cd m | |||||
|---|---|---|---|---|---|---|---|
| DIN EN 13201 | Dare to Drive | 50% | 90% | Dare to Drive | 50% | 90% | |
| “Bright” | “Bright” | “Bright” | “Bright” | ||||
| M1 | 2.00 | 0.41 | 1.43 | 2.67 | −1.59 | −0.57 | 0.67 |
| M2 | 1.50 | −1.09 | −0.07 | 1.17 | |||
| M3 | 1.00 | −0.59 | 0.43 | 1.67 | |||
| M4 | 0.75 | −0.34 | 0.68 | 1.92 | |||
| M5 | 0.50 | −0.09 | 0.93 | 2.17 | |||
| M6 | 0.30 | 0.11 | 1.13 | 2.37 | |||
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Erkan, A.; Babilon, S.; Hoffmann, D.; Singer, T.; Vitkov, T.; Khanh, T.Q. Determination of Speed-Dependent Roadway Luminance for an Adequate Feeling of Safety at Nighttime Driving. Vehicles 2021, 3, 821-839. https://doi.org/10.3390/vehicles3040049
Erkan A, Babilon S, Hoffmann D, Singer T, Vitkov T, Khanh TQ. Determination of Speed-Dependent Roadway Luminance for an Adequate Feeling of Safety at Nighttime Driving. Vehicles. 2021; 3(4):821-839. https://doi.org/10.3390/vehicles3040049
Chicago/Turabian StyleErkan, Anil, Sebastian Babilon, David Hoffmann, Timo Singer, Tsoni Vitkov, and Tran Quoc Khanh. 2021. "Determination of Speed-Dependent Roadway Luminance for an Adequate Feeling of Safety at Nighttime Driving" Vehicles 3, no. 4: 821-839. https://doi.org/10.3390/vehicles3040049