
An Approach to the Definition of the Aerodynamic Comfort of Motorcycle Helmets


 ,
,  , and
, and
Abstract
:1. Introduction
2. Materials and Methods
2.1. The Wind Tunnel Facilities
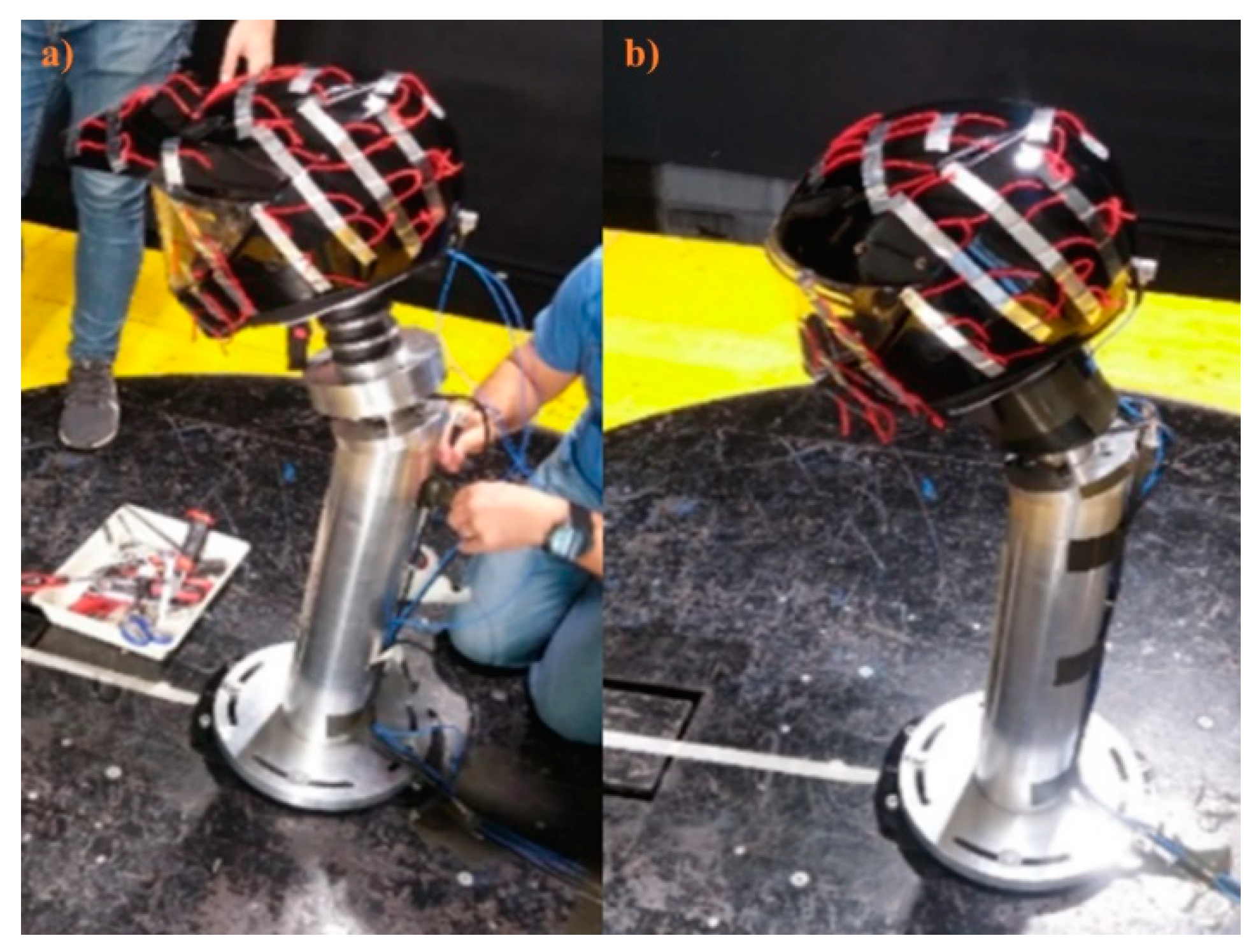
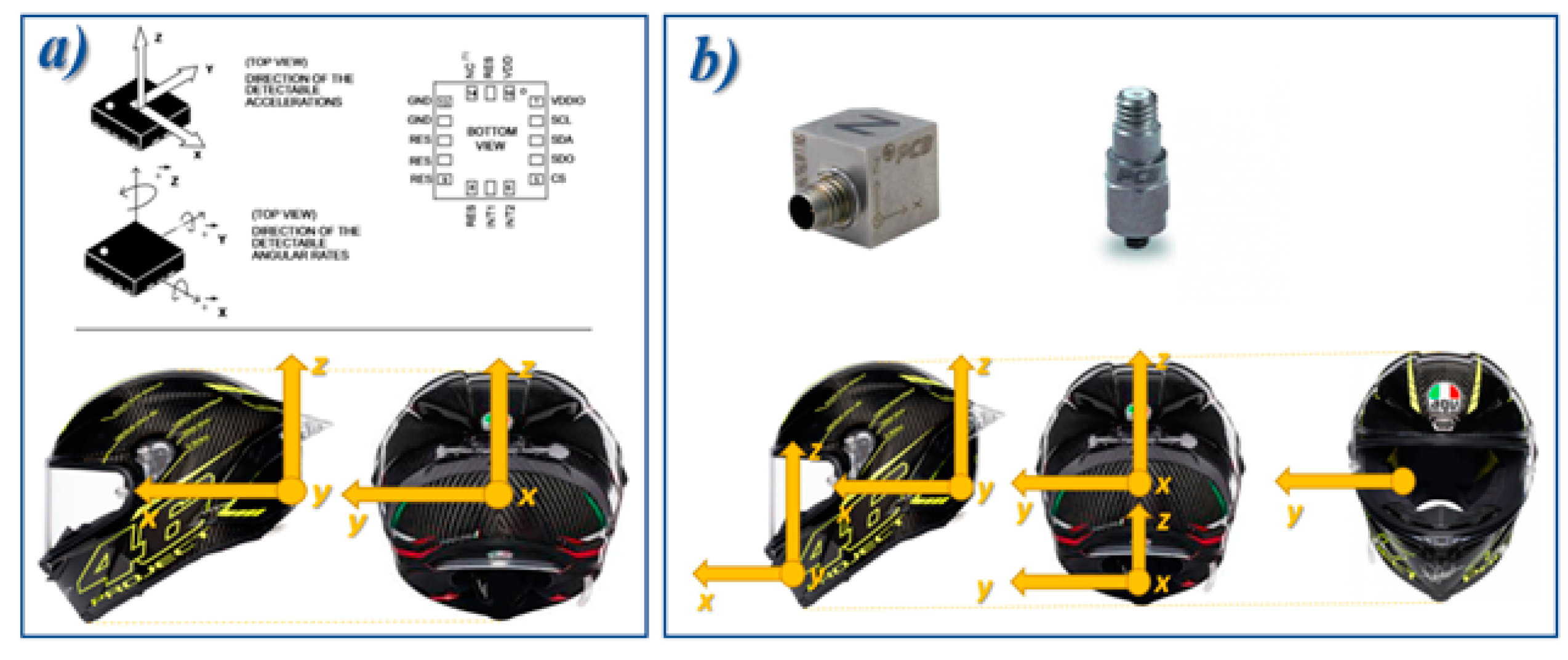
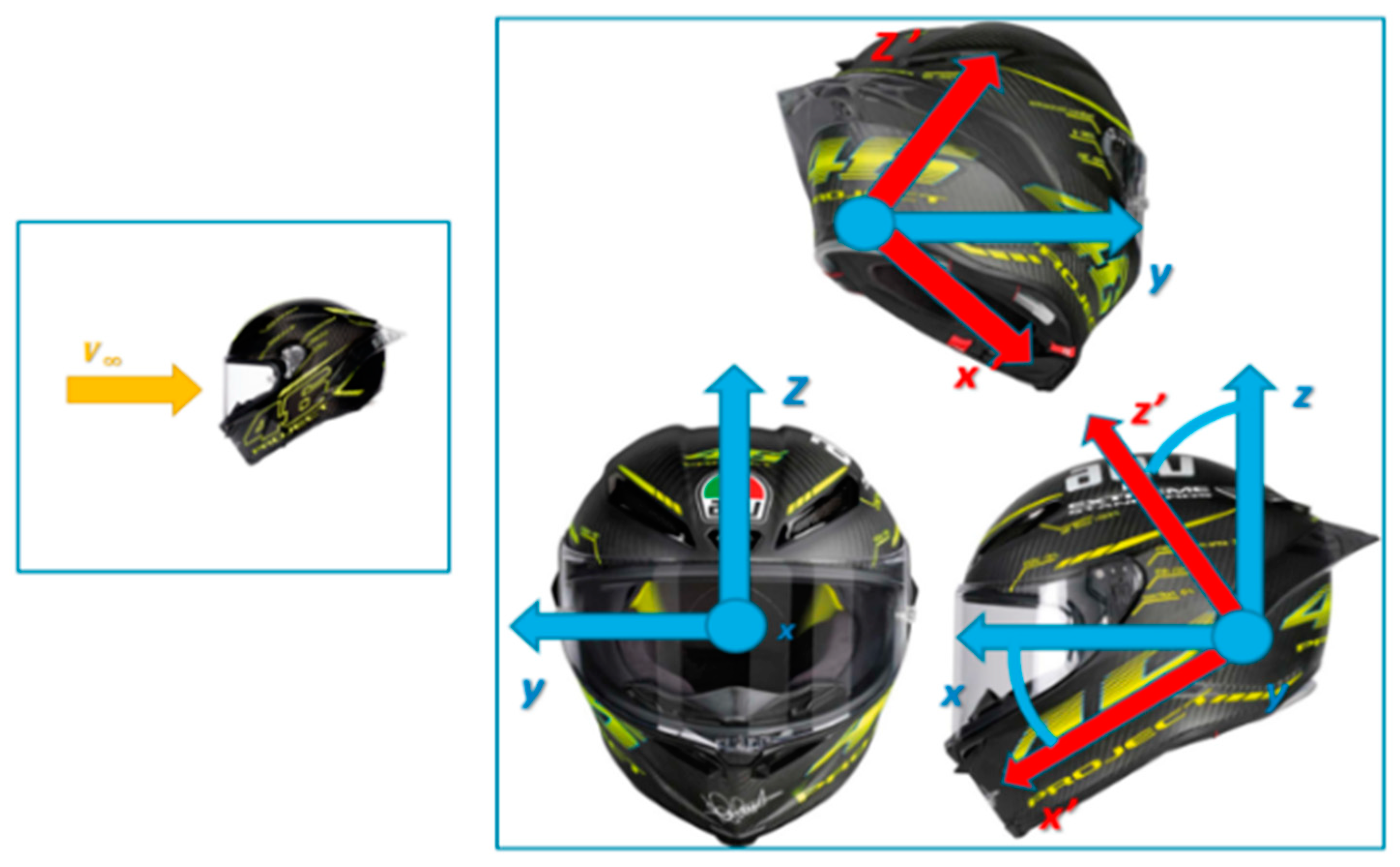
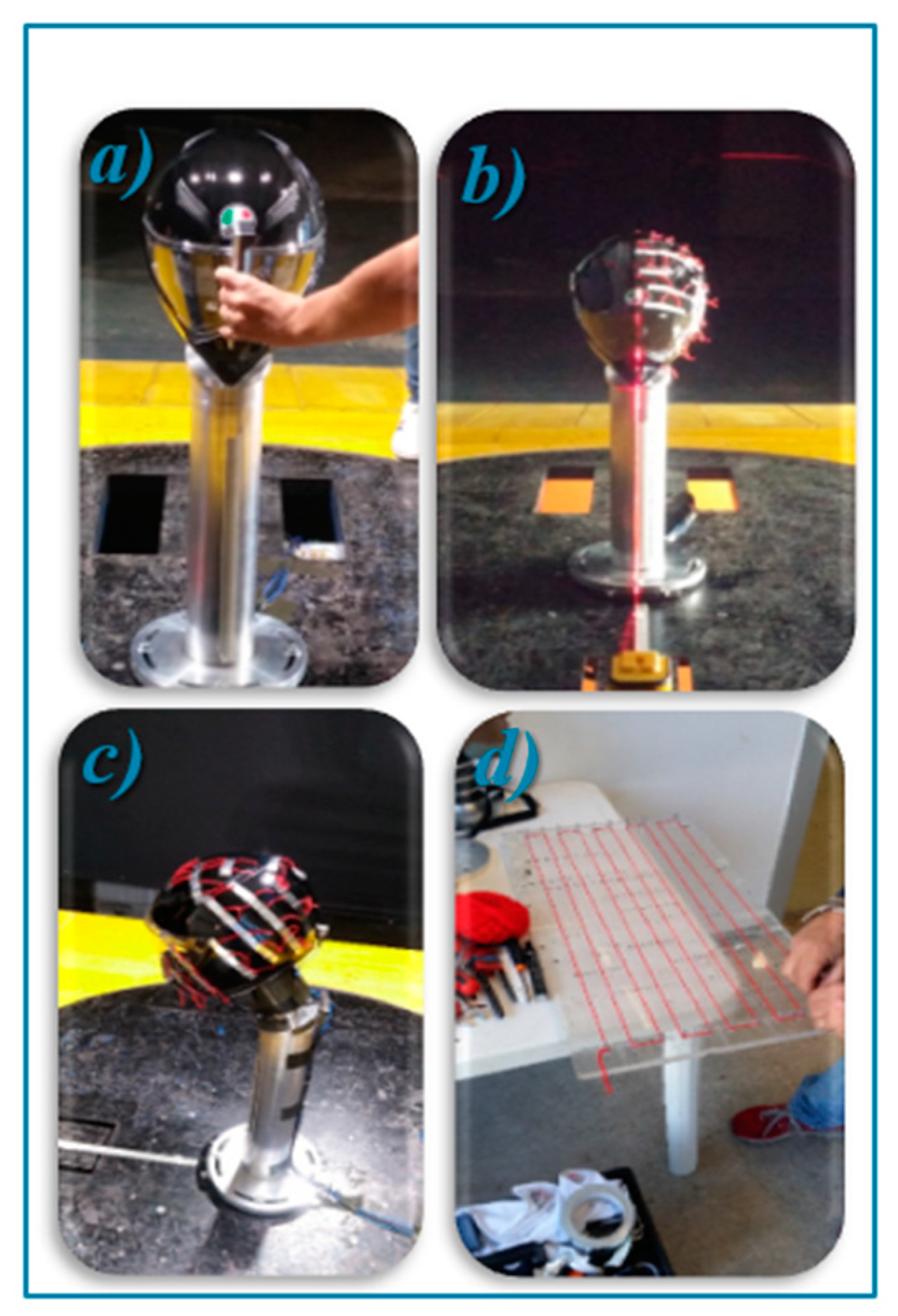
2.2. The Experimental Setup
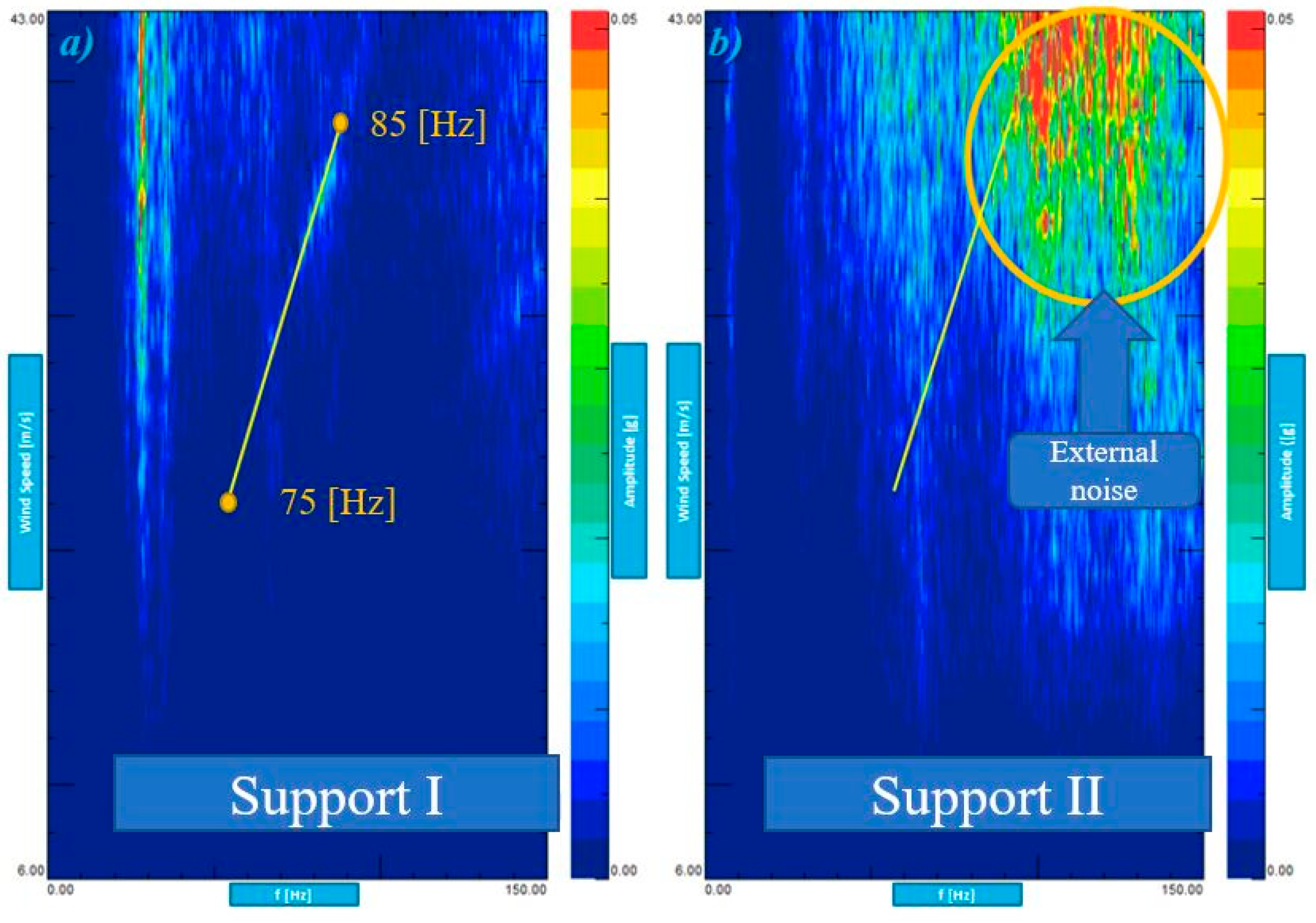
- Support I: Hybrid 3. It was made up of aluminum discs interposed with rubber discs, which represent the vertebrae and that confers to the manikin neck a very similar response to that of the human neck, without the need of having to use a human subject to carry out the tests.
- Support II: Rigid. The effects related to the stiffness of the neck-head system are neglected.
3. Theoretical background
3.1. Gramian Angular Field
- One-to-one mapping of the time series to the results of the polar coordinates; therefore, it is bijective.
- The temporal relationships are preserved.
3.2. Experimental Computer Analysis
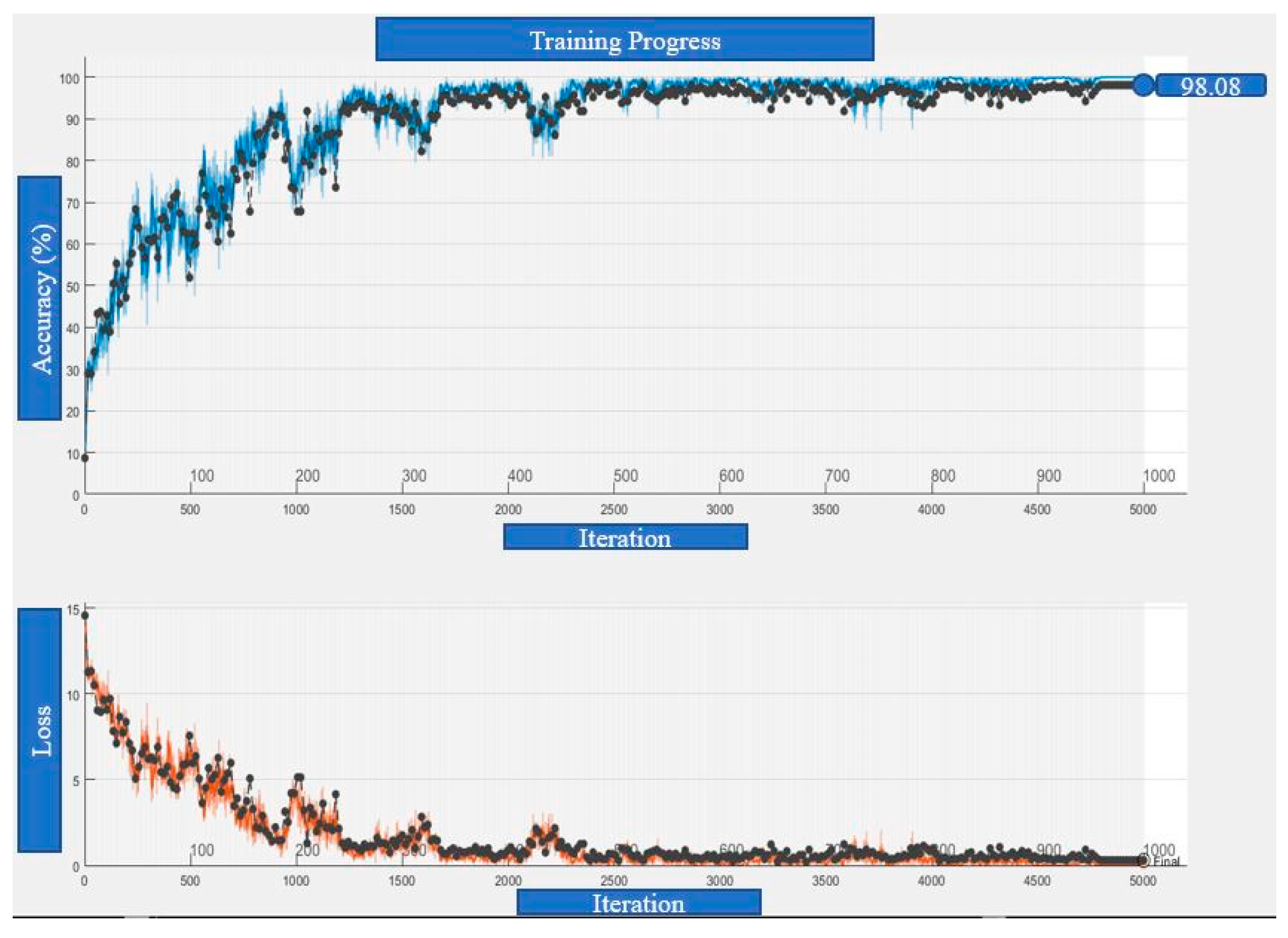
3.3. Convolutional Neural Network
4. Results and Discussions
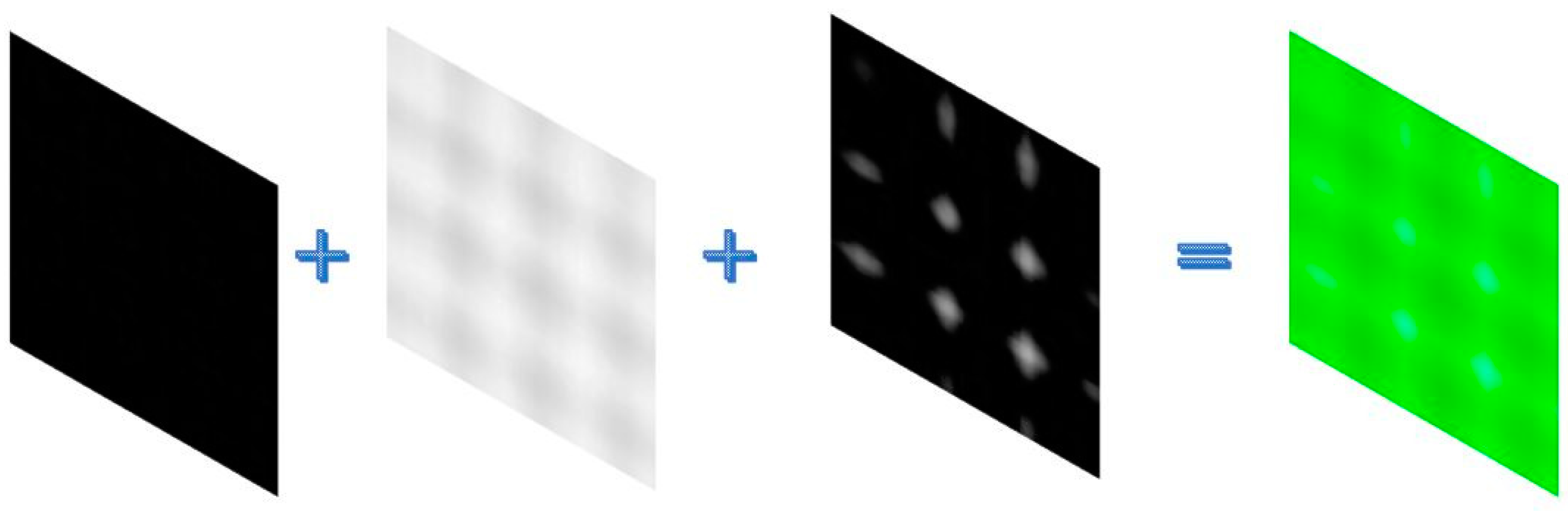
- Red—Moment along the x axis.
- Green—Force along the y axis.
- Blue—Left sound level meter.
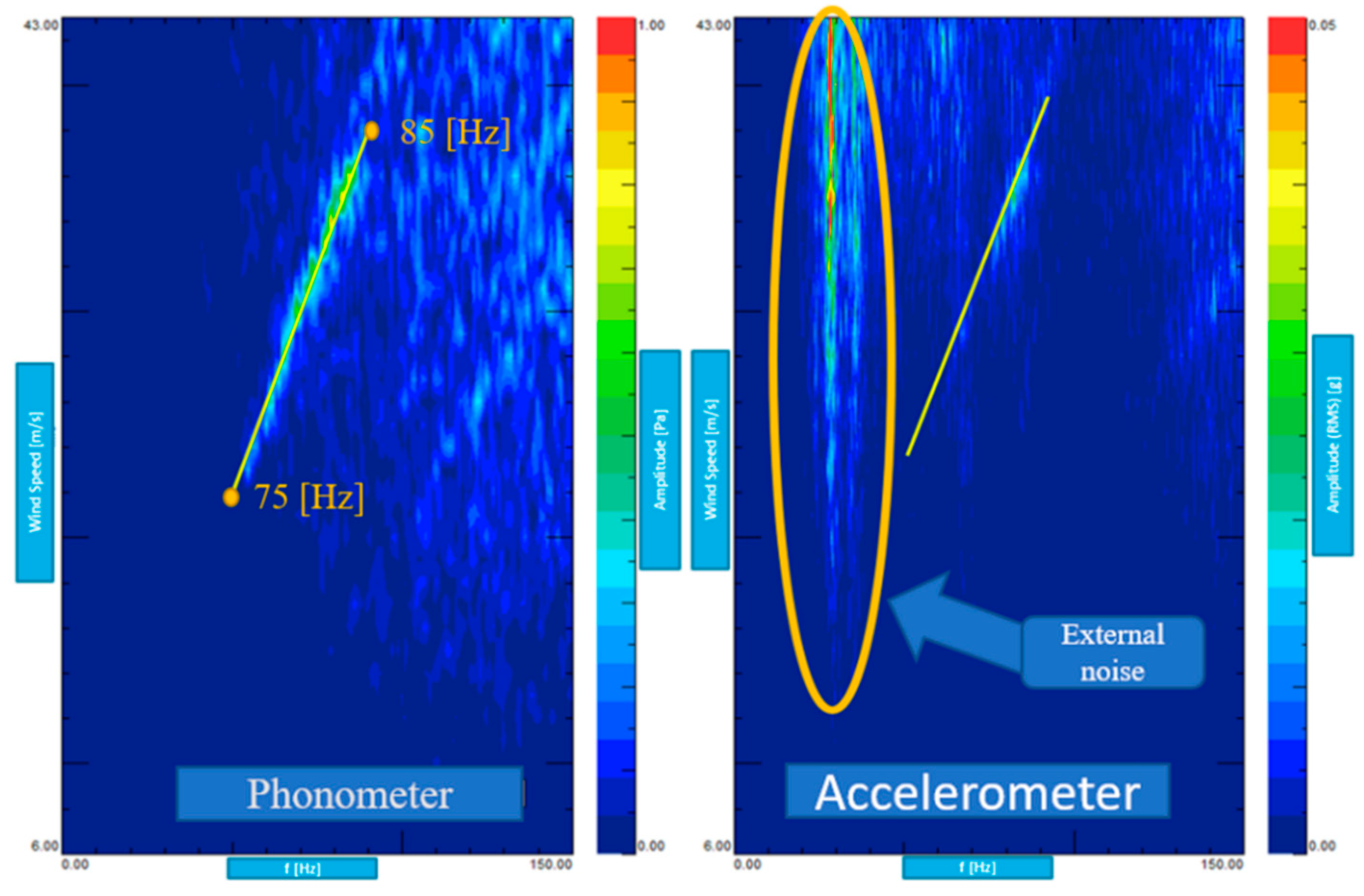
- The phonometric data are less affected by external noise compared to accelerometers.
- Analyzing the load cells, forces along the y axis and the moments along the x axis present a greater intensity than the other components.
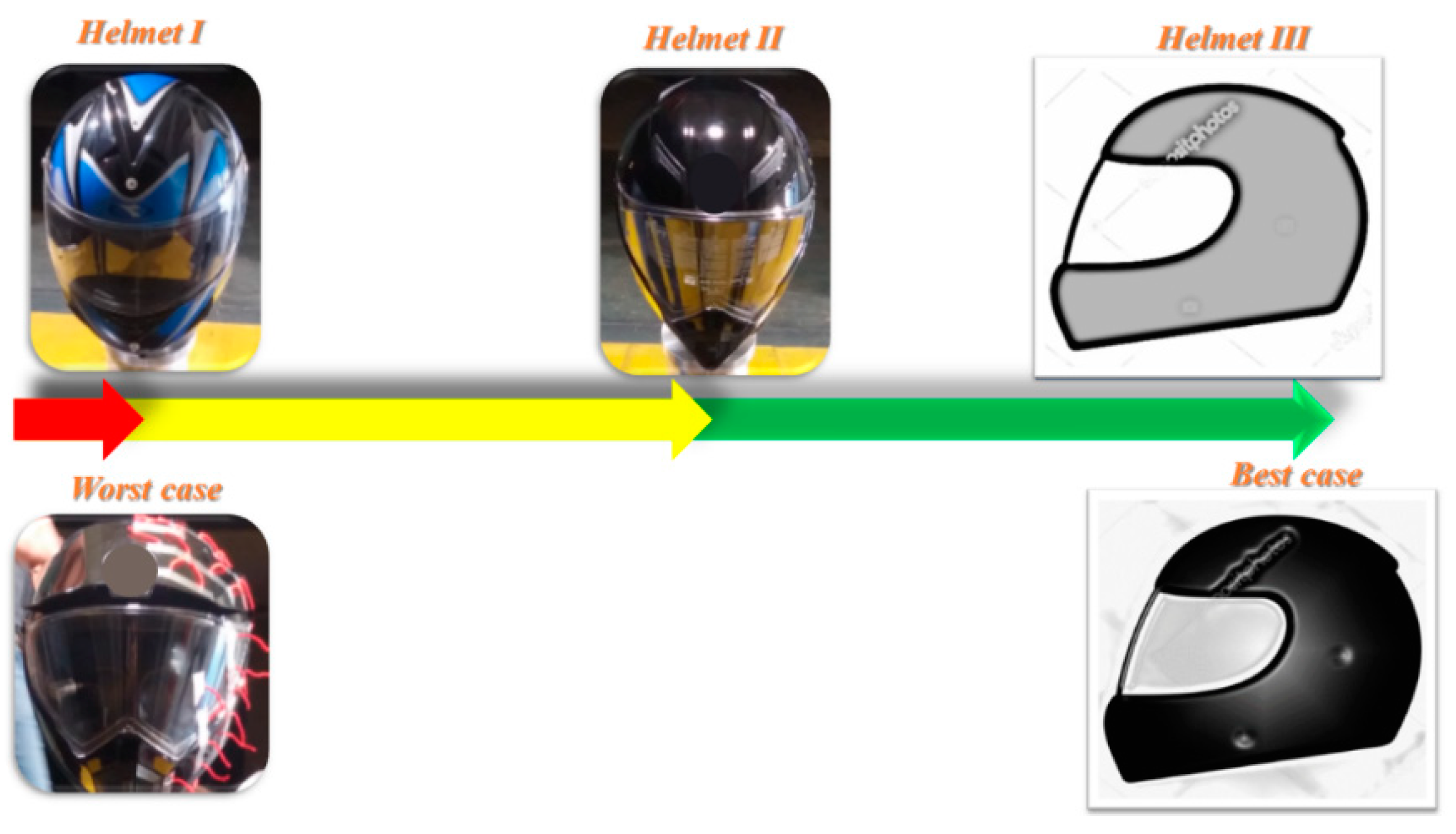
- Helmet I: corresponds to 98.8% to the worst helmet and 0.2% to the best;
- Helmet II: corresponds to 50% to the worst helmet and 50% to the best;
- Helmet III: corresponds to 0.8% for the worst helmet and 98.2% for the best.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Al-Dhahebi, A.M.; Junoh, A.K.; Mohamed, Z.; Muhamad, W.Z.A.W. A computational approach for optimizing vehicles’ interior noise and vibration. Int. J. Automot. Mech. Eng. 2017, 14, 4690–4703. [Google Scholar] [CrossRef]
- Yan, L.; Chen, Z.; Zou, Y.; He, X.; Cai, C.; Yu, K.; Zhu, X. Field study of the interior noise and vibration of a metro vehicle running on a viaduct: A case study in Guangzhou. Int. J. Environ. Res. Public Health 2020, 17, 2807. [Google Scholar] [CrossRef] [Green Version]
- Angeletti, M.; Sclafani, L.; Bella, G.; Ubertini, S. The role of CFD on the aerodynamic investigation of motorcycles. SAE Trans. 2003, 112, 1103–1111. [Google Scholar] [CrossRef]
- Scappaticci, L.; Risitano, G.; Battistoni, M.; Grimaldi, C. Drag Optimization of a Sport Motorbike; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2012. [Google Scholar] [CrossRef]
- Mariani, F.; Risi, F.; Bartolini, N.; Castellani, F.; Scappaticci, L. Spoilers Optimization to Reduce the Induced Stresses on a Racing Helmet; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2016. [Google Scholar] [CrossRef]
- Harris, C.M.; Bert, C.W. Shock and vibration handbook. J. Appl. Mech. 1989, 56, 487. [Google Scholar] [CrossRef] [Green Version]
- Tamer, A.; Zanoni, A.; Cocco, A.; Masarati, P. A numerical study of vibration-induced instrument reading capability degradation in helicopter pilots. CEAS Aeronaut. J. 2021, 12, 427–440. [Google Scholar] [CrossRef]
- Griffin, M.J.; Erdreich, J. Handbook of human vibration. J. Acoust. Soc. Am. 1991, 90, 2213. [Google Scholar] [CrossRef]
- Griffin, M.J. Vibration and human responses. In Handbook of Human Vibration; Academic Press: Cambridge, MA, USA, 1990. [Google Scholar]
- Hulshof, C.; Van Zanten, B.V. Whole-body vibration and low-back pain—A review of epidemiologic studies. Int. Arch. Occup. Environ. Health 1987, 59, 205–220. [Google Scholar] [CrossRef]
- Fairley, T.E. Predicting the discomfort caused by tractor vibration. Ergonomics 1995, 38, 2091–2106. [Google Scholar] [CrossRef]
- Gillespie, T.D.; Sayers, M.W.; Segel, L. Calibration of Response-Type Road Roughness Measuring Systems; TRB, National Research Council: Washington, DC, USA, 1980. [Google Scholar]
- Crocker, M.J.; Ramakrishnan, R. Handbook of noise and vibration control. Noise Control. Eng. J. 2008, 56, 218. [Google Scholar] [CrossRef]
- Tamer, A.; Muscarello, V.; Quaranta, G.; Masarati, P. Cabebin layout optimization for vibration hazard reduction in helicopter emergency medical service. Aerospace 2020, 7, 59. [Google Scholar] [CrossRef]
- Tamer, A.; Muscarello, V.; Masarati, P.; Quaranta, G. Evaluation of vibration reduction devices for helicopter ride quality improvement. Aerosp. Sci. Technol. 2019, 95, 105456. [Google Scholar] [CrossRef]
- Measuring Vibration. Available online: https://www.bksv.com/en/knowledge/blog/vibration/measuring-vibration (accessed on 1 August 2021).
- Mechanical Vibration and Shock—Evaluation of Human Exposure to Whole-Body Vibration; ANSI: New York, NY, USA, 2001.
- Von Gierke, H.E.; Brammer, A.J. Harris’ Shock and Vibration Handbook; Mcgraw-Hill: New York, NY, USA, 2007. [Google Scholar]
- Licht, T.R.; Zaveri, K. Vibration and shock measurement. Meas. Control. 1982, 15, 9–13. [Google Scholar] [CrossRef]
- Berthoz, A. The Brain’s Sense of Movement; Harvard University Press: Cambridge, MA, USA, 2000. [Google Scholar]
- Pennestri, E.; Valentini, P.P.; Vita, L. Comfort analysis of car occupants: Comparison between multibody and finite element models. Int. J. Veh. Syst. Model. Test. 2005, 1, 68–78. [Google Scholar] [CrossRef] [Green Version]
- De Lange, R.; Van Rooij, L.; Mooi, H.; Wismans, J. Objective Biofidelity Rating of a Numerical Human Occupant Model in Frontal to Lateral Impact; SAE Technical Paper; SAE International: Warrendale, PA, USA, 2005. [Google Scholar] [CrossRef]
- Dieckmann, D. A Study of the influence of vibration on man. Ergonomics 1958, 1, 347–355. [Google Scholar] [CrossRef]
- Coermann, R.R.; Ziegenruecker, G.H.; Wittwer, A.L.; Von Gierke, H.E. The passive dynamic mechanical properties of the human thorax-abdomen system and of the whole body system. Aerosp. Med. 1960, 31, 443–455. [Google Scholar] [PubMed]
- Magid, E.B.; Coermann, R.R.; Ziegenruecker, G.H. Human tolerance to whole body sinusoidal vibration. Short-time, one-minute and three-minute studies. Aerosp. Med. 1960, 31, 915–924. [Google Scholar] [PubMed]
- Chaffin, D.B. A computerized biomechanical model—Development of and use in studying gross body actions. J. Biomech. 1969, 2, 429–441. [Google Scholar] [CrossRef] [Green Version]
- Gruver, W.A.; Ayoub, M.A.; Muth, M.B. A model for optimal evaluation of manual lifting tasks. J. Saf. Res. 1979, 11, 61–71. [Google Scholar]
- Kane, T.R.; Scher, M.P. Human self-rotation by means of limb movements. J. Biomech. 1970, 39–49. [Google Scholar] [CrossRef]
- Passerello, C.; Huston, R. Human attitude control. J. Biomech. 1971, 4, 95–102. [Google Scholar] [CrossRef]
- ISO. International Standard ISO 2631-4; ISO—International Organization for Standardization: Geneva, Switzerland, 2001. [Google Scholar]
- ISO. ISO 2631-5:2018 International Standard Mechanical Vibration—Evaluation; ISO: Geneva, Switzerland, 2018. [Google Scholar]
- ISO-International Organization for Standardization. ISO 2631-1: Mechanical Vibration and Shock-Evaluation of Human Exposure to Whole-Body Vibration-Part 1: General Requirements; ISO-International Organization for Standardization: Geneva, Switzerland, 2010. [Google Scholar]
- Wang, Z.; Oates, T. Imaging time-series to improve classification and imputation. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, Buenos Aires, Argentina, 25–31 July 2015. [Google Scholar]
- Dengwen, Z. An edge-directed bicubic interpolation algorithm. In Proceedings of the Twenty-Fourth International Joint Conference on Artificial Intelligence, Yantai, China, 16–18 October 2010; Volume 3, pp. 1186–1189. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going deeper with convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015. [Google Scholar] [CrossRef] [Green Version]
- Zeng, G.; He, Y.; Yu, Z.; Yang, X.; Yang, R.; Zhang, L. InceptionNet/googlenet-going deeper with convolutions. Cvpr 2016, 91, 2322–2330. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet classification with deep convolutional neural networks. Commun. ACM 2017, 60, 84–90. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Test A | Test B | Test C | |
|---|---|---|---|
| Number of helmets chosen | 4 | 5 | 5 |
| Used neck | Hybrid 3 | Rigid neck | Rigid neck |
| Time interval duration | 30 s | 30 s | 30 s |
| Wind speed | 160 km/h | 160 km/h | Ramped (0–160 km/h) |
| Monoaxial accelerometer | // | // | PCB 353B44 |
| Triaxial accelerometer | LGA-16L | LGA-16L | PCB 356A15 |
| Sound level meter | // | // | G.r.a.s. 40a0 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Scappaticci, L.; Risitano, G.; Santonocito, D.; D’Andrea, D.; Milone, D. An Approach to the Definition of the Aerodynamic Comfort of Motorcycle Helmets. Vehicles 2021, 3, 545-556. https://doi.org/10.3390/vehicles3030033
Scappaticci L, Risitano G, Santonocito D, D’Andrea D, Milone D. An Approach to the Definition of the Aerodynamic Comfort of Motorcycle Helmets. Vehicles. 2021; 3(3):545-556. https://doi.org/10.3390/vehicles3030033
Chicago/Turabian StyleScappaticci, Lorenzo, Giacomo Risitano, Dario Santonocito, Danilo D’Andrea, and Dario Milone. 2021. "An Approach to the Definition of the Aerodynamic Comfort of Motorcycle Helmets" Vehicles 3, no. 3: 545-556. https://doi.org/10.3390/vehicles3030033