
A Multiple Criteria Decision-Making Method Generated by the Space Colonization Algorithm for Automated Pruning Strategies of Trees


Abstract
:1. Introduction
2. Methodology
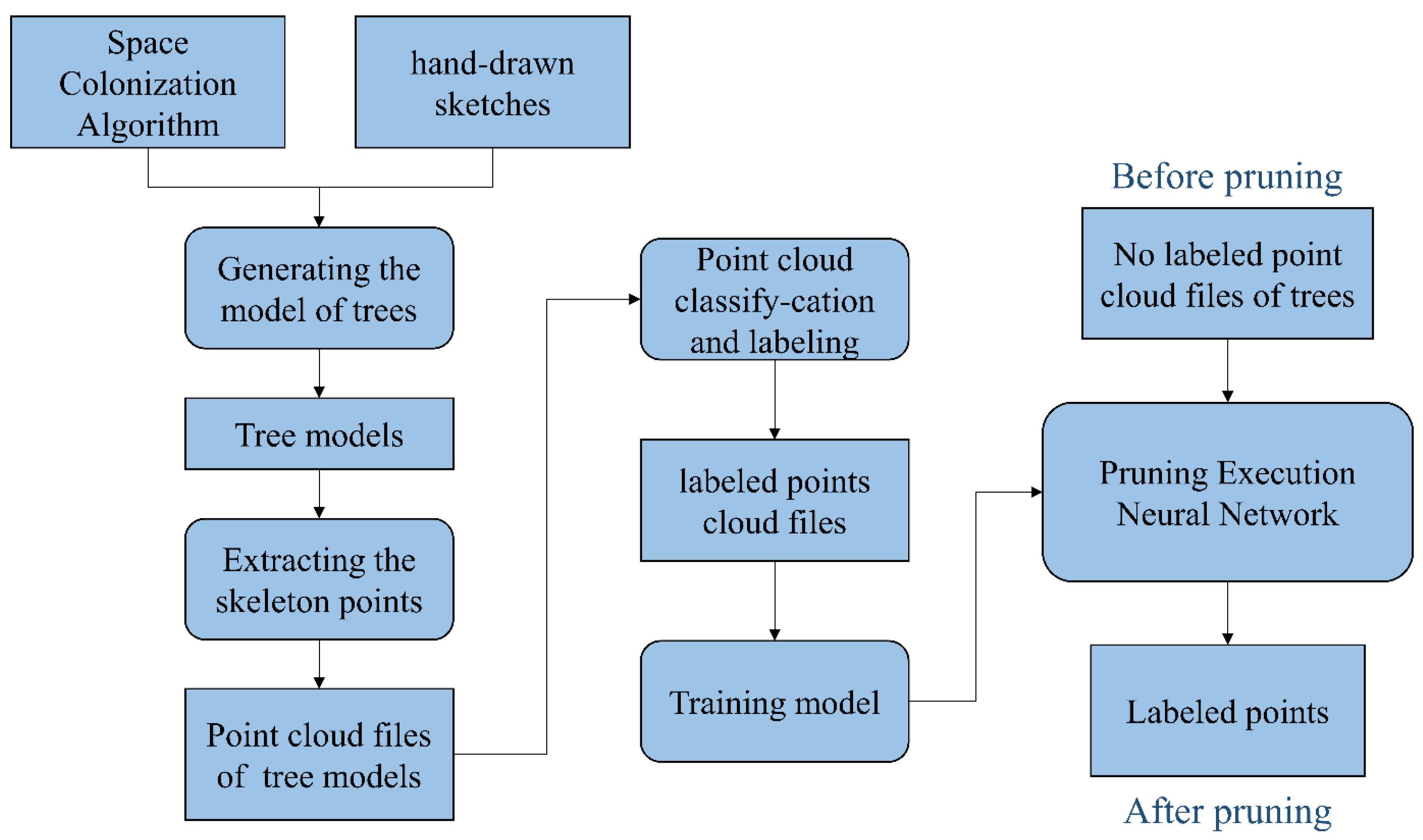
2.1. Space Colonization Algorithm for 3D Tree Generation
2.2. Proposed Deep Learning Architecture for Automated Pruning
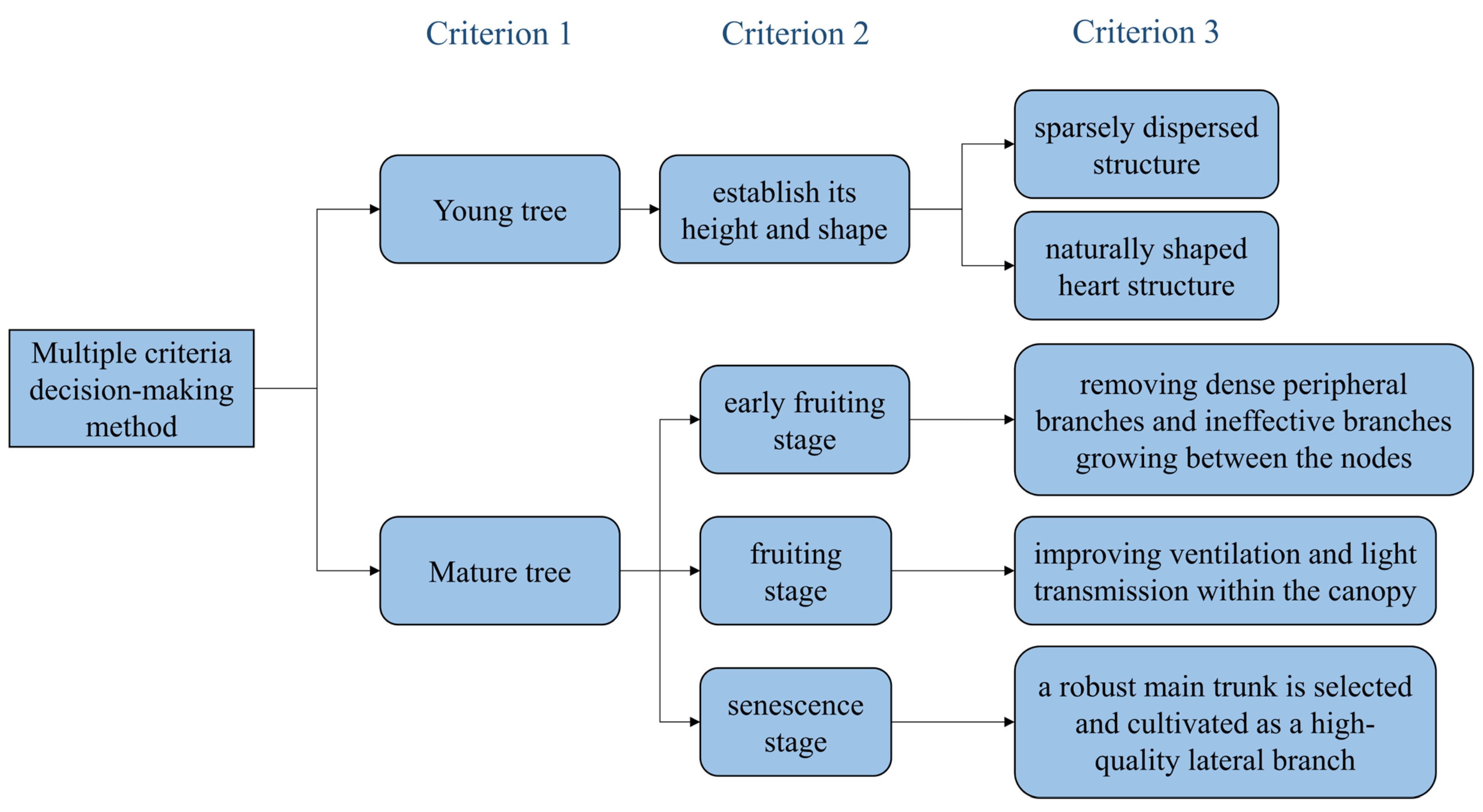
2.3. Multiple Criteria Decision-Making Method
3. Experimental Setup
3.1. Dataset
3.2. Metrics for Evaluating Pruning Performances
4. Result and Discussion
4.1. The Invalid Tree Models Generated by SCA
4.2. The Performance Metrics of the Deep Learning Method for Pruning
4.3. Comparison with Other Methods
5. Conclusions and Future Work
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- He, L.; Schupp, J. Sensing and Automation in Pruning of Apple Trees: A Review. Agronomy 2018, 8, 211. [Google Scholar] [CrossRef]
- Gongal, A.; Amatya, S.; Karkee, M.; Zhang, Q.; Lewis, K. Sensors and Systems for Fruit Detection and Localization: A Review. Comput. Electron. Agric. 2015, 116, 8–19. [Google Scholar] [CrossRef]
- Tang, L.; Chen, C.; Huang, H.; Lin, D. An Integrated System for 3D Tree Modeling and Growth Simulation. Environ. Earth Sci. 2015, 74, 7015–7028. [Google Scholar] [CrossRef]
- Runions, A.; Lane, B.; Prusinkiewicz, P. Modeling Trees with a Space Colonization Algorithm. Nph 2007, 7, 6. [Google Scholar]
- Liu, Y.; Guo, J.; Benes, B.; Deussen, O.; Zhang, X.; Huang, H. TreePartNet: Neural Decomposition of Point Clouds for 3D Tree Reconstruction. ACM Trans. Graph. 2021, 40, 232. [Google Scholar] [CrossRef]
- Xu, Y.; Hu, C.; Xie, Y. An Improved Space Colonization Algorithm with DBSCAN Clustering for a Single Tree Skeleton Extraction. Int. J. Remote Sens. 2022, 43, 3692–3713. [Google Scholar] [CrossRef]
- Guo, J.; Jiang, H.; Benes, B.; Deussen, O.; Zhang, X.; Lischinski, D.; Huang, H. Inverse Procedural Modeling of Branching Structures by Inferring L-Systems. ACM Trans. Graph. 2020, 39, 115. [Google Scholar] [CrossRef]
- Crimaldi, M.; Cartenì, F.; Giannino, F. VISmaF: Synthetic Tree for Immersive Virtual Visualization in Smart Farming. Part I: Scientific Background Review and Model Proposal. Agronomy 2021, 11, 2458. [Google Scholar] [CrossRef]
- Crimaldi, M.; Cartenì, F.; Bonanomi, G.; Giannino, F. Integration of a System Dynamics Model and 3D Tree Rendering—VISmaF Part II: Model Development, Results and Potential Agronomic Applications. Agronomy 2023, 13, 218. [Google Scholar] [CrossRef]
- Anastasiou, E.; Balafoutis, A.; Theocharis, S.; Theodorou, N.; Koundouras, S.; Fountas, S. Assessment of Laser Scanner Use under Different Settings in Two Differently Managed Vineyards for Estimating Pruning Wood Parameters. AgriEngineering 2022, 4, 733–746. [Google Scholar] [CrossRef]
- Verbiest, R.; Ruysen, K.; Vanwalleghem, T.; Demeester, E.; Kellens, K. Automation and Robotics in the Cultivation of Pome Fruit: Where Do We Stand Today? J. Field Robot. 2021, 38, 513–531. [Google Scholar] [CrossRef]
- Botterill, T.; Paulin, S.; Green, R.; Williams, S.; Lin, J.; Saxton, V.; Mills, S.; Chen, X.; Corbett-Davies, S. A Robot System for Pruning Grape Vines: A Robot System for Pruning Grape Vines. J. Field Robot. 2017, 34, 1100–1122. [Google Scholar] [CrossRef]
- Karkee, M.; Adhikari, B.; Amatya, S.; Zhang, Q. Identification of Pruning Branches in Tall Spindle Apple Trees for Automated Pruning. Comput. Electron. Agric. 2014, 103, 127–135. [Google Scholar] [CrossRef]
- Jia, T. Study on the Pruning Point Locating Method of the Grapevine Winter Pruning Robot. Master’s Thesis, Zhejiang University of Technology, Hangzhou, China, 2012. [Google Scholar]
- Huang, B.; Shao, M.; Song, L. Vision Recognition and Framework Extraction of Loquat Branch-Pruning Robot. J. South China Univ. Technol. (Nat. Sci. Ed.) 2015, 43, 114–119+126. [Google Scholar]
- Liu, S.; Yao, J.; Li, H.; Qiu, C.; Liu, R. Research on a Method of Fruit Tree Pruning Based on BP Neural Network. J. Phys. Conf. Ser. 2019, 1237, 042047. [Google Scholar] [CrossRef]
- Molaei, F.; Ghatrehsamani, S. Kinematic-Based Multi-Objective Design Optimization of a Grapevine Pruning Robotic Manipulator. AgriEngineering 2022, 4, 606–625. [Google Scholar] [CrossRef]
- You, A.; Grimm, C.; Silwal, A.; Davidson, J.R. Semantics-Guided Skeletonization of Upright Fruiting Offshoot Trees for Robotic Pruning. Comput. Electron. Agric. 2022, 192, 106622. [Google Scholar] [CrossRef]
- Shi, Y.; He, P.; Hu, S.; Zhang, Z.; Geng, N.; He, D. Reconstruction Method of Tree Geometric Structures from Point Clouds Based on Angle-Constrained Space Colonization Algorithm. Trans. Chin. Soc. Agric. Mach. 2018, 49, 207–216. [Google Scholar]
- Okabe, M.; Owada, S.; Igarashi, T. Interactive Design of Botanical Trees Using Freehand Sketches and Example-Based Editing. In Proceedings of the ACM SIGGRAPH 2007 Courses. Association for Computing Machinery, New York, NY, USA, 5–9 August 2007; p. 26–es. [Google Scholar] [CrossRef]
- Qi, C.R.; Yi, L.; Su, H.; Guibas, L.J. PointNet++: Deep Hierarchical Feature Learning on Point Sets in a Metric Space. Adv. Neural Inf. Process. Syst. 2017, 30, 5099–5108. [Google Scholar]
- Shen, X.; Huang, Q.; Wang, X.; Li, J.; Xi, B. A Deep Learning-Based Method for Extracting Standing Wood Feature Parameters from Terrestrial Laser Scanning Point Clouds of Artificially Planted Forest. Remote Sens. 2022, 14, 3842. [Google Scholar] [CrossRef]
- Song, W. Walnut Tree Plastic Pruning Technology. Rural Sci. Technol. 2020, 4, 49–50. [Google Scholar] [CrossRef]
- Balan, V.; Șarban, V. The Impact of The Cherry Tree Pruning Period on The Production and Quality of Fruit in an Intensive Cultivation System. In Proceedings of the International Agriculture Congress’s (UTAK2021), Online, 16–17 December 2021; pp. 107–117. [Google Scholar]
- Rutkowski, K.; Zydlik, Z.; Pacholak, E. Effect of Tree Pruning Intensity on the Yield and Fruit Quality of the Sour Cherry. Zemdirbyste 2015, 102, 417–422. [Google Scholar] [CrossRef]
- Ma, B.; Du, J.; Wang, L.; Jiang, H.; Zhou, M. Automatic Branch Detection of Jujube Trees Based on 3D Reconstruction for Dormant Pruning Using the Deep Learning-Based Method. Comput. Electron. Agric. 2021, 190, 106484. [Google Scholar] [CrossRef]
- Borrenpohl, D.; Karkee, M. Automated Pruning Decisions in Dormant Canopies Using Instance Segmentation. In Proceedings of the 2022 ASABE Annual International Meeting, Houston, TX, USA, 17–20 July 2022; American Society of Agricultural and Biological Engineers: St. Joseph, MI, USA, 2022. [Google Scholar]
- Kolmanič, S.; Strnad, D.; Kohek, Š.; Benes, B.; Hirst, P.; Žalik, B. An Algorithm for Automatic Dormant Tree Pruning. Appl. Soft Comput. 2021, 99, 106931. [Google Scholar] [CrossRef]
- Dobbs, H.; Batchelor, O.; Green, R.; Atlas, J. Smart-Tree: Neural Medial Axis Approximation of Point Clouds for 3D Tree Skeletonization. In Proceedings of the Iberian Conference on Pattern Recognition and Image Analysis, Alicante, Spain, 7–9 June 2023; Springer: Cham, Switzerland, 2023; pp. 351–362. [Google Scholar]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Training Hyperparameters | Values |
|---|---|
| Learning Rate | 0.001 |
| Epochs | 200 |
| Batch size | 8 |
| Optimizer | Adam |
| Type of Model | Overall Accuracy | Mean Accuracy | Mean IoU |
|---|---|---|---|
| Cherry models generated by SCA | 0.85 | 0.83 | 0.75 |
| Synthetic cherry models | 0.80 | 0.77 | 0.70 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, G.; Wang, D. A Multiple Criteria Decision-Making Method Generated by the Space Colonization Algorithm for Automated Pruning Strategies of Trees. AgriEngineering 2024, 6, 539-554. https://doi.org/10.3390/agriengineering6010033
Zhao G, Wang D. A Multiple Criteria Decision-Making Method Generated by the Space Colonization Algorithm for Automated Pruning Strategies of Trees. AgriEngineering. 2024; 6(1):539-554. https://doi.org/10.3390/agriengineering6010033
Chicago/Turabian StyleZhao, Gang, and Dian Wang. 2024. "A Multiple Criteria Decision-Making Method Generated by the Space Colonization Algorithm for Automated Pruning Strategies of Trees" AgriEngineering 6, no. 1: 539-554. https://doi.org/10.3390/agriengineering6010033