1. Introduction
The introduction of new technologies usually prompts experimentation in practical contexts, and unmanned aerial vehicles (UAVs) are no exception. Currently, a number of UAV applications are known, usually including surveillance and control tasks, telecommunication tasks, etc. [
1,
2,
3,
4,
5,
6,
7,
8,
9]. In recent years, UAVs have become an important tool in agriculture [
10,
11,
12,
13,
14,
15,
16]. They are used for precise application of herbicides and fertilizers on crops [
17,
18,
19,
20], generation of high-quality digital maps of fields [
21,
22], monitoring of pasture areas, and other tasks [
23,
24,
25,
26,
27,
28,
29]. A variety of geographic, regulatory [
30], and other factors [
31,
32,
33] influence the use of UAVs. At the same time, the introduction of UAVs in agriculture should be accompanied by a thorough analysis of the technical and theoretical aspects of agricultural technology [
34,
35,
36,
37], taking into account both the degree of implementation and the areas of application [
38,
39,
40]. The importance of these studies for Russia arises from the elimination of technical services and training farms in agricultural research institutes, similar to the American Extension Service, during perestroika. These institutes played a crucial role in evaluating and formulating recommendations for scientific and technological progress [
39]. By 2010, crop rotations were not followed consistently on 75% of arable land, and fertilizer doses were reduced by a factor of 2.2 (from 88 to 38 kg/ha). In addition, the use of chemical plant protection agents (PPA) was reduced by a factor of 9. As a result, grain yields in the country remained at almost 2 t/ha, while this indicator reached the level of 7 t/ha in the UK, France and the USA [
41].
In January 2010, the Russian government adopted a plan to intensify agriculture, as outlined the Food Security Doctrine [
42]. This plan was further supported by the Long-term Strategy for the Development of the Grain Complex [
43], adopted in August 2019. The documents discuss various factors that contribute to the intensification of agriculture, such as the level of development of industrial sectors that provides agriculture with means of production and equipment; the level of development of science, technology, and production technology; the level of qualification and culture of personnel; natural and climatic conditions; soil fertility; farming; and animal husbandry culture. It is obvious that these factors play an important role in the intensification of agriculture.
The listed factors have produced tangible results. For example, the mineral fertilizer application rates increased to 60.5 kg/ha in 2017, resulting in improved soil fertility. This led to grain production of 113.3 million tons in 2018, including 72.1 million tons of wheat [
44]. According to the U.S. Department of Agriculture, Russian wheat exports totaled 43.5 million tons in March 2023, 15 million tons more than the second largest exporter, Australia. However, while Russian agriculture produces high grain yields, it still lacks advanced technology and remains extensive, according to [
40]. Based on previous research [
40], the use of extensive management techniques leads to the rapid degradation of arable land, and its removal from production. Research has shown that some farms may experience losses of up to 30%. Therefore, it may be beneficial to consider updating agricultural technologies to increase grain crop exports. The Long-term Strategy [
43] proposed by the Russian government suggests the introduction of digital technologies in agriculture as a possible solution to achieve this goal. At the initial stage, in 2017, the adoption of precision agriculture technologies was not as rapid as expected, and as a result, in 2018, only 10% of arable land was cultivated using digital systems. This can be attributed to the need to take into account the economic peculiarities of the country’s development, as well as to comply with environmental protection requirements [
44]. Assessing the likelihood of soil contamination caused by the use of highly toxic PPAs in precision agriculture technologies can be a complex matter.
In November 2023, in response to the economic situation in Russia, the Strategic Direction of Digital Transformation of Agro-industrial and Fisheries Complex [
45] was adopted. The document proposes the introduction of new means of production automation, such as robotic systems, including unmanned aerial vehicles, to increase efficiency. As is well known, these units are being used worldwide to address the problem of highly skilled rural workers migrating to cities, which is commonly referred to as urbanization. This is supported by a report from Future Market [
44], which indicates that the average annual growth rate of agro-robots in the global market is 11.2%, with an expected market value of
$40 billion by 2026.
The adopted documents provide solutions to strategic issues related to the intensification of agricultural sectors. However, actual producers face specific challenges regarding the economic efficiency of implementing digital technologies, such as UAVs, in agriculture.
This leads to the following research questions:
Is there still a need to maintain the production of large quantities of grain in Russia?
What are the strategies that can be used to not only maintain but increase grain production levels beyond 2022?
What are the unique features of improving Russian agriculture via digital transformation?
What distinguishes the use of drones for crop production in Russia?
The structure of the review was determined by the above questions.
Section 2 provides evidence for the intensification of agricultural development in the Russian Federation and assesses the potential for a significant increase in agricultural production.
Section 3 outlines the implementation of precision farming technologies in Russia, analyzing the correlation between the technology type and farm size. It also examines the specifics of ultra-low volume (ULV) spraying technology and the types of machinery used to implement ULV technology in Russia.
Section 4 assesses the regulatory framework governing the use of precision equipment in agriculture, analyzes different types of Russian agricultural producers, evaluates regulatory restrictions on the application of UAV technology, develops UAV strategies for the Russian market, and examines the economic impact of UAV use in crop production. In addition, this section includes a SWOT (Strengths, Weaknesses, Opportunities, and Threats) analysis of UAV application in crop production in Russia. To assess the effectiveness of UAVs in crop production, we will use the traditional measure of production intensification, namely the monetary cost per 1 ha (production cost). However, our comparison will be limited to the effectiveness of treating crops only with PPA.
4. Regulatory and Legal Assessment of UAVs in Russian Agriculture
In the previous section, we examined the advantages and disadvantages of UAV use in crop production and identified peculiarities in the Russian context. However, a comprehensive analysis of UAV use in other countries [
12,
13,
14] underscores the importance of considering the regulatory component of this issue. For example, in the United States, the requirement to obtain a UAV operator’s certificate has significantly limited the use of UAVs in agriculture. Based on the results presented in reference [
12], only 5% of farmers who use aircraft for crop treatment choose to use UAVs, with the majority preferring small aircraft instead.
In Russia, the regulations on the use of UAVs are more comprehensive [
83,
84,
85]. These regulations specify both the regions and permitted times for UAV use [
84], as well as the duration and time of day for treating fields with PPA [
85]. In particular, the regulations require that UAVs weighing between 0.150 kg and 30 kg be registered with state authorities within 10 days [
83,
84,
85,
86].
We now analyze the impact of regulatory restrictions on the use of UAVs in Russian agriculture.
4.1. Typology of Agricultural Producers in Russia
We begin our analysis by examining the types of farms used by potential users, particularly those that are typical of Russia. In the Soviet period, the main landowners were kolkhozes and sovkhozes, which were cooperative associations of peasants and state-owned enterprises, respectively. Both types of farms used the land for free. However, the quality of agricultural land deteriorated due to the use of extensive technologies [
87], as land users had no property rights and therefore no incentives to maintain the land. Economists predicted that the introduction of private land ownership in the late 1980s would attract more investment in agro-industrial complexes. However, the main result of the changes in the land sector in the last two decades (1990–2014) has been the full implementation of market relations. One negative effect of this process is that new landowners often fail to address negative agrarian issues, such as soil erosion, and neglect to invest in improving the fertility of agricultural land.
Since the 1991 land reform in Russia, researchers have identified three different categories of agricultural commodity producers [
39,
49]:
Agro-industrial complexes (AICs);
Private households (PHs);
Peasant (farm) households (PFHs).
These farms vary in terms of the size of the agricultural land and the material and financial resources [
39]. It is worth noting the difference between the institutional interpretation of Russian farms and the Western approach. In Russia, peasant (farm) households are engaged in commercial rather than entrepreneurial activities and are not focused on extensive reproduction. The proportions of different types of producers change over time. The dynamics of the process between 2001 and 2021 is illustrated in
Figure 2 [
49], and
Figure 3 [
49] shows the distribution of farm types in Russian regions in 2021.
According to
Figure 2 and
Figure 3, the agro-industrial complex, rather than households in the agricultural sector of the European Union [
88], is the main producer of agricultural products in Russia. Conversely, peasant (farm) households in Russia have produced only 16% of agricultural products as of 2021, compared with 80% in other countries. In addition, the agricultural sector is actively engaged in exports, accounting for nearly 60% of production, which is highly capital intensive. The production structure of agriculture in Russia from one Federal District (FD) to another, with the Central and North-Western FDs accounting for the largest share (over 70%) of the agro-industrial complex. Conversely, the Southern FD, which is characterized by a favorable climate and productive soil, has the highest percentage (24%) of peasant (farm) households. Notably, the Far Eastern FD has the largest share (50%) of private households.
Thus, the composition of agricultural enterprises in Russia varies in terms of size, territorial extent, and weather conditions.
4.2. Legal Restrictions on the Technical Use of UAVs
The most recent government decree in Russia [
86] imposes two types of restrictions on the use of UAVs: general restrictions, which apply to all flights, and specific restrictions, which dictate how PPA should be applied to fields.
General restrictions include the following.
UAV flights are only permitted in certain regions. Specifically, flights are permitted or may be permitted with government approval for specific civilian missions in the territories of the Republic of Tatarstan, the Altai and Stavropol Krai, Astrakhan, Volgograd, Voronezh, Lipetsk, Nizhny Novgorod, Novosibirsk, Saratov, Tambov, and Ulyanovsk regions.
Figure 4 shows the geographical location of the regions. The analysis of
Figure 3 and
Figure 4 shows that these regions have a higher percentage of private households when compared to other regions;
UAVs should be authorized to operate within the experimental legal framework and must bear state, registration, and civil aircraft registration marks in the Russian Federation;
An external pilot of a UAV should have a temporary certificate as an external pilot of an agricultural unmanned aerial system obtained within an experimental legal framework and practical training in piloting. This training shall include, among other essential skills, the development of flight plans and the assessment of relevant meteorological and aeronautical conditions in the working area;
The operator of the experimental legal framework is appointed by the designated governing body and is authorized to maintain a record of participants in the framework;
There are restrictions on the scope of UAV operations. The use of digital technology-based UAVs is permitted for PPA application via aerial chemical operations;
Restrictions apply to the flight path and flight plan of UAVs. The flight plan must comply with permitted overflight locations and be uploaded to the flight controller. UAVs may only be flown under the direct control of an external pilot, and automatic flight mode may only be used in emergency scenarios where the control line communication is lost;
There are limitations on flight parameters, including a maximum true altitude ceiling of 15 m above the ground surface and a maximum ground speed of 16 m per second, which is equivalent to 57.6 km per hour;
Flight operations are subject to certain restrictions. These include operating only within visual contact and a minimum distance of 5 km from airfield control points and 2 km from landing zones. It is also prohibited to fly over infrastructure elements such as highways, open trench pipelines, gas supply facilities, production sites, and power lines;
A collision avoidance system must be installed to maintain a minimum distance of 2 m from obstacles when flying at maximum horizontal speed. In addition, when coming to a complete stop, the system should ensure that the UAV hovers at the stop altitude until externally instructed by the pilot;
There are restrictions on the radio frequencies used by the radio-electronic elements integrated into the UAV.
Specific restrictions apply to
Consumption rates of the PPA active ingredient and the number of treatments performed;
Flight parameters during PPA field treatments. When applying PPA, UAV speeds should not exceed 25 km/h with a maximum wind speed of 14.4 km/h. Flight altitude should also remain below 2 m above the treated crop surface;
PPA spraying equipment.
When treating crops with PPA, it is important to follow the guidelines of the Work Safety Regulations, which is the Russian analog of the Occupational Health and Safety Regulations [
86]. These guidelines limit the daily working hours to a maximum of six hours and recommend working during the coolest hours of the morning and evening in hot seasons with wind speeds below 10.6 km/h. Aerosol treatments, including ULV treatments, should be performed at times when there is no natural light, such as in the evening, at night, or before sunrise.
A comparison between the listed regulatory requirements and the UAV operating modes discussed in
Section 3 suggests that the implementation of optimal operating modes for UAVs is not hindered.
4.3. Adapting UAV Strategies to the Russian Market
According to research, the cost of unmanned aerial vehicles (UAVs) in Russian conditions is comparatively high due to specialized software. DroneDeploy [
71], a well-known UAV software provider, offers access to the most comprehensive data repository of information collected by UAVs worldwide. Its mobile application enables automatic mapping and photography of DJI-branded UAV flights. The operation of unmanned aerial vehicles (UAVs) requires technical expertise in a variety of fields, including agronomy, aerodynamics, engineering, and legal regulations. Due to the limited availability of qualified professionals in these fields and the diversity of households using UAVs, several operational models have been created and are outlined in
Table 11 [
72].
Currently, the number of companies offering such services is limited to a list provided in [
85] due to regulatory implications. The listed companies include BAS Consortium, AGRIMAX.AERO, INDUSTRIAL DRONES, Aeromax-Avia (South) and others.
The regions discussed in
Section 4.2 preclude the standardization of specialized UAV software due to their different climatic zones and soil potential. Therefore, it is necessary to develop software for each type of terrain, taking into account the specific characteristics of the region’s climate.
4.4. Economic Impact of UAVs in Crop Production
We now analyze the economic aspects of using UAVs for crop production in the Russian environment.
According to the analysis of the Russian literature [
70,
89,
90,
91,
92], it has been observed that traditional land-based and airborne equipment for pesticide and fertilizer application is superior to UAVs in terms of performance. In addition, the direct operating costs of traditional equipment are significantly lower. When comparing the final results of drones and conventional sprayers, it is important to consider additional factors such as economic feasibility, plant stress, seed characteristics of the crop, and the percentage of disease and pest development [
91]. These factors highlight the need for further research into the implementation of digital technologies in crop production.
The following sections aim to provide further explanation of the above comments, using the examples presented in [
71,
89,
90,
91,
92].
4.4.1. Higher Operating Costs
According to
Table 12 in [
90], a comparison was made between conventional technology using a tractor and digital technology using a UAV for the cultivation of three cultivars of winter barley (Carrera, Versailles, and Agricultural) on thirteen 9 m × 4 m plots. The plots were flat and without any structures. According to
Table 13 in [
90], the cost estimates for the individual operations of barley cultivation, as well as the equipment used, are given. It should be noted that the field was preceded by winter rape.
The plants were subjected to differential treatment, and their status was evaluated using a UAV Phantom 4 Pro equipped with RGB cameras to generate a Normalized Difference Vegetation Index (NDVI) map. Harvesting was done with a TERRION 2010 combine harvester at predetermined dates. The yields of the cultivars Agricultural, Versailles, and Carrera were 11.4 t/ha, 11.0 t/ha, and 11.7 t/ha, respectively, with an average fertilizer dose of 100 kg/ha. According to the study in [
90], the cultivar Versailles had an increase of 8.9% and the cultivar Carrera had an increase of 6.4% when using UAVs and the differentiated treatment. However, the cultivar Agricultural had a decrease of 1.8%.
Based on the findings of [
90], it is more cost-effective to use ground equipment rather than farmer-owned UAVs for flat, level small area plots without buildings. The results of the experiment support this conclusion, showing an average yield increase of 3.6% with a 2% reduction in the amount of fertilizer required, at an additional investment of RUB 5159.91 thousand. Renting UAVs from specialized companies is a viable option for using them without incurring additional capital investment. This approach has already been successfully implemented on small farms in China [
93].
4.4.2. Incorrect Type of PPA When Using UAVs
In [
91], a comparison of similar technologies is presented, including a case study of incorrect PPA selection for UAV use. The case study uses the soybean cultivar Bingo as an example.
The following products were used as PPA at different stages of growth:
Hermes MD (2 L/ha) and Kupazh VDG (0.008 L/ha) were applied at the weed germination and 1–3 leaf emergence stages;
Geyser KKR (2 L/ha) and Kupazh VDG (0.008 L/ha) were applied at the 2–6 leaf emergence stage;
Kinfos KE (0.4 L/ha) was applied in the 3–7 triple leaf phase of the crop;
Vintage ME (1 L/ha) and Kinfos KE (0.4 L/ha) were applied from budding to the beginning of flowering;
up to 10–20% Ultramag Potassium (3 L/ha) was applied at the stage of bean browning;
Tongara BP (2 L/ha) was applied 7–10 days before harvest when 50–70% of the beans were browned.
Application rates were 4.5–10 L/ha when UAVs were used and 300 L/ha when ground machinery was used.
Table 14 of [
91] provides a comparative analysis of grain biochemical composition and soybean yield for the different treatments.
Based on the analysis of the data in
Table 14, the authors conclude that despite the 440 kg/ha increase in soybean yield when the UAV was used, an increase in seed moisture and a decrease in the percentage of protein content in the seed were observed. The authors [
89] suggest that the incorrect choice of a contact-type pesticide resulted in a low working fluid flow during UAV spraying, which may have prevented the pesticide from penetrating deep into the crop.
To overcome this problem, we believe it is recommended to reduce the UAV flight altitude, which should increase the PPA flow rate. This approach is demonstrated in the description of the vertical spray mode for corn crop treatment in
Section 3.3.
4.4.3. Economic Efficiency of UAV Application Influenced by Land Use Coefficient
In our opinion, a more objective approach to evaluate the economic efficiency of UAV application in crop production is presented in [
89]. The proposed method evaluates the economic efficiency based on the degree of land use, which is estimated by the Land Use Coefficient (LUC)
where F
N represents the area of crops specifically dedicated to crops, while F
T includes the total area of the plot, including roads, structures, and buildings.
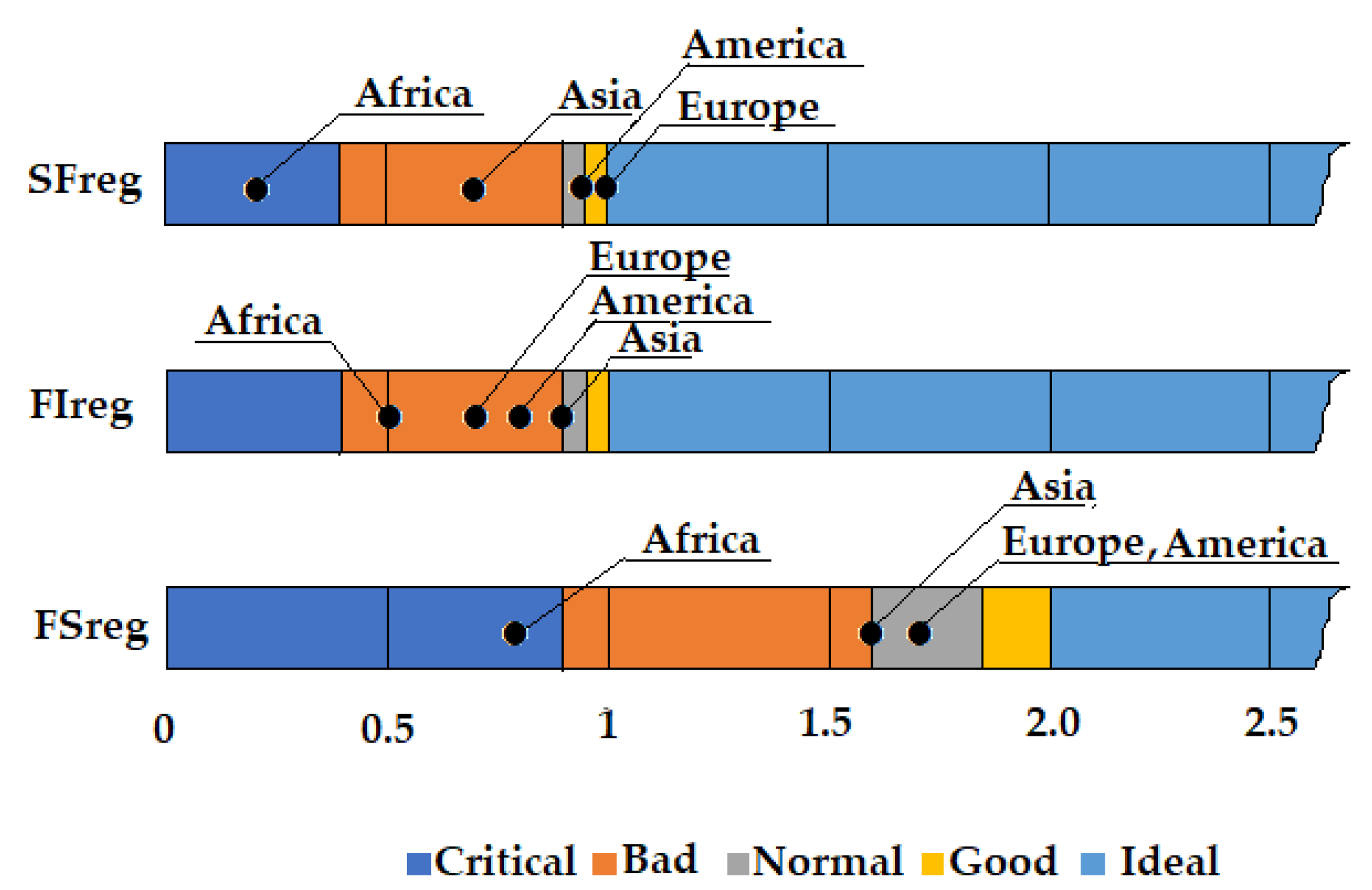
According to [
89], there is a correlation between the cost of PPA treatment for rice and the LUC at which the use of UAVs for treatment becomes economically viable compared to ULVs.
Figure 5a illustrates this relationship using data from [
89], while
Figure 5b clarifies the concept of critical LUC.
For
Figure 5b, it is assumed that the treatment cost for small aircraft use is 350 RUB/ha with a PPA application rate of 50–100 L/ha. For UAV use, the treatment cost is assumed to be 1100 RUB/ha with a PPA application rate of 5–10 L/ha. The cost of 1 L of herbicide is RUB 11,014. It is assumed that in both cases, the equipment is rented from a specialized company. The investment for the purchase of the equipment is included in the cost of crop treatment.
According to the analysis of
Figure 5b, the use of UAVs for rice treatment is cost-effective compared to ULV only when the LUC value is below a certain critical value. This critical value corresponds to the point of intersection of the linear cost relationships for ULV and UAV application. The critical LUC value at which UAV use becomes economically inefficient depends on the cost of PPA treatment per hectare, as shown in
Figure 5a.
Therefore, it can be concluded that the use of UAVs can be economically advantageous in areas with uneven terrain or inarable land, provided that the percentage of inarable land is around 17% or more, depending on the treatment cost. This conclusion is supported by the results presented in [
10] regarding the use of UAVs in China. The study shows that UAVs are particularly effective in cultivating crop edges near roads, ravines, or technical buildings. This is supported by reference [
93], which also confirms the effectiveness of UAVs in cultivating fields in mountainous areas.
4.4.4. Influence of the Length of the Treated Area and the Flight Characteristics of the UAV on the Cost of Using UAVs for Treatment
The cost of treating crops with agrochemicals, such as pesticides and mineral fertilizers, using UAVs is influenced by the technical characteristics of the flight. As shown in
Section 3, the flight speed and altitude of the UAV affect the fluid flow.
Figure 6 from [
92] illustrates the dependence of UAV application costs on these technical characteristics.
The relationships shown in
Figure 6 are based on the assumption that the UAV carries a 100 kg payload. The working fluids are filled at a distance of 0.2 km from the treatment area. The agrochemical application rates refer to pesticides (10–20 L/ha) and nitrogen fertilizers (30–100 L/ha). Analysis of the data presented in
Figure 6a shows that increasing the UAV flight speed from 30 km/h to 60 km/h reduces the cost of agrochemical treatment. The decrease in spray rate is a result of the decrease in surface coverage as shown in
Section 3 (
Table 9 and
Table 10). The number of fluid refills is affected by the length of the rut and the rate of agrochemical consumption, which is limited by the size of the UAV tank. Therefore, increasing the length of the UAV route also increases the cost of treatment. In addition, the analysis of
Figure 6b shows a lower limit for the field length, which is 200 m. As stated in the paper [
93], the site area must be larger than 2 hectares.
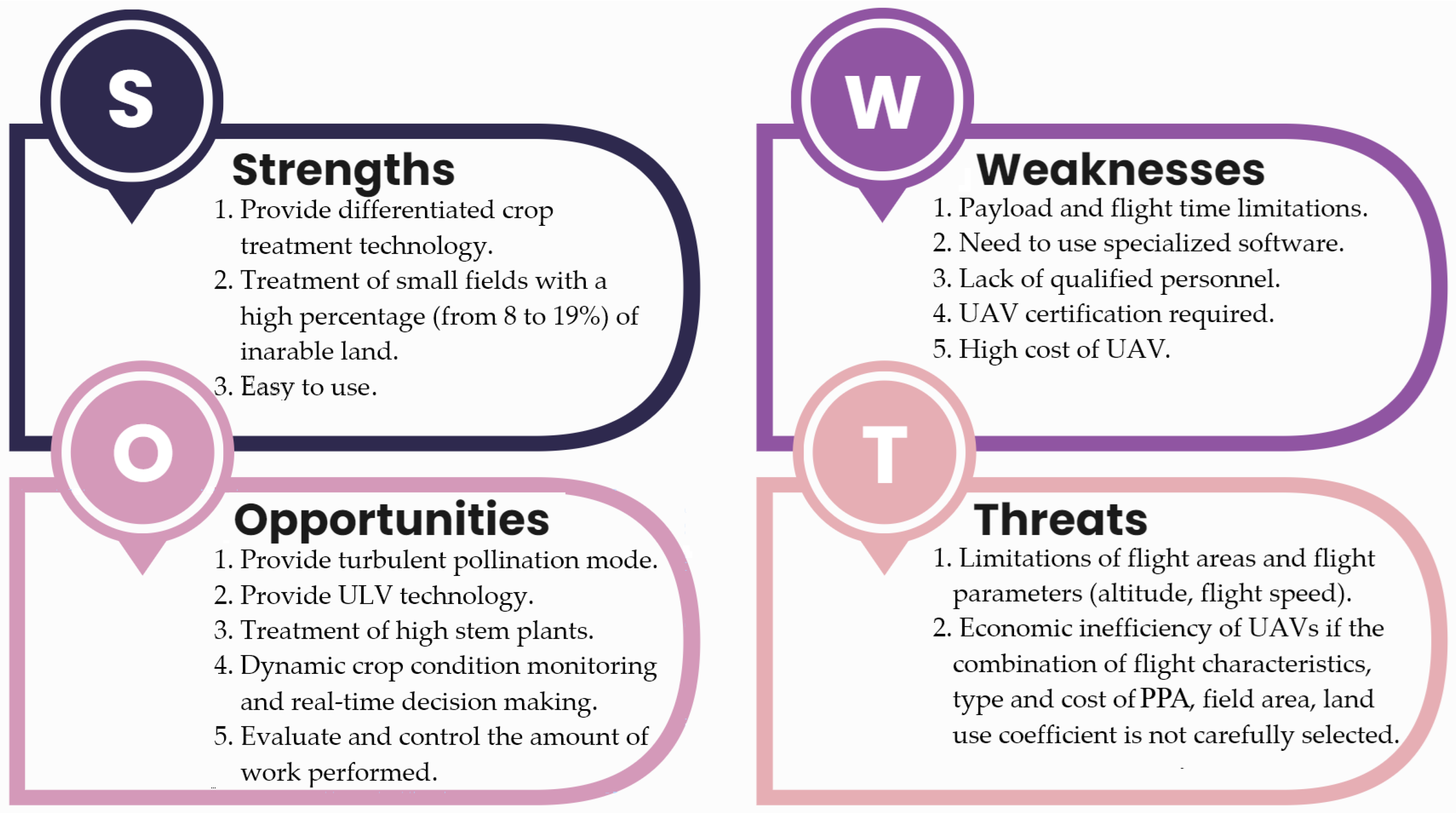
4.5. SWOT Analysis of the Use of UAVs in Crop Production in Russia
The above results show that the use of UAVs in crop production in Russia has brought about changes in the economic, legal, agrarian, technical, and technological spheres. Therefore, it is recommended to conduct a SWOT analysis. Ref. [
94] explains that SWOT analysis is a strategic planning and management technique used to identify and analyze internal strengths and weaknesses, as well as external opportunities and threats that shape current and future operations, and to aid in the development of strategic goals. The SWOT matrix is commonly used in business competition or project planning. The analysis helps individuals and organizations make informed decisions by evaluating internal and external factors that may affect their goals. It is also referred to as a situational assessment or analysis.
Let us summarize the results of the analysis of the current state of UAV implementation in Russian agriculture using the SWOT method, as shown in the example [
95].
Figure 7 shows the results of the SWOT analysis of the use of UAVs in Russian crop production for field treatment with PPA and application of fertilizers.
Thus, the information presented in
Figure 7 provides an answer to the final question posed in the Introduction section.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}