
BoucaNet: A CNN-Transformer for Smoke Recognition on Remote Sensing Satellite Images


Abstract
:1. Introduction
- A novel DL method, BoucaNet, is introduced to detect the presence of smoke in satellite images, thereby improving the performance of DL-based smoke classification methods.
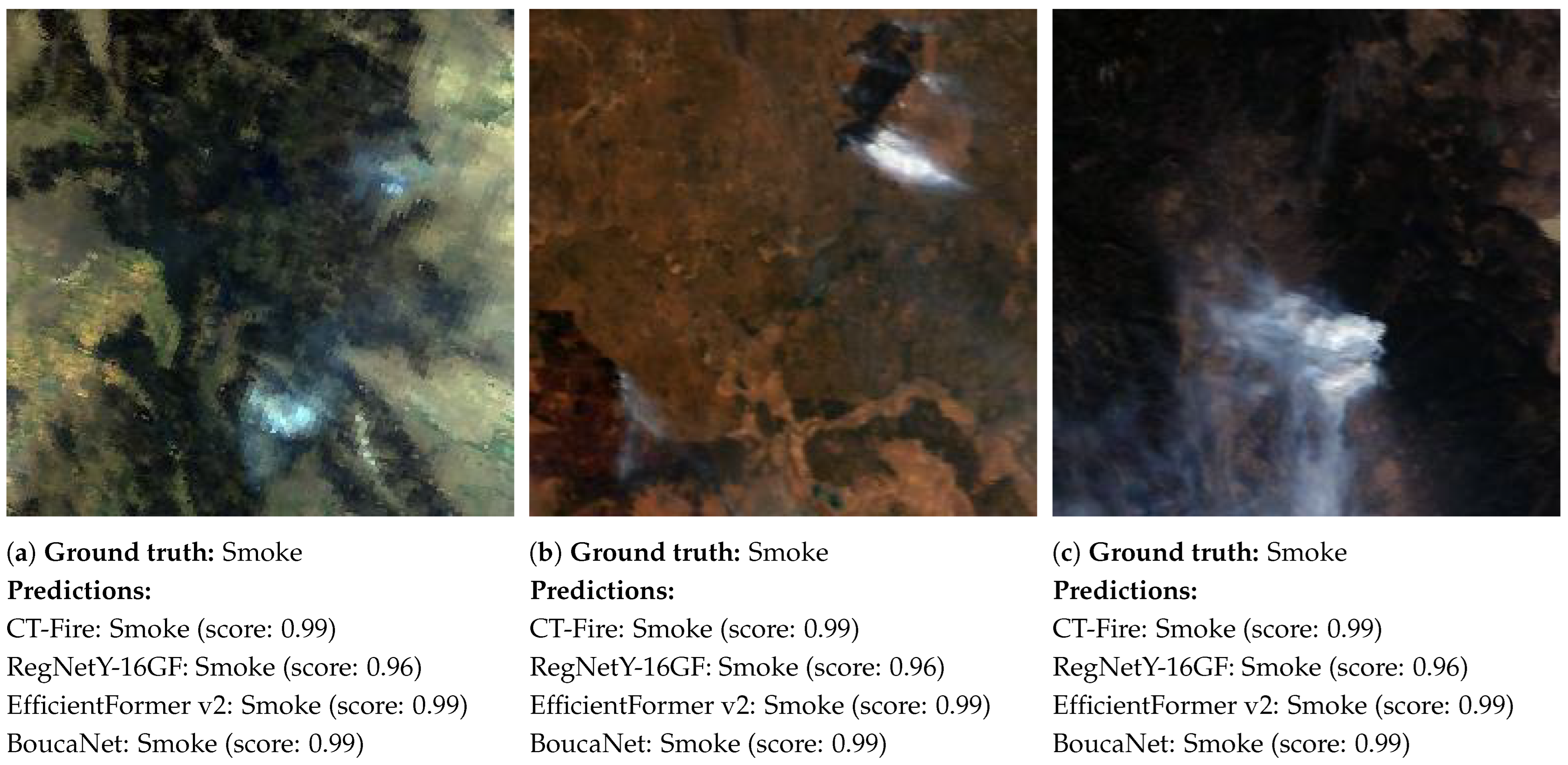
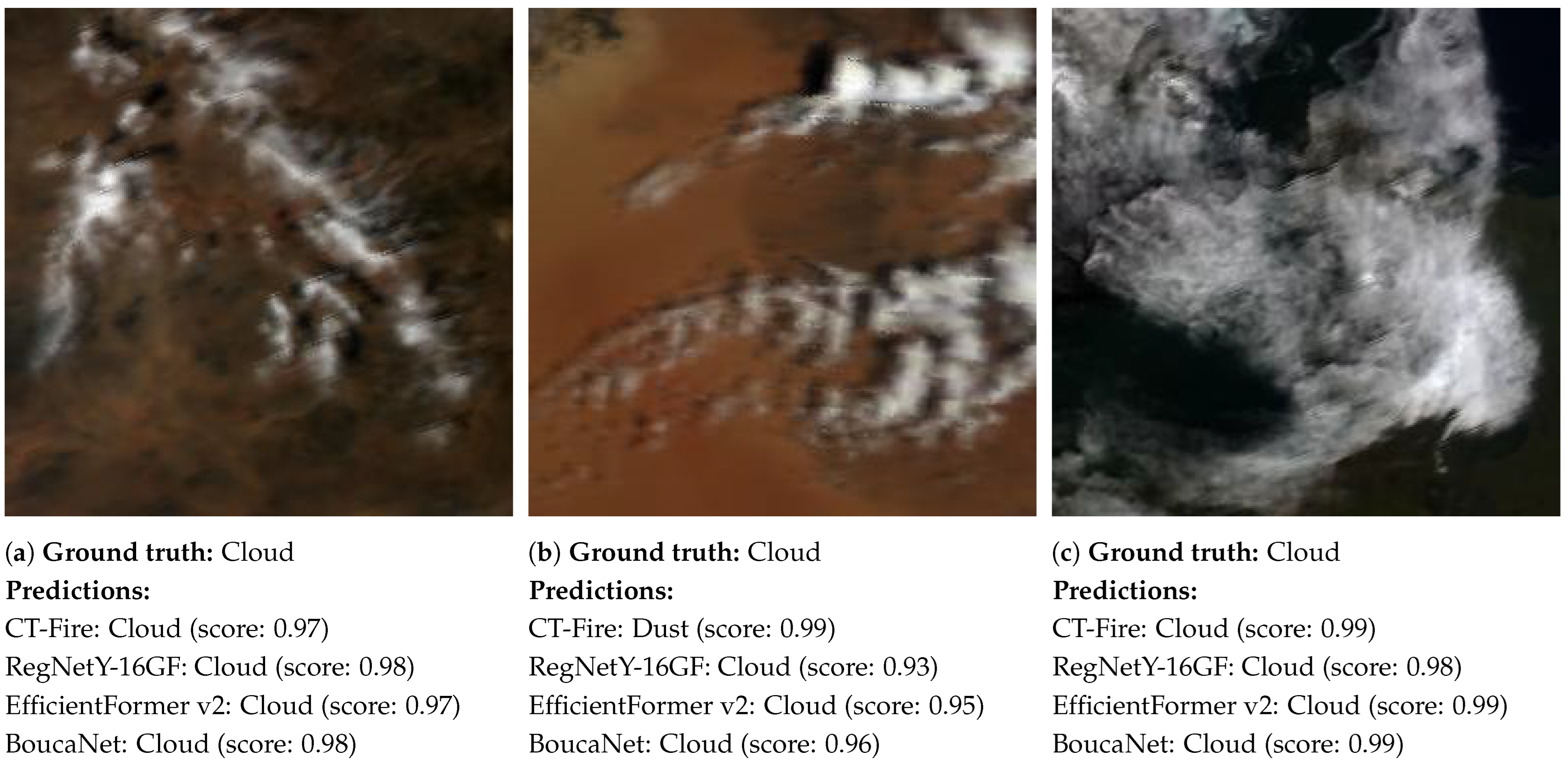
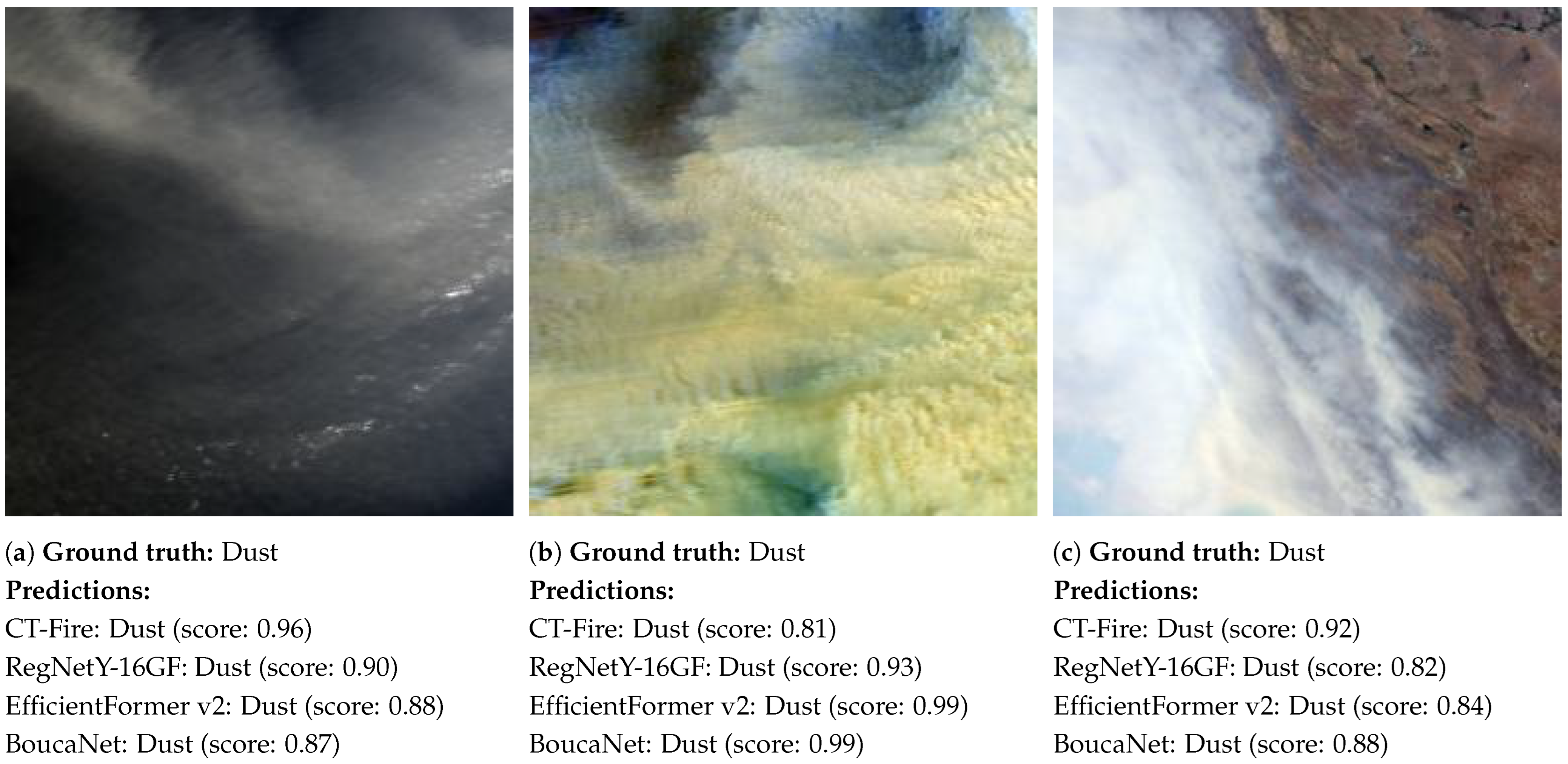
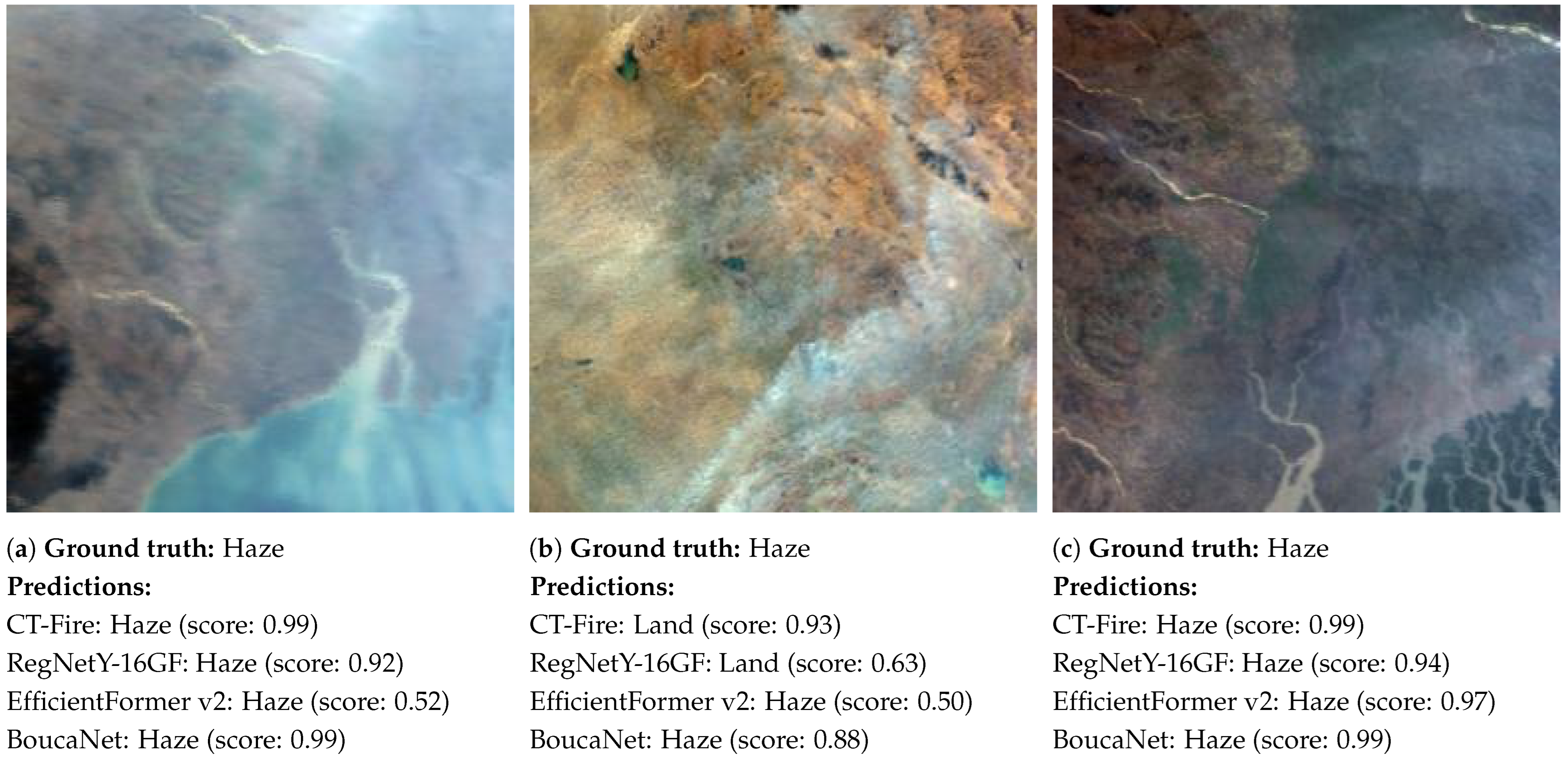
- BoucaNet demonstrated a robust ability to handle challenging situations such as background complexity and dynamism; detecting small smoke areas; varying characteristics of smoke regarding its air concentration, flow pattern, intensity, shape, and color; and handling its visual similarity to haze, dust, and clouds. This ability reduces false alarms, making BoucaNet a reliable solution for smoke remote sensing applications with high accuracy.
- An optimized architecture is proposed in this study, achieving fast inference time, which is an important aspect in developing an early smoke-detection system.
2. Related Works

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Ref. | Methodology | Object Detected | Dataset | Image Type | Results (%) |
|---|---|---|---|---|---|
| [41] | VGG-16 | Smoke/Flame | FLAME2: 53,451 images | Aerial | Accuracy = 99.91 |
| [39] | InceptionResNet v2 | Smoke/Flame | Private: 1102 fire images and 1102 smoke images | Aerial Ground | Accuracy = 99.90 |
| [15] | Modified AlexNet | Smoke | Yuan dataset: 5695 smoke images and 18,522 non-smoke images | Ground | Accuracy = 96.88 |
| [18] | DNCNN | Smoke | Yuan dataset: 5695 smoke images and 18,522 non-smoke images | Ground | Accuracy = 98.08 |
| [21] | VGG-16 | Smoke | Private: 18,532 smoke images, 17,474 non-smoke images, 17,474 non-smoke images with fog, and 18,532 smoke images with fog | Ground | Accuracy = 97.72 |
| [23] | GMM and SqueezeNet | Smoke | Private: 25,000 smoke images and 25,000 non-smoke images | Ground | Accuracy = 97.12 |
| [29] | DCNN | Smoke | Yuan dataset: 5695 smoke images and 18,522 non-smoke images | Ground | Accuracy = 99.50 |
| [30] | DC-CNN | Smoke | Private: 9794 smoke and 9794 non-smoke images | Ground | Accuracy = 99.33 |
| [31] | GMM and ResNet50 | Smoke | VisiFire: 138 smoke video and PascalVoc2012: 17,708 images | Ground | F1-score = 99.32 |
| [33] | VGG-16 and attention module | Smoke | Private: 33,666 images (560 videos): 8342 smoke images, 8522 smoke with fog images, 8401 non-smoke images, and 8401 non-smoke with fog images | Ground | F1-score = 99.97 |
| [34] | CNN with attention | Smoke | Private: 116 fire videos and 89 non-fire videos | Ground | Accuracy = 96.80 |
| [35] | PACNN | Smoke | Yuan dataset: 5695 smoke images and 18,522 non-smoke images | Ground | Accuracy = 98.91 |
| [36] | AFSNet | Smoke | RSet: 29,480 images (14,100 smoke images and 15,380 non-smoke images) RISE: 12,567 videos | Ground | F1-score = 96.57 F1-score = 91.00 |
| [37] | CViTNet | Smoke | Yuan dataset: 5695 smoke images and 18,522 non-smoke images | Ground | Accuracy = 99.20 |
| [43] | E-FireNet | Flame | SV-Fire dataset: 1500 images | Ground | Accuracy = 98.00 |
| [44] | Modified YOLO v5 | Flame | Private: 723 building fire images, 118 indoor electric fire images, and 1116 vehicle fire images | Ground | F1-score = 84.00 |
| [45] | CNN based on Inception v3 | Smoke/Flame | Private: 534 images (239 fire images and 295 no-fire images) | Satellite | Accuracy = 98.00 |
| [14] | SmokeNet | Smoke | USTC_SmokeRS: 6225 satellite images | Satellite | Accuracy = 92.75 |
3. Materials and Methods
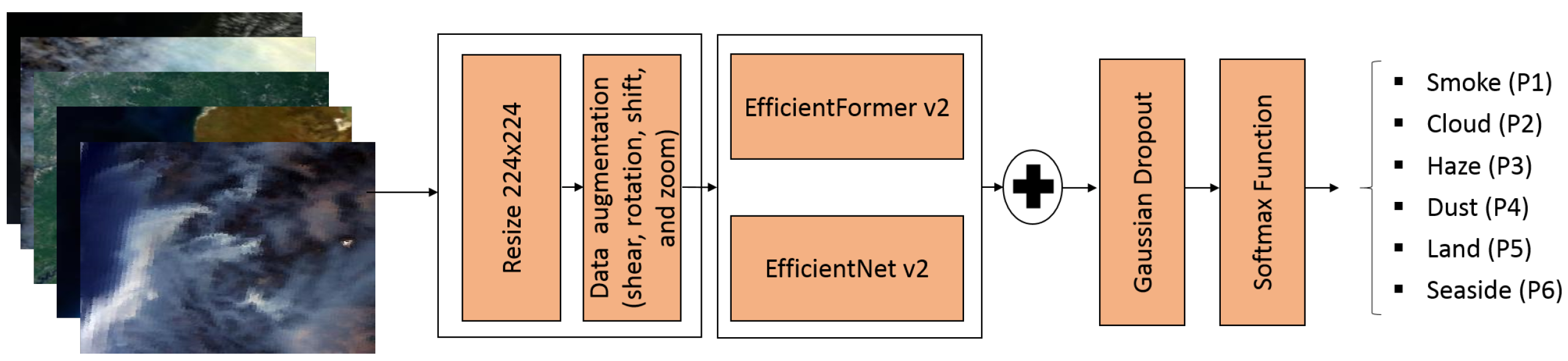
3.1. Proposed Method for Smoke Classification
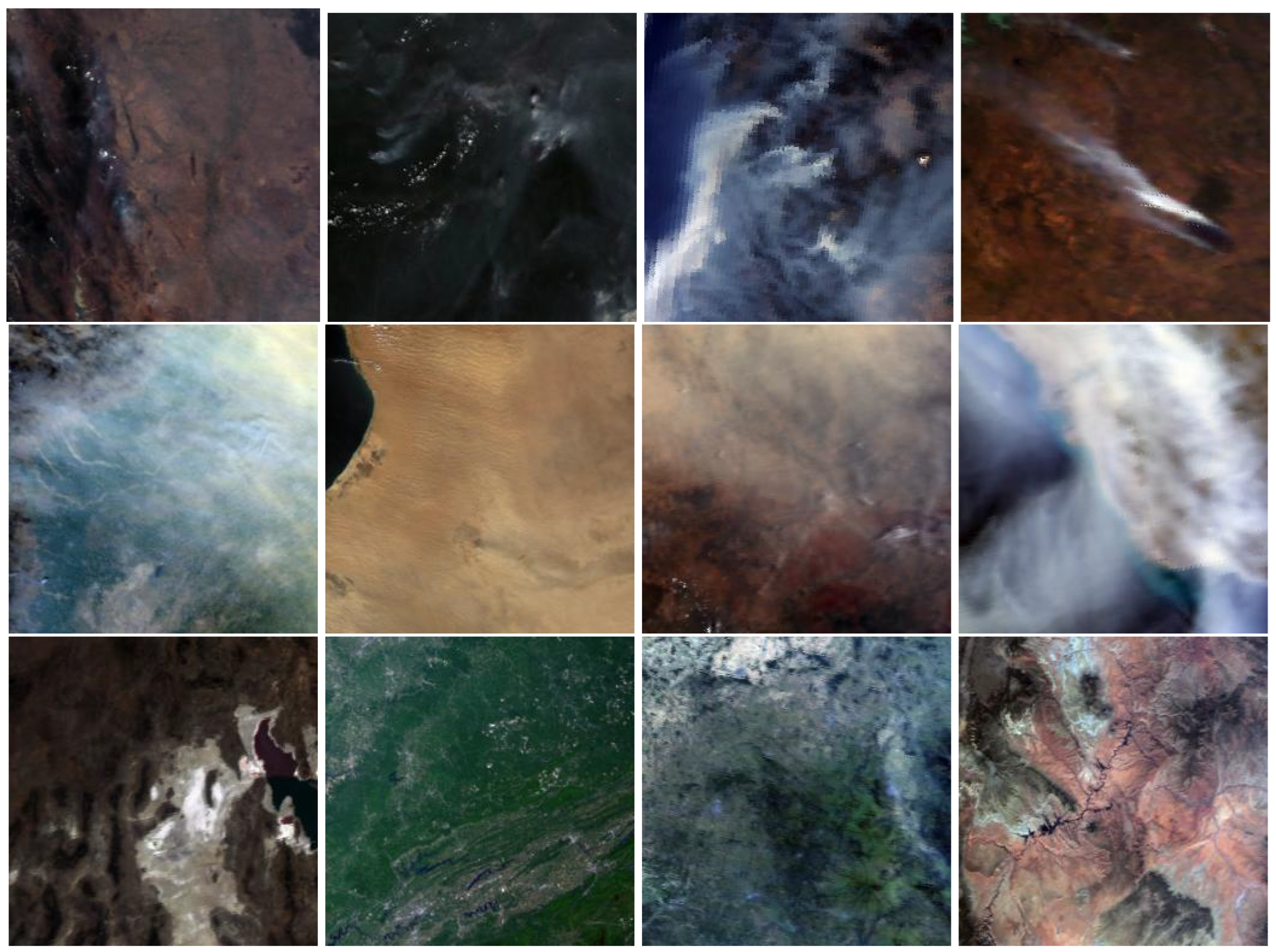
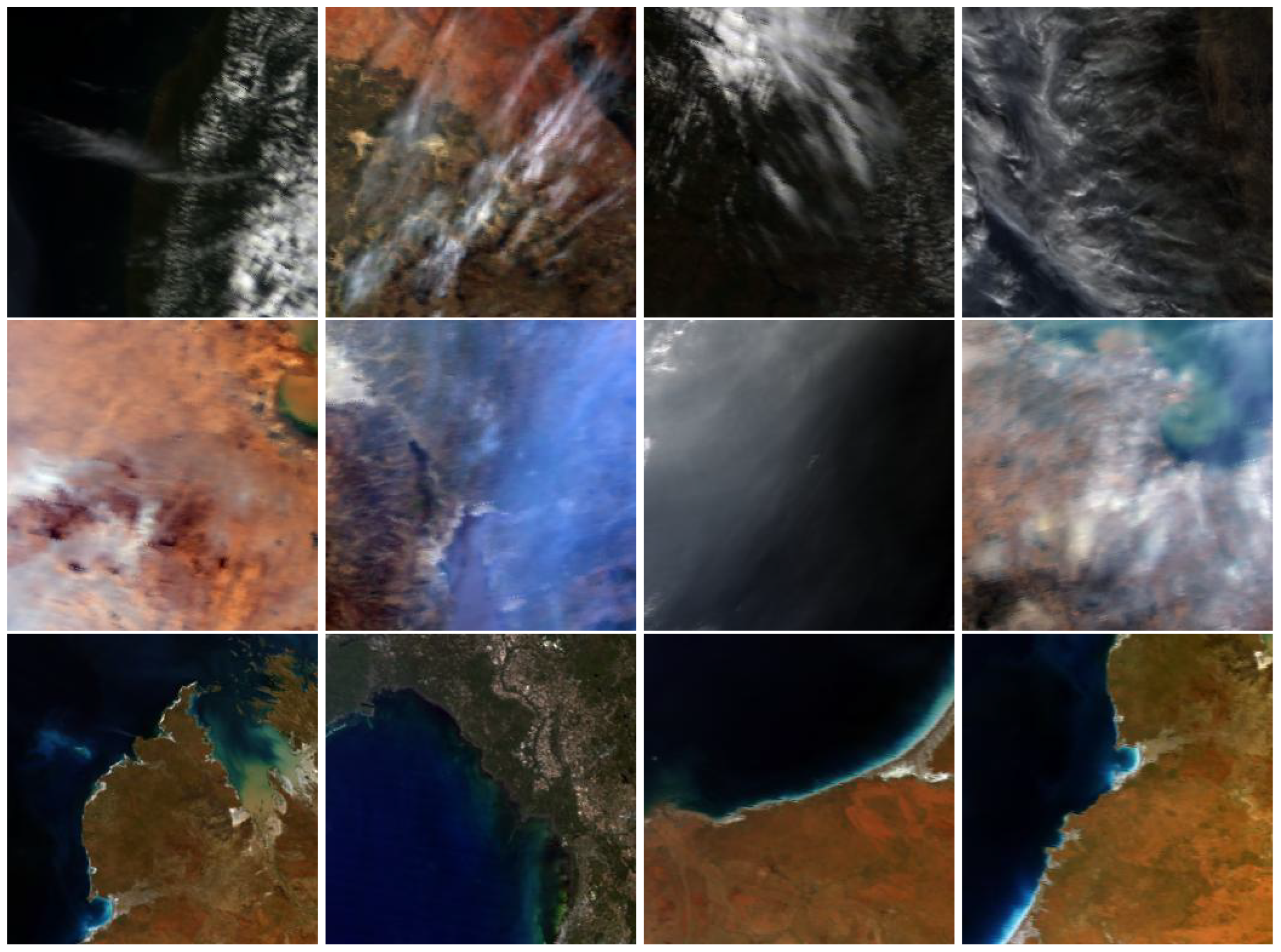
3.2. Datasets
- Smoke (1016 satellite images) as the target class for wildfire detection.
- Dust (1009 satellite images) and haze (1002 satellite images) as negative classes to smoke, which share similar features (texture and spectral) with smoke.
- Cloud (1164 satellite images) as the most common class in satellite images, with similar color, shape, and spectral characteristics to smoke.
- Land (1027 satellite images) and seaside (1007 satellite images) as background classes for fire smoke scenes.
3.3. Evaluation Metrics
- Accuracy is the proportion of accurate predictions relative to the total number of predictions, as shown in Equation (1).
- F1-score integrates precision and recall metrics to calculate the performance of the proposed model, as presented in Equation (2).
- The inference time is the average time taken by BoucaNet to identify and recognize the presence of smoke in an input satellite image during the test step.
4. Results and Discussion
- Training set: a total of 4181 images were used, including 782, 678, 673, 690, 676, and 682 satellite images for the cloud, dust, haze, land, seaside, and smoke classes, respectively.
- Validation set: a total of 796 images were utilized, including 149 images for cloud, 129 images for dust, 128 images for haze, 131 images for land, 129 images for seaside, and 130 images for smoke.
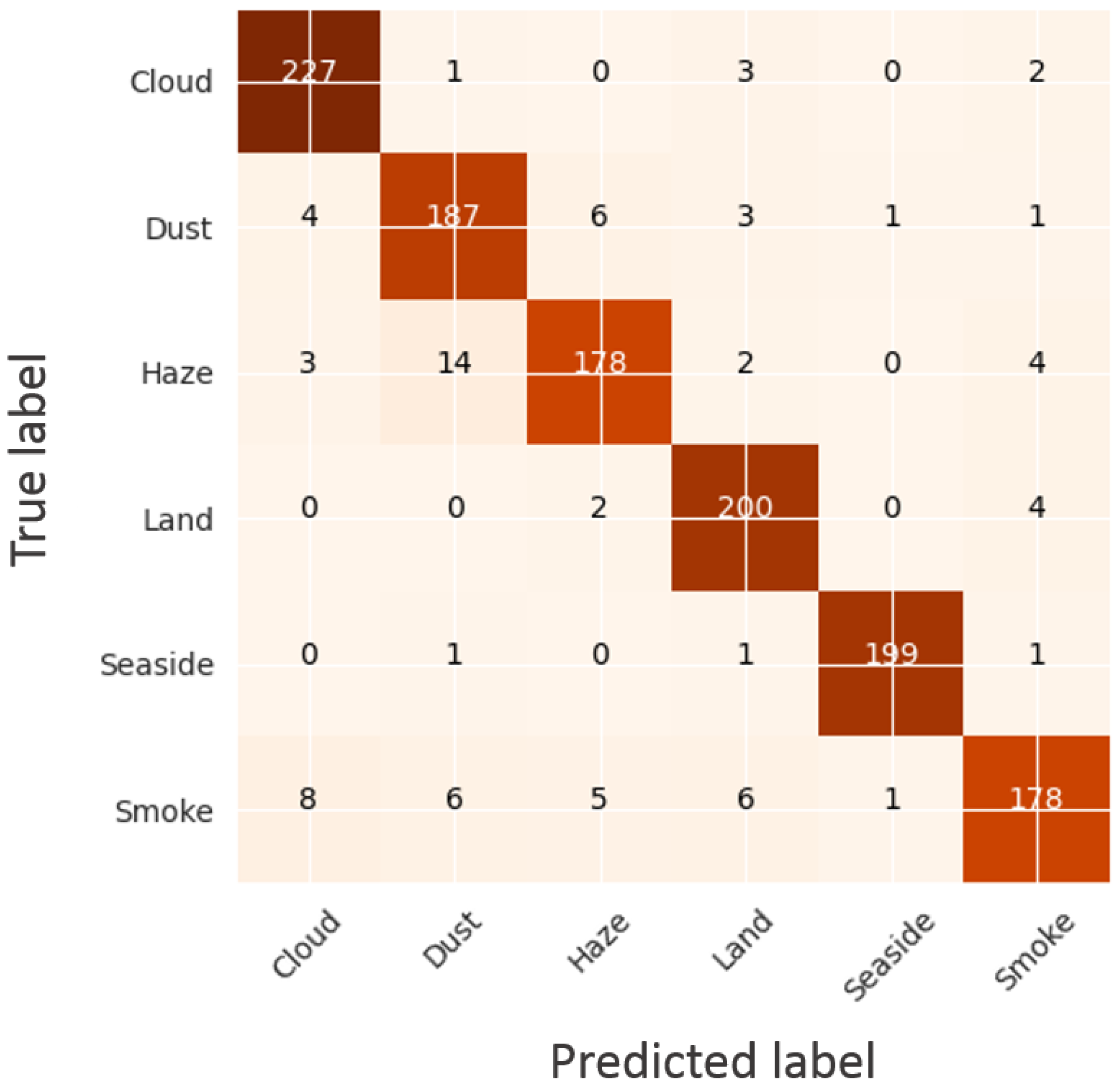
- Testing set: a total of 1248 images were selected for evaluation. This test set is composed of 233 images for cloud, 202 images for dust, 201 images haze, 206 images for land, 202 images for seaside, and 204 images for smoke.
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| DL | Deep Learning. |
| SVM | Support Vector Machine. |
| CNN | Convolutional Neural Network. |
| GMM | Gaussian Mixture Model. |
| RM | Recognition Module. |
| AFSM | Adaptative Frame Selection Module. |
| FEM | Feature Extraction Module. |
| SBNN | Selective-based Batch Normalization Network. |
| SCNN | Skip Connection-based Neural Network. |
| CViTNet | Convolution-enhanced Vision Transformer Network. |
| DC-CNN | Dual-Channel Convolutional Neural Network. |
| PAAModule | Pixel Aware Attention Module. |
| MODIS | Moderate Resolution Imaging Spectroradiometer. |
References
- Government of Canada. Forest Fires. 2023. Available online: https://natural-resources.canada.ca/our-natural-resources/forests/wildland-fires-insects-disturbances/forest-fires/13143 (accessed on 30 September 2023).
- European Commission. Wildfires in the Mediterranean. 2023. Available online: https://joint-research-centre.ec.europa.eu/jrc-news-and-updates/wildfires-mediterranean-monitoring-impact-helping-response-2023-07-28_en (accessed on 30 September 2023).
- Ghali, R.; Akhloufi, M.A. Wildfires Detection and Segmentation Using Deep CNNs and Vision Transformers. In Proceedings of the Pattern Recognition, Computer Vision, and Image Processing, ICPR 2022 International Workshops and Challenges, Montreal, QC, Canada, 21–25 August 2022; pp. 222–232. [Google Scholar]
- Ghali, R.; Akhloufi, M.A. Deep Learning Approaches for Wildland Fires Remote Sensing: Classification, Detection, and Segmentation. Remote Sens. 2023, 15, 1821. [Google Scholar] [CrossRef]
- Chaturvedi, S.; Khanna, P.; Ojha, A. A Survey on Vision-based Outdoor Smoke Detection Techniques for Environmental Safety. ISPRS J. Photogramm. Remote Sens. 2022, 185, 158–187. [Google Scholar] [CrossRef]
- Madhavi, K.R.; Kora, P.; Reddy, L.V.; Avanija, J.; Soujanya, K.; Telagarapu, P. Cardiac Arrhythmia Detection Using Dual-tree Wavelet Transform and Convolutional Neural Network. Soft Comput. 2022, 26, 3561–3571. [Google Scholar] [CrossRef]
- Skandha, S.; Saba, L.; Gupta, S.K.; Kumar, V.K.; Johri, A.M.; Khanna, N.N.; Mavrogeni, S.; Laird, J.R.; Pareek, G.; Sfikakis, P.P.; et al. Magnetic Resonance Based Wilson’s Disease Tissue Characterization in an Artificial Intelligence Framework Using Transfer Learning. In Multimodality Imaging, Volume 1; IOP Publishing: Bristol, UK, 2022; pp. 5–22. [Google Scholar] [CrossRef]
- Ghali, R.; Akhloufi, M.A.; Jmal, M.; Mseddi, W.S.; Attia, R. Forest Fires Segmentation using Deep Convolutional Neural Networks. In Proceedings of the IEEE International Conference on Systems, Man, and Cybernetics (SMC), Melbourne, QSD, Australia, 17–20 October 2021; pp. 2109–2114. [Google Scholar]
- Ghali, R.; Akhloufi, M.A.; Souidene Mseddi, W.; Jmal, M. Wildfire Segmentation Using Deep-RegSeg Semantic Segmentation Architecture. In Proceedings of the 19th International Conference on Content-Based Multimedia Indexing, Graz, Austria, 14–16 September 2022; pp. 149–154. [Google Scholar]
- Ghali, R.; Akhloufi, M.A. Deep Learning Approaches for Wildland Fires Using Satellite Remote Sensing Data: Detection, Mapping, and Prediction. Fire 2023, 6, 192. [Google Scholar] [CrossRef]
- Xie, Z.; Song, W.; Ba, R.; Li, X.; Xia, L. A Spatiotemporal Contextual Model for Forest Fire Detection Using Himawari-8 Satellite Data. Remote Sens. 2018, 10, 1992. [Google Scholar] [CrossRef]
- Li, Y.; Hu, J.; Wen, Y.; Evangelidis, G.; Salahi, K.; Wang, Y.; Tulyakov, S.; Ren, J. Rethinking Vision Transformers for MobileNet Size and Speed. arXiv 2022, arXiv:2212.08059. [Google Scholar]
- Tan, M.; Le, Q. EfficientNetV2: Smaller Models and Faster Training. In Proceedings of the 38th International Conference on Machine Learning, Virtual event. 18–24 July 2021; pp. 10096–10106. [Google Scholar]
- Ba, R.; Chen, C.; Yuan, J.; Song, W.; Lo, S. SmokeNet: Satellite Smoke Scene Detection Using Convolutional Neural Network with Spatial and Channel-Wise Attention. Remote Sens. 2019, 11, 1702. [Google Scholar] [CrossRef]
- Tao, C.; Zhang, J.; Wang, P. Smoke Detection Based on Deep Convolutional Neural Networks. In Proceedings of the International Conference on Industrial Informatics—Computing Technology, Intelligent Technology, Industrial Information Integration (ICIICII), Wuhan, China, 3–4 December 2016; pp. 150–153. [Google Scholar]
- Krizhevsky, A.; Sutskever, I.; Hinton, G.E. ImageNet Classification with Deep Convolutional Neural Networks. In Proceedings of the Advances in Neural Information Processing Systems (NIPS), Lake Tahoe, NV, USA, 3–6 December 2012; pp. 1097–1105. [Google Scholar]
- Yuan, F. Video-based Smoke Detection with Histogram Sequence of LBP and LBPV Pyramids. Fire Saf. J. 2011, 46, 132–139. [Google Scholar] [CrossRef]
- Yin, Z.; Wan, B.; Yuan, F.; Xia, X.; Shi, J. A Deep Normalization and Convolutional Neural Network for Image Smoke Detection. IEEE Access 2017, 5, 18429–18438. [Google Scholar] [CrossRef]
- Zeiler, M.D.; Fergus, R. Visualizing and Understanding Convolutional Networks. In Proceedings of the Computer Vision—ECCV 2014, Zurich, Switzerland, 6–12 September 2014; pp. 818–833. [Google Scholar]
- Simonyan, K.; Zisserman, A. Very Deep Convolutional Networks for Large-scale Image Recognition. In Proceedings of the 3rd International Conference on Learning Representations (ICLR), Banff, AB, Canada, 14–16 April 2014; pp. 1–14. [Google Scholar]
- Khan, S.; Muhammad, K.; Mumtaz, S.; Baik, S.W.; de Albuquerque, V.H.C. Energy-Efficient Deep CNN for Smoke Detection in Foggy IoT Environment. IEEE Internet Things J. 2019, 6, 9237–9245. [Google Scholar] [CrossRef]
- Szegedy, C.; Liu, W.; Jia, Y.; Sermanet, P.; Reed, S.; Anguelov, D.; Erhan, D.; Vanhoucke, V.; Rabinovich, A. Going Deeper With Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Boston, MA, USA, 7–12 June 2015; pp. 1–9. [Google Scholar]
- Peng, Y.; Wang, Y. Real-time Forest Smoke Detection using Hand-designed Features and Deep Learning. Comput. Electron. Agric. 2019, 167, 105029. [Google Scholar] [CrossRef]
- Manchanda, S.; Sharma, S. Analysis of Computer Vision Based Techniques for Motion Detection. In Proceedings of the 6th International Conference-–Cloud System and Big Data Engineering (Confluence), Noida, India, 14–15 January 2016; pp. 445–450. [Google Scholar]
- Iandola, F.N.; Moskewicz, M.W.; Ashraf, K.; Han, S.; Dally, W.J.; Keutzer, K. SqueezeNet: AlexNet-level accuracy with 50x fewer parameters and <1 MB model size. arXiv 2016, arXiv:1602.07360. [Google Scholar]
- Zhang, X.; Zhou, X.; Lin, M.; Sun, J. ShuffleNet: An Extremely Efficient Convolutional Neural Network for Mobile Devices. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 6848–6856. [Google Scholar]
- Chollet, F. Xception: Deep Learning With Depthwise Separable Convolutions. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Honolulu, HI, USA, 21–26 July 2017; pp. 1251–1258. [Google Scholar]
- Howard, A.G.; Zhu, M.; Chen, B.; Kalenichenko, D.; Wang, W.; Weyand, T.; Andreetto, M.; Adam, H. MobileNets: Efficient Convolutional Neural Networks for Mobile Vision Applications. arXiv 2017, arXiv:abs/1704.04861. [Google Scholar]
- Gu, K.; Xia, Z.; Qiao, J.; Lin, W. Deep Dual-Channel Neural Network for Image-Based Smoke Detection. IEEE Trans. Multimed. 2020, 22, 311–323. [Google Scholar] [CrossRef]
- Zhang, F.; Qin, W.; Liu, Y.; Xiao, Z.; Liu, J.; Wang, Q.; Liu, K. A Dual-Channel Convolution Neural Network for Image Smoke Detection. Multimed. Tools Appl. 2020, 79, 34587–34603. [Google Scholar] [CrossRef]
- Jia, Y.; Chen, W.; Yang, M.; Wang, L.; Liu, D.; Zhang, Q. Video Smoke Detection with Domain Knowledge and Transfer Learning from Deep Convolutional Neural Networks. Optik 2021, 240, 166947. [Google Scholar] [CrossRef]
- He, K.; Zhang, X.; Ren, S.; Sun, J. Deep Residual Learning for Image Recognition. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 770–778. [Google Scholar]
- He, L.; Gong, X.; Zhang, S.; Wang, L.; Li, F. Efficient Attention based Deep Fusion CNN for Smoke Detection in Fog Environment. Neurocomputing 2021, 434, 224–238. [Google Scholar] [CrossRef]
- Zhang, Z.; Jin, Q.; Wang, L.; Liu, Z. Video-based Fire Smoke Detection Using Temporal-spatial Saliency Features. Procedia Comput. Sci. 2022, 198, 493–498. [Google Scholar] [CrossRef]
- Cheng, G.; Chen, X.; Gong, J. Deep Convolutional Network with Pixel-aware Attention for Smoke Recognition. Fire Technol. 2022, 58, 1839–1862. [Google Scholar] [CrossRef]
- Tao, H.; Duan, Q. An Adaptive Frame Selection Network with Enhanced Dilated Convolution for Video Smoke Recognition. Expert Syst. Appl. 2023, 215, 119371. [Google Scholar] [CrossRef]
- Cheng, G.; Zhou, Y.; Gao, S.; Li, Y.; Yu, H. Convolution-Enhanced Vision Transformer Network for Smoke Recognition. Fire Technol. 2023, 59, 925–948. [Google Scholar] [CrossRef]
- Dosovitskiy, A.; Beyer, L.; Kolesnikov, A.; Weissenborn, D.; Zhai, X.; Unterthiner, T.; Dehghani, M.; Minderer, M.; Heigold, G.; Gelly, S.; et al. An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale. arXiv 2020, arXiv:abs/2010.11929. [Google Scholar]
- Mohammed, R. A Real-time Forest Fire and Smoke Detection System using Deep Learning. Int. J. Nonlinear Anal. Appl. 2022, 13, 2053–2063. [Google Scholar] [CrossRef]
- Szegedy, C.; Ioffe, S.; Vanhoucke, V.; Alemi, A. Inception-v4, Inception-ResNet and the Impact of Residual Connections on Learning. In Proceedings of the AAAI Conference on Artificial Intelligence (AAAI-17), San Francisko, CA, USA, 4–9 February 2017; pp. 4278–4284. [Google Scholar]
- Chen, X.; Hopkins, B.; Wang, H.; O’Neill, L.; Afghah, F.; Razi, A.; Fulé, P.; Coen, J.; Rowell, E.; Watts, A. Wildland Fire Detection and Monitoring Using a Drone-Collected RGB/IR Image Dataset. IEEE Access 2022, 10, 121301–121317. [Google Scholar] [CrossRef]
- Sandler, M.; Howard, A.; Zhu, M.; Zhmoginov, A.; Chen, L.C. MobileNetV2: Inverted Residuals and Linear Bottlenecks. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, UT, USA, 18–23 June 2018; pp. 4510–4520. [Google Scholar]
- Dilshad, N.; Khan, T.; Song, J. Efficient Deep Learning Framework for Fire Detection in Complex Surveillance Environment. Comput. Syst. Sci. Eng. 2023, 46, 749–764. [Google Scholar] [CrossRef]
- Yar, H.; Khan, Z.A.; Ullah, F.U.M.; Ullah, W.; Baik, S.W. A modified YOLOv5 architecture for efficient fire detection in smart cities. Expert Syst. Appl. 2023, 231, 120465. [Google Scholar] [CrossRef]
- Priya, R.S.; Vani, K. Deep Learning Based Forest Fire Classification and Detection in Satellite Images. In Proceedings of the 11th International Conference on Advanced Computing (ICoAC), Chennai, India, 18–20 December 2019; pp. 61–65. [Google Scholar]
- Szegedy, C.; Vanhoucke, V.; Ioffe, S.; Shlens, J.; Wojna, Z. Rethinking the Inception Architecture for Computer Vision. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Las Vegas, NV, USA, 26 June–1 July 2016; pp. 2818–2826. [Google Scholar]
- Tan, M.; Le, Q. EfficientNet: Rethinking Model Scaling for Convolutional Neural Networks. In Proceedings of the 36th International Conference on Machine Learning, Long Beach, CA, USA, 9–15 June 2019; pp. 6105–6114. [Google Scholar]
- Russakovsky, O.; Deng, J.; Su, H.; Krause, J.; Satheesh, S.; Ma, S.; Huang, Z.; Karpathy, A.; Khosla, A.; Bernstein, M.; et al. Imagenet Large Scale Visual Recognition Challenge. Int. J. Comput. Vis. 2015, 115, 211–252. [Google Scholar] [CrossRef]
- Deng, J.; Dong, W.; Socher, R.; Li, L.J.; Li, K.; Fei-Fei, L. ImageNet: A Large-scale Hierarchical Image Database. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Miami, FL, USA, 20–25 June 2009; pp. 248–255. [Google Scholar]
- Dillon, J.V.; Langmore, I.; Tran, D.; Brevdo, E.; Vasudevan, S.; Moore, D.; Patton, B.; Alemi, A.; Hoffman, M.D.; Saurous, R.A. TensorFlow Distributions. arXiv 2017, arXiv:1711.10604. [Google Scholar]
- Radosavovic, I.; Kosaraju, R.P.; Girshick, R.; He, K.; Dollar, P. Designing Network Design Spaces. In Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, DC, USA, 14–19 June 2020; pp. 10428–10436. [Google Scholar]










| Data | Cloud | Dust | Haze | Land | Seaside | Smoke | Total |
|---|---|---|---|---|---|---|---|
| Training set | 782 | 678 | 673 | 690 | 676 | 682 | 4181 |
| Validation set | 149 | 129 | 128 | 131 | 129 | 130 | 796 |
| Testing set | 233 | 202 | 201 | 206 | 202 | 204 | 1248 |
| Models | Loss | Accuracy (%) | F1-Score (%) | Inference Time (s) |
|---|---|---|---|---|
| CT-Fire | 0.2611 | 90.95 | 90.89 | 0.10 |
| RegNetY-16GF | 0.2668 | 92.31 | 92.26 | 0.04 |
| EfficientFormer v2 | 0.2643 | 92.23 | 92.14 | 0.07 |
| SmokeNet [14] | – | 92.75 | – | – |
| BoucaNet | 0.2184 | 93.67 | 93.64 | 0.16 |
| Models | F1-Score (%) | |||||
|---|---|---|---|---|---|---|
| Cloud | Dust | Haze | Land | Seaside | Smoke | |
| CT-Fire | 94.14 | 86.49 | 86.89 | 91.86 | 96.53 | 88.94 |
| RegNetY- 16GF | 95.34 | 88.61 | 87.32 | 95.47 | 97.80 | 88.84 |
| EfficientFormer v2 | 94.58 | 88.56 | 87.03 | 94.76 | 97.80 | 89.66 |
| BoucaNet | 95.58 | 91.00 | 90.82 | 95.01 | 98.76 | 90.36 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ghali, R.; Akhloufi, M.A. BoucaNet: A CNN-Transformer for Smoke Recognition on Remote Sensing Satellite Images. Fire 2023, 6, 455. https://doi.org/10.3390/fire6120455
Ghali R, Akhloufi MA. BoucaNet: A CNN-Transformer for Smoke Recognition on Remote Sensing Satellite Images. Fire. 2023; 6(12):455. https://doi.org/10.3390/fire6120455
Chicago/Turabian StyleGhali, Rafik, and Moulay A. Akhloufi. 2023. "BoucaNet: A CNN-Transformer for Smoke Recognition on Remote Sensing Satellite Images" Fire 6, no. 12: 455. https://doi.org/10.3390/fire6120455