PROPAGATOR: An Operational Cellular-Automata Based Wildfire Simulator

 , , ,
, , ,
Abstract
:1. Introduction
1.1. Wildfire as a Menacing Natural Hazard
1.2. Mathematical Modeling: An Ally in Wildfire Management
- stochastic lattice or grid-based models, where the evolving quantities are usually described adopting a discretization in space and time, and dealing with the propagation of the fire front from a cell to the neighboring ones by adopting detailed localized evolution rules that comprehend the underlying physics at the desired level of resolution [7,17,18,19,20,21].
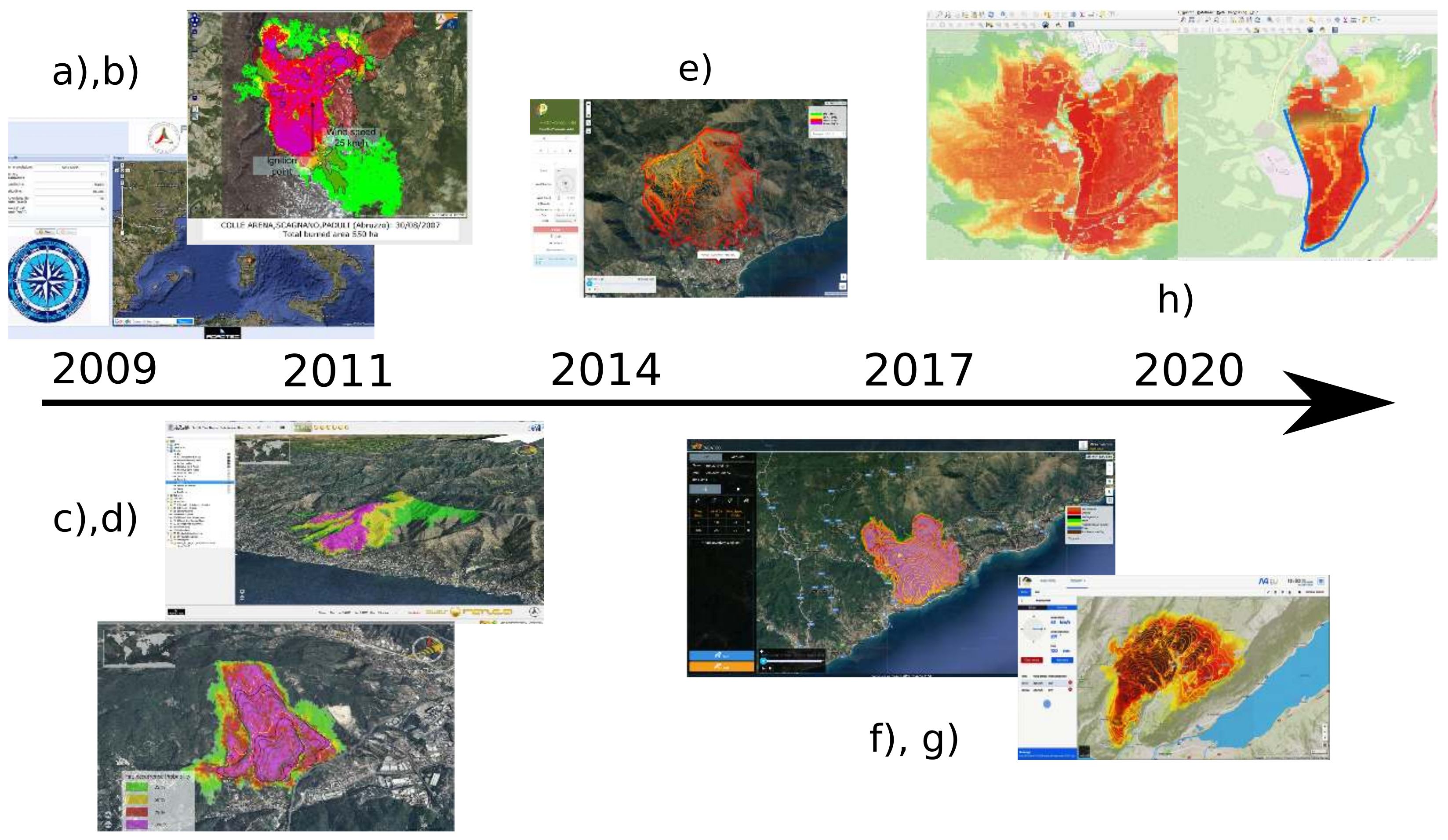
1.3. The Synopsis of PROPAGATOR Implementation: History of the Development of an Operational and Easy-To-Use Simulator
2. PROPAGATOR Model
- State 1 corresponds to cells that are burning during the current simulation step;
- State 0 corresponds to cells that are already burned in previous steps of the simulation;
- State −1 corresponds to cells that are unburned, but that can burn in the following steps of the simulation.
3. Case Studies
3.1. Data Retrieval
3.1.1. Ignition Point, Wind Speed, and Wind Direction
3.1.2. Fire Fighting Actions
3.1.3. Burned Area Geometries
3.1.4. Land-Cover Files
3.1.5. Orography Files
4. Results
4.1. Performance Indicators
4.1.1. Indicator
4.1.2. Indicator
4.1.3. Indicator
4.1.4. Sorensen Coefficient
4.1.5. McNemar Test
4.1.6. Sensitivity and Specificity
5. Discussion
6. Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| CA | Cellular Automata |
| RoS | Rate of Spread |
| DEM | Digital Elevation Model |
| NWP | Numerical Weather Prediction |
References
- San-Miguel-Ayanz, J.; Durrant, T.; Boca, R.; Libertà, G.; Branco, A.; de Rigo, D.; Ferrari, D.; Maianti, P.; Vivancos, T.A.; Pfeiffer, H.; et al. Advance EFFIS Report on Forest Fires in Europe, Middle East and North Africa 2018; Technical Report; Publications Office of the European Union: Luxembourg, 2019. [Google Scholar] [CrossRef]
- Finney, M.A. The COPERNICUS Emergency Management Service monitored the impact of forest fires in Gran Canaria, Spain. EMS INFORMATION BULLETIN 120, Emergency Management Service of Copernicus Programme. 1998. Available online: https://emergency.copernicus.eu/mapping/sites/default/files/files/IB%20EMSR379%20381%20382%20Forest%20fires%20in%20Gran%20Canaria%20Spain_v2.pdf (accessed on 24 April 2020).
- Conedera, M.; Cesti, G.; Pezzatti, G.; Zumbrunnen, T.; Spinedi, F. Lightning-induced fires in the Alpine region: An increasing problem. For. Ecol. Manag. 2006, 234, S68. [Google Scholar] [CrossRef]
- De Rigo, D.; Libertà, G.; Durrant, T.; Artes, T.; San-Miguel-Ayanz, J. Forest Fire Danger Extremes in Europe under Climate Change: Variability and Uncertainty; Publication Office of the European Union: Luxembourg, 2017. [Google Scholar] [CrossRef]
- Castellnou, M.; Prat-Guitart, N.; Arilla, E.; Larrañaga, A.; Nebot, E.; Castellarnau, X.; Vendrell, J.; Pallàs, J.; Herrera, J.; Monturiol, M.; et al. Empowering strategic decision-making for wildfire management: Avoiding the fear trap and creating a resilient landscape. Fire Ecol. 2019, 15, 31. [Google Scholar] [CrossRef]
- Trucchia, A. Front Propagation in Random Media. Ph.D. Thesis, Facultad de Ciencia y Tecnlogía, UPV-EHU, Leioa, Spain, 2019. [Google Scholar]
- Alexandridis, A.; Russo, L.; Vakalis, D.; Bafas, G.; Siettos, C. Wildland fire spread modeling using cellular automata: Evolution in large-scale spatially heterogeneous environments under fire suppression tactics. Int. J. Wildland Fire 2011, 20, 633–647. [Google Scholar] [CrossRef]
- Sullivan, A.L. Wildland surface fire spread modeling, 1990–2007. 1: Physical and quasi-physical models. Int. J. Wildland Fire 2009, 18, 349–368. [Google Scholar] [CrossRef] [Green Version]
- Sullivan, A. Wildland surface fire spread modeling, 1990–2007. 2: Empirical and quasi-empirical models. Int. J. Wildland Fire 2009, 18, 369–386. [Google Scholar] [CrossRef] [Green Version]
- Sullivan, A. Wildland surface fire spread modeling, 1990–2007. 3: Simulation and mathematical analogue models. Int. J. Wildland Fire 2009, 18, 387–403. [Google Scholar] [CrossRef] [Green Version]
- Fernandes, P. Fire spread prediction in shrub fuels in Portugal. For. Ecol. Manag. 2001, 144, 67–74. [Google Scholar] [CrossRef]
- Rothermel, R.C. A Mathematical Model for Predicting Fire Spread in Wildland Fuels; Intermountain Forest & Range Experiment Station, Forest Service, U.S. Dept. of Agriculture: Fort Collins, CO, USA, 1972. [Google Scholar]
- Albini, F.A. A Model for Fire Spread in Wildland Fuels by-Radiation. Combust. Sci. Technol. 1985, 42, 229–258. [Google Scholar] [CrossRef]
- Serón, F.J.; Gutiérrez, D.; Magallón, J.; Ferragut, L.; Asensio, M.I. The evolution of a wildland forest fire front. Vis. Comput. 2005, 21, 152–169. [Google Scholar] [CrossRef]
- Asensio, M.I.; Ferragut, L. On a wildland fire model with radiation. Int. J. Numer. Methods Eng. 2002, 54, 137–157. [Google Scholar] [CrossRef]
- Mell, W.; Jenkins, M.; Gould, J.; Cheney, P. A Physics-Based Approach to Modeling Grassland Fires. Int. J. Wildland Fire 2007, 16, 1–22. [Google Scholar] [CrossRef]
- Berjak, S.G.; Hearne, J.W. An improved cellular automaton model for simulating fire in a spatially heterogeneous Savanna system. Ecol. Model. 2002, 148, 133–151. [Google Scholar] [CrossRef]
- Ghisu, T.; Arca, B.; Pellizzaro, G.; Duce, P. An optimal Cellular Automata algorithm for simulating wildfire spread. Environ. Model. Softw. 2015, 71, 1–14. [Google Scholar] [CrossRef]
- Freire, J.G.; DaCamara, C.C. Using cellular automata to simulate wildfire propagation and to assist in fire management. Nat. Hazards Earth Syst. Sci. 2019, 19, 169–179. [Google Scholar] [CrossRef] [Green Version]
- Green, D.G.; Tridgell, A.; Gill, A. Interactive simulation of bushfires in heterogeneous fuels. Math. Comput. Model. 1990, 13, 57–66. [Google Scholar] [CrossRef]
- Sun, T.; Zhang, L.; Chen, W.; Tang, X.; Qin, Q. Mountains Forest Fire Spread Simulator Based on Geo-Cellular Automaton Combined With Wang Zhengfei Velocity Model. IEEE J. Sel. Top. Appl. Earth Obs. Remote Sens. 2013, 6, 1971–1987. [Google Scholar] [CrossRef]
- Trucchia, A.; Egorova, V.; Butenko, A.; Kaur, I.; Pagnini, G. RandomFront 2.3: A physical parameterisation of fire spotting for operational fire spread models—Implementation in WRF-SFIRE and response analysis with LSFire+. Geosci. Model Dev. 2019, 12, 69–87. [Google Scholar] [CrossRef] [Green Version]
- Perryman, H.A.; Dugaw, C.J.; Varner, J.M.; Johnson, D.L. A cellular automata model to link surface fires to firebrand lift-off and dispersal. Int. J. Wildland Fire 2013, 22, 428–439. [Google Scholar] [CrossRef]
- Von Neumann, J. Theory of Self-Reproducing Automata; University of Illinois Press: Champagne, IL, USA, 1966. [Google Scholar]
- Wolfram, S. Cellular automata as models of complexity. Nature 1984, 311, 419–424. [Google Scholar] [CrossRef]
- Encinas, L.H.; White, S.H.; del Rey, A.M.; Sánchez, G.R. modeling forest fire spread using hexagonal cellular automata. Appl. Math. Model. 2007, 31, 1213–1227. [Google Scholar] [CrossRef]
- Collin, A.; Bernardin, D.; Séro-Guillaume, O. A Physical-Based Cellular Automaton Model for Forest-Fire Propagation. Combust. Sci. Technol. 2011, 183, 347–369. [Google Scholar] [CrossRef]
- Finney, M.A. FARSITE: Fire Area Simulator-Model Development and Evaluation; General Technical Report RMRS-RP-4; U.S. Department of Agriculture, Forest Service, Rocky Mountain Research Station: Ogden, UT, USA, 1998. [Google Scholar]
- Italian Civil Protection Department; CIMA Research Foundation. The Dewetra Platform: A Multi-perspective Architecture for Risk Management during Emergencies. In Proceedings of the Information Systems for Crisis Response and Management in Mediterranean Countries: First International Conference, ISCRAM-med 2014, Toulouse, France, 15–17 October 2014; Hanachi, C., Bénaben, F., Charoy, F., Eds.; Springer International Publishing: Cham, Switzerland, 2014; pp. 165–177. [Google Scholar]
- Habdank, M.; Schäfer, C.; Scholle, P.; Pottebaum, J.; Thiele, H.; Láng, I.; Ruin, I.; Capone, F. Deliverable 5.3: Report on Best Practices and Strategies for Innovative Self-Preparedness and Self-Protection and the Summary of Lessons Learned from Case Studies. Technical Report, ANYWHERE Deliverable Report. 2019. Available online: http://anywhere-h2020.eu/docs/ (accessed on 24 April 2020).
- Fiorucci, P.; D’Andrea, M.; Negro, D.; Gollini, A.; Severino, M. I Aggiornamento Del Manuale D’uso Del Sistema Previsionale Della Pericolosità Potenziale Degli Incendi Boschivi RIS.I.CO.—RISICO2015. Technical Report, Italian Department of Civil Protection—Presidency of the Council of Ministers, and CIMA Research Foundation. 2015. Available online: http://www.mydewetra.org/wiki (accessed on 24 April 2020).
- Burgan, R.E.; Rothermel, R.C. BEHAVE: Fire Behavior Prediction and Fuel Modeling System, Fuel Subsystem; U.S. Dept. of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Fort Collins, CO, USA, 1984. [Google Scholar]
- Burgan, R.; Scott, J. Standard Fire Behavior Fuel Models: A Comprehensive Set for Use with Rothermel’s Surface Fire Spread Model; CreateSpace Independent Publishing Platform: Scotts Valley, CA, USA, 2015. [Google Scholar]
- Anderson, H.E. Aids to Determining Fuel Models for Estimating Fire Behavior; General Technical Report INT-122; U.S. Department of Agriculture, Forest Service, Intermountain Forest and Range Experiment Station: Ogden, UT, USA, 1982. [Google Scholar] [CrossRef] [Green Version]
- Dimitrakopoulos, A. Mediterranean fuel models and potential fire behavior in Greece. Int. J. Wildland Fire 2002, 11, 127–130. [Google Scholar] [CrossRef]
- Cruz, M.; Fernandes, P. Development of fuel models for fire behavior prediction in maritime pine (Pinus pinaster Ait.) stands. Int. J. Wildland Fire 2008, 17, 194–204. [Google Scholar] [CrossRef] [Green Version]
- Cai, L.; He, H.S.; Wu, Z.; Lewis, B.L.; Liang, Y. Development of standard fuel models in boreal forests of Northeast China through calibration and validation. PLoS ONE 2014, 9, e94043. [Google Scholar] [CrossRef] [PubMed]
- Hargrove, W.; Gardner, R.; Turner, M.; Romme, W.; Despain, D. Simulating fire patterns in heterogeneous landscapes. Ecol. Model. 2000, 135, 243–263. [Google Scholar] [CrossRef] [Green Version]
- Tonini, M.; D’Andrea, M.; Biondi, G.; Degli Esposti, S.; Trucchia, A.; Fiorucci, P. A Machine Learning-Based Approach for Wildfire Susceptibility Mapping. The Case Study of the Liguria Region in Italy. Geosciences 2020, 10, 105. [Google Scholar] [CrossRef] [Green Version]
- Marino, E.; Dupuy, J.L.; Pimont, F.; Guijarro, M.; Hernando, C.; Linn, R. Fuel bulk density and fuel moisture content effects on fire rate of spread: A comparison between FIRETEC model predictions and experimental results in shrub fuels. J. Fire Sci. 2012, 30, 277–299. [Google Scholar] [CrossRef]
- Arca, B.; Ghisu, T.; Casula, M.; Salis, M.; Duce, P. A web-based wildfire simulator for operational applications. Int. J. Wildland Fire 2019, 28, 99–112. [Google Scholar] [CrossRef]
- Agresti, A. An Introduction to Categorical Data Analysis; Wiley Series in Probability and Statistics; Wiley Publishing: Hoboken, NJ, USA, 2007. [Google Scholar]
- Sorensen, T. A Method of Establishing Groups of Equal Amplitudes in Plant Sociology Based on Similarity of Species Content and Its Application to Analyses of the Vegetation on Danish Commons. K. Dan. Vidensk. Selsk. Biol. Skr. 1948, 5, 1–34. [Google Scholar]
- Mallinis, G.; Galidaki, G.; Gitas, I. A Comparative Analysis of EO-1 Hyperion, Quickbird and Landsat TM Imagery for Fuel Type Mapping of a Typical Mediterranean Landscape. Remote Sens. 2014, 6, 1684–1704. [Google Scholar] [CrossRef] [Green Version]
- Edwards, A.L. Note on the “correction for continuity” in testing the significance of the difference between correlated proportions. Psychometrika 1948, 13, 185–187. [Google Scholar] [CrossRef]
- Montealegre, A.L.; Lamelas, M.T.; Tanase, M.A.; De la Riva, J. Forest Fire Severity Assessment Using ALS Data in a Mediterranean Environment. Remote Sens. 2014, 6, 4240–4265. [Google Scholar] [CrossRef] [Green Version]
- Fiorucci, P.; D’Andrea, M.; Negro, D.; Severino, M. Manuale D’uso Del Sistema Previsionale Della Pericolosità Potenziale Degli Incendi Boschivi RIS.I.CO. Technical Report, Italian Department of Civil Protection—Presidency of the Council of Ministers, and CIMA Research Foundation. 2011. Available online: http://www.mydewetra.org/wiki (accessed on 24 April 2020).
- Fiorucci, P.; Gaetani, F.; Minciardi, R. Development and application of a system for dynamic wildfire risk assessment in Italy. Environ. Model. Softw. 2008, 23, 690–702. [Google Scholar] [CrossRef]
- Salis, M.; Arca, B.; Pellizzaro, G.; Ventura, A.; Canu, A.; Casula, M.; Del Giudice, L.; Scarpa, C.; Schirru, M.; Duce, P. MED-Star: Strategies and Measures to Reduce Wildfire Risk in the Mediterranean Area. EGU2020-18892, EGU General Assembly. 4–8 May 2020. Available online: https://meetingorganizer.copernicus.org/EGU2020/EGU2020-18892.html (accessed on 24 April 2020). [CrossRef]
- Trucchia, A.; Egorova, V.; Pagnini, G.; Rochoux, M. On the merits of sparse surrogates for global sensitivity analysis of multi-scale nonlinear problems: Application to turbulence and fire-spotting model in wildland fire simulators. Commun. Nonlinear Sci. Numer. Simul. 2019, 73, 120–145. [Google Scholar] [CrossRef] [Green Version]














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Burning Cell | |||||||
|---|---|---|---|---|---|---|---|
| Broadleaves | Shrubs | Grassland | Fire-Prone Conifers | Agro-Forestry Areas | Not Fire-Prone Forest | ||
| neighbor cells | Broadleaves | 0.3 | 0.375 | 0.25 | 0.275 | 0.25 | 0.25 |
| Shrubs | 0.375 | 0.375 | 0.35 | 0.4 | 0.3 | 0.375 | |
| Grassland | 0.45 | 0.475 | 0.475 | 0.475 | 0.375 | 0.475 | |
| Fire-prone conifers | 0.225 | 0.325 | 0.25 | 0.35 | 0.2 | 0.35 | |
| Agro-forestry areas | 0.25 | 0.25 | 0.3 | 0.475 | 0.35 | 0.25 | |
| Not fire-prone forest | 0.075 | 0.1 | 0.075 | 0.275 | 0.075 | 0.075 | |
| Nominal Fire Spread Velocity [m/min] | 100 | 140 | 120 | 200 | 120 | 60 | |
| Fire Event | Region | Date | Ignition Point | Burnt | Wind Speed [km/h] | Human | |
|---|---|---|---|---|---|---|---|
| (Nation) | Latitude | Longitude | Area [ha] | (Direction []) | Activity | ||
| Avinyo | Catalonia | 05/07/2017 | 41.83733 N | 1.97016 E | 90 | 10 (180) | High |
| (Spain) | |||||||
| Blanes | Catalonia | 24/07/2016 | 41.70457 N | 2.77539 E | 30.6 | 35 (200) | High |
| (Spain) | |||||||
| Fasce | Liguria | 06/09/2009 | 44.39118 N | 9.03743 E | 945.3 | 45 (50) | Low |
| mountain | (Italy) | ||||||
| Ittiri | Sardinia | 23/07/2009 | 40.57170 N | 8.58768 E | 5130.7 | 40 (240) | Low |
| (Italy) | |||||||
| Sant Fruitos | Catalonia | 22/07/2017 | 41.73432 N | 1.86608 E | 105.2 | 20 (120) | Medium |
| de Bages | (Spain) | ||||||
| Wildfire | Time Duration of the Simulation [h] | Time Duration of CPU Time [min] |
|---|---|---|
| Avinyo | 12 | ≃1 |
| Blanes | 24 | ≃2 |
| Fasce mountain | 48 | ≃5 |
| Ittiri | 24 | ≃5 |
| Sant Fruitos de Bages | 12 | ≃1 |
| Wildfire | McNemar p-Value | ||||||
|---|---|---|---|---|---|---|---|
| Avinyo | 1.37 × | 0.81 | < | 0.85 | 0.96 | ||
| Avinyo (no Fire Fighting) | 0.22 | < | 0.88 | 0.63 | |||
| Blanes | 0.63 | < | 0.98 | 0.93 | |||
| Fasce | 0.86 | < | 0.83 | 0.96 | |||
| Ittiri | 0.89 | < | 0.89 | 0.92 | |||
| Sant Fruitos de Bages | 0.82 | < | 0.89 | 0.96 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Trucchia, A.; D’Andrea, M.; Baghino, F.; Fiorucci, P.; Ferraris, L.; Negro, D.; Gollini, A.; Severino, M. PROPAGATOR: An Operational Cellular-Automata Based Wildfire Simulator. Fire 2020, 3, 26. https://doi.org/10.3390/fire3030026
Trucchia A, D’Andrea M, Baghino F, Fiorucci P, Ferraris L, Negro D, Gollini A, Severino M. PROPAGATOR: An Operational Cellular-Automata Based Wildfire Simulator. Fire. 2020; 3(3):26. https://doi.org/10.3390/fire3030026
Chicago/Turabian StyleTrucchia, Andrea, Mirko D’Andrea, Francesco Baghino, Paolo Fiorucci, Luca Ferraris, Dario Negro, Andrea Gollini, and Massimiliano Severino. 2020. "PROPAGATOR: An Operational Cellular-Automata Based Wildfire Simulator" Fire 3, no. 3: 26. https://doi.org/10.3390/fire3030026