
Recent Progress on Electroactive Polymers: Synthesis, Properties and Applications


Abstract
:
1. Introduction
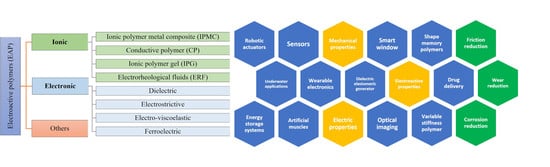
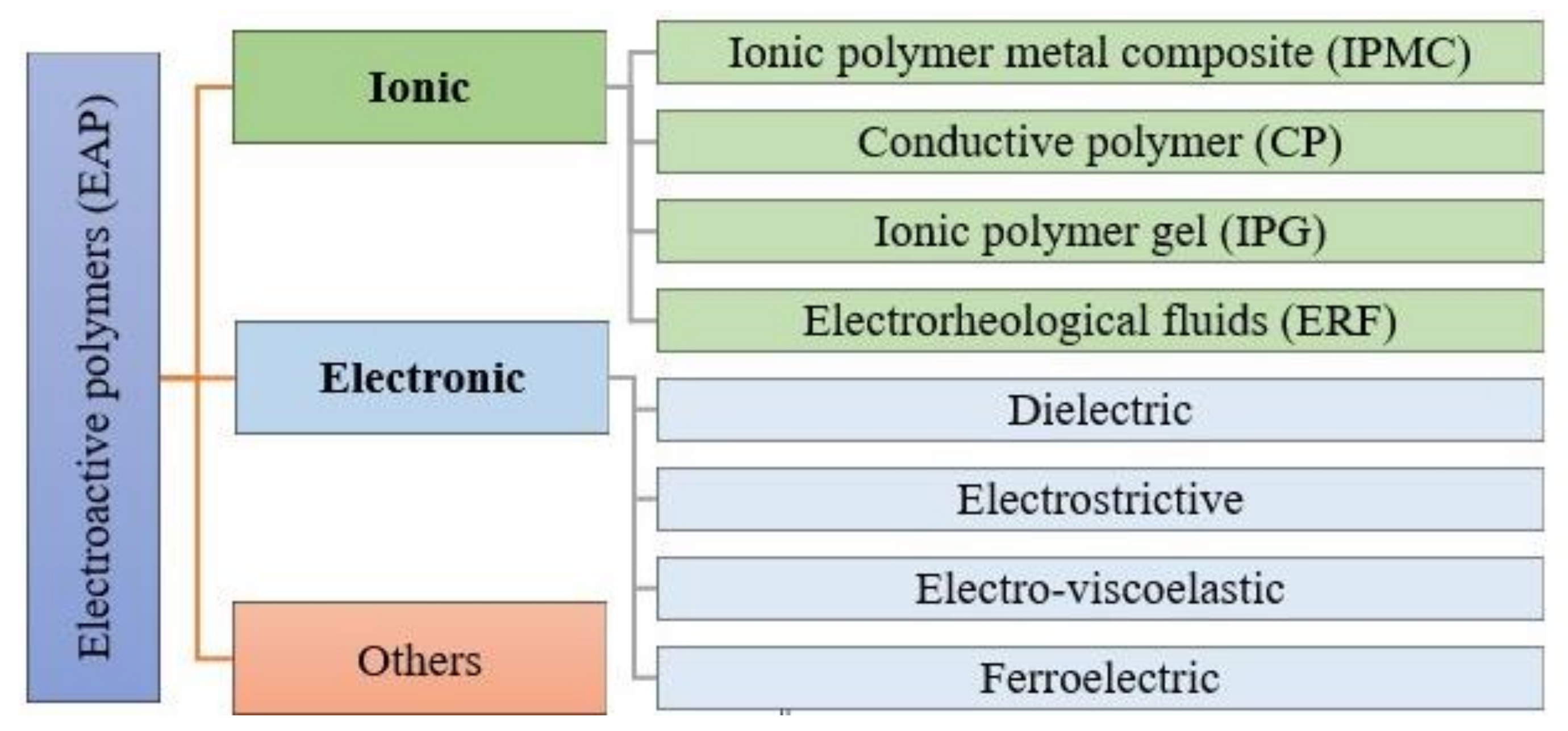
2. Different Types of EAPs
2.1. Ionic Electroactive Polymers
2.1.1. Ionic Polymer-Metal Composites (IPMCs)
2.1.2. Conducting Polymers (CPs)
2.1.3. Ionic Polymer Gels (IPG)
2.1.4. Electrorheological Fluids (ERFs)
2.2. Electronic and Other Types of EAPs
2.2.1. Dielectric EAPs
2.2.2. Electrostrictive (Graft and Paper)
2.2.3. Electro-Viscoelastic
2.2.4. Ferroelectric
2.2.5. Other EAPs
3. Properties of EAPs
3.1. Properties of Ionic EAPs
3.2. Properties of Electronic EAPs
3. Properties of Conjugated EAPs
4. Recent Advancements in the Applications of Electroactive Polymers
- (a)
- Robotic Actuators:
- (b)
- Synthetic muscles:
- (c)
- Underwater applications:
- (d)
- Wearable electronics:
- (e)
- Energy storage systems:
- (f)
- Drug delivery:
- (g)
- Shape memory polymers:
- (h)
- Dielectric elastomeric generator:
- (i)
- Optical imaging:
- (j)
- Variable stiffness polymer (VSP):
- (k)
- Smart window:
5. Recent Advances and Challenges of EAPs
- (a)
- Tribological advances:
- (b)
- Corrosion reduction:
- (c)
- Notable challenges:
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Bar-Cohen, Y.; Anderson, I.A. Electroactive polymer (EAP) actuators—Background review. Mech. Soft Mater. 2019, 1, 5. [Google Scholar] [CrossRef] [Green Version]
- Bar-Cohen, Y.; Zhang, Q. Electroactive Polymer Actuators and Sensors. MRS Bull. 2008, 33, 173–181. [Google Scholar] [CrossRef] [Green Version]
- Hunt, A.; Chen, Z.; Tan, X.; Kruusmaa, M. An integrated electroactive polymer sensor–actuator: Design, model-based control, and performance characterization. Smart Mater. Struct. 2016, 25, 035016. [Google Scholar] [CrossRef] [Green Version]
- Palza, H.; Zapata, P.A.; Angulo-Pineda, C. Electroactive Smart Polymers for Biomedical Applications. Materials 2019, 12, 277. [Google Scholar] [CrossRef] [Green Version]
- Khuyen, N.Q.; Kiefer, R.; Elhi, F.; Anbarjafari, G.; Martinez, J.G.; Tamm, T. A biomimetic approach to increasing soft actuator performance by friction reduction. Polymers 2020, 12, 1120. [Google Scholar] [CrossRef] [PubMed]
- Neuhaus, R.; Zahiri, N.; Petrs, J.; Tahouni, Y.; Siegert, J.; Kolaric, I.; Dahy, H.; Bauernhansl, T. Integrating ionic electroactive polymer actuators and sensors into adaptive building skins: Potentials and limitations. Front. Built Environ. 2020, 6, 95. [Google Scholar] [CrossRef]
- Research and Markets. Electroactive Polymer Market by Type (Conductive Plastic, Inherently Conductive Polymer, Inherently Dissipative Polymer), Application (ESD Protection, EMI Shielding, Actuators, Capacitors, Batteries, Sensors), and Region—Global Forecast to 2022. Available online: https://www.researchandmarkets.com/reports/4460750/electroactive-polymer-market-by-type-conductive (accessed on 11 July 2021).
- Tagarielli, V.L.; Hildick-Smith, R.; Huber, J.E. Electro-mechanical properties and electrostriction response of a rubbery polymer for EAP applications. Int. J. Solids Struct. 2012, 49, 3409–3415. [Google Scholar] [CrossRef] [Green Version]
- Põldsalu, I.; Johanson, U.; Tamm, T.; Punning, A.; Greco, F.; Peikolainen, A.-L.; Kiefer, R.; Aabloo, A. Mechanical and electro-mechanical properties of EAP actuators with inkjet printed electrodes. Synth. Met. 2018, 246, 122–127. [Google Scholar] [CrossRef]
- Abidi, H.; Cianchetti, M. On intrinsic safety of soft robots. Front. Robot. AI 2017, 4, 5. [Google Scholar] [CrossRef]
- Onal, C.D.; Rus, D. Autonomous undulatory serpentine locomotion utilizing body dynamics of a fluidic soft robot. Bioinspir. Biomim. 2013, 8, 026003. [Google Scholar] [CrossRef] [PubMed]
- Forouharshad, M.; King, S.G.; Buxton, W.; Kunovski, P.; Stolojan, V. Textile-Compatible, Electroactive Polyvinylidene Fluoride Electrospun Mats for Energy Harvesting. Macromol. Chem. Phys. 2019, 220, 1900364. [Google Scholar] [CrossRef]
- Koo, I.M.; Jung, K.; Koo, J.C.; Nam, J.-D.; Lee, Y.K.; Choi, H.R. Development of soft-actuator-based wearable tactile display. IEEE Trans. Robot. 2008, 24, 549–558. [Google Scholar] [CrossRef]
- Research and Markets. Global Electroactive Polymer Market, 2018–2022 by Type, Application, and Region; Cision PR Newswire: New York, NY, USA, 2021. [Google Scholar]
- Jo, C.; Pugal, D.; Oh, I.-K.; Kim, K.J.; Asaka, K. Recent advances in ionic polymer–metal composite actuators and their modeling and applications. Prog. Polym. Sci. 2013, 38, 1037–1066. [Google Scholar] [CrossRef]
- Hong, W.; Almomani, A.; Chen, Y.; Jamshidi, R.; Montazami, R. Soft ionic electroactive polymer actuators with tunable non-linear angular deformation. Materials 2017, 10, 664. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Palmre, V.; Brandell, D.; Mäeorg, U.; Torop, J.; Volobujeva, O.; Punning, A.; Johanson, U.; Kruusmaa, M.; Aabloo, A. Nanoporous carbon-based electrodes for high strain ionomeric bending actuators. Smart Mater. Struct. 2009, 18, 095028. [Google Scholar] [CrossRef]
- Kim, O.; Kim, S.J.; Park, M.J. Low-voltage-driven soft actuators. Chem. Commun. 2018, 54, 4895–4904. [Google Scholar] [CrossRef] [Green Version]
- Cai, M.; Yu, Q.; Liu, W.; Zhou, F. Ionic liquid lubricants: When chemistry meets tribology. Chem. Soc. Rev. 2020, 49, 7753–7818. [Google Scholar] [CrossRef] [PubMed]
- Rahman, M.H.; Warneke, H.; Webbert, H.; Rodriguez, J.; Austin, E.; Tokunaga, K.; Rajak, D.K.; Menezes, P.L. Water-Based Lubricants: Development, Properties, and Performances. Lubricants 2021, 9, 73. [Google Scholar] [CrossRef]
- Rinne, P.; Põldsalu, I.; Ratas, H.K.; Kruusamäe, K.; Johanson, U.; Tamm, T.; Põhako-Esko, K.; Punning, A.; Peikolainen, A.-L.; Kaasik, F. Fabrication of Carbon-Based Ionic Electromechanically Active Soft Actuators. JoVE (J. Vis. Exp.) 2020, e61216. [Google Scholar] [CrossRef]
- Yip, J.; Feng, L.S.; Hang, C.W.; Marcus, Y.C.W.; Wai, K.C. Experimentally validated improvement of IPMC performance through alternation of pretreatment and electroless plating processes. Smart Mater. Struct. 2010, 20, 015009. [Google Scholar] [CrossRef]
- Kim, K.J.; Shahinpoor, M. Ionic polymer–metal composites: II. Manufacturing techniques. Smart Mater. Struct. 2003, 12, 65. [Google Scholar] [CrossRef]
- Rasouli, H.; Naji, L.; Hosseini, M.G. Electrochemical and electromechanical behavior of Nafion-based soft actuators with PPy/CB/MWCNT nanocomposite electrodes. RSC Adv. 2017, 7, 3190–3203. [Google Scholar] [CrossRef] [Green Version]
- Malinauskas, A. Chemical deposition of conducting polymers. Polymer 2001, 42, 3957–3972. [Google Scholar] [CrossRef]
- Hu, F.; Xue, Y.; Xu, J.; Lu, B. PEDOT-based conducting polymer actuators. Front. Robot. AI 2019, 6, 114. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Kaneto, K.; Fujisue, H.; Kunifusa, M.; Takashima, W. Conducting polymer soft actuators based on polypyrrole films—Energy conversion efficiency. Smart Mater. Struct. 2007, 16, S250. [Google Scholar] [CrossRef]
- Ramírez-García, S.; Diamond, D. Biomimetic, low power pumps based on soft actuators. Sens. Actuators A Phys. 2007, 135, 229–235. [Google Scholar] [CrossRef]
- Jo, A.; Huet, C.; Naguib, H.E. Template-Assisted Self-Assembly of Conductive Polymer Electrodes for Ionic Electroactive Polymers. Front. Bioeng. Biotechnol. 2020, 8, 837. [Google Scholar] [CrossRef]
- Zhang, C.; He, B.; Wang, Z.; Zhou, Y.; Ming, A. Application and Analysis of an Ionic Liquid Gel in a Soft Robot. Adv. Mater. Sci. Eng. 2019, 2019, 2857282. [Google Scholar] [CrossRef] [Green Version]
- Fukushima, T.; Kosaka, A.; Ishimura, Y.; Yamamoto, T.; Takigawa, T.; Ishii, N.; Aida, T. Molecular ordering of organic molten salts triggered by single-walled carbon nanotubes. Science 2003, 300, 2072–2074. [Google Scholar] [CrossRef] [Green Version]
- Terasawa, N. High-performance transparent actuator made from Poly (dimethylsiloxane)/Ionic liquid gel. Sens. Actuators B Chem. 2018, 257, 815–819. [Google Scholar] [CrossRef]
- Goswami, S.; Gonçalves, P.; Cidade, M.T. Electrorheological behavior of suspensions of camphorsulfonic acid (CSA) doped polyaniline nanofibers in silicone oil. Phys. Scr. 2017, 92, 075801. [Google Scholar] [CrossRef]
- Linzhi, L.I.; Shujuan, G.A.O. Polyaniline (PANI) and BaTiO3 composite nanotube with high suspension performance in electrorheological fluid. Mater. Today Commun. 2020, 24, 100993. [Google Scholar] [CrossRef]
- Xi, Z.; Ma, J.; Sun, W.; Wang, B.; Hao, C. Synthesis and electrorheological properties of hierarchical and core-shell MoS2@ TiO2 nanocomposite. J. Solid State Chem. 2020, 290, 121601. [Google Scholar] [CrossRef]
- Tang, J.; Wen, X.; Liu, Z.; Wang, J.; Zhang, P. Synthesis and electrorheological performances of 2D PANI/TiO2 nanosheets. Colloids Surf. A Physicochem. Eng. Asp. 2018, 552, 24–31. [Google Scholar] [CrossRef]
- Fei, J.; Cui, Y.; Yan, X.; Yang, Y.; Su, Y.; Li, J. Formation of PANI tower-shaped hierarchical nanostructures by a limited hydrothermal reaction. J. Mater. Chem. 2009, 19, 3263–3267. [Google Scholar] [CrossRef]
- Wu, S.; Tian, S.; Menezes, P.L.; Xiong, G. Carbon solid lubricants: Role of different dimensions. Int. J. Adv. Manuf. Technol. 2020, 107, 3875–3895. [Google Scholar] [CrossRef]
- Elhi, F.; Karu, K.; Rinne, P.; Nadel, K.-A.; Järvekülg, M.; Aabloo, A.; Tamm, T.; Ivaništšev, V.; Põhako-Esko, K. Understanding the Behavior of Fully Non-Toxic Polypyrrole-Gelatin and Polypyrrole-PVdF Soft Actuators with Choline Ionic Liquids. Actuators 2020, 9, 40. [Google Scholar] [CrossRef]
- Kang, Y.J.; Yoo, Y.; Kim, W. 3-V solid-state flexible supercapacitors with ionic-liquid-based polymer gel electrolyte for AC line filtering. ACS Appl. Mater. Interfaces 2016, 8, 13909–13917. [Google Scholar] [CrossRef] [PubMed]
- Lee, J.Y.; Wang, H.S.; Yoon, B.R.; Han, M.J.; Jho, J.Y. Radiation-Grafted Fluoropolymers Soaked with Imidazolium-Based Ionic Liquids for High-Performance Ionic Polymer–Metal Composite Actuators. Macromol. Rapid Commun. 2010, 31, 1897–1902. [Google Scholar] [CrossRef] [PubMed]
- Wang, T.; Farajollahi, M.; Choi, Y.S.; Lin, I.T.; Marshall, J.E.; Thompson, N.M.; Kar-Narayan, S.; Madden, J.D.W.; Smoukov, S.K. Electroactive polymers for sensing. Interface Focus 2016, 6, 20160026. [Google Scholar] [CrossRef] [PubMed]
- Araromi, O.A.; Conn, A.T.; Ling, C.S.; Burgess, S.C.; Vaidyanathan, R. A Novel Fabrication Set-up for the Flexible Production of Silicone Based EAP “Artificial Muscle” Actuators. Des. Nat. V 2010, 138, 289–300. [Google Scholar]
- Bar-Cohen, Y. Electroactive Polymer (EAP) Actuators as Artificial Muscles: Reality, Potential, and Challenges; SPIE Press: Bellingham, WA, USA, 2004; Volume 136. [Google Scholar]
- Pelrine, R.E.; Kornbluh, R.D.; Joseph, J.P. Electrostriction of polymer dielectrics with compliant electrodes as a means of actuation. Sens. Actuators A Phys. 1998, 64, 77–85. [Google Scholar] [CrossRef]
- Trujillo, R.; Mou, J.; Phelan, P.E.; Chau, D.S. Investigation of electrostrictive polymers as actuators for mesoscale devices. Int. J. Adv. Manuf. Technol. 2004, 23, 176–182. [Google Scholar] [CrossRef]
- Mirfakhrai, T.; Madden, J.D.; Baughman, R.H. Polymer artificial muscles. Mater. Today 2007, 10, 30–38. [Google Scholar] [CrossRef]
- Ask, A.; Menzel, A.; Ristinmaa, M. Electrostriction in electro-viscoelastic polymers. Mech. Mater. 2012, 50, 9–21. [Google Scholar] [CrossRef]
- Qin, H.; Ning, N.; Tian, M.; Zhang, L.; Mi, J. Effect of adding epoxy groups to poly (butyl acrylate) on electro-viscoelastic response: Insight from molecular dynamics simulation. Polymer 2020, 193, 122349. [Google Scholar] [CrossRef]
- Eder-Goy, D.; Zhao, Y.; Xu, B.-X. Dynamic pull-in instability of a prestretched viscous dielectric elastomer under electric loading. Acta Mech. 2017, 228, 4293–4307. [Google Scholar] [CrossRef]
- Zhang, Q.M.; Bharti, V.; Zhao, X. Giant Electrostriction and Relaxor Ferroelectric Behavior in Electron-Irradiated Poly(vinylidene fluoride-trifluoroethylene) Copolymer. Science 1998, 280, 2101–2104. [Google Scholar] [CrossRef]
- Chu, B.; Zhou, X.; Ren, K.; Neese, B.; Lin, M.; Wang, Q.; Bauer, F.; Zhang, Q.M. A Dielectric Polymer with High Electric Energy Density and Fast Discharge Speed. Science 2006, 313, 334–336. [Google Scholar] [CrossRef]
- Neese, B.; Chu, B.; Lu, S.-G.; Wang, Y.; Furman, E.; Zhang, Q.M. Large Electrocaloric Effect in Ferroelectric Polymers near Room Temperature. Science 2008, 321, 821–823. [Google Scholar] [CrossRef]
- Chen, X.Z.; Li, Q.; Chen, X.; Guo, X.; Ge, H.X.; Liu, Y.; Shen, Q.D. Nano-Imprinted Ferroelectric Polymer Nanodot Arrays for High Density Data Storage. Adv. Funct. Mater. 2013, 23, 3124–3129. [Google Scholar] [CrossRef]
- Palto, S.P.; Yudin, S.G.; Zlatkin, A.; Blinov, L.M.; Sorokin, A.V.; Bune, A.V.; Ducharme, S.; Fridkin, V.M. Two-dimensional ferroelectric films. Nature 1998, 391, 874–877. [Google Scholar] [CrossRef] [Green Version]
- Li, F.; Zhang, S.; Damjanovic, D.; Chen, L.Q.; Shrout, T.R. Local structural heterogeneity and electromechanical responses of ferroelectrics: Learning from relaxor ferroelectrics. Adv. Funct. Mater. 2018, 28, 1801504. [Google Scholar] [CrossRef]
- Bauer, F. Relaxor fluorinated polymers: Novel applications and recent developments. IEEE Trans. Dielectr. Electr. Insul. 2010, 17, 1106–1112. [Google Scholar] [CrossRef]
- Xia, F.; Cheng, Z.Y.; Xu, H.; Li, H.; Zhang, Q.; Kavarnos, G.J.; Ting, R.Y.; Abdul-Sadek, G.; Belfield, K.D. High electromechanical responses in a poly (vinylidene fluoride–trifluoroethylene–chlorofluoroethylene) terpolymer. Adv. Mater. 2002, 14, 1574–1577. [Google Scholar] [CrossRef]
- Chen, D.; Pei, Q. Electronic muscles and skins: A review of soft sensors and actuators. Chem. Rev. 2017, 117, 11239–11268. [Google Scholar] [CrossRef] [PubMed]
- Benslimane, M.Y.; Kiil, H.E.; Tryson, M.J. Dielectric electro-active polymer push actuators: Performance and challenges. Polym. Int. 2010, 59, 415–421. [Google Scholar] [CrossRef]
- Berardi, U. Dielectric electroactive polymer applications in buildings. Intell. Build. Int. 2010, 2, 167–178. [Google Scholar]
- Saha, S.; Bhowmick, A.K.; Kumar, A.; Patra, K.; Cottinet, P.-J.; Thetpraphi, K. Polyvinylidene Fluoride/Hydrogenated Nitrile Rubber-Based Flexible Electroactive Polymer Blend and Its Nanocomposites with Improved Actuated Strain: Characterization and Analysis of Electrostrictive Behavior. Ind. Eng. Chem. Res. 2020, 59, 3413–3424. [Google Scholar] [CrossRef]
- Qian, X.; Wu, S.; Furman, E.; Zhang, Q.; Su, J. Ferroelectric polymers as multifunctional electroactive materials: Recent advances, potential, and challenges. MRS Commun. 2015, 5, 115–129. [Google Scholar] [CrossRef]
- Feng, C.; Rajapaksha, C.P.H.; Cedillo, J.M.; Piedrahita, C.; Cao, J.; Kaphle, V.; Lüssem, B.; Kyu, T.; Jákli, A. Electroresponsive ionic liquid crystal elastomers. Macromol. Rapid Commun. 2019, 40, 1900299. [Google Scholar] [CrossRef] [PubMed]
- Shankar, R.; Ghosh, T.K.; Spontak, R.J. Mechanical and actuation behavior of electroactive nanostructured polymers. Sens. Actuators A Phys. 2009, 151, 46–52. [Google Scholar] [CrossRef]
- Park, I.-S.; Kim, S.-M.; Kim, K.J. Mechanical and thermal behavior of ionic polymer–metal composites: Effects of electroded metals. Smart Mater. Struct. 2007, 16, 1090. [Google Scholar] [CrossRef]
- UKEssays. Classes of Electroactive Polymer Materials. Available online: https://www.ukessays.com/essays/chemistry/classes-of-electroactive-polymer-materials.php?vref=1 (accessed on 11 July 2021).
- Xu, Y.; Jia, W.; Zhang, Y.; Wang, F.; Zhao, G.; Zang, D. Mechanical properties analysis and surface composition research of Ag-IPMC. Sens. Actuators A Phys. 2021, 319, 112565. [Google Scholar] [CrossRef]
- Cuenot, S.; Demoustier-Champagne, S.; Nysten, B. Elastic modulus of polypyrrole nanotubes. Phys. Rev. Lett. 2000, 85, 1690. [Google Scholar] [CrossRef] [PubMed]
- Sharma, R.K.; Rastogi, A.C.; Desu, S.B. Pulse polymerized polypyrrole electrodes for high energy density electrochemical supercapacitor. Electrochem. Commun. 2008, 10, 268–272. [Google Scholar] [CrossRef]
- Hara, S.; Zama, T.; Sewa, S.; Takashima, W.; Kaneto, K. Highly stretchable and powerful polypyrrole linear actuators. Chem. Lett. 2003, 32, 576–577. [Google Scholar] [CrossRef]
- Huang, Z.-D.; Liang, R.; Zhang, B.; He, Y.-B.; Kim, J.-K. Evolution of flexible 3D graphene oxide/carbon nanotube/polyaniline composite papers and their supercapacitive performance. Compos. Sci. Technol. 2013, 88, 126–133. [Google Scholar] [CrossRef]
- Okuzaki, H.; Suzuki, H.; Ito, T. Electromechanical properties of poly (3,4-ethylenedioxythiophene)/poly (4-styrene sulfonate) films. J. Phys. Chem. B 2009, 113, 11378–11383. [Google Scholar] [CrossRef] [PubMed]
- Wang, X.-S.; Feng, X.-Q. Effects of thickness on mechanical properties of conducting polythiophene films. J. Mater. Sci. Lett. 2002, 21, 715–717. [Google Scholar] [CrossRef]
- Vijeth, H.; Ashokkumar, S.P.; Yesappa, L.; Niranjana, M.; Vandana, M.; Devendrappa, H. Flexible and high energy density solid-state asymmetric supercapacitor based on polythiophene nanocomposites and charcoal. RSC Adv. 2018, 8, 31414–31426. [Google Scholar]
- Akagi, K.; Sakamaki, K.; Shirakawa, H.; Kyotani, H. Polyacetylene films prepared by intrinsic non-solvent polymerization method-mechanical properties and electrical conductivities. Synth. Met. 1995, 69, 29–30. [Google Scholar] [CrossRef]
- Cao, Y.; Smith, P.; Heeger, A.J. Mechanical and electrical properties of polyacetylene films oriented by tensile drawing. Polymer 1991, 32, 1210–1218. [Google Scholar] [CrossRef]
- Liu, Y.; Liu, L.; Zhang, Z.; Leng, J. Dielectric elastomer film actuators: Characterization, experiment and analysis. Smart Mater. Struct. 2009, 18, 095024. [Google Scholar] [CrossRef]
- Machado, J.M.; Masse, M.A.; Karasz, F.E. Anisotropic mechanical properties of uniaxially oriented electrically conducting poly (p-phenylene vinylene). Polymer 1989, 30, 1992–1996. [Google Scholar] [CrossRef]
- Cheng, Z.Y.; Bharti, V.; Xu, T.B.; Xu, H.; Mai, T.; Zhang, Q.M. Electrostrictive poly (vinylidene fluoride-trifluoroethylene) copolymers. Sens. Actuators A Phys. 2001, 90, 138–147. [Google Scholar] [CrossRef]
- Haddou, G.; Dandurand, J.; Dantras, E.; Maiduc, H.; Thai, H.; Giang, N.V.; Trung, T.H.; Ponteins, P.; Lacabanne, C. Mechanical properties of continuous bamboo fiber-reinforced biobased polyamide 11 composites. J. Appl. Polym. Sci. 2019, 136, 47623. [Google Scholar] [CrossRef]
- Youssef, G.; Gupta, V. Dynamic tensile strength of polyurea. J. Mater. Res. 2012, 27, 494. [Google Scholar] [CrossRef]
- Wang, Y.; Zhou, X.; Lin, M.; Zhang, Q.M. High-energy density in aromatic polyurea thin films. Appl. Phys. Lett. 2009, 94, 202905. [Google Scholar] [CrossRef]
- Mohammadi, B.; Yousefi, A.A.; Bellah, S.M. Effect of tensile strain rate and elongation on crystalline structure and piezoelectric properties of PVDF thin films. Polym. Test. 2007, 26, 42–50. [Google Scholar] [CrossRef]
- Engineering & Manufacturing Services. Polyfluor: Breda, The Netherlands. Available online: https://www.polyfluor.nl/en/materials/pvdf/ (accessed on 10 September 2021).
- Paul, B.K.; Kar, S.; Bandyopadhyay, P.; Basu, R.; Das, S.; Bhar, D.S.; Manchanda, R.K.; Khurana, A.; Nayak, D.; Nandy, P. Significant enhancement of dielectric and conducting properties of electroactive polymer polyvinylidene fluoride films: An innovative use of Ferrum metallicum at different concentrations. Indian J. Res. Homoeopath. 2016, 10, 52–58. [Google Scholar]
- Bar-Cohen, Y.; Sherrit, S.; Lih, S.-S. Characterization of the electromechanical properties of EAP materials. In Smart Structures and Materials 2001: Electroactive Polymer Actuators and Devices; International Society for Optics and Photonics: Bellingham, WA, USA, 2001; pp. 319–327. [Google Scholar]
- Brochu, P. Dielectric Elastomers for Actuation and Energy Harvesting; University of California: Los Angeles, CA, USA, 2012. [Google Scholar]
- Peng, H.; Sun, X.; Weng, W.; Fang, X. 5—Energy Harvesting Based on Polymer. In Polymer Materials for Energy and Electronic Applications; Peng, H., Sun, X., Weng, W., Fang, X., Eds.; Academic Press: Cambridge, MA, USA, 2017; pp. 151–196. [Google Scholar]
- Peng, H.; Sun, X.; Weng, W.; Fang, X. Polymer Materials for Energy and Electronic Applications; Academic Press: Cambridge, MA, USA, 2016. [Google Scholar]
- Boczkowska, A.; Leonowicz, M. Intelligent materials for intelligent textiles. Fibres Text. East. Eur. 2006, 14, 13–17. [Google Scholar]
- Vu-Cong, T.; Jean-Mistral, C.; Sylvestre, A.J. Impact of the nature of the compliant electrodes on the dielectric constant of acrylic and silicone electroactive polymers. Smart Mater. Struct. 2012, 21, 105036. [Google Scholar] [CrossRef]
- Kofod, G.; Kornbluh, R.D.; Pelrine, R.; Sommer-Larsen, P. Actuation response of polyacrylate dielectric elastomers. In Smart Structures and Materials 2001: Electroactive Polymer Actuators and Devices; International Society for Optical Engineering: Bellingham, WA, USA, 2001; pp. 141–147. [Google Scholar]
- Wissler, M.; Mazza, E.J.S.; Physical, A.A. Electromechanical coupling in dielectric elastomer actuators. Sens. Actuators A Phys. 2007, 138, 384–393. [Google Scholar] [CrossRef]
- Jean-Mistral, C.; Sylvestre, A.; Basrour, S.; Chaillout, J.J. Dielectric properties of polyacrylate thick films used in sensors and actuators. Smart Mater. Struct. 2010, 19, 075019. [Google Scholar] [CrossRef]
- Gonzalez, D.; Garcia, J.; Newell, B. Electromechanical characterization of a 3D printed dielectric material for dielectric electroactive polymer actuators. Sens. Actuators A Phys. 2019, 297, 111565. [Google Scholar] [CrossRef]
- Li, B.; Chen, H.; Qiang, J.; Hu, S.; Zhu, Z.; Wang, Y. Effect of mechanical pre-stretch on the stabilization of dielectric elastomer actuation. J. Phys. D Appl. Phys. 2011, 44, 155301. [Google Scholar] [CrossRef]
- Choi, H.R.; Jung, K.; Chuc, N.H.; Jung, M.; Koo, I.; Koo, J.; Lee, J.; Lee, J.; Nam, J.; Cho, M. Effects of prestrain on behavior of dielectric elastomer actuator. In Smart Structures and Materials 2005: Electroactive Polymer Actuators and Devices (EAPAD); International Society for Optics and Photonics: Bellingham, WA, USA, 2005; pp. 283–291. [Google Scholar]
- McKay, T.G.; Calius, E.; Anderson, I.A. The dielectric constant of 3M VHB: A parameter in dispute. In Electroactive Polymer Actuators and Devices (EAPAD); International Society for Optics and Photonics: Bellingham, WA, USA, 2009. [Google Scholar]
- Kofod, G.; Sommer-Larsen, P.; Kornbluh, R.; Pelrine, R. Actuation response of polyacrylate dielectric elastomers. J. Intell. Mater. Syst. Struct. 2003, 14, 787–793. [Google Scholar] [CrossRef]
- Fukushima, T.; Asaka, K.; Kosaka, A.; Aida, T. Fully plastic actuator through layer-by-layer casting with ionic-liquid-based bucky gel. Angew. Chem. Int. Ed. 2005, 44, 2410–2413. [Google Scholar] [CrossRef]
- Xiao, J.; Gama, B.; Gillespie Jr, J. An analytical molecular structural mechanics model for the mechanical properties of carbon nanotubes. Int. J. Solids Struct. 2005, 42, 3075–3092. [Google Scholar] [CrossRef]
- Meo, M.; Rossi, M. Prediction of Young’s modulus of single wall carbon nanotubes by molecular-mechanics based finite element modelling. Compos. Sci. Technol. 2006, 66, 1597–1605. [Google Scholar] [CrossRef]
- Yu, M.-F.; Lourie, O.; Dyer, M.J.; Moloni, K.; Kelly, T.F.; Ruoff, R.S. Strength and breaking mechanism of multiwalled carbon nanotubes under tensile load. Science 2000, 287, 637–640. [Google Scholar] [CrossRef] [Green Version]
- Kim, H.-i.; Wang, M.; Lee, S.K.; Kang, J.; Nam, J.-D.; Ci, L.; Suhr, J. Tensile properties of millimeter-long multi-walled carbon nanotubes. Sci. Rep. 2017, 7, 9512. [Google Scholar] [CrossRef]
- Domun, N.; Hadavinia, H.; Zhang, T.; Sainsbury, T.; Liaghat, G.; Vahid, S. Improving the fracture toughness and the strength of epoxy using nanomaterials—A review of the current status. Nanoscale 2015, 7, 10294–10329. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Punning, A.; Kim, K.J.; Palmre, V.; Vidal, F.; Plesse, C.; Festin, N.; Maziz, A.; Asaka, K.; Sugino, T.; Alici, G. Ionic electroactive polymer artificial muscles in space applications. Sci. Rep. 2014, 4, 6913. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Tribology for Scientists and Engineers; Menezes, P.L.; Nosonovsky, M.; Ingole, S.P.; Kailas, S.V.; Lovell, M.R. (Eds.) Tribology for Scientists and Engineers; Springer: New York, NY, USA, 2013. [Google Scholar]
- Mun, S.; Yun, S.; Nam, S.; Park, S.K.; Park, S.; Park, B.J.; Lim, J.M.; Kyung, K.-U. Electro-active polymer based soft tactile interface for wearable devices. IEEE Trans. Haptics 2018, 11, 15–21. [Google Scholar] [CrossRef] [PubMed]
- Lyons, M.E.G. Electroactive Polymer Electrochemistry: Part 1: Fundamentals; Springer Science & Business Media: Berlin, Germany, 2013. [Google Scholar]
- Ahmed, M.; Billah, M.M. Smart material-actuated flexible tendon-based snake robot. Int. J. Adv. Robot. Syst. 2016, 13, 89. [Google Scholar] [CrossRef] [Green Version]
- Jung, K.; Koo, J.C.; Lee, Y.K.; Choi, H.R. Artificial annelid robot driven by soft actuators. Bioinspir. Biomim. 2007, 2, S42. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Hines, L.; Petersen, K.; Lum, G.Z.; Sitti, M. Soft actuators for small-scale robotics. Adv. Mater. 2017, 29, 1603483. [Google Scholar] [CrossRef]
- Bar-Cohen, Y. Bionic: Bionic humans using EAP as artificial muscles reality and challenges. Int. J. Adv. Robot. Syst. 2004, 1, 21. [Google Scholar] [CrossRef]
- Biddiss, E.; Chau, T. Dielectric elastomers as actuators for upper limb prosthetics: Challenges and opportunities. Med. Eng. Phys. 2008, 30, 403–418. [Google Scholar] [CrossRef] [PubMed]
- Hitchcock, R.N.; Humphreys, D.W.; Muir, A.H.; Zarrabi, A. Audio Devices with Electroactive Polymer Actuators Noise Cancellation. Google Patents W02014100573A2, 26 June 2014. [Google Scholar]
- Heydt, R.P.; Pelrine, R.E.; Kornbluh, R.D.; Bonwit, N.A.; Eckerle, J.S. Compliant electroactive polymer transducers for sonic applications. Acoust. Soc. Am. J. 2011, 130, 1078. [Google Scholar] [CrossRef]
- Abbad, A.; Rabenorosoa, K.; Ouisse, M.; Atalla, N. Adaptive Helmholtz resonator based on electroactive polymers: Modeling, characterization, and control. Smart Mater. Struct. 2018, 27, 105029. [Google Scholar] [CrossRef] [Green Version]
- Qiu, Y.; Zhang, E.; Plamthottam, R.; Pei, Q. Dielectric elastomer artificial muscle: Materials innovations and device explorations. Acc. Chem. Res. 2019, 52, 316–325. [Google Scholar] [CrossRef]
- Palumbo, F.; Wen, C.; Lombardo, S.; Pazos, S.; Aguirre, F.; Eizenberg, M.; Hui, F.; Lanza, M. A review on dielectric breakdown in thin dielectrics: Silicon dioxide, high-k, and layered dielectrics. Adv. Funct. Mater. 2020, 30, 1900657. [Google Scholar] [CrossRef]
- Fannir, A.; Temmer, R.; Nguyen, G.T.M.; Cadiergues, L.; Laurent, E.; Madden, J.D.W.; Vidal, F.; Plesse, C. Linear Artificial Muscle Based on Ionic Electroactive Polymer: A Rational Design for Open-Air and Vacuum Actuation. Adv. Mater. Technol. 2019, 4, 1800519. [Google Scholar] [CrossRef]
- Klontzas, M.E.; Akoumianakis, I.D.; Vagios, I.; Karantanas, A.H. MR imaging findings of medial tibial crest friction. Eur. J. Radiol. 2013, 82, e703–e706. [Google Scholar] [CrossRef]
- Ebadi, S.V.; Fashandi, H.; Semnani, D.; Rezaei, B.; Fakhrali, A. Electroactive actuator based on polyurethane nanofibers coated with polypyrrole through electrochemical polymerization: A competent method for developing artificial muscles. Smart Mater. Struct. 2020, 29, 045008. [Google Scholar] [CrossRef]
- McCormick, M.I.; Fakan, E.P.; Nedelec, S.L.; Allan, B.J.M. Effects of boat noise on fish fast-start escape response depend on engine type. Sci. Rep. 2019, 9, 6554. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Sun, Q.; Han, J.; Li, H.; Liu, S.; Shen, S.; Zhang, Y.; Sheng, J. A Miniature Robotic Turtle With Target Tracking and Wireless Charging Systems Based on IPMCs. IEEE Access 2020, 8, 187156–187164. [Google Scholar] [CrossRef]
- Swarrup, J.S.; Ganguli, R.; Madras, G. Studies to improve the actuation capability of low-frequency IPMC actuators for underwater robotic applications. ISSS J. Micro Smart Syst. 2019, 8, 41–47. [Google Scholar] [CrossRef]
- Li, M.; Guo, S.; Guo, J.; Hirata, H.; Ishihara, H. Development of a biomimetic underwater microrobot for a father–son robot system. Microsyst. Technol. 2017, 23, 849–861. [Google Scholar] [CrossRef]
- Rider, T.; Taite, S.; Intel Corp. Wearable adaptive electroactive polymer fabric. United States patent US 10,334,899, 2 July 2019. [Google Scholar]
- Abalyaeva, V.V.; Nikolaeva, G.V.; Dremova, N.N.; Knerel’man, E.I.; Davydova, G.I.; Efimov, O.N.; Ionov, S.G. Electroactive polymer coatings on a modified graphite foil as electrodes for supercapacitors. Prot. Met. Phys. Chem. Surf. 2019, 55, 321–329. [Google Scholar] [CrossRef]
- Ashton, M.D.; Appen, I.C.; Firlak, M.; Stanhope, N.E.; Schmidt, C.E.; Eisenstadt, W.R.; Hur, B.; Hardy, J.G. Wirelessly triggered bioactive molecule delivery from degradable electroactive polymer films. Polym. Int. 2021, 70, 467–474. [Google Scholar] [CrossRef]
- Hardy, J.G.; Mouser, D.J.; Arroyo-Currás, N.; Geissler, S.; Chow, J.K.; Nguy, L.; Kim, J.M.; Schmidt, C.E. Biodegradable electroactive polymers for electrochemically-triggered drug delivery. J. Mater. Chem. B 2014, 2, 6809–6822. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ralls, A.; Kumar, P.; Misra, M.; Menezes, P.L. Material Design and Surface Engineering for Bio-implants. JOM 2020, 72, 684–696. [Google Scholar] [CrossRef]
- Li, X.; Wang, L.; Zhang, Z.; Kong, D.; Ao, X.; Xiao, X. Electroactive High-Temperature Shape Memory Polymers with High Recovery Stress Induced by Ground Carbon Fibers. Macromol. Chem. Phys. 2019, 220, 1900164. [Google Scholar] [CrossRef]
- Zheng, N.; Fang, Z.; Zou, W.; Zhao, Q.; Xie, T. Thermoset shape-memory polyurethane with intrinsic plasticity enabled by transcarbamoylation. Angew. Chem. 2016, 128, 11593–11597. [Google Scholar] [CrossRef]
- Basit, A.; L’Hostis, G.; Durand, B. The recovery properties under load of a shape memory polymer composite material. Materialwissenschaft Werkst. 2019, 50, 1555–1559. [Google Scholar] [CrossRef]
- Peng, B.; Yang, Y.; Gu, K.; Amis, E.J.; Cavicchi, K.A. Digital light processing 3D printing of triple shape memory polymer for sequential shape shifting. ACS Mater. Lett. 2019, 1, 410–417. [Google Scholar] [CrossRef]
- Monwar, M. Nanofiber Fabrication and Applications: Direct Contact Water Desalination & Energy Harvesting. Electronic Theses and Dissertations, Georgia Southern University, Statesboro, GA, USA, 2020. Available online: https://digitalcommons.georgiasouthern.edu/etd/2096 (accessed on 11 July 2021).
- Moretti, G.; Papini, G.P.R.; Righi, M.; Forehand, D.; Ingram, D.; Vertechy, R.; Fontana, M. Resonant wave energy harvester based on dielectric elastomer generator. Smart Mater. Struct. 2018, 27, 035015. [Google Scholar] [CrossRef] [Green Version]
- Yun, S.; Park, S.; Nam, S.; Park, B.; Park, S.K.; Mun, S.; Lim, J.M.; Kyung, K.-U. An electro-active polymer based lens module for dynamically varying focal system. Appl. Phys. Lett. 2016, 109, 141908. [Google Scholar] [CrossRef]
- Qiu, Y. Bistable Electroactive Polymer Material Innovations and Device Explorations; University of California: Los Angeles, CA, USA, 2019. [Google Scholar]
- Xie, Y. Applications of Bistable Electroactive Polymers as Rewritable Photonic Paper, Smart Windows and Wearable Pressure Sensors. Ph.D. Thesis, University of California, Los Angeles, CA, USA, 2019. [Google Scholar]
- Xie, Y.; Meng, Y.; Wang, W.; Zhang, E.; Leng, J.; Pei, Q. Bistable and Reconfigurable Photonic Crystals—Electroactive Shape Memory Polymer Nanocomposite for Ink-Free Rewritable Paper. Adv. Funct. Mater. 2018, 28, 1802430. [Google Scholar] [CrossRef]
- Sikdar, S.; Siddaiah, A.; Menezes, P.L. Conversion of Waste Plastic to Oils for Tribological Applications. Lubricants 2020, 8, 78. [Google Scholar] [CrossRef]
- Qiu, S.; Liu, G.; Li, W.; Zhao, H.; Wang, L. Noncovalent exfoliation of graphene and its multifunctional composite coating with enhanced anticorrosion and tribological performance. J. Alloys Compd. 2018, 747, 60–70. [Google Scholar] [CrossRef]
- Wang, Z.; Gu, P.; Zhang, Z. Indentation and scratch behavior of nano-SiO2/polycarbonate composite coating at the micro/nano-scale. Wear 2010, 269, 21–25. [Google Scholar] [CrossRef]
- Huang, T.; Yeh, J.; Lai, C. Polymer nanocomposite coatings. In Advances in Polymer Nanocomposites; Woodhead Publishing: Sawston, UK, 2012. [Google Scholar]
- John, M.; Kalvala, P.R.; Misra, M.; Menezes, P.L. Peening Techniques for Surface Modification: Processes, Properties and Applications. Materials 2021, 14, 3841. [Google Scholar] [CrossRef] [PubMed]
- Huang, T.-C.; Yeh, L.-C.; Lai, G.-H.; Huang, B.-S.; Yang, T.-I.; Hsu, S.-C.; Lo, A.-Y.; Yeh, J.-M. Advanced superhydrophobic electroactive fluorinated polyimide and its application in anticorrosion coating. Int. J. Green Energy 2017, 14, 113–120. [Google Scholar] [CrossRef]
- Ji, W.F.; Li, C.W.; Yu, S.K.; Chen, P.J.; Chen, H.L.; Chen, R.D.; Chen, B.H.; Hsu, C.L.; Yeh, J.M. Biomimetic electroactive polyimide with rose petal-like surface structure for anticorrosive coating application. Express Polym. Lett. 2017, 11, 635–644. [Google Scholar] [CrossRef]
- Youn, J.-H.; Jeong, S.M.; Hwang, G.; Kim, H.; Hyeon, K.; Park, J.; Kyung, K.-U. Dielectric elastomer actuator for soft robotics applications and challenges. Appl. Sci. 2020, 10, 640. [Google Scholar] [CrossRef] [Green Version]
- Rahman, M.H.; Helal-An-Nahiyan, M.; Rahman, M.M. Design and Simulation of a Robot-Farmer for Gripping and Cutting Crops. In Proceedings of the International Conference on Mechanical, Industrial and Energy Engineering, Khulna, Bangladesh, 25–26 December 2014; pp. ICMIEE-PI-140110-2–ICMIEE-PI-140110-6. [Google Scholar]
- Helal-An-Nahiyan, M.; Rahman, H.; Karim, K.E. Design, Simulation and Mathematical Modeling of a RPR Manipulator for Collecting Waste from Beans. Int. J. Sci. Res. Publ. 2015, 5, 1–6. [Google Scholar]
- Rahman, M.H. Catalytic Co-pyrolysis of Pinewood and Waste Plastics for Improving the Selectivity of Hydrocarbons and the Quality of Pyrolysis Oil; Georgia Southern University: Statesboro, GA, USA, 2020. [Google Scholar]
- Rahman, M.H.; Bhoi, P.R.; Saha, A.; Patil, V.; Adhikari, S. Thermo-catalytic co-pyrolysis of biomass and high-density polyethylene for improving the yield and quality of pyrolysis liquid. Energy 2021, 225, 120231. [Google Scholar] [CrossRef]
- Rahman, M.H.; Bhoi, P.R. An Overview of Non-biodegradable Bioplastics. J. Clean. Prod. 2021, 294, 126218. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Material | Young’s Modulus [GPa] | Stress [MPa] | Strain [%] | Tensile Strength [MPa] | Ref | |
|---|---|---|---|---|---|---|
| 1 | Polypyrrole (PPy) | 5–60 | 30 | 14 | — | [67,69,70,71] |
| 2 | Polyaniline (PANi) | — | — | — | 12.6 | [67,72] |
| 3 | Poly (3,4-ethylenedioxythiophene) (PEDOT) | 1.8–2.6 | 17 | 1 | — | [67,73] |
| 4 | Polythiophene | 3–7 | — | — | — | [74,75] |
| 5 | Polyacetylene | 40–50 | — | — | 900–2100 | [76,77] |
| Silicone-made actuators | 380 | [78] | ||||
| 6 | Polyphenylen viylene (PPV) | 2.3–37 (in the machine direction) 2.3–0.5 (in the transverse direction) | — | — | — | [79] |
| 7 | Piezoelectric P(VDF-TrFE) copolymer | 4 | 6 | 0.15 | — | [80] |
| 8 | Electrostrictive P(VDF-TrFE) | 0.4 | 20 | 5 | — | [80] |
| 9 | Nylon11 (polyamide 11) | 1.2 | — | — | 43.7 ±2.5 | [81] |
| 10 | Polyurea | — | — | — | 93.1 ± 5 | [82,83] |
| 11 | PVDF | 2.5 | 35–50 | [84,85] | ||
| 12 | Nafion (dried) | 0.1316 | 30 | — | 29.3 | [66] |
| 13 | Nafion (Hydrated) | 0.030.4 | 17 | 16.5 | [66] | |
| 14 | Pt IPMC (dried) | 0.1143 | 28 | — | 28.0 | [66] |
| 15 | Pt IPMC (Hydrated) | 0.0412 | 11 | 11.2 | [66] | |
| 16 | Au IPMC (dried) | 0.6026 | 55 | — | 55.7 | [66] |
| 17 | Au IPMC (Hydrated)d | 0.0709 | 21 | 20.8 | [66] | |
| 18 | Pd IPMC (dried) | 0.1416 | 30 | — | 30.1 | [66] |
| 19 | Pd IPMC (Hydrated) | 0.0304 | 15 | 14.7 | [66] | |
| 20 | IL-Pt IPMC | 0.0206 | 13 | — | 11.2 | [66] |
| 21 | Ag IPMC | 0.023–0.139 | 17 | — | — | [68] |
| Cong [92] | Jean-Mistral [92] | Cong [92] | Cong [92] | Li [97] | Choi [98] | McKay [99] | Kofod [100] | Wissler [94] | |
|---|---|---|---|---|---|---|---|---|---|
| Polymer | VHB 4910 | VHB 4910 | VHB 4910 | VHB 4910 | VHB 4910 | VHB 4910 | VHB 4905 | VHB 4910 | VHB 4910 |
| Electrode | Acrylic carbon | Silver grease | Silver grease | Carbon grease | Carbon grease | Carbon grease | Carbon grease | Carbon black + Metal | Gold |
| Sample diameter (m) | 0.016 | 0.016 | 0.016 | 0.016 | 0.010 | 0.010 | 0.030 | 0.030 | 0.025 |
| λ1λ2 = 1 | 4.55 | 5.40 | 5.28 | 5.27 | 4.50 | 4.30 | 4.59 | 4.70 | 4.68 |
| λ1λ2 = 9 | 3.55 | 4.95 | 4.20 | 4.25 | 3.25 | 2.25 | 4.00 | 4.55 | 3.71 |
| λ1λ2 = 16 | 3.50 | 4.60 | 4.25 | 4.30 | 1.75 | 2.50 | 3.75 | 4.50 | 3.34 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Rahman, M.H.; Werth, H.; Goldman, A.; Hida, Y.; Diesner, C.; Lane, L.; Menezes, P.L. Recent Progress on Electroactive Polymers: Synthesis, Properties and Applications. Ceramics 2021, 4, 516-541. https://doi.org/10.3390/ceramics4030038
Rahman MH, Werth H, Goldman A, Hida Y, Diesner C, Lane L, Menezes PL. Recent Progress on Electroactive Polymers: Synthesis, Properties and Applications. Ceramics. 2021; 4(3):516-541. https://doi.org/10.3390/ceramics4030038
Chicago/Turabian StyleRahman, Md Hafizur, Harmony Werth, Alexander Goldman, Yuki Hida, Court Diesner, Logan Lane, and Pradeep L. Menezes. 2021. "Recent Progress on Electroactive Polymers: Synthesis, Properties and Applications" Ceramics 4, no. 3: 516-541. https://doi.org/10.3390/ceramics4030038