Mechatronics: A Study on Its Scientific Constitution and Association with Innovative Products


Abstract
:1. Introduction
2. Mechatronics as a Science
3. Innovation
4. Methods and Data
4.1. STAGE 1—Articles Classification Protocol
4.2. STAGE 2—Bibliometric Analyses
4.3. STAGE 3—Qualitative and Framework Analyses
5. Results
5.1. STAGE 1
5.2. STAGE 2
5.2.1. Co-Occurrence of Keywords
- Red Cluster: the publications are concentrated in the ‘manufacture’ area, especially computer-assisted, using software to control machines and equipment tools related to the manufacturing process, such as Computer Assisted Design CAD) and Computer Assisted Manufacture (CAM). The nodes in the red area with the greatest weight embrace the works of [75,76,77,78] and represent the areas of ‘product design’, ‘mechatronics products’, and ‘product development’. Those nodes are connected to less expressive ones such as ‘software prototypes’, ‘mechatronics product development’, ‘software project management’, and ‘simulators’. Also, in this first cluster, a group of works studies ‘engineering education’, ‘the ‘curricula’ of ‘researchers’ and ‘undergraduate courses’, ‘engineering disciplines’, ‘knowledge acquisition’, and ‘problem-solving’.
- Green cluster; publications such as those of [79,80,81] are examples of the green cluster and are concentrated in the areas of ‘machine design’, ‘actuators’, ‘control system analysis’, ‘sensors’, ‘mathematical models’, integrated circuits’, large-scale systems’, ‘intelligent systems’, ‘robotics systems’ and accident prevention’.
- Blue Cluster: the nodes in the blue cluster are smaller and more scattered, which indicates the lesser incidence of the respective terms in the sample, and they consist mainly of publications in the area of the automobile industry (‘electro-mechanical devices’, ‘automobile manufacture’, ‘suspension’, ‘complex systems’, ‘mechanical actuators’, ‘machine components’, ‘cinematics’) and optimization applications, especially for the automobile sector. Examples of publications are those of [82,83,84].
- Yellow Cluster: in the yellow cluster, the works of [85,86,87] are identified by the terms ‘mechatronics systems’, associated with ‘optimization’, ‘electronic industry’, learning systems’, ‘information technology’, ‘self-optimization’, ‘energy management’, ‘suspension components’, ‘electrical energy’, ‘electronics’ and ‘energy storage’.
- Purple cluster: In the purple cluster, the heaviest node is ‘education’ associated with ‘industrial research’, ‘electrical engineering’, ‘software engineering’, ‘internet’, and other less expressive subtopics, but also in the industrial field as can be seen in the works of [88,89,90]. One of the most expressive nodes of this cluster, whose visualization was suppressed in the best visualization extracted from VOS Viewer, represented in Figure 3, is an educational program.
- Light Blue Cluster: In this cluster, the ‘robotics’ node is central and the weightiest, strongly associated with the term ‘humans’. Another frequently appearing in this cluster is ‘mechatronics devices’, and although smaller nodes do not appear in the figure, they can be observed in the network using node zoom mechanisms in the VOS Viewer. Important exponents of this cluster are the works of [91,92,93].
- Orange Cluster: the orange cluster is the smallest and least expressive. The terms in it are ‘robots’, ‘actuators’, ‘automation’, ‘control’, ‘information management’, ‘laboratories’, ‘mechanics’, ‘mobile robots’, ‘monitoring’, and ‘product development process’. Unlike the term ‘robotics’ in the blue cluster, the term ‘robots’ in the orange cluster expresses those works that address the question of robot development based on case studies such as those of [94,95,96].
5.2.2. Publications in the Area by Year of Publication
5.2.3. Number of Publications per Country
5.2.4. Research Publications with High Citation Numbers
5.2.5. Analysis of the Citation Network of Publications
5.3. STAGE 3
5.3.1. Product Development by Innovation Project
- High quality: the aspect of the quality of the product technologies is present in the publications whose results explain vibration control, the performance of sensors, embedded systems, and vehicles, parameterization of control systems, quality of high-value components used in the aerospace industry, and vehicle safety, being the following publications, examples of the quality aspect [129,130,131,132,133,134].
5.3.2. Product Development by Type of Technology Used (Degree of Project Innovation)
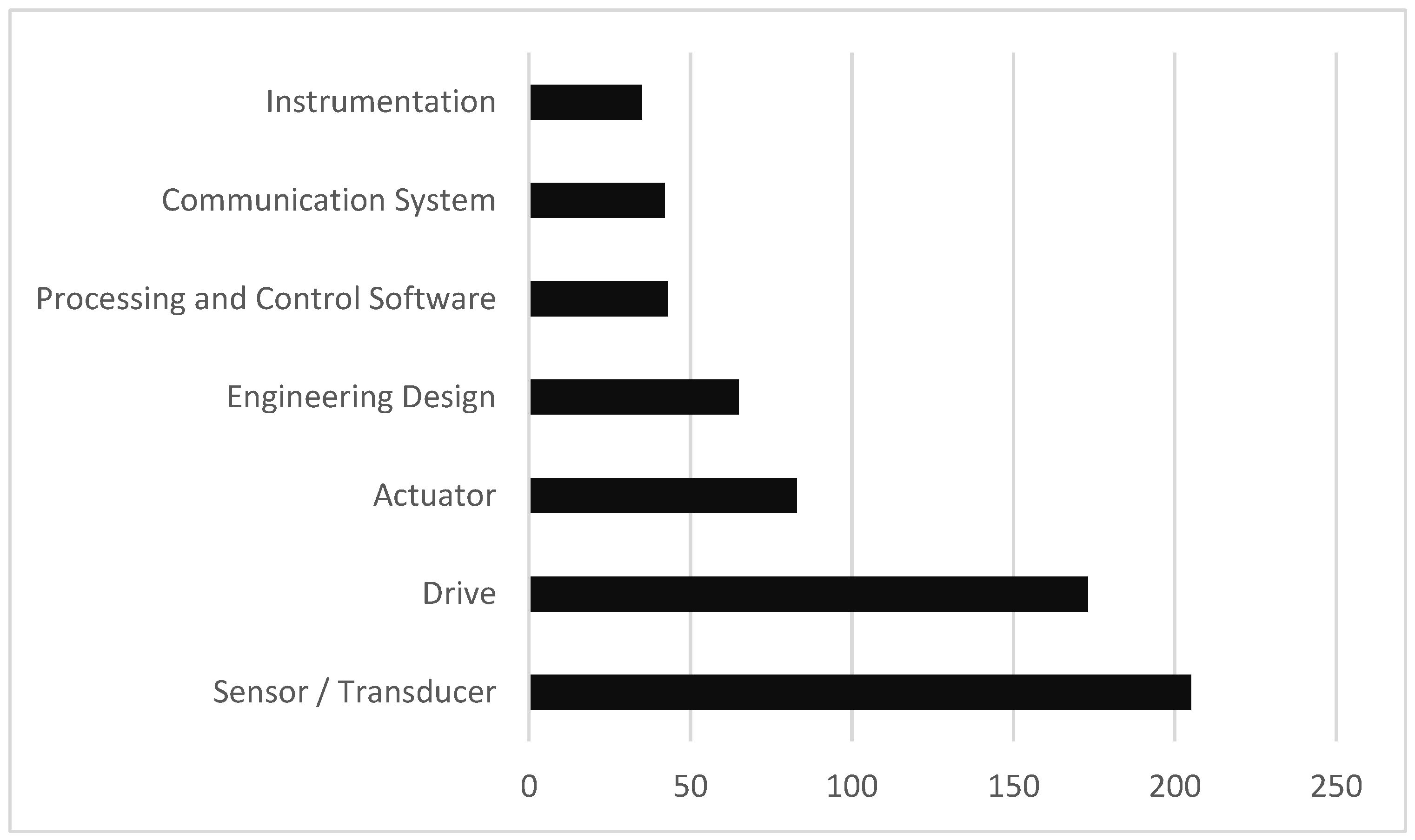
5.3.3. Classification of Publications by Type of Components in a Mechatronic System
5.3.4. Product Development by Degree of Innovation
6. Discussion
7. Conclusions
7.1. Concluding Comments
7.2. Limitations and Future Work
- It is a challenge to differentiate mechatronics from concepts from the lateral areas such as, for example, Industry 4.0, which can provide similar results.
- Future work to advance the field, which is nowadays scarce, must be expanded.
- Scope of publications—working only with articles could offer a more accurate sample related to the publication type. It would also offer the possibility of performing more in-depth bibliometric analyses. We analyzed the area as a whole without restricting the publication type and outlined a general overview. However, we could not go into details and carry out more specific analyses given the high quantity and diverse nature of the publications.
- High number of publications—during the analysis, other levels and variables of analysis were observed regarding the stratification of subjects and attributes of software used, among other possibilities. However, any change requires reanalysis and reading the 246 publications of the qualitative analysis, that was considered not necessary to the scope of this paper.
- Frameworks for qualitative analysis on the subject are little explored—it was difficult to identify qualitative analysis frameworks in the literature to help and support the analysis.
Supplementary Materials
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- De Magalhães, J.L.; Hartz, Z.; Menezes, M.S.; Quoniam, L. Big data and neglected health in dengue, zika and chicungunha: A translational analysis of the triple threat in the 21st century. Inf. Sci. 2016, 45, 235. [Google Scholar]
- Controzzi, M.; Cipriani, C.; Carrozza, M.C. Miniaturized non-actionable mechanism from behind for robotic applications. Mech. Mach. Theory 2010, 45, 1395–1406. [Google Scholar] [CrossRef]
- International Federation of Automatic Control. IFAC. 2020. Available online: https://www.ifac-control.org/ (accessed on 10 January 2023).
- Buur, J. Mechatronics Design in Japan. Ph.D. Thesis, Technical University of Denmark (DTU), Lyngby, Denmark, 1989. [Google Scholar]
- Kodama, F. Alternative Innovation: Innovation through Technological Fusion; Saitama University: Saitama, Japan, 1985. [Google Scholar]
- Hehenberger, P.; Vogel-Heuser, B.; Bradley, D.; Eynard, B.; Tomiyama, T.; Achiche, S. Design, modelling, simulation and integration of cyber physical systems: Methods and applications. Comput. Ind. 2016, 82, 273–289. [Google Scholar] [CrossRef] [Green Version]
- Liliana, D.; Florina, P.S. Education, knowledge and innovation from a mechatronics perspective. Procedia-Soc. Behav. Sci. 2015, 203, 205–209. [Google Scholar] [CrossRef] [Green Version]
- Cronin, B.; Sugimoto, C.R. (Eds.) Beyond Bibliometrics: Harnessing Multidimensional Indicators of Scholarly Impact; MIT Press: Cambridge, MA, USA, 2014. [Google Scholar]
- Van Eck, N.J.; Waltman, L. Software survey: VOS Viewer, a computer program for bibliometric mapping. Scientometrics 2014, 84, 523–538. [Google Scholar] [CrossRef] [Green Version]
- Irschik, H.; Krommer, M.; Nader, M.; Zehetner, C. Mechatronics—The application for innovation. Adv. Sci. Technol. 2009, 56, 1–10. [Google Scholar]
- Nava-Pintor, J.A.; Guerrero-Osuna, H.A.; Luque-Vega, L.F.; Ornelas-Vargas, G.; Lopez-Neri, E.; Carrasco-Navarro, R. Design and Implementation of an Educational Technology Kit Aligned to the Conceptual Framework of Educational Mechatronics. In Proceedings of the 2021 Machine Learning-Driven Digital Technologies for Educational Innovation Workshop, Monterrey, Mexico, 15–17 December 2021; IEEE: Piscataway, NJ, USA, 2021; pp. 1–8. [Google Scholar]
- Gheorghe, G.I.; Elena, I.S.; Veronica, D. Innovative Vectors Mechatronics And Integronics in the Direction of the Development of Education And Research For the Viability of the Labor Market in the Field. Roman. Rev. Precis. Mech. 2011, 39, 90. [Google Scholar]
- Szwarcfiter, C.; Dalcol, P.R.T. Economies of scale and scope: Demystifying some aspects of the transition. Production 1997, 7, 117–129. [Google Scholar] [CrossRef] [Green Version]
- Clark, J.; Guy, K. Innovation and competitiveness: A review: Practitioners’ forum. Technol. Anal. Strateg. Manag. 1998, 10, 363–395. [Google Scholar] [CrossRef]
- Henderson, R.M.; Clark, K.B. Architectural innovation: The reconfiguration of existing product technologies and the failure of established firms. Adm. Sci. Q. 1990, 35, 9–30. [Google Scholar] [CrossRef] [Green Version]
- Schweitzer, P.A. Corrosion Engineering Handbook, 3 Volume Set; CRC Press: Boca Raton, FL, USA, 1996. [Google Scholar]
- Adamowski, J.C.; Furukawa, C.M.; Cozman, F.G. Mechatronics: An approach to industrial automation. Curr. Mechatron. Mag. 2001, 1, 8–11. [Google Scholar]
- Kyura, N.; Oho, H. Mechatronics-an industrial perspective. IEEE ASME Trans. Mechatron. 1996, 1, 10–15. [Google Scholar] [CrossRef]
- Monostori, L.; Márkus, A.; Van Brussel, H.; Westkämpfer, E. Machine learning approaches to manufacturing. CIRP Ann. 1996, 45, 675–712. [Google Scholar] [CrossRef]
- Guvenir, H.A.; Acar, B.; Demiroz, G.; Cekin, A. A supervised machine learning algorithm for arrhythmia analysis. In Proceedings of the Computers in Cardiology, Lund, Sweden, 7–10 September 1997; IEEE: Piscataway, NJ, USA, 1997; pp. 433–436. [Google Scholar]
- Bradley, D. Mechatronics–More questions than answers. Mechatronics 2010, 20, 827–841. [Google Scholar] [CrossRef]
- Bradley, D. What is mechatronics and why teach it? Int. J. Electr. Eng. Educ. 2015, 41, 275–291. [Google Scholar] [CrossRef]
- Bradley, D.A. The what, why and how of mechatronics. Eng. Sci. Educ. J. 1997, 6, 81–88. [Google Scholar] [CrossRef]
- Grimheden, M.E.; Flening, E. 50 years of Mechatronics-what is next? In Proceedings of the 2019 20th International Conference on Research and Education in Mechatronics (REM), Wels, Austria, 23–24 May 2019; IEEE: Piscataway, NJ, USA, 2019; pp. 1–7. [Google Scholar]
- Marzano, G.; Martinovs, A.; Ušča, S. Mechatronics education: Needs and challenges. In Environment Technologies Resources. In Proceedings of the International Scientific and Practical Conference, Moscow, Russia, 7–8 November 2019; Volume 2, pp. 214–217. [Google Scholar]
- Stankovski, S.; Ostojić, G.; Šaponjić, M.; Stanojević, M.; Babić, M. Using micro/mini PLC/PAC in the Edge Computing Architecture. In Proceedings of the 2020 19th International Symposium Infoteh-Jahorina (Infoteh), East Sarajevo, Bosnia and Herzegovina, 18–20 March 2020; IEEE: Piscataway, NJ, USA, 2020; pp. 1–4. [Google Scholar]
- Dehaeze, T.; Bonnefoy, J.; Collette, C. Mechatronics Approach for the Development of a Nano-Active-Stabilization-System. In Proceedings of the 11th International Conference on Mechanical Engineering Design of Synchrotron Radiation Equipment and Instrumentation, Virtual Event, 26–29 July 2021. [Google Scholar]
- Komma, J.L. Mechatronics: The Development, Analysis, and Ground Based-Demonstrations of Robotic Spacecraft Hopping with a Manipulator. Ph.D. Thesis, Naval Postgraduate School, Monterey, CA, USA, 2018. [Google Scholar]
- Schumpeter, J.A. Capitalism, Society and Democracy; Abril Cultural: Sao Paulo, Brazil, 1988. [Google Scholar]
- Carpenter, C.J. A meta-analysis of the effectiveness of health belief model variables in predicting behavior. Health Commun. 2010, 25, 661–669. [Google Scholar] [CrossRef] [Green Version]
- Simonov, A.B.; Rogachev, A.F.; Simonova, I.E. Comparative Study of the Innovative Activity Dynamics in the Russian Federation Using the Singular Spectrum Analysis. In Proceedings of the Conference on Creativity in Intelligent Technologies and Data Science, Volgograd, Russia, 20–23 September 2021; Springer: Cham, Switzerland, 2021; pp. 223–237. [Google Scholar]
- Dziwok, S.; Heinzemann, C.; Tichy, M. Real-time coordination patterns for advanced mechatronic systems. In Proceedings of the International Conference on Coordination Languages and Models, Stockholm, Sweden, 14–15 June 2012; Springer: Berlin/Heidelberg, Germany, 2012; pp. 166–180. [Google Scholar]
- Ziemniak, P.; Stania, M.; Stetter, R. Mechatronics engineering on the example of an innovative production vehicle. In Proceedings of the DS 58–1: Proceedings of ICED 09, the 17th International Conference on Engineering Design, Volume 1, Design Processes, Palo Alto, CA, USA, 24–27 August 2009. [Google Scholar]
- Van der Auweraer, H.; Anthonis, J.; De Bruyne, S.; Leuridan, J. Virtual engineering at work: The challenges for designing mechatronic products. Eng. Comput. 2013, 29, 389–408. [Google Scholar] [CrossRef] [Green Version]
- OECD. Guidelines for Collecting and Interpreting Innovation Data, 3rd ed.; OECD and Eurostat: Paris, France, 2006. [Google Scholar]
- Ettlie, J.E.; Bridges, W.P.; O’keefe, R.D. Organization strategy and structural differences for radical versus incremental innovation. Manag. Sci. 1984, 30, 682–695. [Google Scholar] [CrossRef]
- Zairi, M. Innovation or innovativeness? Results of a benchmarking study. Total Qual. Manag. 1994, 5, 27–44. [Google Scholar] [CrossRef]
- Cooper, J.R. A multidimensional approach to the adoption of innovation. Manag. Decis. 1998, 36, 493–502. [Google Scholar] [CrossRef]
- Christensen, C.M. The Innovation Dilemma: When New Technologies Lead Companies to Failure; M. Books Publisher: Lanham, MD, USA, 2019. [Google Scholar]
- Christensen, C. Patterns in the evolution of product competition. Eur. Manag. J. 1997, 15, 117–127. [Google Scholar] [CrossRef]
- Yoo, Y.; Boland, R.J., Jr.; Lyytinen, K.; Majchrzak, A. Organizing for innovation in the digitized world. Organ. Sci. 2012, 23, 1398–1408. [Google Scholar] [CrossRef]
- Shmeleva, N.; Gamidullaeva, L.; Tolstykh, T.; Lazarenko, D. Challenges and Opportunities for Technology Transfer Networks in the Context of Open Innovation: Russian Experience. J. Open Innov. Technol. Market Complex. 2021, 7, 197. [Google Scholar] [CrossRef]
- Silkina, G.Y.; Shevchenko, S.; Sharapaev, P. Digital innovation in process management. Acad. Strateg. Manag. J. 2021, 20, 1–25. [Google Scholar]
- Vrontis, D.; Christofi, M. R&D internationalization and innovation: A systematic review, integrative framework and future research directions. J. Bus. Res. 2021, 128, 812–823. [Google Scholar]
- Si, S.; Chen, H. A literature review of disruptive innovation: What it is, how it works and where it goes. J. Eng. Technol. Manag. 2020, 56, 101568. [Google Scholar] [CrossRef]
- Gamidullaeva, L. Towards combining the innovation ecosystem concept with intermediary approach to regional innovation development. In MATEC Web of Conferences; EDP Sciences: Les Ulis, France, 2018; Volume 212, p. 09017. [Google Scholar]
- Zhang, C.; Fang, Y.; Chen, X.; Congshan, T. Bibliometric analysis of trends in global sustainable livelihood research. Sustainability 2019, 11, 1150. [Google Scholar] [CrossRef] [Green Version]
- Wang, C.; Lv, S.; Suo, X. The knowledge map of public safety and health. In Proceedings of the IEEE 2015 12th International Conference on Fuzzy Systems and Knowledge Discovery (FSKD), Zhangjiajie, China, 15–17 August 2015; pp. 1688–1692. [Google Scholar]
- Solesbury, W. Sustainable Livelihoods: A Case Study of the Evolution of DFID Policy; Overseas Development Institute: London, UK, 2003. [Google Scholar]
- Otlet, P. El Tratado de Documentación; EDITUM: Zaandam, The Netherlands, 2004; 47p. [Google Scholar]
- White, H.D.; McCain, K.W. Bibliometrics. Annu. Rev. Inf. Sci. Technol. 1989, 24, 119–186.40. [Google Scholar]
- Tague-Sutcliffe, J. Introducción a la informetría. Acimed 1994, 2, 5–62. [Google Scholar]
- Sanchez, Y.R. Trilogy for the scientific vision: Scientific publications, databases and bibliometrics. Biblios Electron. J. Libr. Sci. Arch. Museol. 2008, 31, 3. [Google Scholar]
- Okubo, Y. Bibliometric Indicators and Analysis of Research Systems: Methods and Examples; OECD: Paris, France, 1997. [Google Scholar]
- De Vanz, S.A.S.; Caregnato, S.E. Citation Studies: A Tool to Understand Scientific Communication. Question 2003, 9, 295–307. Available online: http://hdl.handle.net/10183/129317 (accessed on 10 January 2023).
- Patil, R.R.; Kumar, S.; Rani, R.; Agrawal, P.; Pippal, S.K. A Bibliometric and Word Cloud Analysis on the Role of the Internet of Things in Agricultural Plant Disease Detection. Appl. Syst. Innov. 2023, 6, 27. [Google Scholar] [CrossRef]
- Madsen, D.Ø.; Berg, T. An exploratory bibliometric analysis of the birth and emergence of industry 5.0. Appl. Syst. Innov. 2021, 4, 87. [Google Scholar] [CrossRef]
- Sekhar, R.; Sharma, D.; Shah, P. State of the art in metal matrix composites research: A bibliometric analysis. Appl. Syst. Innov. 2021, 4, 86. [Google Scholar] [CrossRef]
- Bernardino, M.C.R.; da Silva Cavalcante, R. Analysis of citations of articles from the journal Information Science in the period 2000–2009. Question 2011, 17, 251–269. [Google Scholar]
- Conner, N.; Provedel, A.; Maciel, E.L.N. Public Science & Health: Analysis of scientific production and collaborative research networks. Ciênc. Saúde Coletiva 2017, 22, 987–996. [Google Scholar]
- Scoton, F.M. Power Laws na Modelagem de Caches de Microprocessadores. Ph.D. Thesis, Universidade de São Paulo, São Paulo, Brazil, 2011. [Google Scholar]
- Haughey, D. Pareto Analysis Step by Step; Project Smart: London, UK, 2010. [Google Scholar]
- Linde, K.; Willich, S.N. How objective are systematic reviews? Differences between reviews on complementary medicine. J. R. Soc. Med. 2003, 96, 17–22. [Google Scholar] [CrossRef] [Green Version]
- Tranfield, D.; Denyer, D.; Smart, P. Towards a methodology for developing evidence-informed management knowledge by means of systematic review. Br. J. Manag. 2003, 14, 207–222. [Google Scholar] [CrossRef]
- Sampaio, R.F.; Mancini, M.C. Systematic review studies: A guide to judicious synthesis of scientific evidence. Braz. J. Phys. Ther. 2007, 11, 83–89. [Google Scholar] [CrossRef]
- Wheelwright, S.C.; Clark, K.B. Revolutionizing Product Development: Quantum Leaps in Speed, Efficiency, and Quality; Simon and Schuster: New York, NY, USA, 1992. [Google Scholar]
- Utterback, J. Mastering the Dynamics of Innovation: How Companies Can Seize Opportunities in the Face of Technological Change. University of Illinois at Urbana-Champaign’s Academy for Entrepreneurial Leadership Historical Research Reference in Entrepreneurship. 1994. Available online: https://ssrn.com/abstract=1496178 (accessed on 10 January 2023).
- Barbalho, S.C. Reference Model for the Development of Mechatronic Products: Proposal and Applications; USP: São Carlos, Brazil, 2006; 275p. [Google Scholar]
- Clark, K.B.; Fujimoto, T. Heavyweight product managers. McKinsey Q. 1991, 1, 42–60. [Google Scholar]
- Ulrich, K.T.; Eppinger, S.D. Design for Manufacturing. In Product Design and Development; Mcgraw Hill Inc.: New York, NY, USA, 1995; pp. 180–216. [Google Scholar]
- Clausing, D.P. Total quality development. Mech. Eng.-CIME 1994, 116, 94–97. [Google Scholar]
- Pugh, S. Total Design: Integrated Methods for Successful Product Engineering; Addison Wesley: London, UK, 1996. [Google Scholar]
- Bradley, D.A. Mechatronics: Electronics in Products and Processes; Chapman and Hall: London, UK, 1991. [Google Scholar]
- Freiberger, S.; Albrecht, M.; Käufl, J. Reverse engineering technologies for remanufacturing of automotive systems communicating via CAN bus. J. Remanuf. 2011, 1, 6. [Google Scholar] [CrossRef] [Green Version]
- Massa, B.; Roccella, S.; Carrozza, M.C.; Dario, P. Design and development of an underactuated prosthetic hand. In Proceedings of the 2002 IEEE International Conference on Robotics and Automation (Cat. No. 02CH37292), Washington, DC, USA, 11–15 May 2002; IEEE: Piscataway, NJ, USA, 2002; Volume 4, pp. 3374–3379. [Google Scholar]
- Bracewell, R.H.; Sharpe, J.E.E. Functional descriptions used in computer support for qualitative scheme generation. “Schemebuilder”. Ai Edam 1996, 10, 333–345. [Google Scholar] [CrossRef] [Green Version]
- Grebenstein, M.; Chalon, M.; Hirzinger, G.; Siegwart, R. Antagonistically driven finger design for the anthropomorphic DLR hand arm system. In Proceedings of the 2010 10th IEEE-RAS International Conference on Humanoid Robots, Nashville, TN, USA, 6–8 December 2010; pp. 609–616. [Google Scholar]
- Gouaillier, D.; Hugel, V.; Blazevic, P.; Kilner, C.; Monceaux, J.; Lafourcade, P.; Marnier, B.; Serre, J.; Maisonnier, B. Mechatronic design of NAO humanoid. In Proceedings of the 2009 IEEE International Conference on Robotics and Automation, Kobe, Japan, 12–17 May 2009; pp. 769–774. [Google Scholar]
- Wu, Z.; Yu, J.; Yuan, J.; Tan, M.; Zhang, J. Mechatronic design and implementation of a new robotic glider dolphin. In Proceedings of the 2015, IEEE International Conference on Robotics and Biomimetics (ROBIO), Zhuhai, China, 6–9 December 2015; IEEE: Piscataway, NJ, USA, 2015; pp. 267–272. [Google Scholar]
- Aggogeri, F.; Al-Bender, F.; Brunner, B.; Elsaid, M.; Mazzola, M.; Merlo, A.; Ricciardi, D.; de la O Rodriguez, M.; Salvi, E. Design of piezo-based AVC system for machine tool applications. Mech. Syst. Signal Process. 2013, 36, 53–65. [Google Scholar] [CrossRef]
- Sitte, J.; Winzer, P. Methodic design of robot vision systems. In Proceedings of the 2007 International Conference on Mechatronics and Automation, Harbin, China, 5–8 August 2007; pp. 1758–1763. [Google Scholar]
- Felicetti, R.; Ramesohl, I. Design of a mass-production low-cost claw-pole motor for an automotive application. COMPEL Int. J. Comput. Math. Electr. Electron. Eng. 2003, 22, 937–952. [Google Scholar] [CrossRef]
- Casner, D.; Renaud, J.; Houssin, R.; Knittel, D. A novel design approach for mechatronic systems based on multidisciplinary design optimization. In Proceedings of the ICAM 2012: International Conference on Automation and Mechatronics (hal-00842097), Chengdu, China, 5–8 August 2012; pp. 1360–1364. [Google Scholar]
- Castagnetti, D.; Bertacchini, A.; Spaggiari, A.; Lesnjanin, A.; Larcher, L.; Dragoni, E.; Arduini, M. A novel ball joint wear sensor for low-cost structural health monitoring of off-highway vehicles. Mech. Ind. 2015, 16, 507. [Google Scholar] [CrossRef] [Green Version]
- Sell, R.; Seiler, S. Mechatronics Modeling Methodology and Semantic Orientated Knowledge Base. In Proceedings of the 20th International DAAAM Symposium, Vienna, Austria, 25–28 November 2009. [Google Scholar]
- Isermann, R. Mechatronic Systems: Fundamentals; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2007. [Google Scholar]
- Jänker, P.; Christmann, M.; Hermle, F.; Lorkowski, T.; Storm, S. Mechatronics using piezoelectric actuators. J. Eur. Ceram. Soc. 1999, 19, 1127–1131. [Google Scholar] [CrossRef]
- Chau, K.T.; Wang, Z. Chaos in Electric Drive Systems: Analysis, Control and Application; John Wiley & Sons: Hoboken, NJ, USA, 2011. [Google Scholar]
- Nattermann, R.; Anderl, R. Approach for a Data-Managmenet-System and a Proceeding-Model for the Development of Adaptronic Systems. In Proceedings of the ASME 2010 International Mechanical Engineering Congress and Exposition, Vancouver, BC, Canada, 12–18 November 2010; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2010; pp. 379–387. [Google Scholar]
- Marian, N.; Top, S. Integration of simulink models with component-based software models. Adv. Electr. Comput. Eng. 2008, 2, 3–10. [Google Scholar] [CrossRef]
- Colizzi, L.; Laneve, L.; Savino, N.; Martini, A.; Potenza, A.; Cirillo, P.; Pignolo, L.; Dolce, G. Aramis: A “virtua-mechatronic” approach for neuro-rehabilitation purposes. In Proceedings of the 10th IEEE International Conference on Information Technology and Applications in Biomedicine, Corfu, Greece, 3–5 November 2010; pp. 1–4. [Google Scholar]
- Zazzarini, C.C.; Patete, P.; Baroni, G.; Cerveri, P. Mechatronic design of a fully integrated camera for mini-invasive surgery. IEEE Trans. Biomed. Eng. 2013, 60, 1538–1545. [Google Scholar] [CrossRef]
- Szekely, I.; Stoianovici, V.C.; Machedon, M.; Nedelcu, A. Wireless neural signal transmission in biomedical prosthetic systems. In Proceedings of the 2009 15th International Symposium for Design and Technology of Electronics Packages (SIITME), Gyula, Hungary, 17–20 September 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 63–68. [Google Scholar]
- Tomatis, N.; Brega, R.; Arras, K.; Jensen, B.; Moreau, B.; Persson, J.; Siegwart, R. A complex mechatronic system: From design to application. In Proceedings of the 2001 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Proceedings (Cat. No. 01TH8556), Como, Italy, 8–12 July 2001; IEEE: Piscataway, NJ, USA, 2001; Volume 1, pp. 278–283. [Google Scholar]
- Fang, Z.; Fu, Y.; Chai, T. A low-cost modular robot for research and education of control systems, mechatronics and robotics. In Proceedings of the 2009 4th IEEE Conference on Industrial Electronics and Applications, Xi’an, China, 25–27 May 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2828–2833. [Google Scholar]
- Lima, E.J.; Bomfim, M.H.S.; de Miranda Mourão, M.A. POLIBOT–POwer Lines Inspection RoBOT. Ind. Robot Int. J. 2018, 45, 98–109. [Google Scholar] [CrossRef]
- Leão, M.L. Engineering Teaching at the Coming of the 21st Century. In Proceedings of the XXVII Brazilian Congress on Engineering Education, Natal, razil, 12–15 September 1999; pp. 901–908. [Google Scholar]
- Fan, Z.; Detlef, M.; Andreasen, M.M.; Hein, L. Teaching system integration of mechatronic systems. In Proceedings of the DS 36: Proceedings DESIGN 2006, the 9th International Design Conference, Dubrovnik, Croatia, 15–18 May 2006; pp. 1133–1142. [Google Scholar]
- Krishnan, M.; Das, S.; Yost, S.A. Team-oriented, project-based instruction in a new mechatronics course. In Proceedings of the FIE’99 Frontiers in Education, 29th Annual Frontiers in Education Conference. Designing the Future of Science and Engineering Education, Conference Proceedings (IEEE Cat. No. 99CH37011), San Juan, PR, USA, 10–13 November 1999; IEEE: Piscataway, NJ, USA, 1999; Volume 3, p. 13D4-1. [Google Scholar]
- Habib, M.K. Mechatronics engineering the evolution, the needs and the challenges. In Proceedings of the IECON 2006–32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 4510–4515. [Google Scholar]
- Lyshevski, S.E. Mechatronic curriculum–retrospect and prospect. Mechatronics 2002, 12, 195–205. [Google Scholar] [CrossRef]
- Hsu, T.R. Development of an undergraduate curriculum in mechatronics systems engineering. J. Eng. Educ. 1999, 88, 173–179. [Google Scholar] [CrossRef]
- Ume, C.; Timmerman, M. Mechatronics instruction in the Mechanical Engineering curriculum at Georgia Tech. Mechatronics 1995, 5, 723–741. [Google Scholar] [CrossRef]
- Hargrove, J.B. Curriculum, equipment and student project outcomes for mechatronics education in the core mechanical engineering program at Kettering University. Mechatronics 2002, 12, 343–356. [Google Scholar] [CrossRef]
- Rizzoni, G.; Keyhani, A. Design of mechatronic systems: An integrated inter-departmental curriculum. Mechatronics 1995, 5, 845–853. [Google Scholar] [CrossRef]
- Palli, G.; Melchiorri, C.; Vassura, G.; Scarcia, U.; Moriello, L.; Berselli, G.; Cavallo, A.; De Maria, G.; Natale, C.; Pirozzi, S.; et al. The DEXMART hand: Mechatronic design and experimental evaluation of synergy-based control for human-like grasping. Int. J. Robot. Res. 2014, 33, 799–824. [Google Scholar] [CrossRef]
- Costantino, N.; Serventi, R.; Tinfena, F.; D’Abramo, P.; Chassard, P.; Tisserand, P.; Saponara, S.; Fanucci, L. Design and test of an HV-CMOS intelligent power switch with integrated protections and self-diagnostic for harsh automotive applications. IEEE Trans. Ind. Electron. 2011, 58, 2715–2727. [Google Scholar] [CrossRef]
- Palli, G.; Pirozzi, S.; Natale, C.; De Maria, G.; Melchiorri, C. Mechatronic design of innovative robot hands: Integration and control issues. In Proceedings of the 2013 IEEE/ASME International Conference on Advanced Intelligent Mechatronics, Wollongong, Australia, 9–12 July 2013; pp. 1755–1760. [Google Scholar]
- Palli, G.; Pirozzi, S. A miniaturized optical force sensor for tendon-driven mechatronic systems: Design and experimental evaluation. Mechatronics 2012, 22, 1097–1111. [Google Scholar] [CrossRef]
- Zhao, D.; Strotmann, A. Analysis and visualization of citation networks. Synth. Lect. Inf. Concept. Retr. Serv. 2015, 7, 1–207. [Google Scholar]
- Pilkington, A.; Meredith, J. The evolution of the intellectual structure of operations management—1980–2006: A citation/co-citation analysis. J. Oper. Manag. 2009, 27, 185–202. [Google Scholar] [CrossRef]
- Isermann, R. Mechatronic systems. Innovative products with embedded control. Control Eng. Pract. 2008, 16, 14–29. [Google Scholar] [CrossRef]
- Grácio, M.C.C. Bibliographic coupling and co-citation analysis: Theoretical-conceptual review. Bibli Meet. Electron. J. Libr. Inf. Sci. 2016, 21, 82–99. [Google Scholar]
- Bayer, A.E.; Smart, J.C.; McLaughlin, G.W. Mapping intellectual structure of a scientific subfield through author cocitations. J. Am. Soc. Inf. Sci. 1990, 41, 444. [Google Scholar] [CrossRef]
- Small, H. Co-citation in the scientific literature: A new measure of the relationship between two documents. J. Am. Soc. Inf. Sci. 1973, 24, 265–269. [Google Scholar] [CrossRef]
- Small, H.; Sweeney, E. Clustering the science citation index® using co-citations: I. A comparison of methods. Scientometrics 1985, 7, 391–409. [Google Scholar] [CrossRef]
- Small, H. On the shoulders of Robert Merton: Towards a normative theory of citation. Scientometrics 2004, 60, 71–79. [Google Scholar] [CrossRef]
- Giberti, H.; Cinquemani, S.; Legnani, G. A practical approach to the selection of the motor-reducer unit in electric drive systems. Mech. Based Des. Struct. Mach. 2011, 39, 303–319. [Google Scholar] [CrossRef]
- Lyshevski, S.E. Nonlinear control of mechatronic systems with permanent-magnet DC motors. Mechatronics 1999, 9, 539–552. [Google Scholar] [CrossRef]
- Merzouki, R.; Samantaray, A.K.; Pathak, P.M.; Bouamama, B.O. Intelligent Mechatronic Systems: Modeling, Control and Diagnosis; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2012. [Google Scholar]
- Goth, C.; Putzo, S.; Franke, J. Aerosol Jet printing on rapid prototyping materials for fine pitch electronic applications. In Proceedings of the 2011 IEEE 61st Electronic Components and Technology Conference (ECTC), Lake Buena Vista, FL, USA, 31 May–3 June 2011; pp. 1211–1216. [Google Scholar]
- Huck, T.; Schirmer, J.; Hogenmuller, T.; Dostert, K. Tutorial about the implementation of a vehicular high speed communication system. In Proceedings of the International Symposium on Power Line Communications and Its Applications, Vancouver, BC, Canada, 6–8 April 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 162–166. [Google Scholar]
- Scholten, J.H.; Teule, J.M.; Zafiropulos, V.; Heeren, R.M.A. Controlled laser cleaning of painted artworks using accurate beam manipulation and on-line LIBS-detection. J. Cult. Herit. 2000, 1, S215–S220. [Google Scholar] [CrossRef]
- Lastra, J.L.M.; Colombo, A.W. Engineering framework for agent-based manufacturing control. Eng. Appl. Artif. Intell. 2006, 19, 625–640. [Google Scholar] [CrossRef]
- Li, K.; Zeng, D.W.; Yung, K.C.; Chan, H.L.W.; Choy, C.L. Study o n ceramic/polymer composite fabricated by laser cutting. Mater. Chem. Phys. 2002, 75, 147–150. [Google Scholar] [CrossRef]
- Vougioukas, S.; Papamichail, D.; Georgiou, P.; Papadimos, D. River discharge monitoring using a vertically moving side-looking acoustic Doppler profiler. Comput. Electron. Agric. 2011, 79, 137–141. [Google Scholar] [CrossRef]
- Maréchal, L.; Barthod, C.; Goujon, L.; Büssing, T. Design and development of a mechatronic infant torso simulator for respiratory physiotherapy learning. Mechatronics 2012, 22, 55–64. [Google Scholar] [CrossRef]
- Shen, Q.; Grafe, M. To support multidisciplinary communication in VR-based virtual prototyping of mechatronic systems. Adv. Eng. Inform. 2007, 21, 201–209. [Google Scholar] [CrossRef]
- Eichberger, A.; Wallner, D. Review of recent patents in integrated vehicle safety, advanced driver assistance systems and intelligent transportation systems. Recent Pat. Mech. Eng. 2010, 3, 32–44. [Google Scholar]
- Matamoros-Sanchez, A.Z.; Goodall, R.M. Novel mechatronic solutions incorporating inerters for railway vehicle vertical secondary suspensions. Veh. Syst. Dyn. 2015, 53, 113–136. [Google Scholar] [CrossRef] [Green Version]
- Carpanzano, E.; Cesta, A.; Orlandini, A.; Rasconi, R.; Valente, A. Políticas inteligentes de roteamento dinâmico de peças em sistemas de transporte reconfiguráveis, plug & produzem. CIRP Ann. 2014, 63, 425–428. [Google Scholar]
- Zaeh, M.F.; Hennauer, M. Prediction of the dynamic behaviour of machine tools during the design process using mechatronic simulation models based on finite element analysis. Prod. Eng. 2011, 5, 315. [Google Scholar] [CrossRef]
- Kalt, E.; Monfared, R.; Jackson, M.; Bointon, S.N.P.; Leach, R. Development of an intelligent automated polishing system. In Proceedings of the 16th International Conference of the European Society for Precision Engineering and Nanotechnology (EUSPEN), Nottingham, UK, 30 May–3 June 2016. [Google Scholar]
- Aggogeri, F.; Borboni, A.; Pellegrini, N. Jerk trajectory planning for assistive and rehabilitative mechatronic devices. Int. Rev. Mech. Eng. 2016, 10, 543–551. [Google Scholar] [CrossRef]
- Sanderson, A.C.; de Mello, L.S.H.; Zhang, H. Assembly sequence planning. AI Mag. 1990, 11, 62. [Google Scholar]
- Pignolo, L.; Dolce, G.; Basta, G.; Lucca, L.F.; Serra, S.; Sannita, W.G. Rehabilitation of upper limbs after stroke: ARAMIS is an innovative “robo-mechatronic” approach and prototype. In Proceedings of the 2012, 4th IEEE RAS & EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), Rome, Italy, 24–27 June 2012; IEEE: Piscataway, NJ, USA, 2012; pp. 1410–1414. [Google Scholar]
- Shaowei, F.; Yiwei, L.; Liu, H. Research on the mechanics of the HIT/DLR Hand II anthropomorphic five-finger dexterous hand. J. Harbin Eng. Univ. 2009, 20, 171–177. [Google Scholar]
- Bellini, A.; Colli, M.; Dragoni, E. Mechatronic design of a shape memory alloy actuator for automotive tumble flaps: A case study. IEEE Trans. Ind. Electron. 2009, 56, 2644–2656. [Google Scholar] [CrossRef]
- Zgodavova, K.; Lengyel, L.; Golemanov, L.A. Contribution to the Research and Education of Innovation Engineering and New Product Development at the University. In Innovative Techniques in Instruction Technology, E-learning, E-Assessment and Education; Springer: Dordrecht, The Netherlands, 2008; pp. 261–267. [Google Scholar]
- Ackerley, R.; Borich, M.; Oddo, C.M.; Ionta, S. Insights and perspectives on sensory-motor integration and rehabilitation. Multisens. Res. 2016, 29, 607–633. [Google Scholar] [CrossRef] [Green Version]
- Nandikolla, V.; Shadle, S.; Pyke, P.; Gardner, J.; Grover, R.; Pharkute, S. Real-world industry collaboration within a mechatronics class. In Proceedings of the 2008 38th Annual Frontiers in Education Conference, Saratoga Springs, NY, USA, 22–25 October 2008; IEEE: Piscataway, NJ, USA, 2008; p. F3A-14. [Google Scholar]
- Najeh, L.M.; Ala, B.A.L.T.I. The Need for System Approach and Mechatronics for Agricultural Applications. J. Comput. Sci. Control Syst. 2021, 14, 26–29. [Google Scholar]
- Eaton, R.; Katupitiya, J.; Siew, K.W.; Howarth, B. Autonomous farming: Modelling and control of agricultural machinery in a unified framework. Int. J. Intell. Syst. Technol. Appl. 2010, 8, 444–457. [Google Scholar]
- Heinle, C.; Vetter, M.; Ehrenstein, G.W.; Drummer, D. Assembly Molding of Tight Mechatronic System-A Model Approach. J. Manuf. Sci. Eng. 2010, 132, 054505-1–054505-4. [Google Scholar] [CrossRef]
- Pekkeriet, E.J.; Van Henten, E.J.; Campen, J.B. Contribution of innovative technologies to new developments in horticulture. Acta Horticult. 2015, 1099, 45–54. [Google Scholar] [CrossRef]
- Neubert, S.; Roddelkopf, T.; Al-Okby, M.F.R.; Junginger, S.; Thurow, K. Flexible IoT Gas Sensor Node for Automated Life Science Environments Using Stationary and Mobile Robots. Sensors 2021, 21, 7347. [Google Scholar] [CrossRef]
- Diftler, M.A.; Mehling, J.S.; Abdallah, M.E.; Radford, N.A.; Bridgwater, L.B.; Sanders, A.M.; Askew, R.S.; Linn, D.M.; Yamokoski, J.D.; Permenter, F.A.; et al. Robonaut 2-the first humanoid robot in space. In Proceedings of the 2011 IEEE International Conference on Robotics and Automation, Shanghai, China, 9–13 May 2011; pp. 2178–2183. [Google Scholar]
- Luecke, G.R. “Muscletronics”-teaching mechatronics with fluid power systems. In Proceedings of the 1999 IEEE/ASME International Conference on Advanced Intelligent Mechatronics (Cat. No. 99TH8399), Atlanta, GA, USA, 19–23 September 1999; IEEE: Piscataway, NJ, USA, 1999; pp. 466–471. [Google Scholar]
- Brunhaver, S.; Lande, M.; Sheppard, S.D.; Carryer, J.E. Fostering an enterprising learning ecology for engineers. Int. J. Eng. Educ. 2012, 28, 355–363. [Google Scholar]
- Chiou, R.; Mauk, M.; Danley, W.; Kizirian, R.; Yang, Y.T.; Kwon, Y. Innovative Engineering Technology Curriculum Integrated with Web-based Technology in Robotics, Mechatronics, and E-quality. In Proceedings of the ASME 2009 International Mechanical Engineering Congress and Exposition, Lake Buena Vista, FL, USA, 13–19 November 2009; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2009; pp. 369–376. [Google Scholar]
- Sorouri, M.; Vyatkin, V.; Salcic, Z. MIRA: Enabler of mass customization through agent-based development of intelligent manufacturing systems. In Proceedings of the 2014 IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 31 May–5 June 2014; pp. 258–263. [Google Scholar]
- Essomba, T.; Nouaille, L.; Laribi, M.A.; Poisson, G.; Zeghloul, S. Design process of a robotized tele-echography system. In Applied Mechanics and Materials; Trans Tech Publications Ltd.: Bäch, Switzerland, 2012; Volume 162, pp. 384–393. [Google Scholar]
- Seyedhosseini, S.; Keyghobadi, A. An integrated model for mechatronic products in agile manufacturing system. Decis. Sci. Lett. 2014, 3, 535–550. [Google Scholar] [CrossRef]
- Zhu, F.; Wigh, A.; Friedrich, T.; Devaux, A.; Bony, S.; Nugegoda, D.; Kaslin, J.; Wlodkowic, D. Automated lab-on-a-chip technology for fish embryo toxicity tests performed under continuous microperfusion (μFET). Environ. Sci. Technol. 2015, 49, 14570–14578. [Google Scholar] [CrossRef] [PubMed]
- Joeckel, A.; Loewenstein, L.; Wangelin, F.V.; Hoffmann, T.; Teichmann, M. Syntegra—Innovativer Prototyp Einer Nächsten Triebfahrwerk-Generation. In Proceedings of the Internationaler ETG-Kongress 2007, Karlsruhe, Germany, 23–24 October 2007. [Google Scholar]
- Stein, E.; Valdiero, C.; Hubert, M.A.; Goergen, R.; Souza, M.; Rasia, L.A.; Valdiero, A.C. Development of an Automatic Machine for Sensor Manufacturing by the GOP Technique. In Proceedings of the IDEAS 2019: The Interdisciplinary Conference on Innovation, Design, Entrepreneurship, and Sustainable Systems, Athens, Greece, 10–12 June 2019; Springer International Publishing: Cham, Switzerland, 2020; pp. 239–247. [Google Scholar]
- Balderas, D.; Molina, A.; Ponce, P. Alternative classification techniques for brain-computer interfaces for smart sensor manufacturing environments. IFAC-PapersOnLine 2015, 48, 680–685. [Google Scholar] [CrossRef]
- Pellicciari, M.; Andrisano, A.O.; Leali, F.; Vergnano, A. Engineering method for adaptive manufacturing systems design. Int. J. Interact. Des. Manuf. IJIDeM 2009, 3, 81–91. [Google Scholar] [CrossRef]
- Schöner, H.P. Automotive mechatronics. Control Eng. Pract. 2004, 12, 1343–1351. [Google Scholar] [CrossRef]
- Aboud, W.S.; Haris, S.M.; Yaacob, Y. Advances in the control of mechatronic suspension systems. J. Zhejiang Univ. Sci. C 2014, 15, 848–860. [Google Scholar] [CrossRef]
- Akdogan, E.; Topuz, V.E.D.A.T.; Akbas, A. An education tool study on mechatronics: Emulation of stepper motor driving systems by using a microcontroller based system interface. In Proceedings of the IEEE International Conference on Mechatronics (ICM’04), Istanbul, Turkey, 5 June 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 509–512. [Google Scholar]
- Spark, I.J.; yousef Ibrahim, M. Cooperative redundant steering/drive system: Mechatronics correction for slip angles and longitudinal slip. In Proceedings of the 2006 IEEE International Symposium on Industrial Electronics, Montreal, QC, Canada, 9–13 July 2006; Volume 4, pp. 3026–3031. [Google Scholar]
- Ilyukhin, Y.V.; Poduraev, Y.V.; Tatarintseva, A.V. Nonlinear adaptive correction of continuous path speed of the tool for high efficiency robotic machining. Procedia Eng. 2015, 100, 994–1002. [Google Scholar] [CrossRef] [Green Version]
- Szabo, L.; Popa, D.C.; Iancu, V.; Kovacs, E.; Toth, F. On the Usefulness of Simulation in Designing a Permanent Magnet Modular Surface Motor for Advanced Mechatronic Systems. In Proceedings of the 2006 IEEE International Conference on Mechatronics, Budapest, Hungary, 3–5 July 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 88–93. [Google Scholar]
- Cheng, M.; Zhang, J.; Xu, B.; Ding, R.; Wei, J. Decoupling compensation for damping improvement of the electrohydraulic control system with multiple actuators. IEEE/ASME Trans. Mechatron. 2018, 23, 1383–1392. [Google Scholar] [CrossRef]
- Brezina, T.; Hadas, Z.; Vetiska, J. Using of Co-simulation ADAMS-SIMULINK for development of mechatronic systems. In Proceedings of the 14th International Conference Mechatronika, Trencianske Teplice, Slovakia, 1–3 June 2011; IEEE: Piscataway, NJ, USA, 2011; pp. 59–64. [Google Scholar]
- Valasek, M. Design and control of under-actuated and over-actuated mechanical systems-challenges of mechanics and mechatronics. In Computational Mechanics in Vehicle System Dynamics, Proceedings of the 5th World Congress on Computational Mechanics, Vienna, Austria, 7–12 July 2002; Supplement to Vehicle System Dynamics; Taylor & Francis: London, UK, 2002; pp. 37–49. [Google Scholar]
- Lubbe, A.J.; Kluge, P. Development and Testing of a Wireless Controlled Car Using the Internet as Communication Medium. S. Afr. J. Ind. Eng. 2008, 19, 137–147. Available online: https://hdl.handle.net/10520/EJC46165 (accessed on 10 January 2023). [CrossRef]
- Colli, M.; Dragoni, E.; Bellato, N. System Design of a Shape Memory Alloy Actuator for Automotive Tumble Flaps (No. 2006-01-3424); SAE Technical Paper; SAE International: Warrendale, PN, USA, 2006. [Google Scholar]
- Wingert, A.; Lichter, M.D.; Dubowsky, S. On the design of large degree-of-freedom digital mechatronic devices based on bistable dielectric elastomer actuators. IEEE/ASME Trans. Mechatron. 2006, 11, 448–456. [Google Scholar] [CrossRef] [Green Version]
- Di Gaeta, A.; Glielmo, L.; Giglio, V.; Police, G. Modeling of an Electromechanical Engine Valve Actuator Based on a Hybrid Analytical--FEM Approach. IEEE/ASME Trans. Mechatron. 2008, 13, 625–637. [Google Scholar] [CrossRef]
- Chandrasekaran, K.; Thondiyath, A. Design of a two degree-of-freedom compliant tool tip for a handheld powered surgical tool. J. Med. Devices 2017, 11, 014502. [Google Scholar] [CrossRef]
- Chen, D.; Li, X.; Li, Z.; Wang, T. A Mechatronics Control Engineering Class at Beihang University, China: Practicing and Exploring. Mechatronics 2012, 22, 881–889. [Google Scholar] [CrossRef]
- Yudin, A.; Vlasov, A.; Salmina, M.; Sukhotskiy, V. Challenging intensive project-based education: Short-term class on mobile robotics with mechatronic elements. In Robotics in Education: Methods and Applications for Teaching and Learning; Springer International Publishing: Berlin/Heidelberg, Germany, 2019; pp. 79–84. [Google Scholar]
- Janthong, N.; Brissaud, D.; Butdee, S. Combining Axiomatic Design and Case-Based Reasoning in a Design Methodology of Mechatronics Products. In Proceedings of the 19th CIRP Design Conference–Competitive Design, Cranfield, UK, 30–31 March 2009; Cranfield University Press: Bedford, UK, 2009. Available online: http://hdl.handle.net/1826/3665 (accessed on 20 February 2023).
- Froyd, J.E.; Wankat, P.C.; Smith, K.A. Five major shifts in 100 years of engineering education. Proc. IEEE 2012, 100, 1344–1360. [Google Scholar] [CrossRef]
- Koniar, D.; Hargas, L.; Simonova, A.; Hrianka, M.; Loncova, Z. Virtual instrumentation for visual inspection in mechatronic applications. Procedia Eng. 2014, 96, 227–234. [Google Scholar] [CrossRef] [Green Version]
- Peyton, A.J.; Beck, M.S.; Borges, A.R.; De Oliveira, J.E.; Lyon, G.M.; Yu, Z.Z.; Brown, M.W.; Ferrerra, J. Development of electromagnetic tomography (EMT) for industrial applications. Part 1: Sensor design and instrumentation. In Proceedings of the 1st World Congress on Industrial Process Tomography, Buxton, UK, 14–17 April 1999; Volume 3, pp. 306–312. [Google Scholar]
- Shimada, A. Recent advances and outlook in industrial instrumentation and mechatronics control. IEEJ Trans. Electr. Electron. Eng. 2016, 11, S100–S107. [Google Scholar] [CrossRef]
- Schmitz, S.; Yang, D.; Wurst, K.H. A new communication system for reconfigurable mechatronic modules. In Proceedings of the 2008 15th International Conference on Mechatronics and Machine Vision in Practice, Auckland, New Zealand, 2–4 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 121–126. [Google Scholar]
- Wiegman, C.; Pitla, S.; Shearer, S. Advances in communication systems in agricultural robotics. In Robotics and Automation for Improving Agriculture; Burleigh Dodds Science Publishing: Cambridgeshire, UK, 2019; pp. 49–79. [Google Scholar]
- Rzevski, G. On conceptual design of intelligent mechatronic systems. Mechatronics 2003, 13, 1029–1044. [Google Scholar] [CrossRef]
- Brecher, C.; Lohse, W.; Herfs, W. Mechatronic development of PLC software with virtual machine tools. In Proceedings of the 2009 IEEE International Conference on Control and Automation, Christchurch, New Zealand, 9–11 December 2009; IEEE: Piscataway, NJ, USA, 2009; pp. 2392–2397. [Google Scholar]
- Sajedipour, D.; Behbahani, S.; Tabatabaei, S.M.K. Mechatronic modeling and control of a lathe machine equipped with a MR damper for chatter suppression. In Proceedings of the IEEE ICCA, Xiamen, China, 9–11 June 2010; pp. 802–807. [Google Scholar]
- Xu, C.; Ming, A.; Kanamori, C.; Aoyama, H.; Li, H.H.; Xu, L.; Li, X.S.; Benjanarasuth, T.; Nundrakwang, S.; Panya, S.; et al. Internet based crossover robot remote control competition in Asian countries-Development of practice based innovative education methodology, Phase, II. In Proceedings of the 2009 International Conference on Mechatronics and Automation, Changchun, China, 9–12 August 2009; pp. 2771–2776. [Google Scholar]
- Santos, A.C.O.; da Silva, C.E.S.; Braga, R.A.D.S.; Corrêa, J.É.; de Almeida, F.A. Customer value in lean product development: Conceptual model for incremental innovations. Syst. Eng. 2020, 23, 281–293. [Google Scholar] [CrossRef]
- Askar, A.; Treptow, H. Quality Assurance in Tropical Fruit Processing; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2013. [Google Scholar]
- Salerno, M.S.; de Vasconcelos Gomes, L.A.; Da Silva, D.O.; Bagno, R.B.; Freitas, S.L.T.U. Innovation processes: Which process for which project? Technovation 2015, 35, 59–70. [Google Scholar] [CrossRef]
- Witell, L.; Snyder, H.; Gustafsson, A.; Fombelle, P.; Kristensson, P. Defining service innovation: A review and synthesis. J. Bus. Res. 2016, 69, 2863–2872. [Google Scholar]
- Beckmann-Dobrev, B.; Kind, S.; Stark, R. Hybrid Simulators for Product Service-Systems–Innovation Potential Demonstrated on Urban Bike Mobility. Procedia CIRP 2015, 36, 78–82. [Google Scholar] [CrossRef] [Green Version]
- Pilat, Z.; Klimasara, W.; Bęben, Ł.; Pachuta, M.; Smater, M.; Falkowski, P. Advanced mechatronic solutions in implementing the technology of automated assembling of the gas springs’ sockets. In Proceedings of the 14th International Conference Mechatronic Systems and Materials, Zakopane, Poland, 4–6 June 2018; AIP Publishing LLC: Melville, NY, USA, 2018; Volume 2029, p. 020056. [Google Scholar]
- Pedroli, E.; Greci, L.; Colombo, D.; Serino, S.; Cipresso, P.; Arlati, S.; Mondellini, M.; Boilini, L.; Giussani, V.; Goulene, K.; et al. Characteristics, usability, and users experience of a system combining cognitive and physical therapy in a virtual environment: Positive bike. Sensors 2018, 18, 2343. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Cortese, M.; Cempini, M.; de Almeida Ribeiro, P.R.; Soekadar, S.R.; Carrozza, M.C.; Vitiello, N. A mechatronic system for robot-mediated hand telerehabilitation. IEEE/ASME Trans. Mechatron. 2014, 20, 1753–1764. [Google Scholar] [CrossRef]
- Mazzoleni, S.; Van Vaerenbergh, J.; Toth, A.; Munih, M.; Guglielmelli, E.; Dario, P. ALLADIN: A Novel Mechatronic Platform Assessing Post-Stroke Functional Recovery. In Proceedings of the 9th International Conference on Rehabilitation Robotics 2005 (ICORR 2005), Chicago, IL, USA, 28 June–1 July 2005; IEEE: Piscataway, NJ, USA, 2005; pp. 156–159. [Google Scholar]
- Garetti, M.; Fumagalli, L.; Negri, E. Role of ontologies for CPS implementation in manufacturing. Manag. Prod. Eng. Rev. 2015, 6, 26–32. [Google Scholar] [CrossRef] [Green Version]
- Czerniak, J.M.; Macko, M.; Ewald, D. The CutMAG as a new hybrid method for multi-edge grinder design optimisation. In Novel Developments in Uncertainty Representation and Processing: Advances in Intuitionistic Fuzzy Sets and Generalized Nets, Proceedings of the 14th International Conference on Intuitionistic Fuzzy Sets and Generalized Nets, Cracow, Poland, 26–28 October 2016; Springer International Publishing: Berlin/Heidelberg, Germany, 2016; pp. 327–337. [Google Scholar]
- Bemfica, J.R.; Melchiorri, C.; Moriello, L.; Palli, G.; Scarcia, U.; Vassura, G. Mechatronic design of a three-fingered gripper for underwater applications. IFAC Proc. Vol. 2013, 46, 307–312. [Google Scholar] [CrossRef]
- Farmakopoulos, M.G.; Nikolakopoulos, P.G.; Papadopoulos, C.A. Design of an active hydromagnetic journal bearing. Proc. Inst. Mech. Eng. Part J J. Eng. Tribol. 2013, 227, 673–694. [Google Scholar] [CrossRef]
- Schiffer, S.; Rothe, S.; Baccar, D.; Söffker, D. Classifiation of Systems’ Health Condition Using the New Adaptive Fuzzy-Based FeatureClassification Approach AFFCA in Comparison to a Macro-Data-Based Approach. In Proceedings of the EWSHM—7th European Workshop on Structural Health Monitoring ⟨hal-01020457⟩, Nantes, France, 8–11 July 2014. [Google Scholar]
- Castejón, C.; Giménez, A.; Jardón, A.; Rubio, H.; García-Prada, J.C.; Balaguer, C. Integrated system of assisted mechatronic design for oriented computer to automatic optimising of structure of service robots (SIDEMAR). In Climbing and Walking Robots; Springer: Berlin/Heidelberg, Germany, 2006; pp. 327–334. [Google Scholar]
- Dilger, E.; Karrelmeyer, R.; Straube, B. Fault tolerant mechatronics [automotive applications]. In Proceedings of the 10th IEEE International On-Line Testing Symposium, Funchal, Portugal, 14 July 2004; IEEE: Piscataway, NJ, USA, 2004; pp. 214–218. [Google Scholar]
- Allotta, B.; Pugi, L.; Bartolini, F.; Ridolfi, A.; Costanzi, R.; Monni, N.; Gelli, J. Preliminary design and fast prototyping of an autonomous underwater vehicle propulsion system. Proc. Inst. Mech. Eng. Part M J. Eng. Marit. Environ. 2015, 229, 248–272. [Google Scholar] [CrossRef]
- Checcozzo, R.; Rusina, F.; Mangeruca, L.; Ballarino, A.; Abadie, C.; Brusaferri, A.; Harrison, R.; Monfared, R. RI-MACS: An innovative approach for future automation systems. Int. J. Mechatron. Manuf. Syst. 2009, 2, 242–264. [Google Scholar] [CrossRef] [Green Version]
- Trachtler, A.; Muinch, E.; Vocking, H. Iterative learning and self-optimization techniques for the innovative railcab-system. In Proceedings of the IECON 2006—32nd Annual Conference on IEEE Industrial Electronics, Paris, France, 6–10 November 2006; IEEE: Piscataway, NJ, USA, 2006; pp. 4683–4688. [Google Scholar]
- Fanucci, L.; Pasetti, G.; D’Abramo, P.; Serventi, R.; Tinfena, F.; Chassard, P.; Labiste, L.; Tisserand, P. An high voltage CMOS voltage regulator for automotive alternators with programmable functionalities and full reverse polarity capability. In Proceedings of the 2010 Design, Automation & Test in Europe Conference & Exhibition (DATE 2010), Dresden, Germany, 8–12 March 2010; IEEE: Piscataway, NJ, USA, 2010; pp. 526–531. [Google Scholar]
- Schitter, G. Improving the Speed of AFM by Mechatronic Design and Modern Control Methods Geschwindigkeitsverbesserung beim AFM mittels mechatronischem Design und modernen Regelmethoden. Tm-Tech. Mess. Plattf. Für Methoden Syst. Anwendungen Messtech. 2009, 76, 266–273. [Google Scholar] [CrossRef]
- Rossi, A.; Trevisani, A.; Zanotto, V. A telerobotic haptic system for minimally invasive stereotactic neurosurgery. Int. J. Med. Robot. Comput. Assist. Surg. 2005, 1, 64–75. [Google Scholar] [CrossRef]
- Controzzi, M.; Cipriani, C.; Carrozza, M.C. Mechatronic design of a transradial cybernetic hand. In Proceedings of the 2008 IEEE/RSJ International Conference on Intelligent Robots and Systems, Nice, France, 22–26 September 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 576–581. [Google Scholar]
- Massaro, A.; Giannoccaro, N.I.; Spedicato, L.; Lay-Ekuakille, A.; Missori, M.; Malvindi, M.A. Characterization of an innovative like-eye sensor for feature detection and robot sensing. Measurement 2014, 55, 153–167. [Google Scholar] [CrossRef]
- Freddi, D. The integration of old and new technological paradigms in low-and medium-tech sectors: The case of mechatronics. Res. Policy 2009, 38, 548–558. [Google Scholar] [CrossRef]
- Merino Peres, M.; Castelo Branco, I.G.; dos Santos, A.C. A Methodology for Mechatronic Products Design Applied to the Development of a Instrument for Soil Compaction Measurement. In Transdisciplinary Lifecycle Analysis of Systems; Curran, R., Ed.; IOS Press: Amsterdam, The Netherlands, 2015; Volume 1, pp. 396–405. [Google Scholar]
- Veryzer, R.W.; Borja de Mozota, B. The impact of user-oriented design on new product development: An examination of fundamental relationships. J. Prod. Innov. Manag. 2005, 22, 128–143. [Google Scholar] [CrossRef]
- Bruno, F.; Muzzupappa, M.; Barbieri, L.; Gallo, A.; Ritacco, G.; Lagudi, A.; La Russa, M.F.; Ruffolo, S.A.; Crisci, G.M.; Ricca, M.; et al. The CoMAS project: New materials and tools for improving the in situ documentation, restoration, and conservation of underwater archaeological remains. Mar. Technol. Soc. J. 2016, 50, 108–118. [Google Scholar] [CrossRef]
- Odeh, S.; McKenna, S.; Abu-Mulaweh, H. A unified first-year engineering design-based learning course. Int. J. Mech. Eng. Educ. 2017, 45, 47–58. [Google Scholar] [CrossRef]
- Riccardi, L.; Rizzello, G.; Naso, D.; Holz, B.; Seelecke, S.; Janocha, H.; Turchiano, B. Modeling and control of innovative smart materials and actuators: A tutorial. In Proceedings of the 2014 IEEE Conference on Control Applications (CCA), Juan Les Antibes, France, 8–10 October 2014; IEEE: Piscataway, NJ, USA, 2014; pp. 965–977. [Google Scholar]
- Alemohammad, H.; Shahini, M. Use of Mobile Devices as an Interactive Learning Method in a Mechatronics Engineering Course: A Case Study. In Proceedings of the ASME 2013 International Mechanical Engineering Congress and Exposition, San Diego, CA, USA, 15–21 November 2013; American Society of Mechanical Engineers Digital Collection: New York, NY, USA, 2013. [Google Scholar]
- Hollander, S. The Sources of Efficiency: A Study of du Pont Rayon Plants; MIT Press: Cambridge, MA, USA, 1965. [Google Scholar]
- Enos, J. Measurement of the rate of technological progress in the petroleum refining industry. J. Ind. Econ. 1958, 6, 180–197. [Google Scholar] [CrossRef]
- Chou, C.; Kimbrough, S.O. An agent-based model of organizational ambidexterity decisions and strategies in new product development. Comput. Math. Organ. Theory 2016, 22, 4–46. [Google Scholar] [CrossRef]
- Hutchinson, P. Reinventing innovation management: The impact of self-innovating artificial intelligence. IEEE Trans. Eng. Manag. 2021, 68, 628–639. [Google Scholar] [CrossRef]
- Smulders, F.E. Co-operation in NPD: Coping with different learning styles. Creat. Innov. Manag. 2004, 13, 263–273. [Google Scholar] [CrossRef]
- Barbalho, S.C.M.; Rozenfeld, H. Modelo de referência para o processo de desenvolvimento de produtos mecatrônicos (MRM): Validação e resultados de uso. Gestão Produção 2013, 20, 162–179. [Google Scholar] [CrossRef] [Green Version]
- de Carvalho, R.A.; da Hora, H.; Fernandes, R. A process for designing innovative mechatronic products. Int. J. Prod. Econ. 2021, 231, 107887. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Bases and Specifications |
| Data Base Scopus e Web Of Science |
| Publication Period Until 2021 |
| Boolean operators: “AND” “OR” “ * ” “( )” |
| Type of publications: All |
| Keyword combinations |
| Textual content:TITLE-ABS-KEY-AUTH |
| Terms: “mechatronic*” “mechatronics engineering” “mechatronics systems ” “innov*” |
| Final combination: WEB OF SCIENCE TS = ((innov*) AND (mechatronic OR “mechatronics engineering” OR “mechatronics systems”)) SCOPUS TITLE-ABS-KEY (innov* AND mechatronic OR “mechatronics engineering” OR “mechatronics systems”) |
| Analysis Variable | Analysis Level | Authors | |
|---|---|---|---|
| Product Development | By innovation project | Product Technology Process Technology | Wheelwright and Clark (1992), Clausing (1994), Clark and Fujimoto (1991), Ulrich and Eppinger (1995) Wheelwright e Clark (1992) |
| By type of technology used (degree of project innovation) | Incremental Platform Radical | Clark and Guy (1998), Henderson e Clark (1990); Burgelman, Maidique e Wheelright (1998) e Christensen (2019) | |
| Technological Development | Advanced research and development | Wheelwright e Clark (1992), | |
| Components in a Mechatronic System | Product structure and technologies involved | Sensors and Instrumentation Processing and Control Software Actuators and Drivers Engineering Project Communication system | Barbalho (2006); Bradley (2000); Bernardi et al., (2002) |
| Areas of mechatronics | By main subjects | Mechanical Engineering Electrical engineering Materials Engineering Chemical engineering Control System Embedded Systems Software Engineering Math Neuroengineering Agronomy | Bradley (2015); Azar (2019); Isermann (2008) |
| Author | Title | Source | Number of Citations | Abstract |
|---|---|---|---|---|
| Diftler et al. (2011) | Robonaut 2-the first humanoid robot in space | Proceedings—IEEE International Conference on Robotics and Automation | 246 | NASA and General Motors developed the second-generation Robonaut, Robonaut 2 or R2, a state-of-the-art, dexterous anthropomorphic robotic torso with significant technical improvements over its predecessor, making it a far more valuable tool for astronauts. The R2’s integrated mechatronic design results in a more compact and robust distributed control system. |
| Massa et al. (2002) | Design and development of an underactuated prosthetic hand | Proceedings—IEEE International Conference on Robotics and Automation | 233 | This article focuses on an innovative approach to developing prosthetic hands based on underactuated mechanisms. Furthermore, it describes the development and a preliminary analysis of a prototype of an underactuated prosthetic hand. |
| Isermann (2008) | Mechatronic systems-Innovative products with embedded control | Control Engineering Practice | 231 | This contribution summarizes ongoing developments for mechatronic systems, shows design approaches and examples of mechatronic products, and considers various embedded control functions and the system’s integrity. One field of ongoing developments, automotive mechatronics, where especially large influences can be seen, is described in more detail by discussing mechatronic suspensions, mechatronic brakes, active steering, and roll stabilization systems. |
| Bracewell and Sharpe (1996) | Functional descriptions used in computer support for qualitative scheme generation—“Schemebuilder”. | Artificial Intelligence for Engineering Design, Analysis, and Manufacturing: AIEDAM | 132 | With mechatronic product development as the main theme, this paper describes a closely integrated methodology incorporating a bond graph approach to continuous-time energetic systems and high-level Petri nets for the rigorous description of discrete-time information systems. |
| Grebenstein et al. (2010) | Antagonistically driven finger design for the anthropomorphic DLR hand arm system | IEEE-RAS International Conference on Humanoid Robots, Humanoids 2010 | 85 | The paper presents a finger design that combines a reduced diversity of parts with the need to build five kinematically different fingers. The fingers are protected against overload by allowing subluxation of the joints. The tendon routing allows for an antagonistic actuation and is optimized to minimize friction and wear. |
| Horowitz et al. (2007) | Dual-stage servo systems and vibration compensation in computer hard disk drives | Control Engineering Practice | 80 | This paper discusses two mechatronic innovations in magnetic hard disk drive servo systems, which may have to be deployed soon to sustain these devices’ continuing 60% annual increase in storage density. |
| Gouaillier (2009) | Mechatronic design of NAO humanoid | Proceedings—IEEE International Conference on Robotics and Automation | 77 | This article presents the mechatronic design of the autonomous humanoid robot, the NAO, built by the French company Aldebaran-Robotics. It distinguishes itself from existing humanoids thanks to its pelvis kinematics design, its proprietary actuation system based on brush DC motors, and its electronic, computer, and distributed software architectures. |
| Merzouki et al. (2012) | Intelligent mechatronic systems: modeling, control, and diagnosis. | Springer Book | 69 | Presents the recent developments in the design of intelligent mechatronic systems. Offers practical advice on designing practical, functional, and safe intelligent systems. |
| Palli et al. (2014) | The DEXMART hand: Mechatronic design and experimental evaluation of synergy-based control for human-like grasping | The International Journal of Robotics Research | 68 | This paper summarizes recent activities to develop an innovative anthropomorphic robotic hand called the DEXMART Hand. This research aims to face the problems that affect current robotic hands by introducing suitable design solutions to achieve simplification and cost reduction while possibly enhancing robustness and performance. |
| Goth, Putzo and Franke (2011) | Aerosol Jet printing on rapid prototyping materials for fine-pitch electronic applications | Proceedings—Electronic Components and Technology Conference | 57 | Printing technologies allow producing fine-pitch electronic applications to miniaturize mechatronic systems further. Aerosol Jet ® is an innovative non-contact and maskless printing process for fine structures below 50 μm with the possibility to process a wide variety of inks, including nanoparticle inks on different substrate materials. This research aims to qualify the Aerosol Jet technique to manufacture prototypes for MID (Molded Interconnect Devices). |
| Constantino et al. (2011) | Design and Test of an HV-CMOS Intelligent Power Switch with Integrated Protections and Self-Diagnostic for Harsh Automotive Applications | IEEE Transactions on Industrial Electronics | 53 | The design and characterization of high-voltage (HV)-CMOS technology of an innovative, intelligent power switch (IPS) for harsh automotive applications is proposed in this paper. The electrical simulations, experimental characterization, and testing at component and onboard system levels prove that the proposed design allows a compact, smart power switch realization facing the harshest automotive conditions. |
| Allotta et al. (2015) | Preliminary design and fast prototyping of an Autonomous Underwater Vehicle propulsion system | Journal of Engineering for the Maritime Environment | 52 | As a partner of THESAURUS, the Mechatronics and Dynamic Modelling Laboratory of the Department of Industrial Engineering, University of Florence, the project has developed an innovative low-cost, multi-role autonomous underwater vehicle, Tifone. This article deals with the adopted methodologies for autonomous underwater vehicle design: in particular, the main focus of this study is related to its propulsion system. |
| Huck et al. (2005) | Tutorial about the implementation of a vehicular high-speed communication system | International Symposium on Power Line Communications and its Applications | 51 | The growing network of mechatronic components within a vehicle and their interaction in creating new systems request special and higher challenges to future communication systems. Besides the software implementation of these innovative systems, investigating new physical layers is of essential interest and special interest in this article. |
| Mechatronics | ||
|---|---|---|
| Innovation as an Attribute/Asset | ||
| The bibliometric analysis employed in 646 publications | Qualitative Analyzes employed in 246 publications | Framework built for classification of publications according to the analysis variables characterized for the study |
| Components in a Mechatronic System | Distribution by Predominant Country | Qualitative Systematic Review |
| Sensors, instrumentation, and actuators predominated. | Germany, Italy, the United States, and China. | The expressive Robotics theme in the sample. |
| 5 Classified Scenarios | ||
| (1) practical approaches directed to the development of products, mechatronic systems, robots, and automation; | ||
| (2) researchers that study engineering curricula and education; | ||
| (3) studies involving components of a mechatronic system; | ||
| (4) the employment of artificial intelligence, engineering design, and product/machine design; | ||
| (5) methodologies for the design of mechatronics. | ||
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cintra Faria, A.C.; Barbalho, S.C.M. Mechatronics: A Study on Its Scientific Constitution and Association with Innovative Products. Appl. Syst. Innov. 2023, 6, 72. https://doi.org/10.3390/asi6040072
Cintra Faria AC, Barbalho SCM. Mechatronics: A Study on Its Scientific Constitution and Association with Innovative Products. Applied System Innovation. 2023; 6(4):72. https://doi.org/10.3390/asi6040072
Chicago/Turabian StyleCintra Faria, Ana Carolina, and Sanderson César Macêdo Barbalho. 2023. "Mechatronics: A Study on Its Scientific Constitution and Association with Innovative Products" Applied System Innovation 6, no. 4: 72. https://doi.org/10.3390/asi6040072