
Experimental Modeling of a New Multi-Degree-of-Freedom Fuzzy Controller Based Maximum Power Point Tracking from a Photovoltaic System

 ,
,
Abstract
:1. Introduction
- Propose a new controller (MDOF-FLC) to extract the maximum power point from the photovoltaic system under different climatic conditions (temperature and/or irradiance).
- Testing and evaluating the performance of the MDOF-FLC compared with the SUI-PID controller and the normal FLC under different solar pumps.
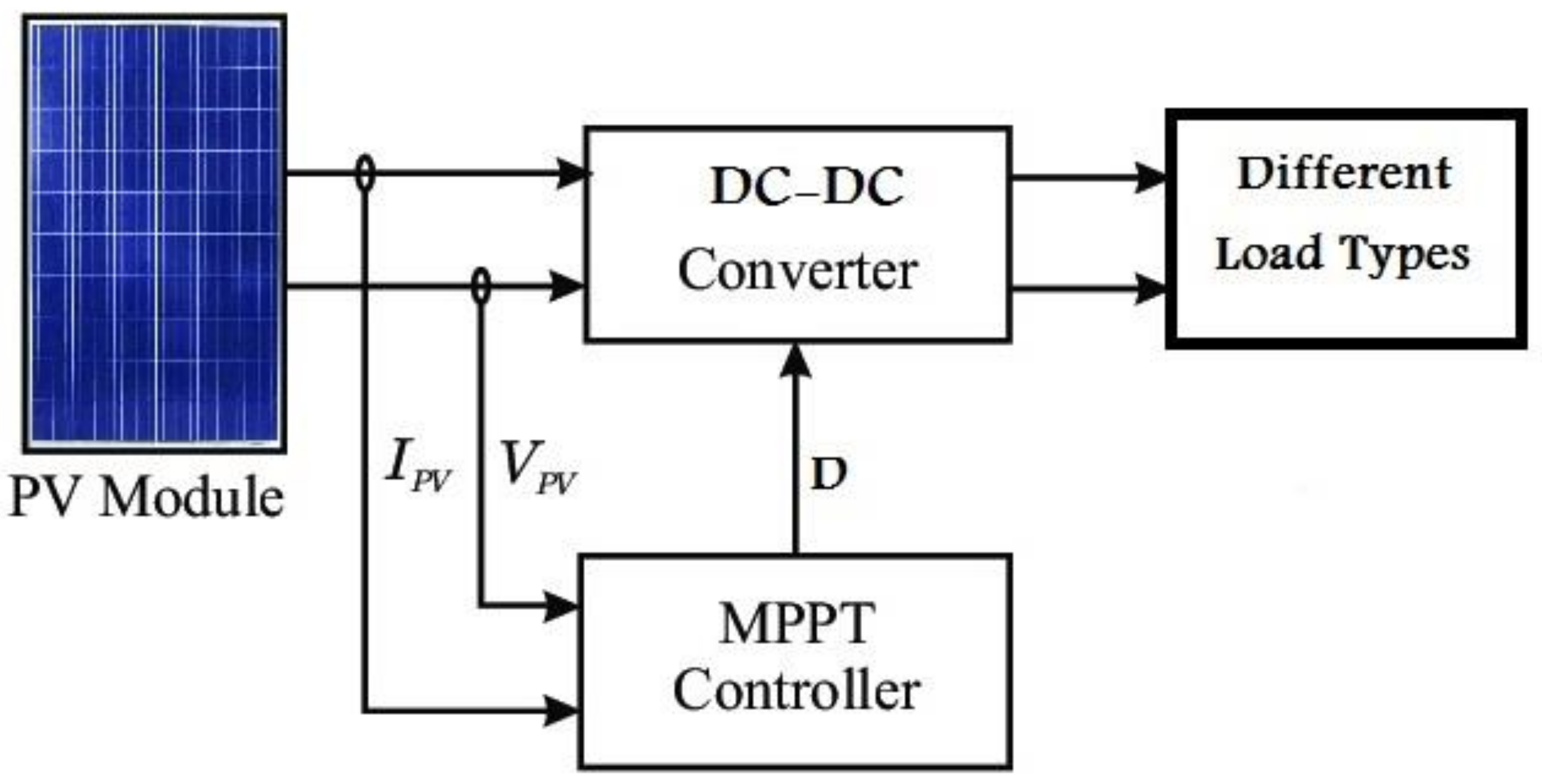
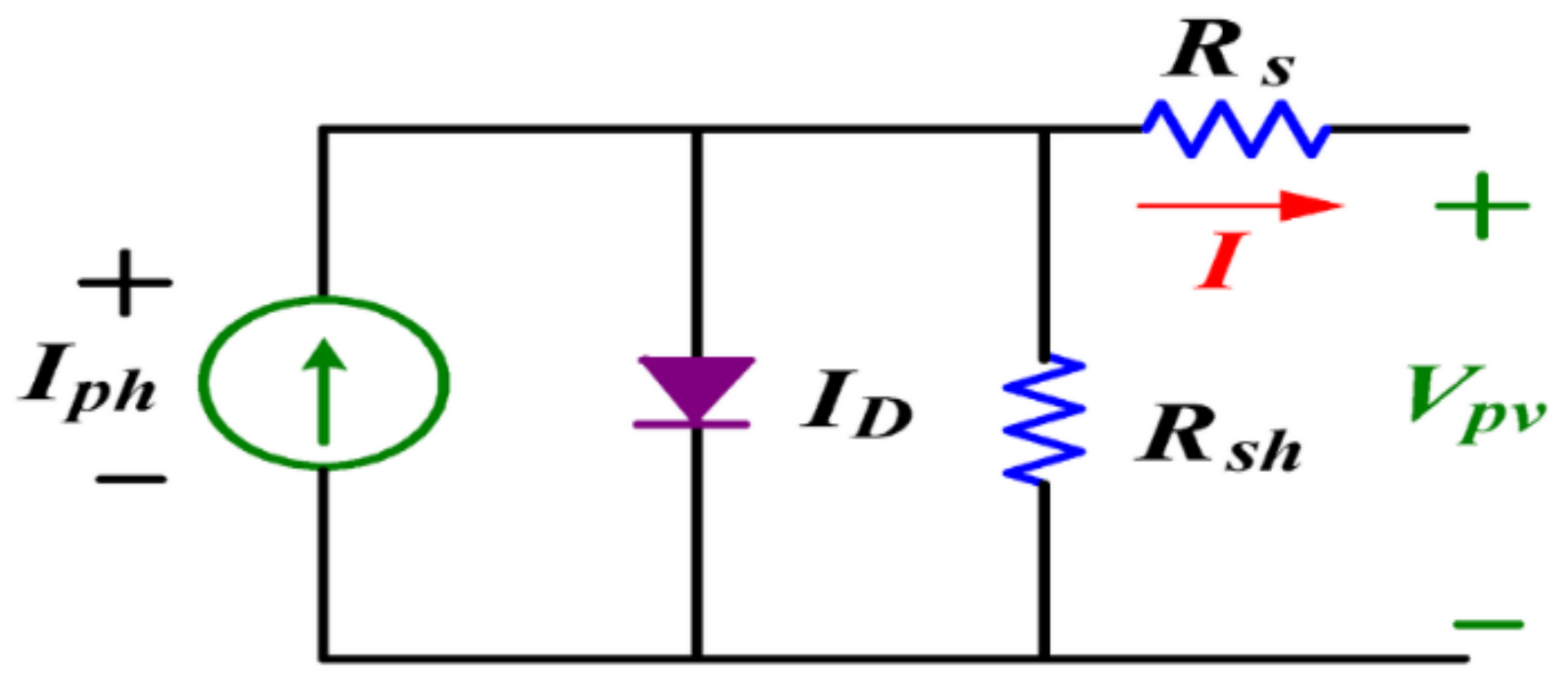
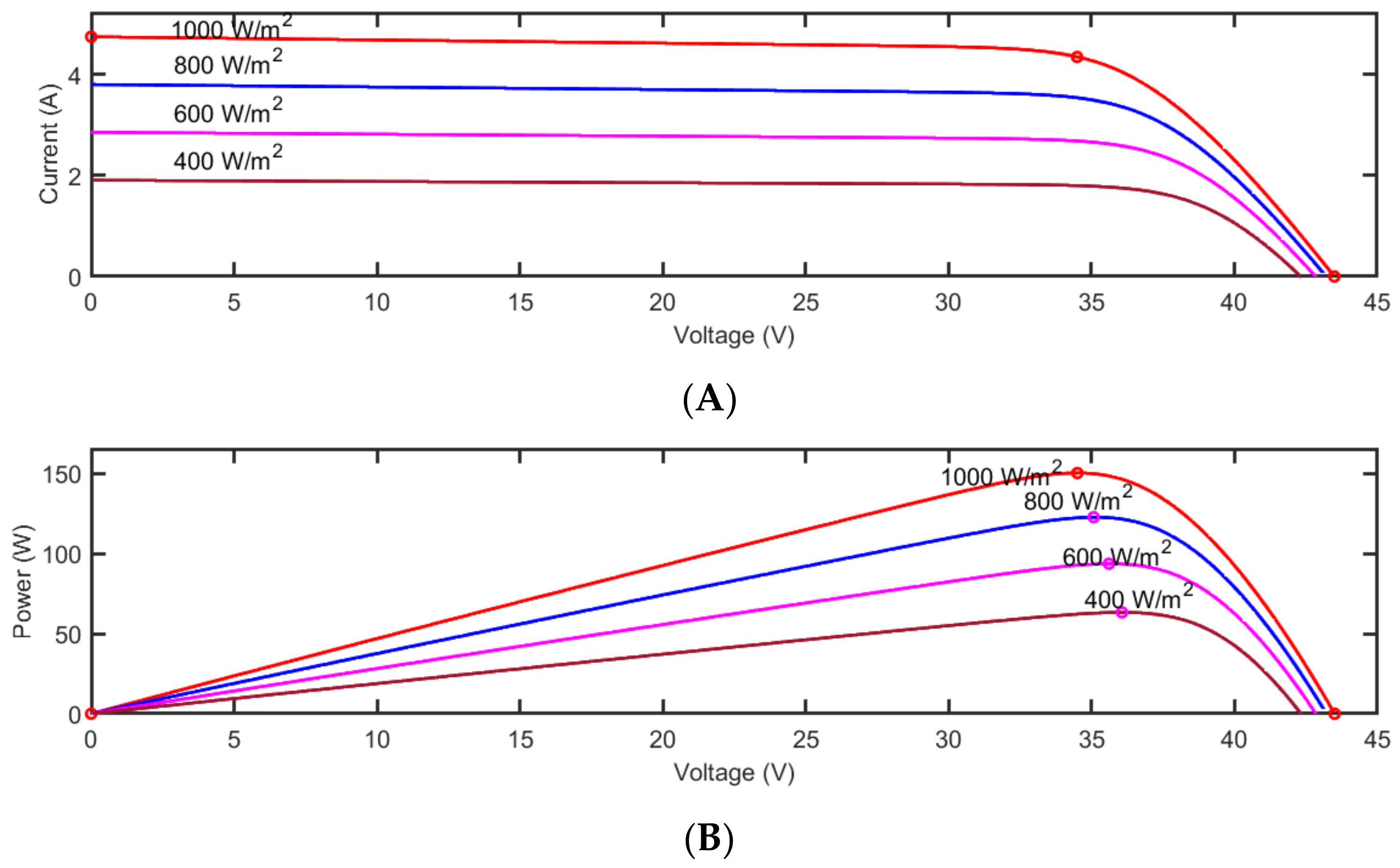
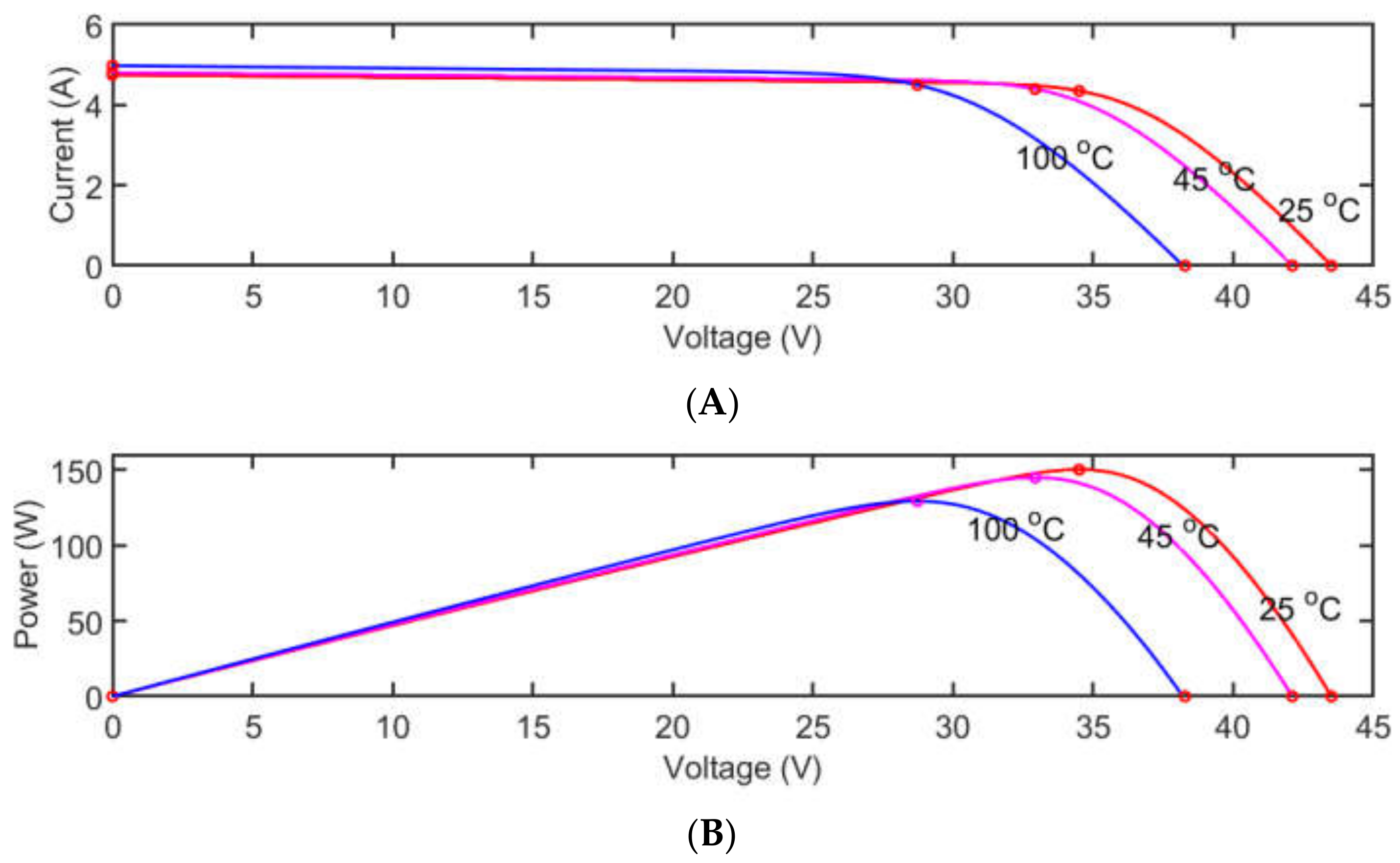
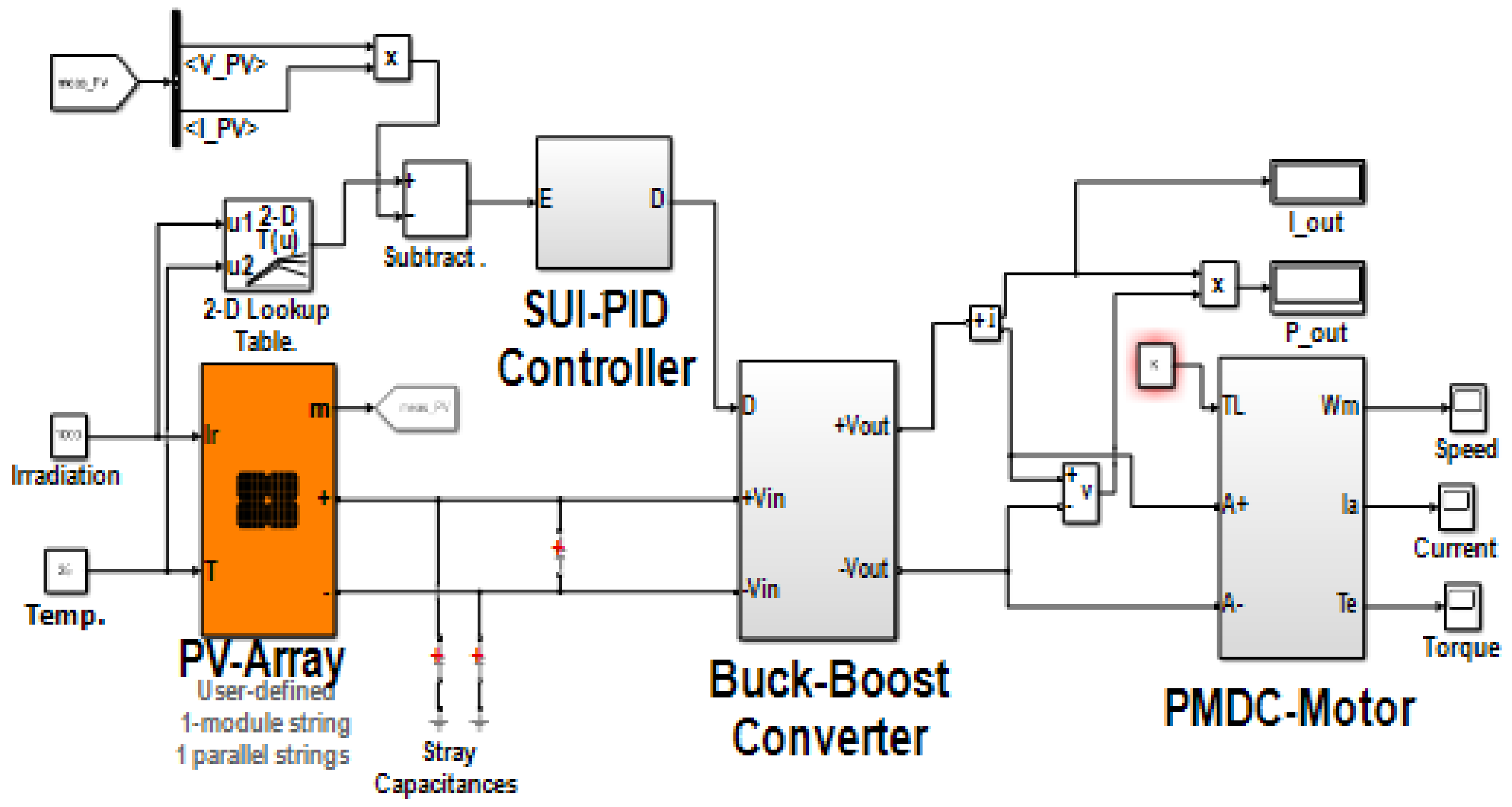
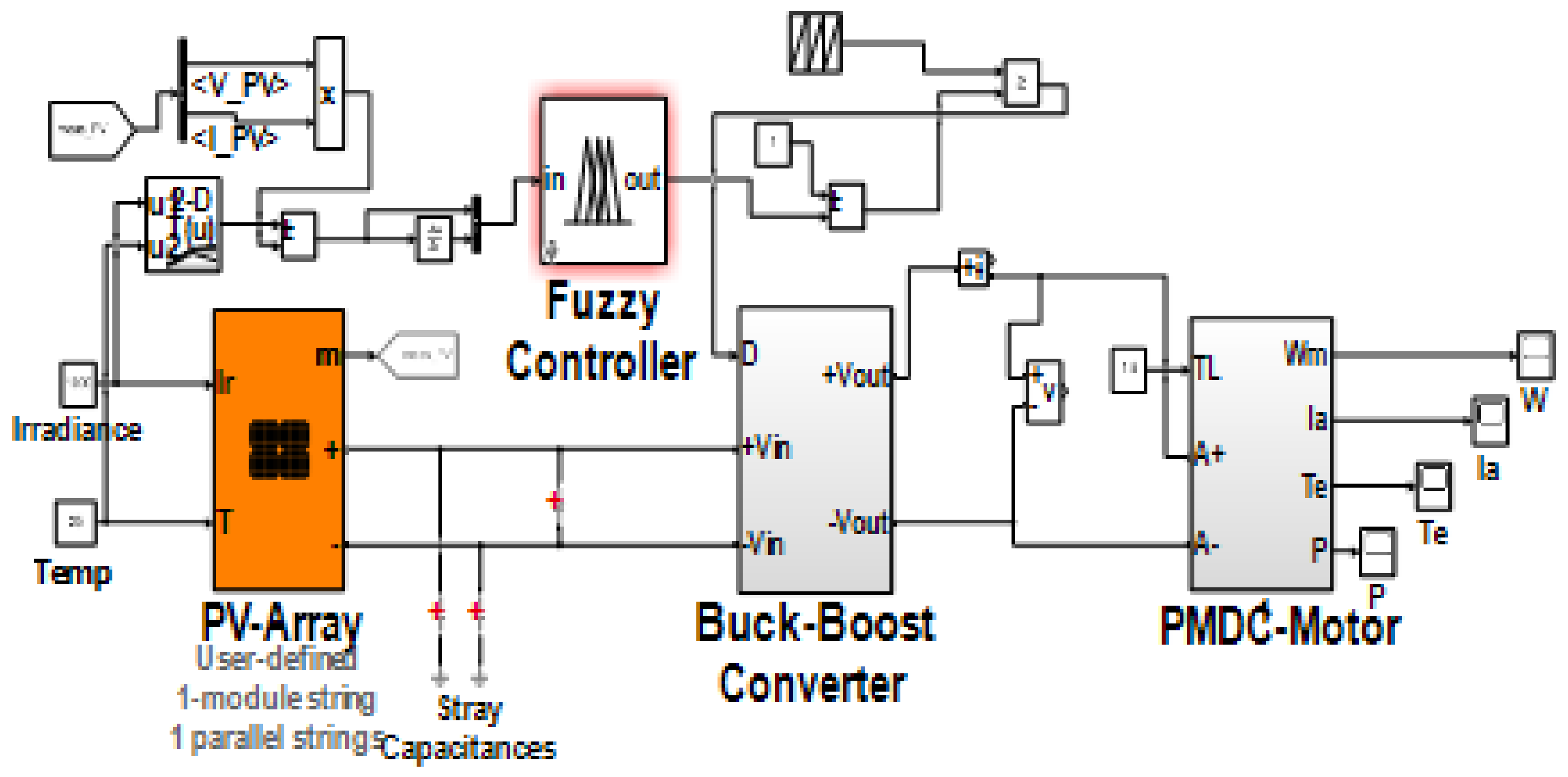
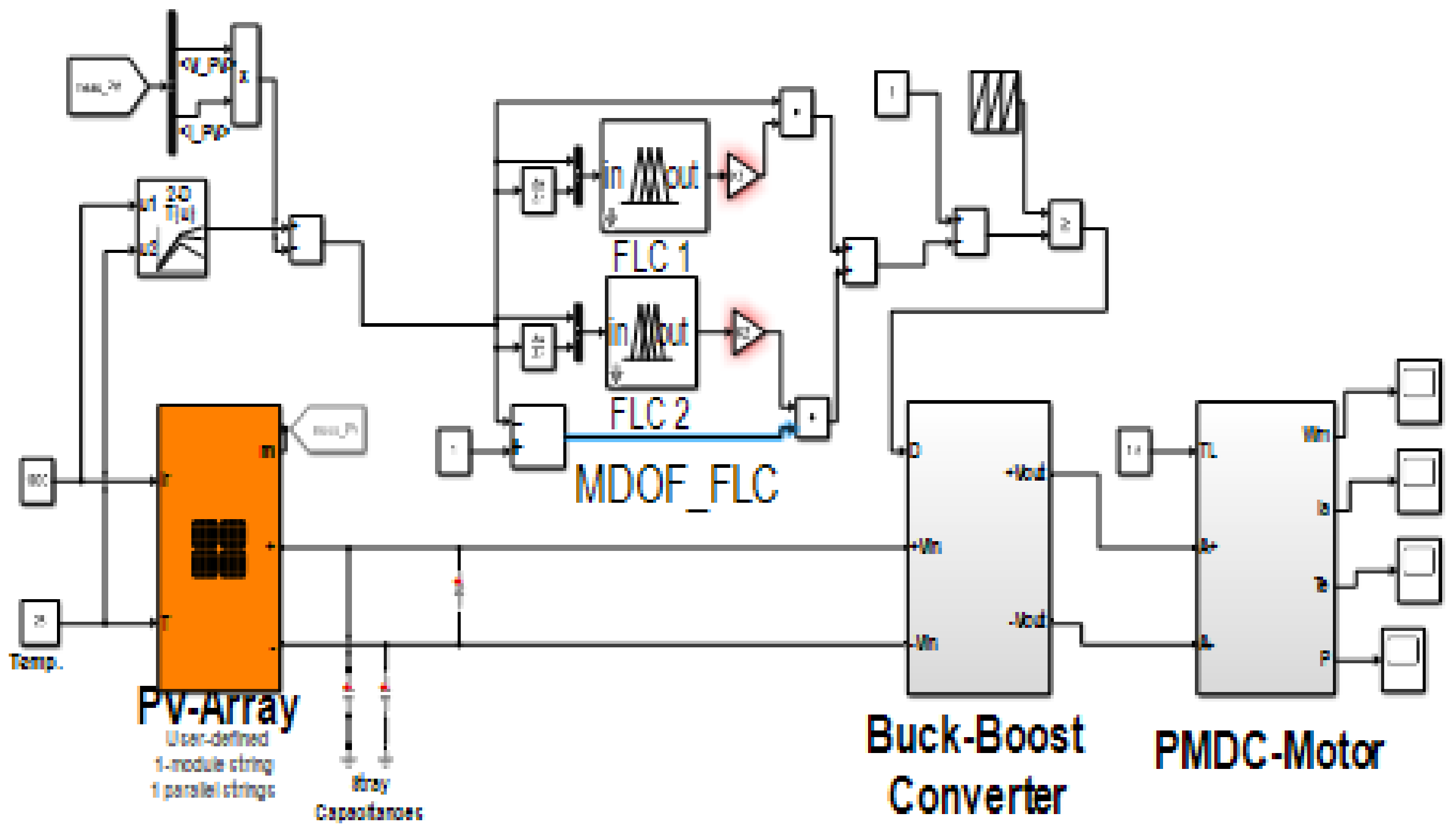
2. Modeling of the PV System
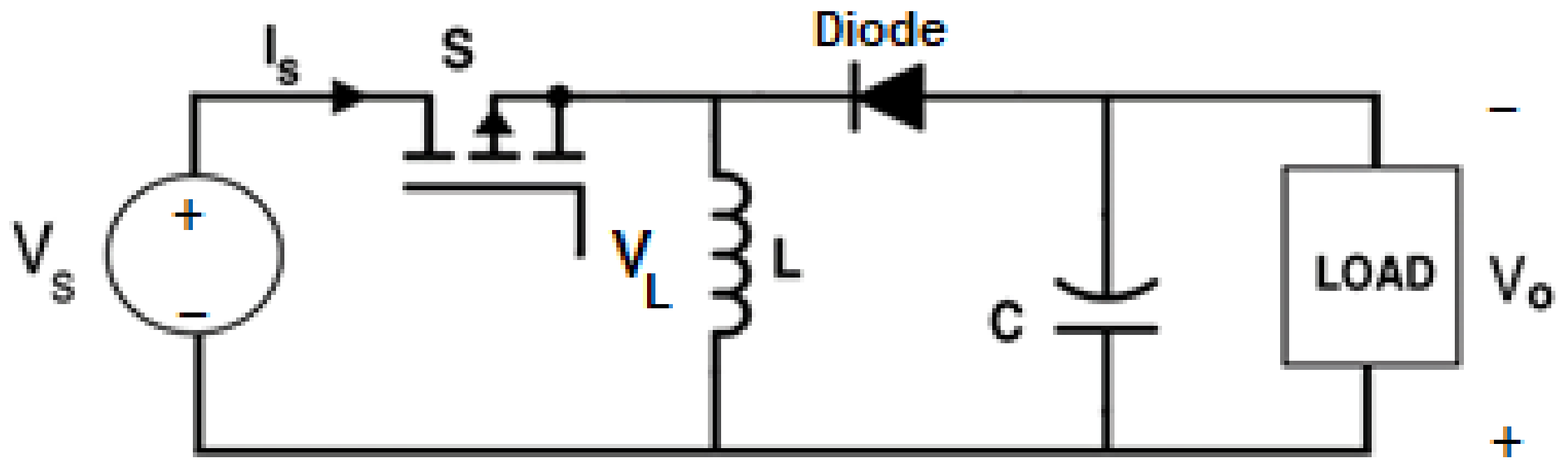
3. Design of Buck-Boost Converter
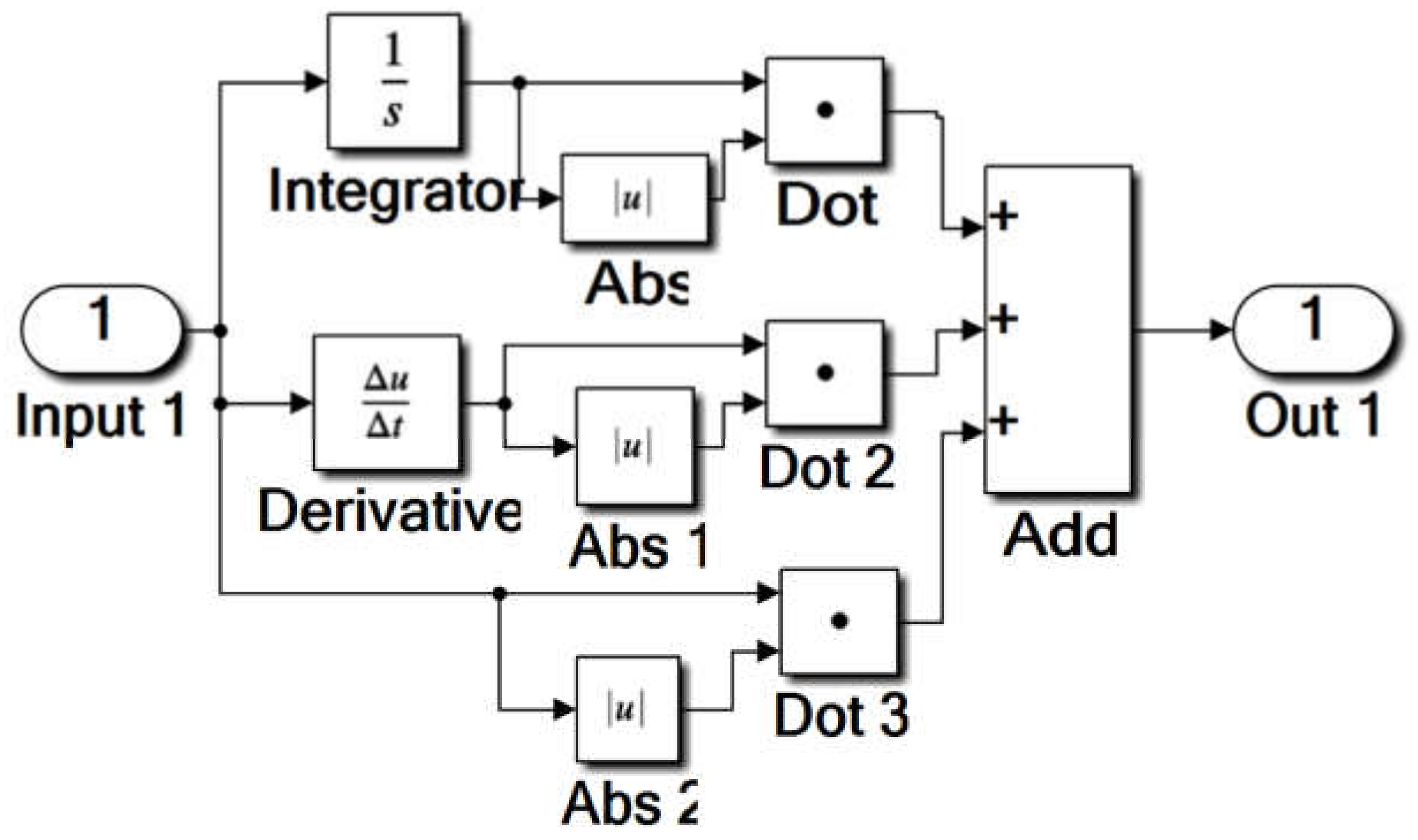
4. SUI-PID Controller
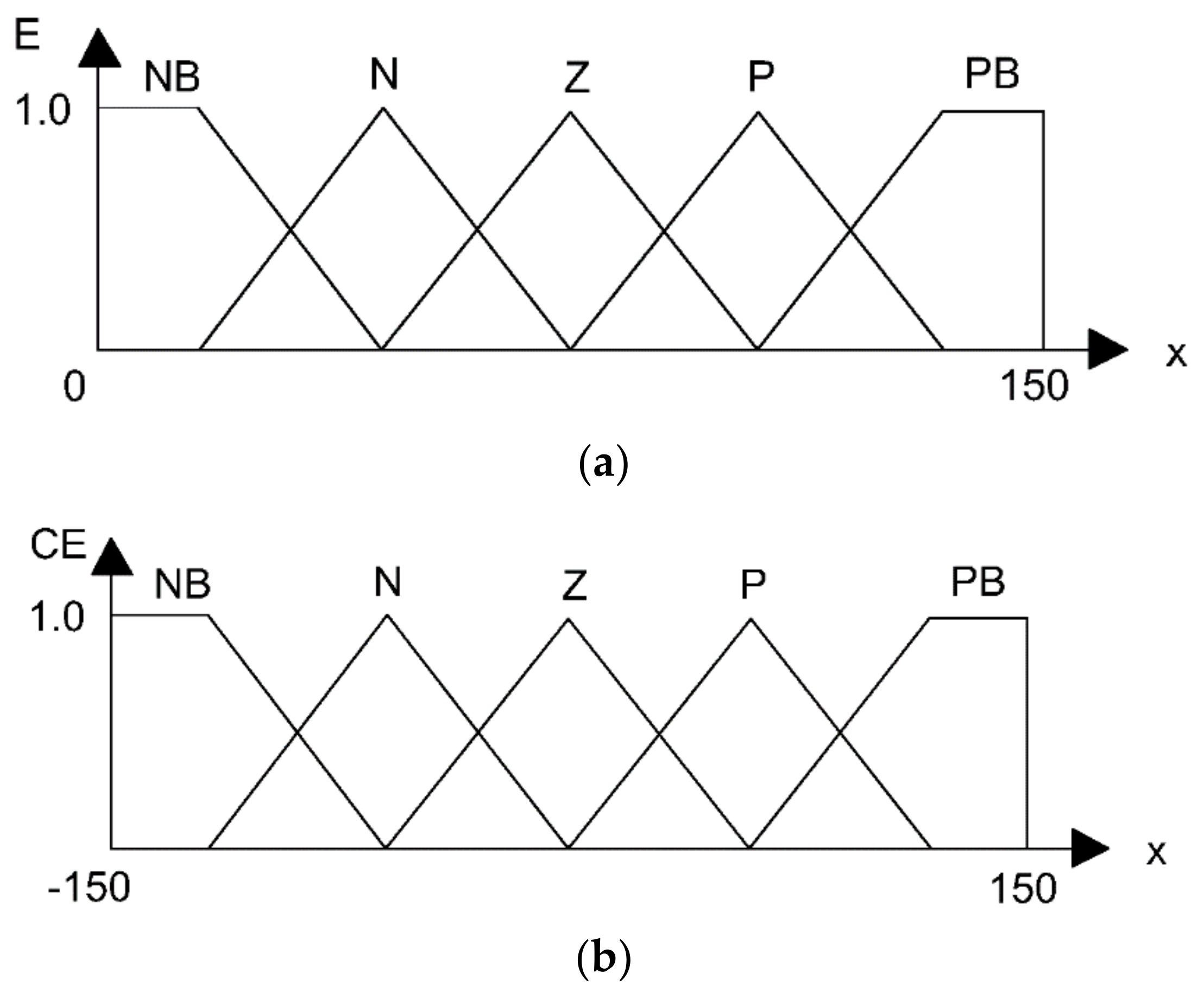
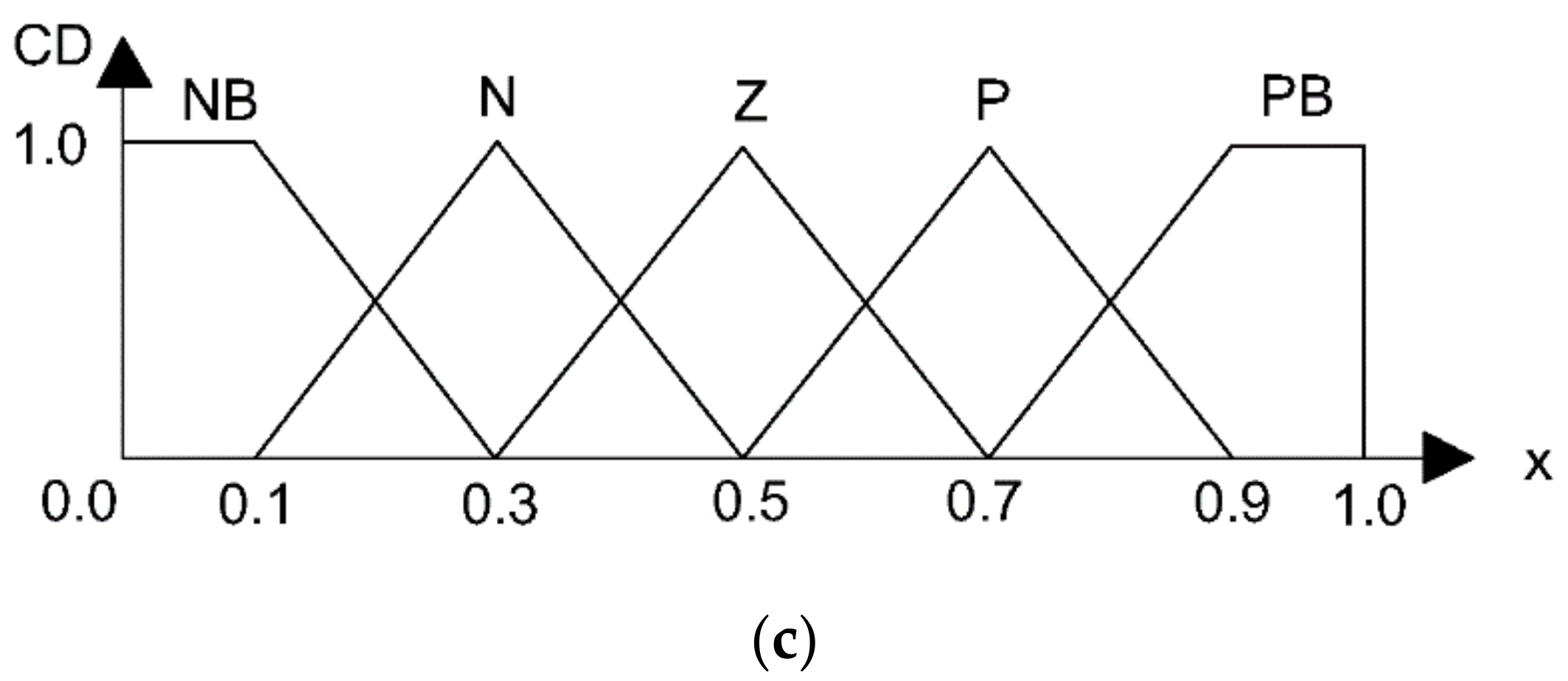
5. Normal Fuzzy Logic Controller
- If a positive change in the error signal is followed by a positive change in the change of the error signal, the chopper duty ratio must be raised. If the error signal variation is negative, the chopper ratio should be lowered.
- If the error signal change is zero or very close to zero, which means it has reached its maximum, the chopper ratio should not change.
- If a negative change in the error signal is followed by a positive change in the error signal, the chopper duty ratio must be lowered. If the error signal variation is positive, then the chopper ratio should be increased.


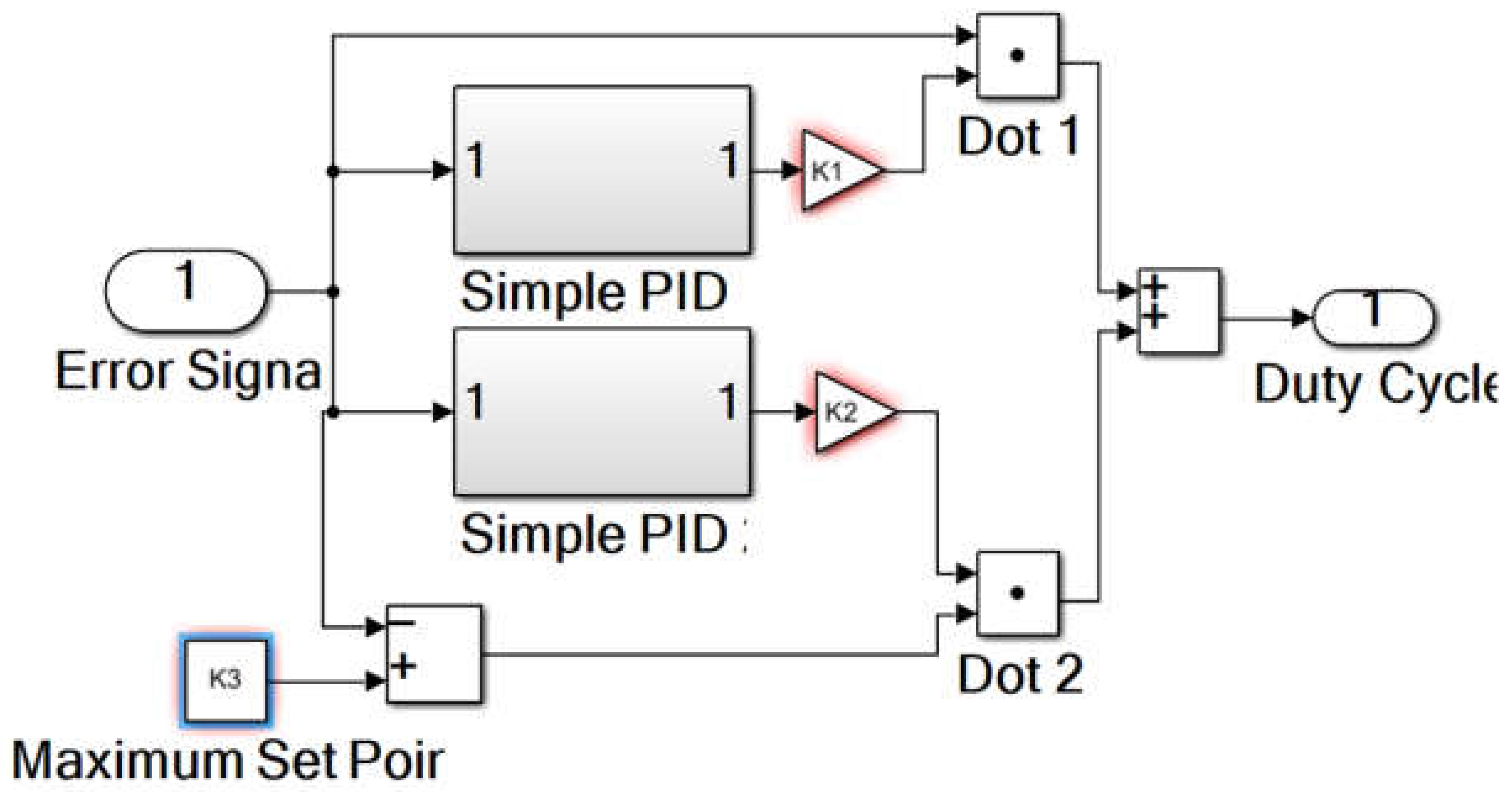
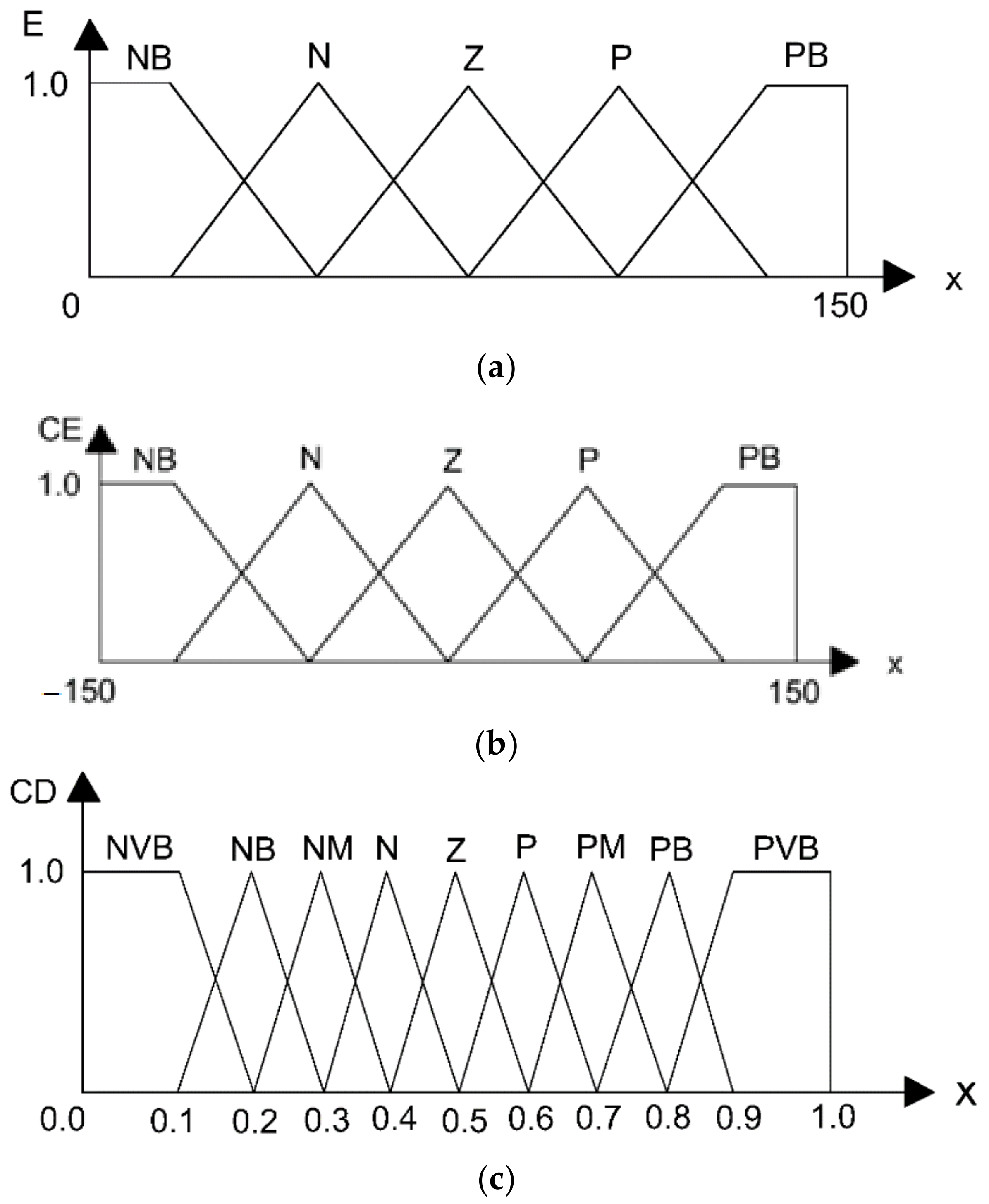
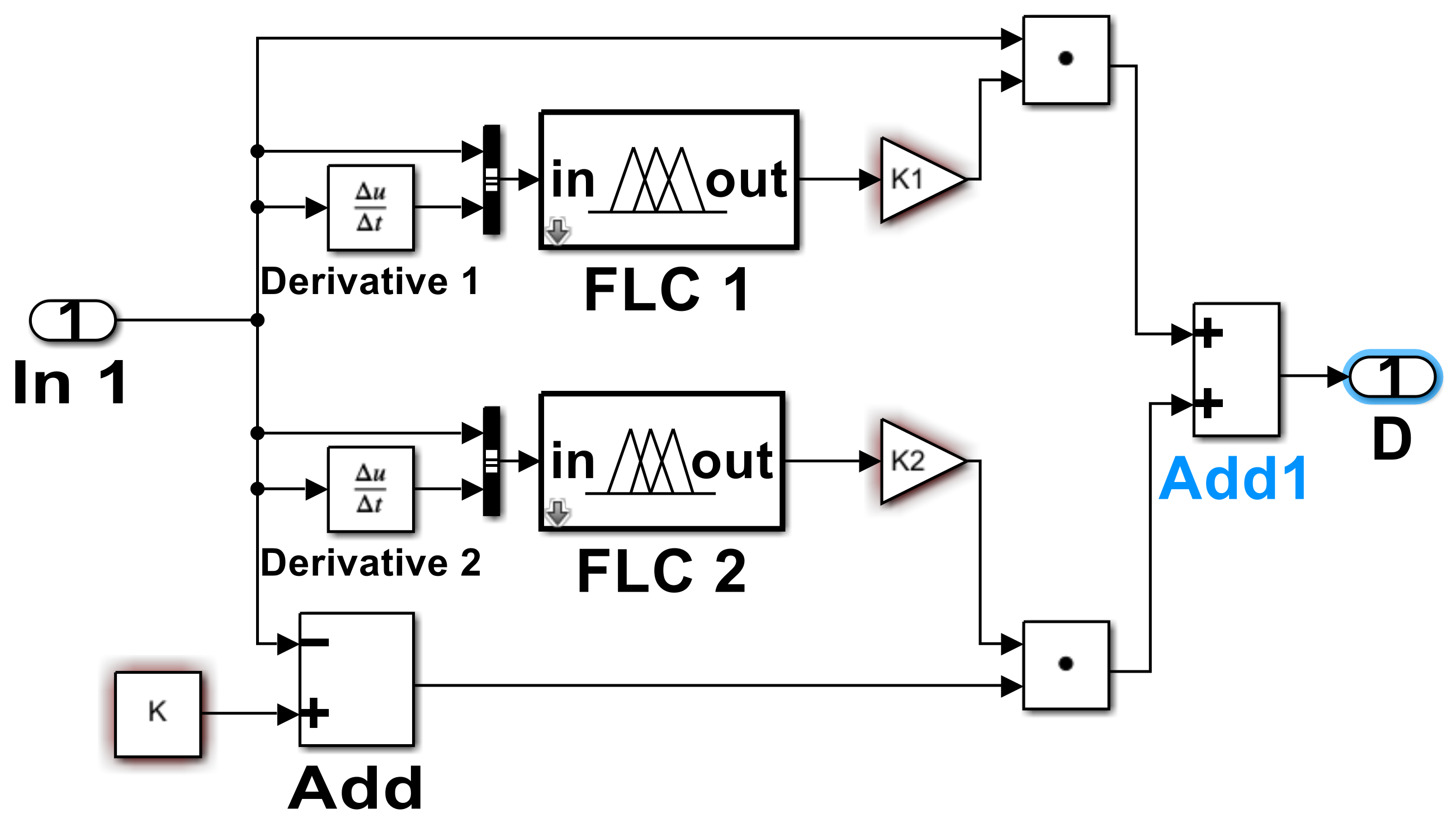
6. Design Methodology of the Proposed MDOF Fuzzy Logic Controller

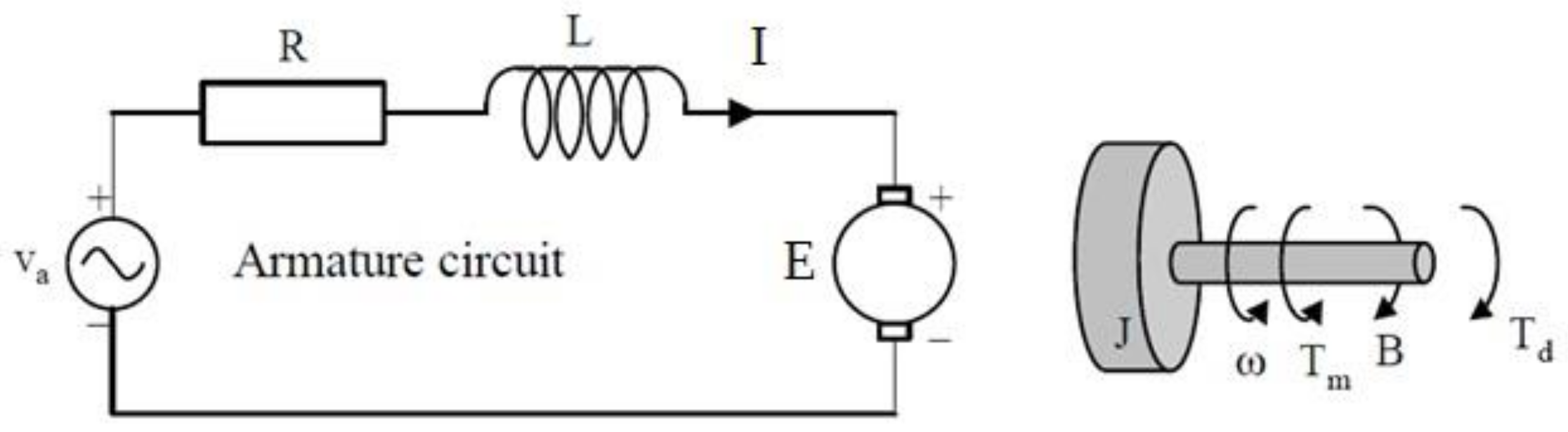
7. DC Solar Pump
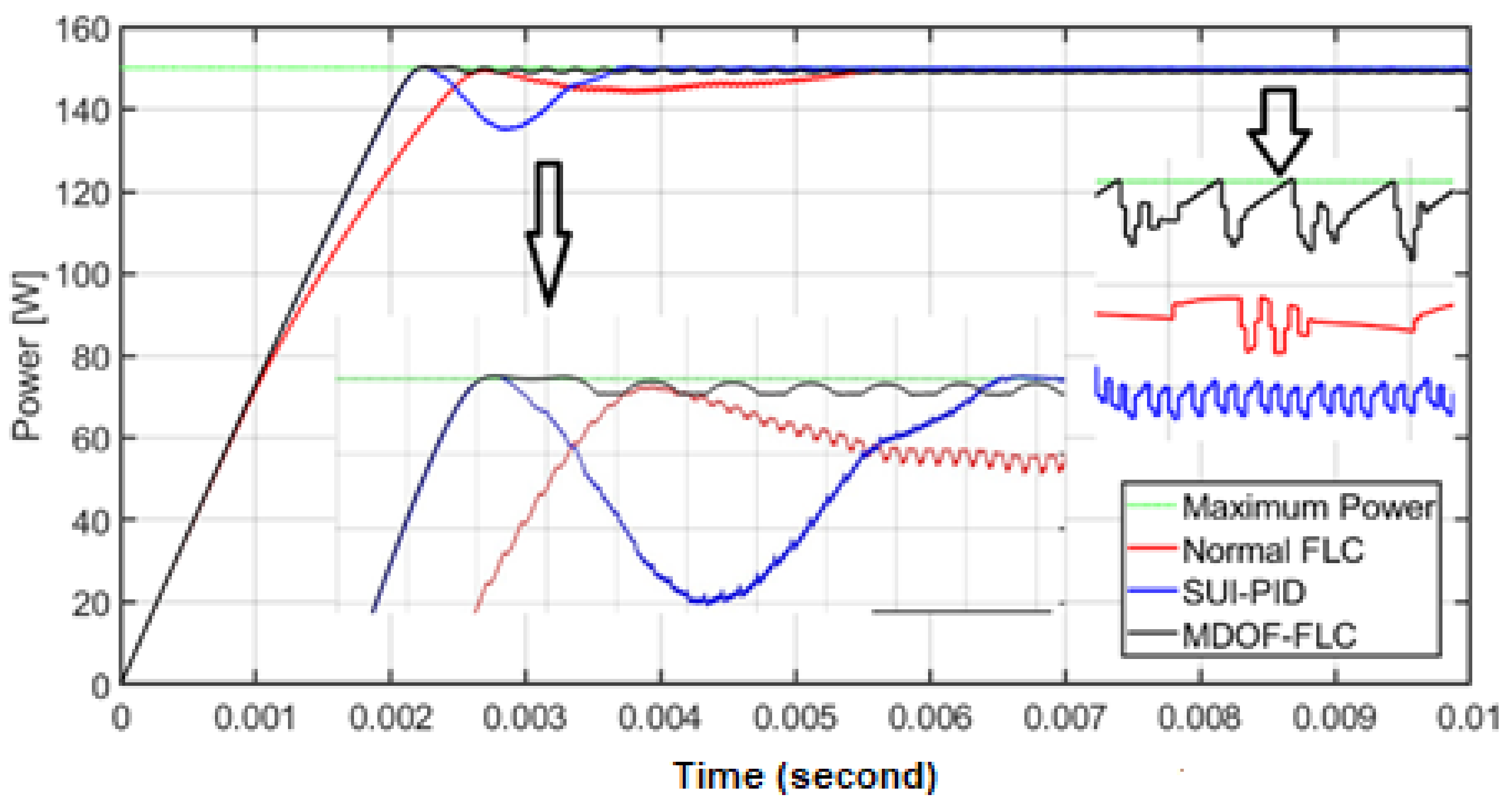
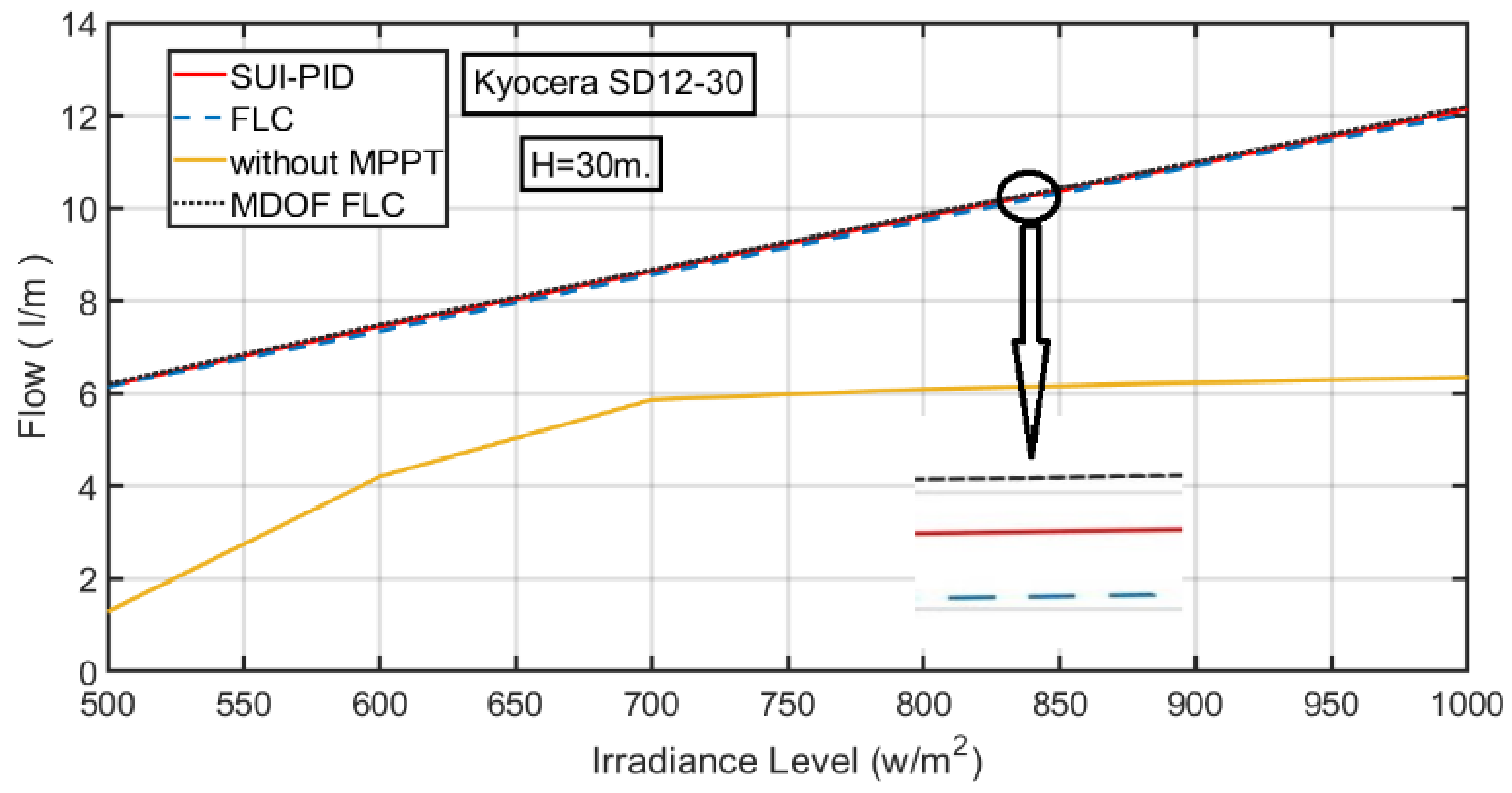
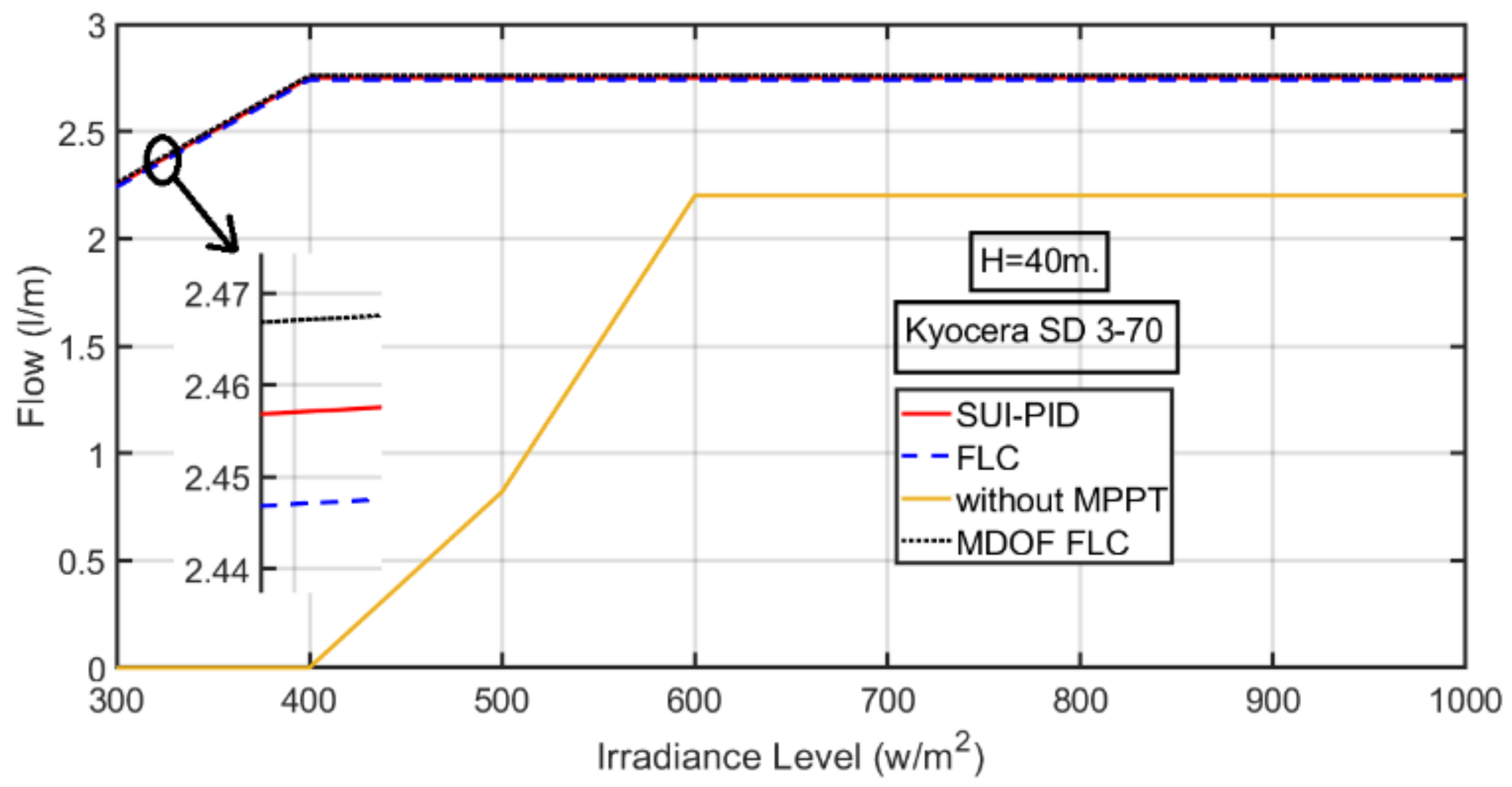
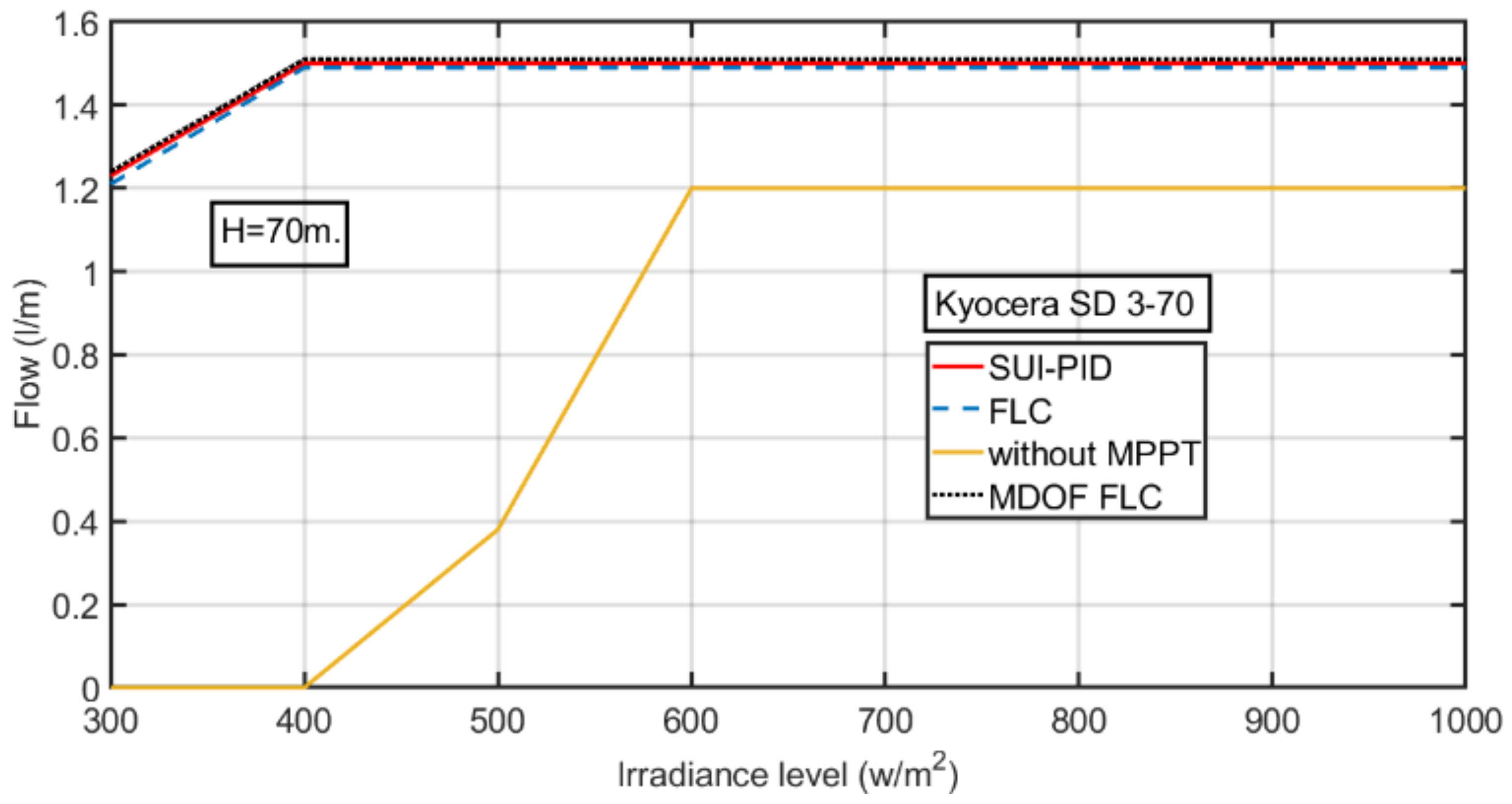
8. Theoretical Results
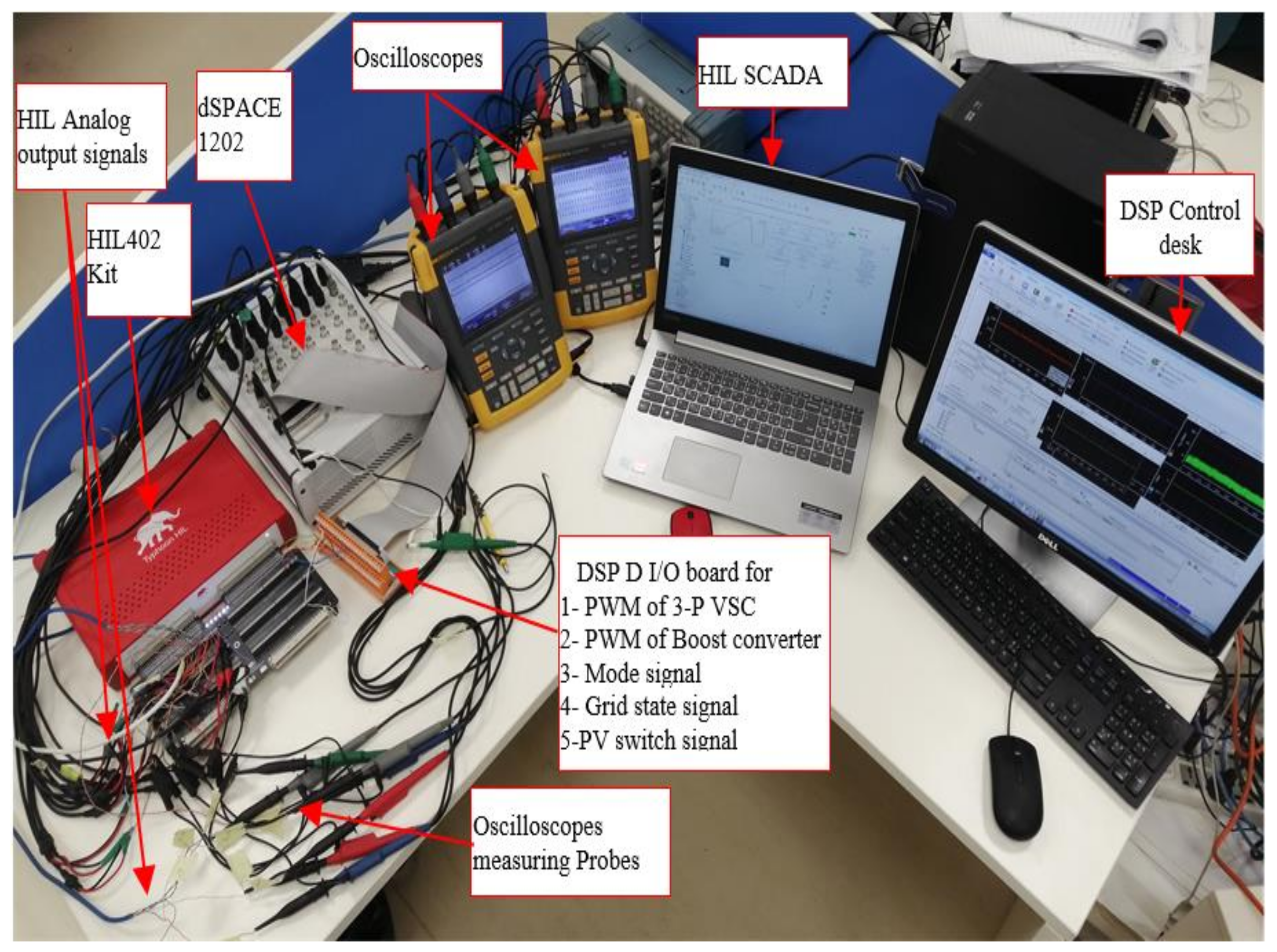
9. Experimental Setup
10. Conclusions
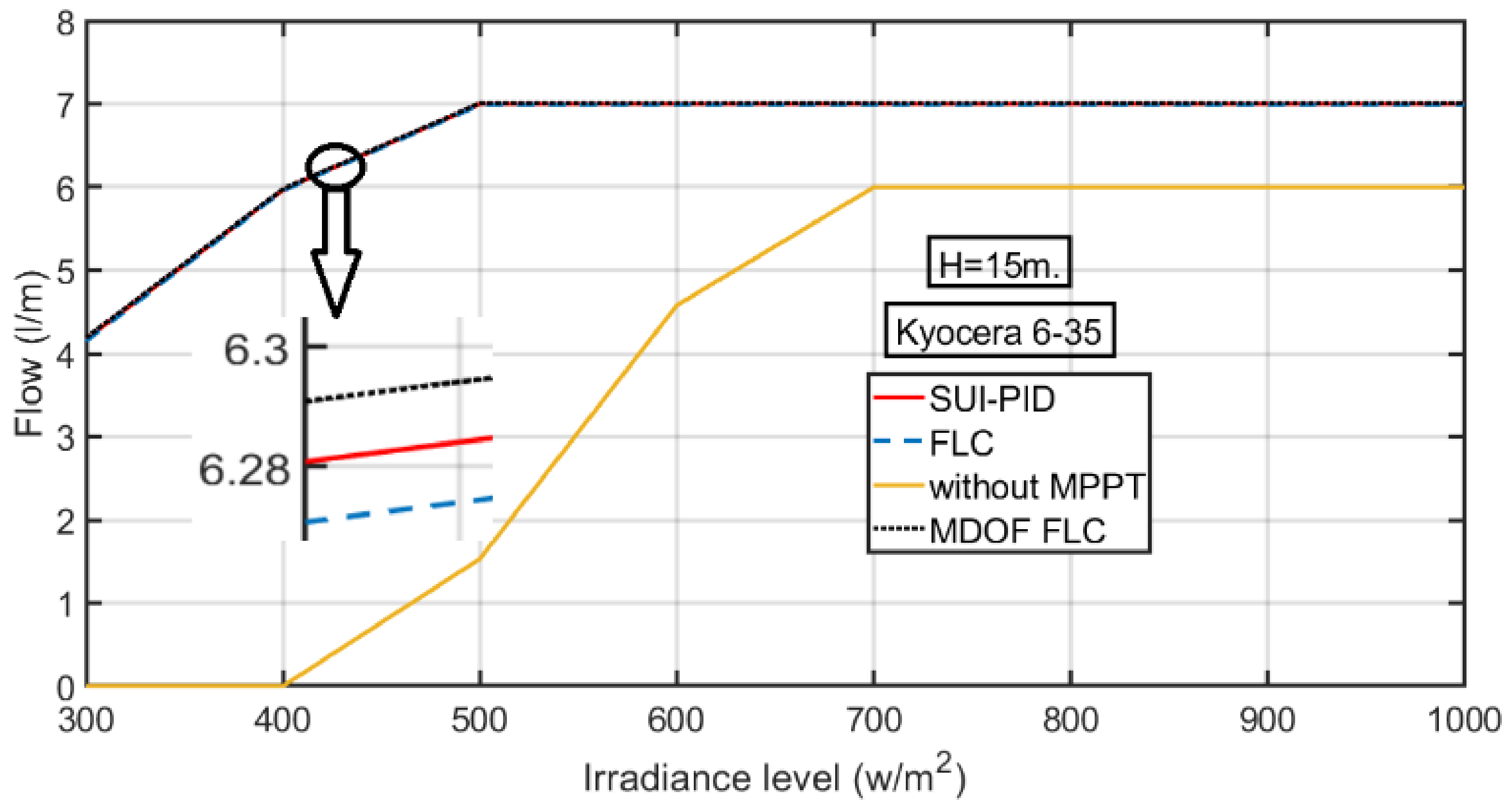
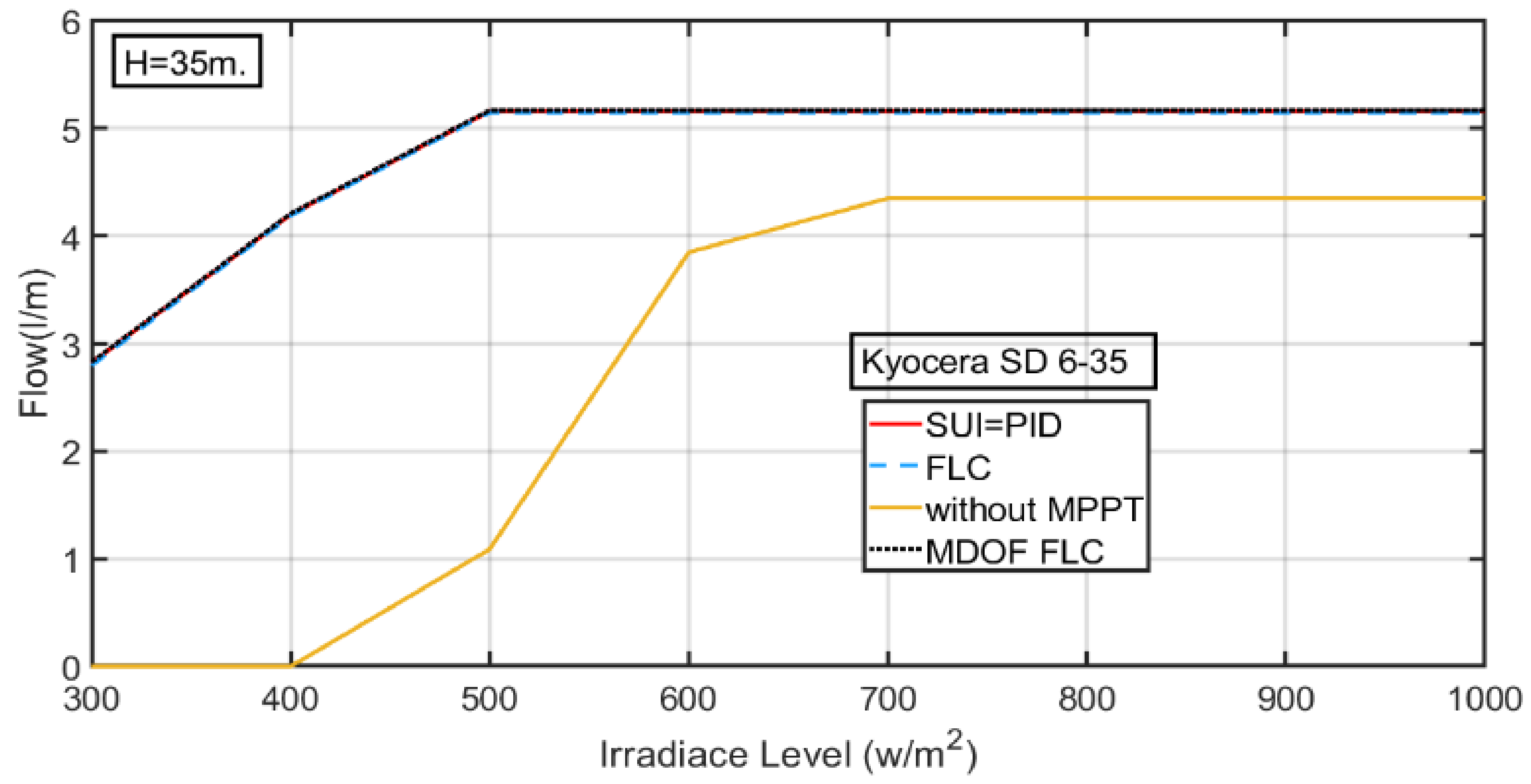
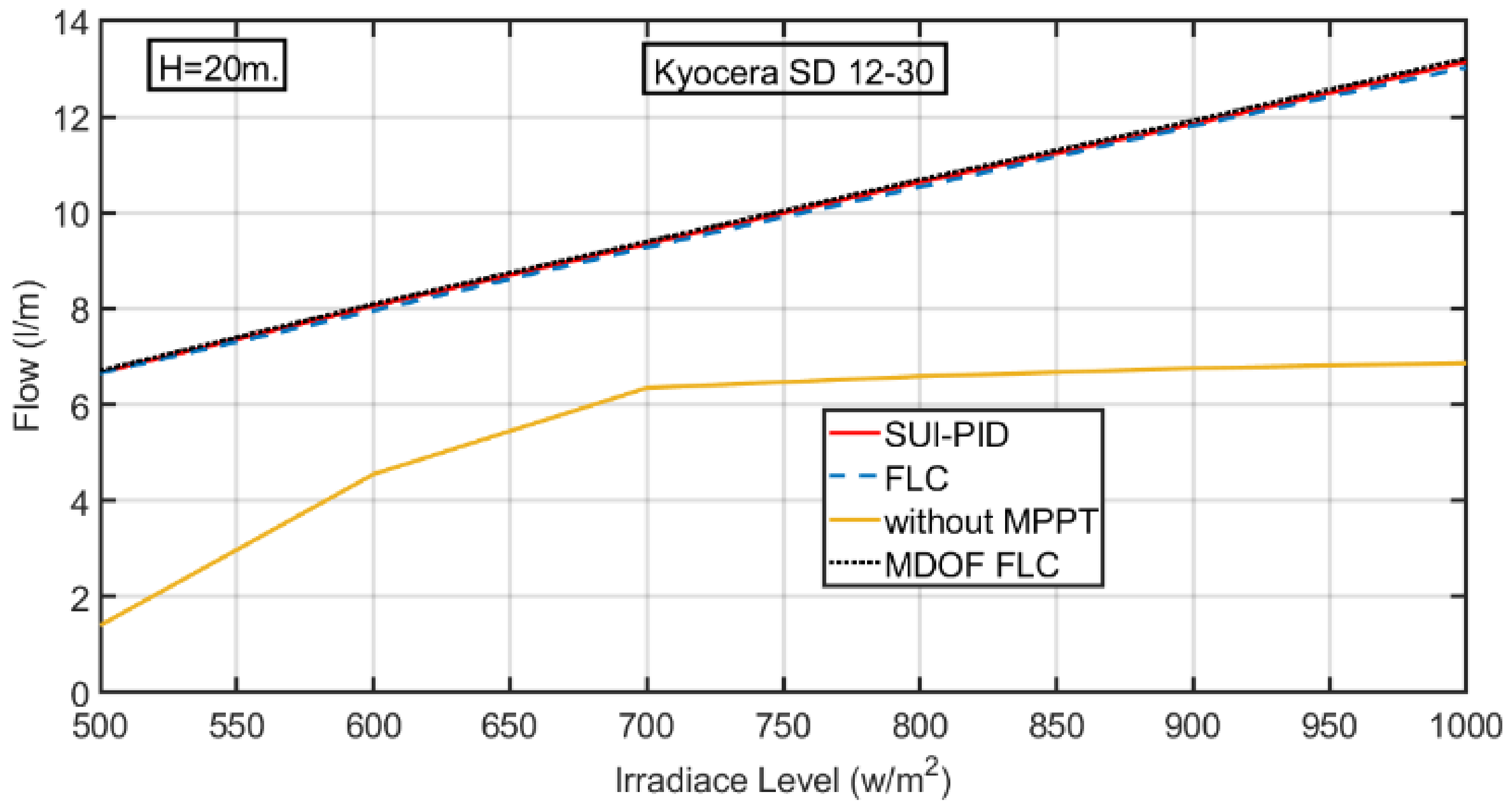
- The MPPT control algorithms increased the water supply flow rate at various irradiance levels. However, the MDOF-FLC has provided a slightly higher water flow rate than the SUI-PID and the FLC.
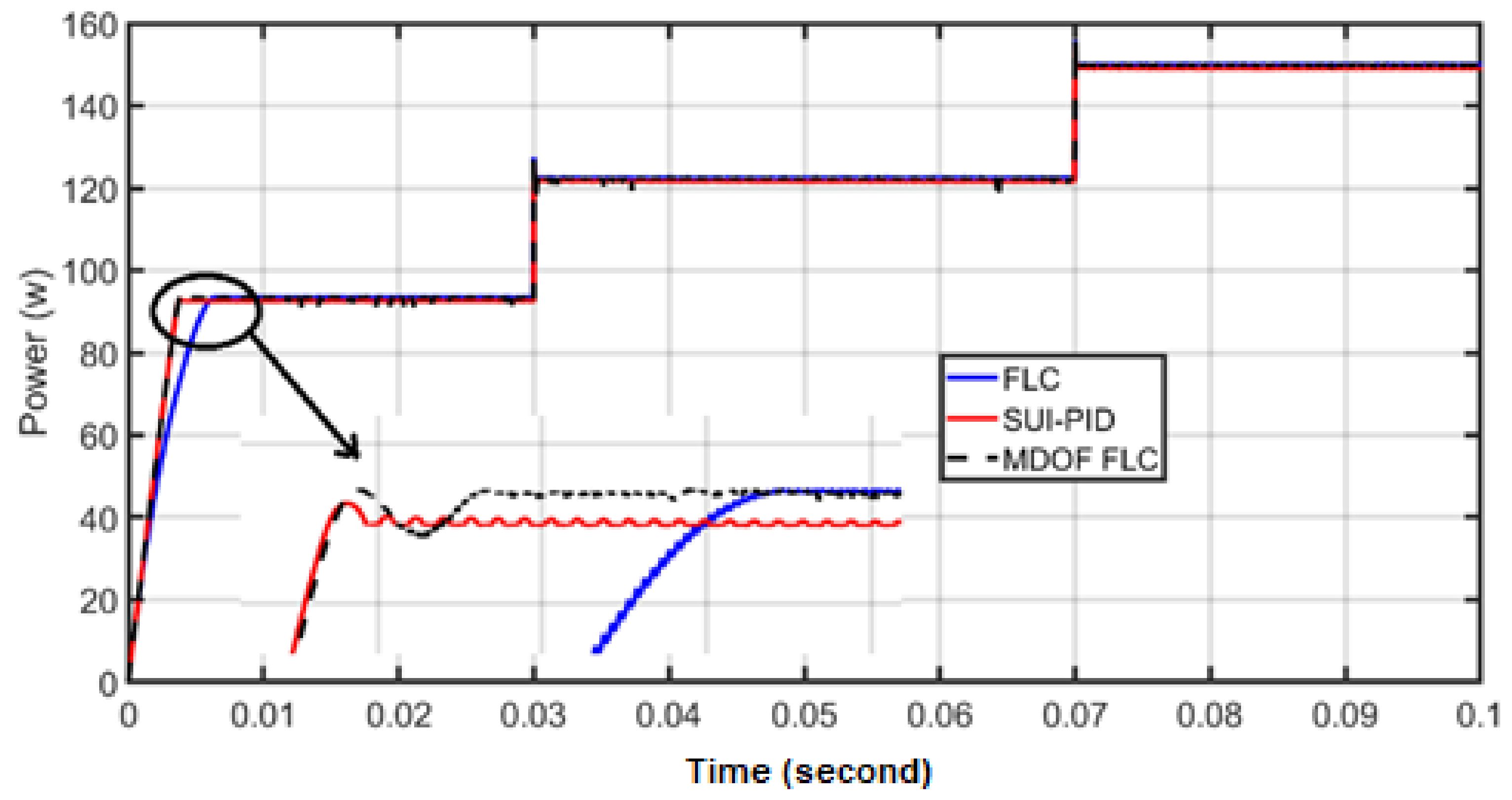
- The MDOF-FLC provided a faster response and a better rise time. The MDOF-FLC reached a steady state at 2.3 milliseconds, the SUI-PID controller at 3.7 milliseconds, and the FLC at 5.5 milliseconds.
- The MDOF-FLC, the SUI-PID controllers, and the normal FLC have a superior ability to track the PV panel MPP under sudden changes in irradiance levels and temperatures.
- The MDOF-FLC is more suitable in the PV array or PV station system, which provides stable electricity for homes or other applications. It has more stability and a better rise time, resulting in a more efficient and accurate process.
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Zaid, S.A.; Albalawi, H.; Alatawi, K.S.; El-Rab, H.W.; El-Shimy, M.E.; Lakhouit, A.; Alhmiedat, T.A.; Kassem, A.M. Novel Fuzzy Controller for a Standalone Electric Vehicle Charging Station Supplied by Photovoltaic Energy. Appl. Syst. Innov. 2021, 4, 63. [Google Scholar] [CrossRef]
- Liu, L.; Meng, X.; Liu, C. A review of maximum power point tracking methods of PV power system at uniform and partial shading. Renew. Sustain. Energy Rev. 2016, 53, 1500–1507. [Google Scholar] [CrossRef]
- Khemliche, M.; Bouamama, B.O.; Bacha, S.; Villa, L.F.L. Bond graph modeling and optimization of photovoltaic pumping system: Simulation and experimental results. Simul. Model. Pract. Theory 2013, 36, 84–103. [Google Scholar]
- Tang, L.; Wang, X.; Xu, W.; Mu, C.; Zhao, B. Maximum power point tracking strategy for photovoltaic system based on fuzzy information diffusion under partial shading conditions. Sol. Energy 2021, 220, 523–534. [Google Scholar] [CrossRef]
- Aldair, A.A.; Obed, A.A.; Halihal, A.F. Design and implementation of ANFIS-reference model controller based MPPT using FPGA for photovoltaic system. Renew. Sustain. Energy Rev. 2018, 82, 2202–2217. [Google Scholar] [CrossRef]
- Li, H.; Yang, D.; Su, W.; Lü, J.; Yu, X. An overall distribution particle swarm optimization MPPT algorithm for photovoltaic system under partial shading. IEEE Trans. Ind. Electron. 2018, 66, 265–275. [Google Scholar] [CrossRef]
- Priyadarshi, N.; Padmanaban, S.; Bhaskar, M.S.; Blaabjerg, F.; Sharma, A. Fuzzy SVPWM-based inverter control realisation of grid integrated photovoltaic-wind system with fuzzy particle swarm optimisation maximum power point tracking algorithm for a grid-connected PV/wind power generation system: Hardware implementation. IET Electr. Power Appl. 2018, 12, 962–971. [Google Scholar] [CrossRef]
- Spier, D.W.; Oggier, G.G.; Da Silva, S.A.O. Dynamic modeling and analysis of the bidirectional DC-DC boost-buck converter for renewable energy applications. Sustain. Energy Technol. Assess. 2019, 34, 133–145. [Google Scholar] [CrossRef]
- Hadjaissa, A.; Ameur, K.; Essounbouli, N. A GA-based optimization of a fuzzy-based MPPT controller for a photovoltaic pumping system, Case study for Laghouat, Algeria. IFAC-Pap. 2016, 49, 692–697. [Google Scholar] [CrossRef]
- Mosaad, M.I.; abed el-Raouf, M.O.; Al-Ahmar, M.A.; Banakher, F.A. Maximum power point tracking of PV system based cuckoo search algorithm; review and comparison. Energy Procedia 2019, 162, 117–126. [Google Scholar] [CrossRef]
- da Rocha, M.V.; Sampaio, L.P.; da Silva, S.A.O. Comparative analysis of MPPT algorithms based on Bat algorithm for PV systems under partial shading condition. Sustain. Energy Technol. Assess. 2020, 40, 100761. [Google Scholar] [CrossRef]
- Chandra, S.; Gaur, P.; Pathak, D. Radial basis function neural network based maximum power point tracking for photovoltaic brushless DC motor connected water pumping system. Comput. Electr. Eng. 2020, 86, 106730. [Google Scholar] [CrossRef]
- El-Khatib, M.F.; Shaaban, S.; El-Sebah, M.I.A. A proposed advanced maximum power point tracking control for a photovoltaic-solar pump system. Sol. Energy 2017, 158, 321–331. [Google Scholar] [CrossRef]
- Hosseinzadeh, M.; Salmasi, F.R. Determination of maximum solar power under shading and converter faults—A prerequisite for failure-tolerant power management systems. Simul. Model. Pract. Theory 2016, 62, 14–30. [Google Scholar] [CrossRef]
- Zhang, X.; Gamage, D.; Wang, B.; Ukil, A. Hybrid Maximum Power Point Tracking Method Based on Iterative Learning Control and Perturb & Observe Method. IEEE Trans. Sustain. Energy 2021, 12, 659–670. [Google Scholar] [CrossRef]
- Kermadi, M.; Berkouk, E. Artificial intelligence-based maximum power point tracking controllers for Photovoltaic systems: Comparative study. Renew. Sustain. Energy Rev. 2017, 69, 369–386. [Google Scholar] [CrossRef]
- Shiau, J.K.; Wei, Y.C.; Chen, B.C. A study on the fuzzy-logic-based solar power MPPT algorithms using different fuzzy input variables. Algorithms 2015, 8, 100–127. [Google Scholar] [CrossRef] [Green Version]
- Mohammed, S.S.; Devaraj, D.; Ahamed, T.I. A novel hybrid Maximum Power Point Tracking Technique using Perturb & Observe algorithm and Learning Automata for solar PV system. Energy 2016, 112, 1096–1106. [Google Scholar]
- Kichou, S.; Silvestre, S.; Guglielminotti, L.; Mora-López, L.; Muñoz-Cerón, E. Comparison of two PV array models for the simulation of PV systems using five different algorithms for the parameters identification. Renew. Energy 2016, 99, 270–279. [Google Scholar] [CrossRef]
- Al-Gizi, A.G. Comparative study of MPPT algorithms under variable resistive load. In Proceedings of the 2016 International Conference on Applied and Theoretical Electricity (ICATE), Craiova, Romania, 6–8 October 2016; pp. 1–6. [Google Scholar]
- Joisher, M.; Singh, D.; Taheri, S.; Espinoza-Trejo, D.R.; Pouresmaeil, E.; Taheri, H. A Hybrid Evolutionary-Based MPPT for Photovoltaic Systems Under Partial Shading Conditions. IEEE Access 2020, 8, 38481–38492. [Google Scholar] [CrossRef]
- Subudhi, B.; Pradhan, R. A comparative study on maximum power point tracking techniques for photovoltaic power systems. IEEE Trans. Sustain. Energy 2012, 4, 89–98. [Google Scholar] [CrossRef]
- Sebah, M.I.A.E. Simplified Universal Intelligent PID controller. Int. J. Eng. Res. 2016, 5, 11–15. [Google Scholar]
- Abu El-Sebah, M.I. PMSM position control with a SUI PID controller. J. Power Electron. 2010, 10, 171–175. [Google Scholar] [CrossRef]
- Khater, F.M.; Ahmed, F.I.; El-Sebah, M.A. Multi degree of freedom fuzzy controller. In Proceedings of the 2003 IEEE International Symposium on Intelligent Control, Houston, TX, USA, 8 October 2003; pp. 293–297. [Google Scholar]
- Farajdadian, S.; Hosseini, S.H. Design of an optimal fuzzy controller to obtain maximum power in solar power generation system. Sol. Energy 2019, 182, 161–178. [Google Scholar] [CrossRef]
- Available online: https://www.manualslib.com/manual/387969/Kyocera-Sd.html?page=2 (accessed on 24 October 2022).
- Available online: https://www.typhoon-hil.com/doc/products/Typhoon-HIL402-brochure.pdf (accessed on 24 October 2022).
- Ortigoza, R.S.; Rodriguez, V.H.G.; Marquez, E.H.; Ponce, M.; Sanchez, J.R.G.; Juarez, J.N.A.; Ortigoza, G.S.; Perez, J.H. A trajectory tracking control for a boost converter-inverter-DC motor combination. IEEE Lat. Am. Trans. 2018, 16, 1008–1014. [Google Scholar] [CrossRef]
- Silva-Ortigoza, R.; Roldán-Caballero, A.; Hernández-Márquez, E.; García-Sánchez, J.R.; Marciano-Melchor, M.; Hernández-Guzmán, V.M.; Silva-Ortigoza, G. Robust Flatness Tracking Control for the “DC/DC Buck Converter-DC Motor” System: Renewable Energy-Based Power Supply. Complexity 2021, 2021, 2158782. [Google Scholar] [CrossRef]
- Zhang, H.; Li, Y.; Gao, D.W.; Zhou, J. Distributed Optimal Energy Management for Energy Internet. IEEE Trans. Ind. Inform. 2017, 13, 3081–3097. [Google Scholar] [CrossRef]
- Liang, B.; Zheng, S.; Ahn, C.K.; Liu, F. Adaptive Fuzzy Control for Fractional-Order Interconnected Systems With Unknown Control Directions. IEEE Trans. Fuzzy Syst. 2022, 30, 75–87. [Google Scholar] [CrossRef]
- Lai, X.; Zhang, P.; Wang, Y.; Chen, L.; Wu, M. Continuous State Feedback Control Based on Intelligent Optimization for First-Order Nonholonomic Systems. IEEE Trans. Syst. Man Cybern. Syst. 2020, 50, 2534–2540. [Google Scholar] [CrossRef]



























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Module Type | BP SX 150S |
|---|---|
| Pmax | 150 Watts |
| Vmax | 34.6 Volts |
| Imax | 4.4 Amperes |
| ISC | 4.8 Amperes |
| VOC | 43.6 Volts |
| Parameters | Value |
|---|---|
| Capacitance | 4.7 μF |
| Inductance | 1 mH |
| Frequency | 25 KHz |
| E CE | NB | N | Z | P | PB |
|---|---|---|---|---|---|
| NB | PS | PB | NB | NB | NS |
| N | PS | PS | NS | NS | NS |
| Z | Z | Z | Z | Z | Z |
| P | NS | NS | PS | PS | PS |
| PB | NS | NB | PB | PB | PB |
| E CE | NB | NS | Z | PS | PB |
|---|---|---|---|---|---|
| NB | NVB | NB | MN | NS | Z |
| NS | NB | NM | NS | Z | PS |
| Z | NM | NS | Z | PS | PM |
| PS | NS | Z | PS | PM | PB |
| PB | Z | PS | PM | PB | PVB |
| DC PM Motor Data | |
|---|---|
| Rated motor Power | 20–150 Watt (W) |
| Armature resistance (Ra) | 0.5 Ohm (Ω) |
| Armature inductance (La) | 1.5 millihenries (mH) |
| Voltage constant (Ke) | 0.67609 Volt/(rad/second) |
| Torque constant (Km) | 0.067609 Newton*meter/Ampere |
| Motor friction (Bm) | 0.02 Newton*Meter |
| Load pump data | |
| Moment of inertia (J) | 0.02365 Kilogram*meter2 |
| Viscous friction coefficient (B) | 0.002387 Newton*meter/(rad/second) |
| Load torque constant (Ke) | 0.39 rad/second |
| MDOF-FLC | SUI-PID | FLC | |
|---|---|---|---|
| ITEA | 0.12 | 0.17 | 0.32 |
| Rising Time | 0.0018 s | 0.0023 s | 0.0037 s |
| Settling Time | 0.0023 s | 0.0037 s | 0.0055 s |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
El-Khatib, M.F.; Sabry, M.-N.; Abu El-Sebah, M.I.; Maged, S.A. Experimental Modeling of a New Multi-Degree-of-Freedom Fuzzy Controller Based Maximum Power Point Tracking from a Photovoltaic System. Appl. Syst. Innov. 2022, 5, 114. https://doi.org/10.3390/asi5060114
El-Khatib MF, Sabry M-N, Abu El-Sebah MI, Maged SA. Experimental Modeling of a New Multi-Degree-of-Freedom Fuzzy Controller Based Maximum Power Point Tracking from a Photovoltaic System. Applied System Innovation. 2022; 5(6):114. https://doi.org/10.3390/asi5060114
Chicago/Turabian StyleEl-Khatib, Mohamed Fawzy, Mohamed-Nabil Sabry, Mohamed I. Abu El-Sebah, and Shady A. Maged. 2022. "Experimental Modeling of a New Multi-Degree-of-Freedom Fuzzy Controller Based Maximum Power Point Tracking from a Photovoltaic System" Applied System Innovation 5, no. 6: 114. https://doi.org/10.3390/asi5060114