
Design of Adaptive-RST Controller for Nonlinear Magnetic Levitation System Using Multiple Zone-Model Approach in Real-Time Experimentation

Abstract
:1. Introduction
2. Magnetic Levitation System (Maglev)
2.1. Magnetic Levitation System Overview
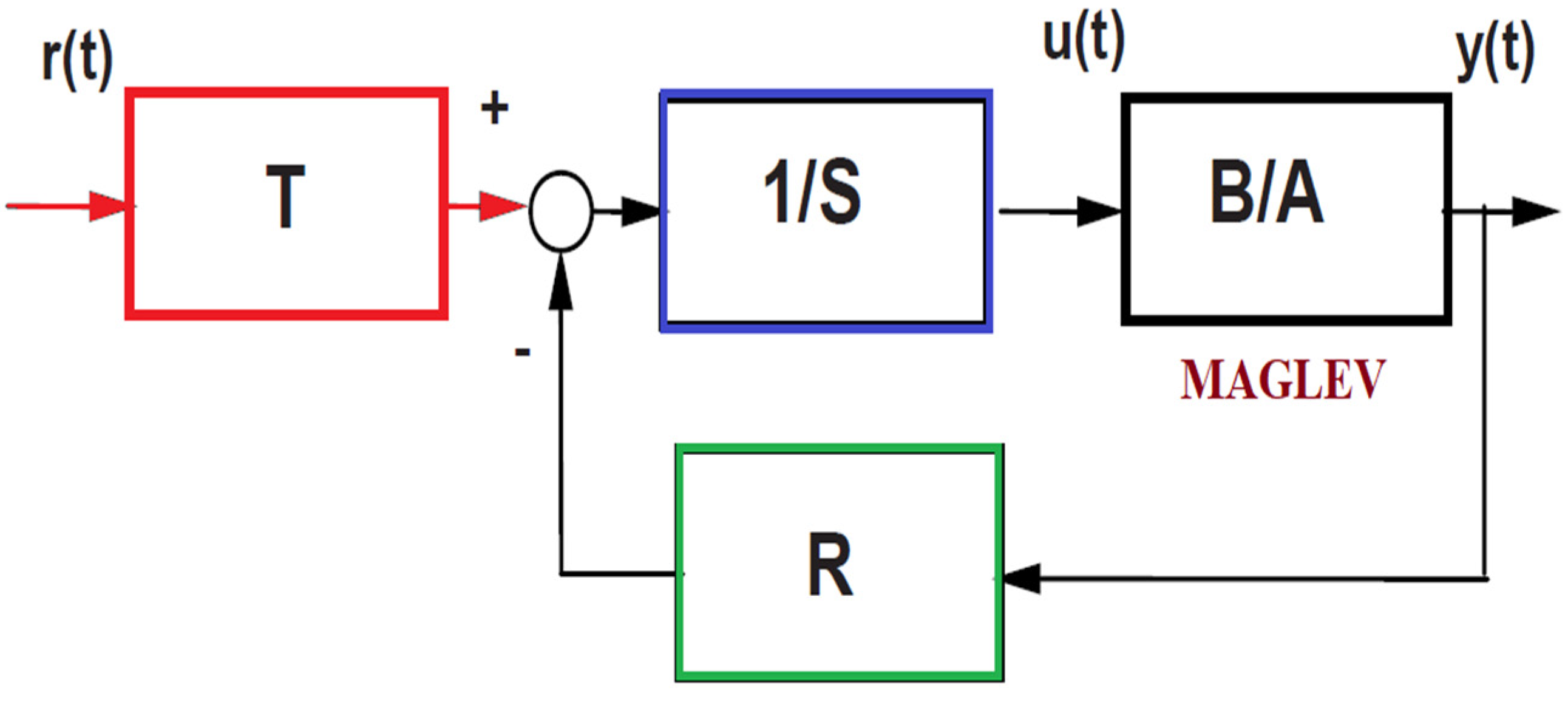
2.2. The (Maglev) System Dynamics
2.3. Description of the Mechanical Model of the Maglev System
2.4. The System Identification Modeling Using Multi Zone-Model Approach
2.5. System Identification Process
3. Control System Design
3.1. RST Controller Design
3.2. RST Controller Parameters Calculation
3.3. Adaptive Supervisor and Switching
- (1)
- When is it appropriate to make the transfer from one model to another? We need to decide which model to use;
- (2)
- When is a switching scheme stable? Will switching stop after a finite time? Will the switching scheme improve performance?
4. Real-Time Implementation and Results
5. Conclusions
- This paper deals with a magnetic-levitation (maglev) system. Real-time experimentation and simulations both confirmed the effectiveness of the maglev transportation system’s control strategy by using multi-model and multi-control approaches;
- The maglev system is nonlinear and very sensitive to disturbances, which is why the set point is divided into three zones to obtain three models;
- The three models were computed using the least-squares identification approach and the generation of pseudo-random signals (PRBS). LabVIEW and WinPIM were utilized in real-time to locate all models;
- The method’s applicability was demonstrated by utilizing a real-time structure with an RST control mechanism, and all parameters of the RST controller were computed by using the WinREG platform;
- Supervisor switching was implemented with two main criteria. The first one is the set point, and the second one is the level of the error;
- On the LabVIEW platform, experimental results are tested by conducting regulation and tracking experiments. The results of the experiments show that this method is very good, with strong response and stability. Smooth and exponential convergence of system variables to their desired levels with three zones;
- The experimental results also showed that the multi-zone model with multi-controller approaches is better with rising time, overshoot, settling time, rejecting the disturbances, and total response;
- The proposed real-time-platform presents an economical solution, not expensive (hardware and software), and more stable when compared with our previous paper [13];
- The obtained results sustain proposed solutions and suggest future steps, such as robustness conditions designed for bumpless switching in multiple model control structures [24];
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Lee, H.W.; Kim, K.C.; Lee, J. Review of maglev train technologies. IEEE Trans. Magn. 2006, 42, 1917–1925. [Google Scholar]
- Kumar, P.; Malik, S.; Toyserkani, E.; Khamesee, M.B. Development of an Electromagnetic Micromanipulator Levitation System for Metal Additive Manufacturing Applications. Micromachines 2022, 13, 585. [Google Scholar] [CrossRef] [PubMed]
- Wang, H.; Liu, B.; Ping, X.; An, Q. Path tracking control for autonomous vehicles based on an improved MPC. IEEE Access 2019, 7, 161064–161073. [Google Scholar] [CrossRef]
- Zhou, R.; Yan, M.; Sun, F.; Jin, J.; Li, Q.; Xu, F.; Zhang, M.; Zhang, X.; Nakano, K. Experimental validations of a magnetic energy-harvesting suspension and its potential application for self-powered sensing. Energy 2022, 239, 122205. [Google Scholar] [CrossRef]
- Yan, L. Development and Application of the Maglev Transportation System. IEEE Trans. Appl. Supercond. 2008, 18, 92–99. [Google Scholar]
- Xu, T.; Yu, J.; Yan, X.; Choi, H.; Zhang, L. Magnetic Actuation Based Motion Control for Microrobots: An Overview. Micromachines 2015, 6, 1346–1364. [Google Scholar] [CrossRef]
- Xu, F.; Zhang, K.; Xu, X. Development of Magnetically Levitated Rotary Table for Repetitive Trajectory Tracking. Sensors 2022, 22, 4270. [Google Scholar] [CrossRef] [PubMed]
- Mourad, A.; Youcef, Z. Adaptive Sliding Mode Control Improved by Fuzzy-PI Controller: Applied to Magnetic Levitation System. Eng. Proc. 2022, 14, 14. [Google Scholar] [CrossRef]
- Al-Muthairi, N.; Zribi, M. Sliding mode control of a magnetic levitation system. Math. Probl. Eng. 2004, 2004, 93–107. [Google Scholar] [CrossRef]
- Zhou, D.; Zhang, T.; Wang, L.; Li, J. Nonlinear Electromagnetic Force Model and Its Application to Magnetic Levitation Control System. In Proceedings of the 2022 8th International Conference on Control, Automation and Robotics (ICCAR), Xiamen, China, 8–10 April 2022; pp. 203–208. [Google Scholar] [CrossRef]
- Boonsatit, N.; Pukdeboon, C. Adaptive fast terminal sliding mode control of magnetic levitation system. J. Control Autom. Electr. Syst. 2016, 27, 359–367. [Google Scholar] [CrossRef]
- Ismail, L.S.; Petrescu, C.; Lupu, C.; Luu, D.L. Design of Optimal PID Controller for Magnetic Levitation System Using Linear Quadratic Regulator Approach. In Proceedings of the 2020 International Symposium on Fundamentals of Electrical Engineering (ISFEE), Bucharest, Romania, 5–7 November 2020; pp. 1–6. [Google Scholar] [CrossRef]
- Ismail, L.S.; Lupu, C.; Alshareefi, H.; Luu, D.L. Design of PID controller for nonlinear Maglev system using Fuzzy-Tuning approach. U.P.B. Sci. Bull. Ser. C 2022, 84, 45–62. [Google Scholar]
- Wong, T. Design of a magnetic levitation system—An undergraduate project. IEEE Trans. Educ. 1986, E-29, 196–200. [Google Scholar]
- Landau, I.D.; Zito, G. Digital Control Systems; Springer: London, UK, 2006. [Google Scholar]
- Fang, H.; Dianat, S.; Mestha, L.K.; Radomski, A. Developing a linear model of RF power generators with pseudo random binary signals (PRBS). In Proceedings of the 2014 14th International Conference on Control, Automation and Systems (ICCAS 2014), Gyeonggi-do, Korea, 22–25 October 2014; pp. 1158–1162. [Google Scholar] [CrossRef]
- Lupu, C.; Popescu, D.; Ciubotaru, B.; Petrescu, C.; Florea, G. Switching solution for multiple-model control systems. In Proceedings of the 14th Mediterranean Conference on Control Autom, Ancona, Italy, 28–30 June 2006. [Google Scholar]
- Liu, S.; Dong, R.; Chen, X. Application of the Main Steam Temperature Control Based on Sliding Multi-Level Multi-Model Predictive Control. In Proceedings of the 2017 International Conference on Computer Systems, Electronics and Control (ICCSEC), Dalian, China, 25–27 December 2017; pp. 875–880. [Google Scholar] [CrossRef]
- Popescu, D.; Stefanoiu, D.; Lupu, C.; Ciubotaru, B.; Petrescu, C.; Dimon, C. Automatica Industrial; Agir: Bucharest, Romania, 2006. [Google Scholar]
- Lehouche, H.; Guéguen, H.; Mendil, B. Set-point supervisory control methodology for a nonlinear continuous stirred tank reactor process. Arab. J. Sci. Eng. 2012, 37, 831–849. [Google Scholar] [CrossRef]
- Balakrishnan, J. Control System Design Using Multiple Models, Switching and Tuning. Ph.D. Dissertation, University of Yale, New Haven, CT, USA, 1996. [Google Scholar]
- Narendra, K.S.; Driollet, O.A.; Feiler, M.; George, K. Adaptive control using multiple models, switching and tuning. Int. J. Adapt. Control Signal Process. 2003, 17, 87–102. [Google Scholar] [CrossRef]
- National Instruments Corporation. Available online: https://www.ni.com (accessed on 24 July 2022).
- Lupu, C.; Nasture, A.M.; Ismail, L.S.; Lupu, M. Safety Concerning for Algorithms Switching in Multiple Model Control Structures. In Proceedings of the 2020 24th International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 8–10 October 2020. [Google Scholar]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Controller Types | Overshoot | Settling Time | Rise Time | Disturbances |
|---|---|---|---|---|
| 8.33% | 1.1 | 0.36 | Not good | |
| 16.4% | 1.4 | 0.373 | Not good | |
| 1.1% | 0.81 | 0.312 | Good |
| Controller Types | Overshoot | Settling Time | Rise Time | Oscillations |
|---|---|---|---|---|
| 7.78% | 0.94 | 0.32 | Very small | |
| 1.1% | 0.81 | 0.312 | No |
| Controller Types | Overshoot | Settling Time | Rise Time | Disturbances |
|---|---|---|---|---|
| 5.72% | 0.85 | 0.68 | Good | |
| 1.1% | 0.81 | 0.312 | Good |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ismail, L.S.; Lupu, C.; Alshareefi, H. Design of Adaptive-RST Controller for Nonlinear Magnetic Levitation System Using Multiple Zone-Model Approach in Real-Time Experimentation. Appl. Syst. Innov. 2022, 5, 93. https://doi.org/10.3390/asi5050093
Ismail LS, Lupu C, Alshareefi H. Design of Adaptive-RST Controller for Nonlinear Magnetic Levitation System Using Multiple Zone-Model Approach in Real-Time Experimentation. Applied System Innovation. 2022; 5(5):93. https://doi.org/10.3390/asi5050093
Chicago/Turabian StyleIsmail, Laith S., Ciprian Lupu, and Hamid Alshareefi. 2022. "Design of Adaptive-RST Controller for Nonlinear Magnetic Levitation System Using Multiple Zone-Model Approach in Real-Time Experimentation" Applied System Innovation 5, no. 5: 93. https://doi.org/10.3390/asi5050093