
Anomaly Detection for Data from Unmanned Systems via Improved Graph Neural Networks with Attention Mechanism
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Problem Definition
- Dt: Time series data as input.
- : Index of nodes in the graph for the sensing data time series.
- : Similarity of the multivariate time series, , , and denotes the number of nodes in the graph.
- : Relationship between nodes, representing the edge from node to node , i.e., the directed relation between node and node .
- : Similarity between the embedding vector and its candidate relation .
- : Input value with time information.
- : Normalized value of time information.
- : Final hidden vector matrix encoded.
- : Prediction result by multichannel attention after linear transformation.
- : Prediction result after multi-channel data fusion.
- : Deviation between predicted and measured values.
- : Deviation after normalization.
- : Exception score after aggregation of the function.
- : Exception score after simple moving average (SMA) processing.
2.2. The Framework of GNN
2.3. GTAF Model
2.3.1. Main Idea
- (1)
- Relevance learning: According to the sensing data inputted, graph nodes embedding vectors are set up, and then the directed graph is constructed so as to associate the features in sensing data and facilitate information exchange. After that, the similarity between vectors embedded in the nodes and their candidate relationships are calculated.
- (2)
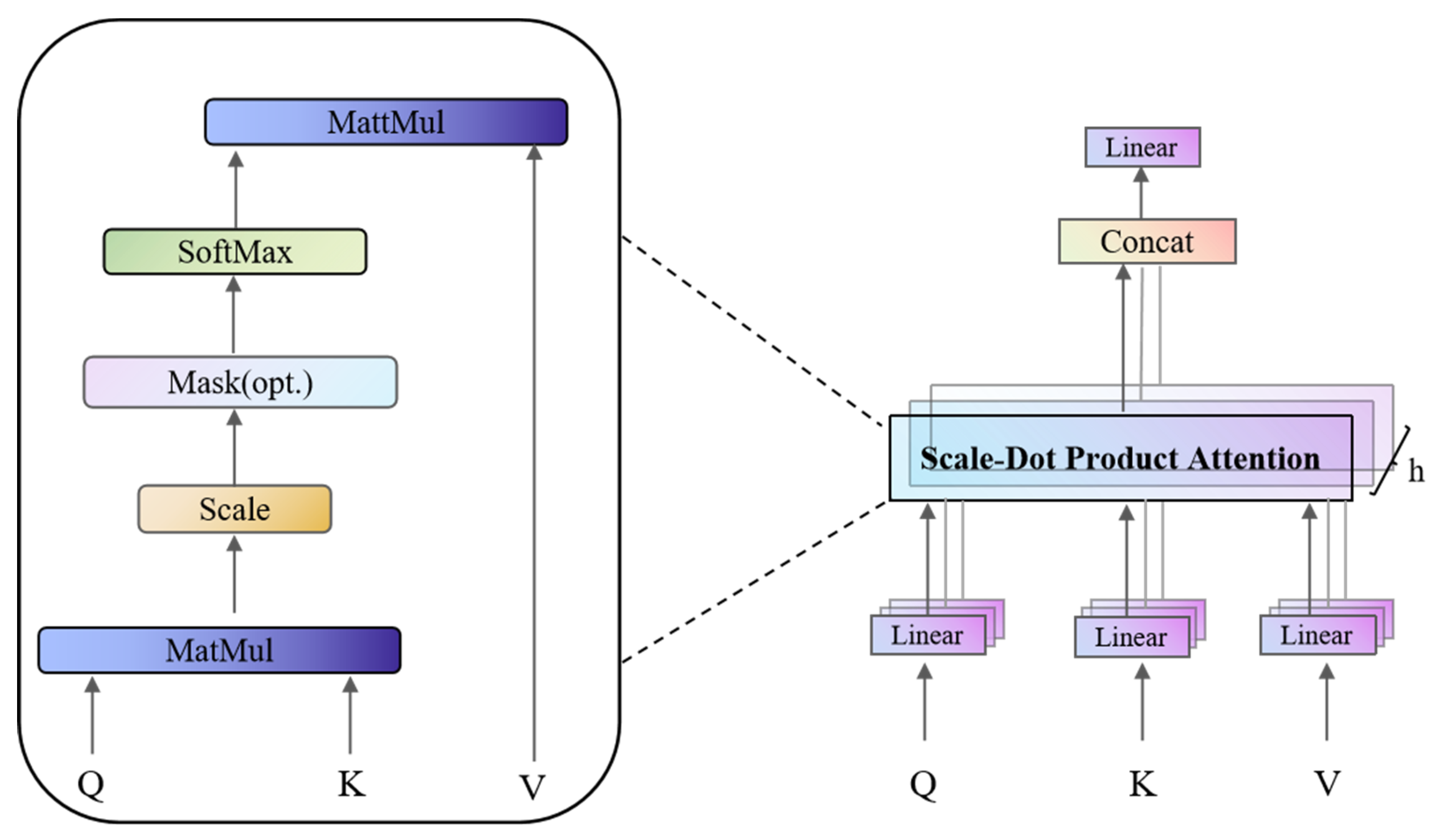
- Prediction with Transformer and GAT: The sensing data contextual information vectors are obtained using Transformer. The temporal information is processed and fed into the multi-headed attention mechanism, and then layer normalization is performed to prevent gradient disappearance or gradient explosion. The interdependencies between the multivariate sequences are captured using the graph attention network (GAT), and finally the prediction results are obtained.
- (3)
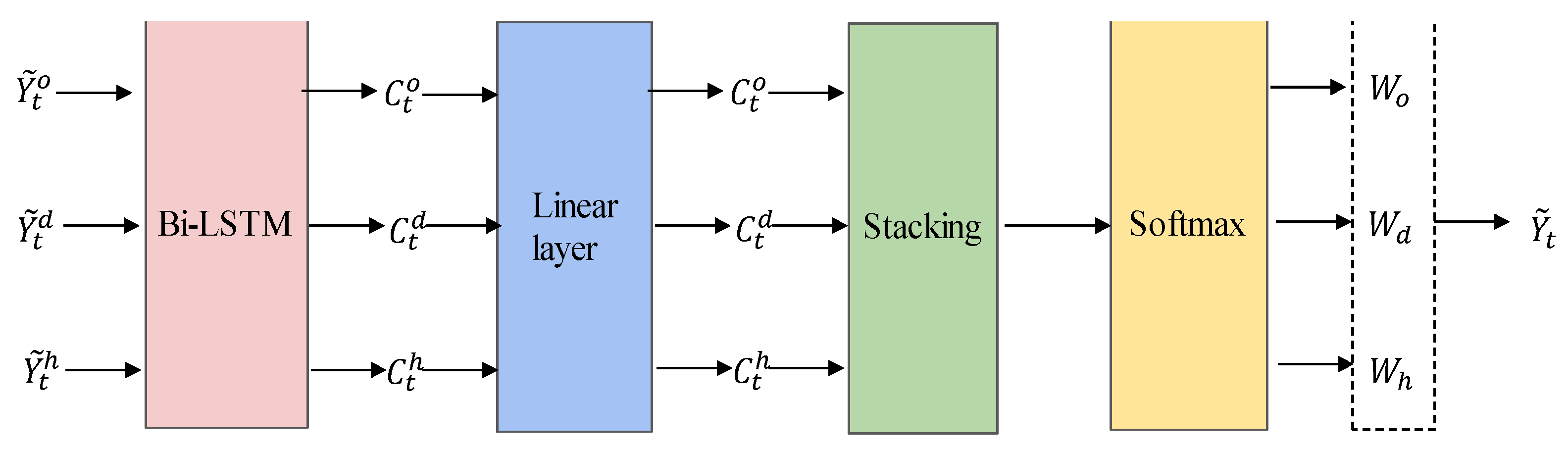
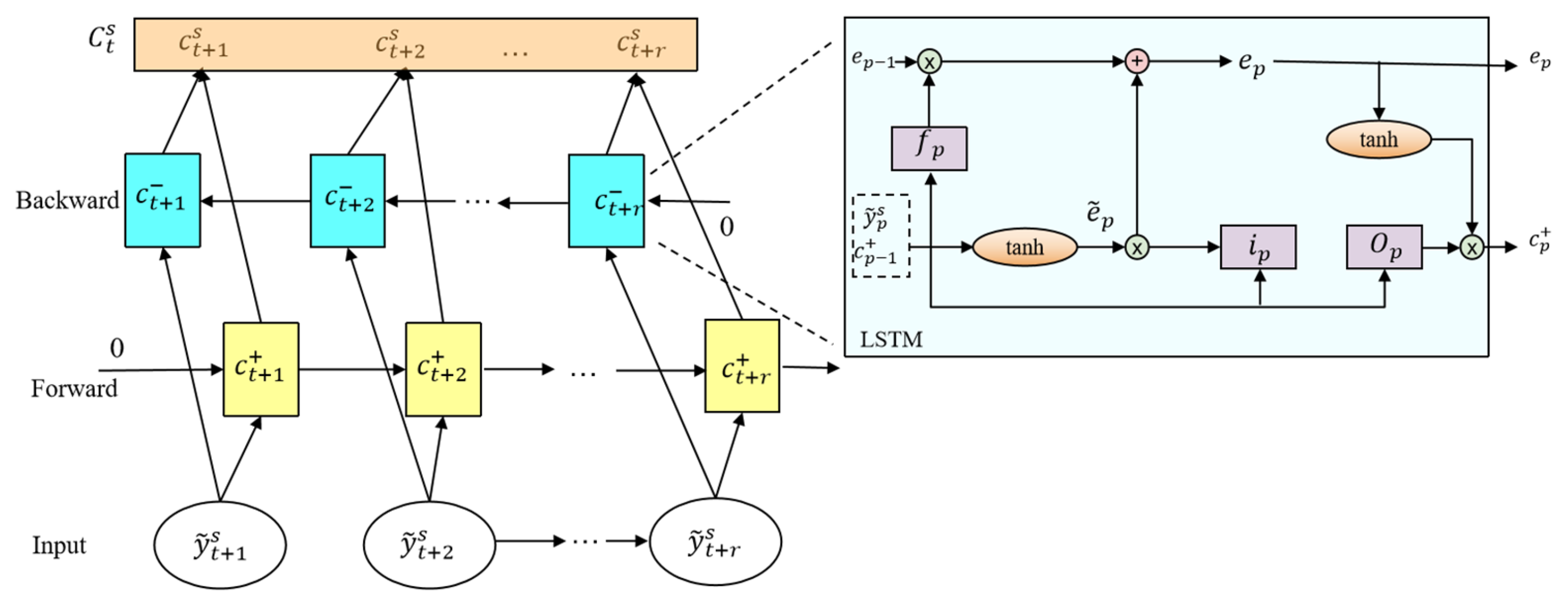
- Multi-channel data fusion: Based on the multi-channel transformer mechanism, the characteristics of different sensing data are integrated using the bi-directional long short-term memory network (Bi-LSTM) [32] as the structure for computing channel attention, and then the results of different channels are evaluated and aggregated according to the evaluation weights; the mean square error is used as the loss function.
- (4)
- Anomaly judgement: The deviation between the predicted value and the observed value is calculated, normalized and then aggregated using an aggregative function to obtain the score for the final anomaly judgement.
2.3.2. Relevance Learning
- (1)
- Vector definition
- (2)
- Establishment of directed graph
- (3)
- Similarity calculation
2.3.3. Prediction with Transformer and GAT
- (1)
- Embedding temporal information
- (2)
- Layer normalization
- (3)
- Dependency capture
- (4)
- Decoding
2.3.4. Multi-Channel Data Fusion
- (1)
- Evaluation of channel attentions
- (2)
- Aggregation
- (3)
- Error minimization
2.3.5. Anomaly Judgement
2.4. Datasets
- (1)
- GFTD [37]
- (2)
- SMAP [39]
2.5. Design of Experiments
2.5.1. Model Parameters
2.5.2. Environment of Experiments
2.5.3. Evaluation Indicators
2.5.4. Control Methods
- (1)
- iForest is an efficient anomaly detection method based on ensembles, which treats points that are sparsely distributed and far from the high-density population as anomalies. iForest has linear time complexity and is suitable for anomaly detection of large-scale data, but a large amount of dimensional information that is still unused after the random forest is constructed because each cut is a random selection of 1 dimension. This makes the method not suitable for high-dimensional time series anomaly detection.
- (2)
- LOF is a method for detecting outliers in a multidimensional dataset. It introduced a local outlier factor (LOF) for each object in the dataset, indicating its outlier degree, which quantifies how much of an outlier an object is. The outlier factor is local, i.e., only the restricted neighborhood of each object is considered. The method is loosely related to density-based clustering. However, it does not require any explicit or implicit notion of clustering.
- (3)
- DAGMM is an unsupervised deep learning model based on a self-encoder and a Gaussian mixture model. The low-dimensional representation of the input and the reconstruction error are obtained by a deep self-encoder, and the multidimensional time series are modelled by a multilayer recurrent neural network. The model is then optimized by the reconstruction error and the Gaussian mixture function likelihood function, and the decoupled training of the two networks makes the overall model more robust. However, such circular optimization leads to slow training of the model and a lack of capture of dependencies between the metrics.
- (4)
- OmniAnomaly is a stochastic recurrent neural network that utilizes random variable concatenation and planar normalized flow to obtain the normal patterns of multivariate time series by learning their robust representations, reconstructing the input data through feature representations and using reconstruction probabilities to identify anomalies. The method combines gated recurrent units (GRU) and VAE [40], and the model takes into account both the time-dependence and the stochasticity of multi-dimensional time series.
- (5)
- LSTM-VAE [41]: LSTM [42] is a recurrent neural network that captures time-dependent behaviors but does not suffer from the problem of vanishing gradients. LSTM-VAE uses LSTM and VAE layers connected serially to project multimodal observations and their temporal dependencies into the latent space at each time step. Because LSTM is designed to be suitable for processing temporal data, LSTM-VAE is able to learn rich temporal dependencies.
- (6)
- THOC [43] is a time-domain single-class classification model for time series anomaly detection that captures temporal dynamics at multiple scales using an extended recurrent neural network with jump connections. Using multiple hyperspheres obtained by a hierarchical clustering process, a class of targets called multiscale V-vector data descriptions is defined. This allows a set of multi-resolution temporal clusters to capture temporal dynamics well. To further facilitate representation learning, the method drives the hypersphere centers to be orthogonal to each other and adds a self-supervised task to the temporal domain.
- (7)
- GDN is a multidimensional time series anomaly detection method based on graph neural networks, which learns the relationship graph between data patterns and obtains anomaly scores through prediction and deviation scoring based on an attention mechanism. It is an excellent deep model for multidimensional time series anomaly detection because it can effectively learn inter-dimensional dependencies and has good interpretability for inter-dimensional deviation anomalies by constructing inter-dimensional dependency graphs through graph neural networks.
2.5.5. Scheme of Experiments
- (1)
- Correlation among attributes: In order to verify the influence of different attributes on the GTAF anomaly detection model, the correlation analysis of the attributes in the GFTD dataset was carried out using Spearman’s correlation coefficients as a way to analyze the possible influence of the relevant attributes on the anomaly detection results of the sensing data.
- (2)
- Comparison experiments for anomaly detection: In order to verify the performance of GTAF, the model proposed in the paper, GTAF and several other models such as iForest, LOF, DAGMM, OmniAnomaly, LSTM-VAE, THOC and GDN are used to conduct experiments on the sensing data from the two datasets GFTD and SMAP so as to compare their performances in anomaly detection. For each anomaly detection model, the performance of the various models was evaluated using precision, recall and F1 scores.
- (3)
- Evaluation for anomaly types: In order to analyze the ability to detect different types of anomalies such as point anomalies, collective anomalies and associated anomalies in GFTD data, and to analyze the impact of the proportion of anomalous data on the detection performance, two sub-datasets of temperature and current were constructed by selecting some data from the GFTD dataset, the temperature sub-dataset containing TB2, TB3, TB8 and TB9, and the current sub-dataset containing IB1 and IB2. Similarly, the SMAP dataset is also divided into four sub-datasets, L1, L2, L3 and L4, to analyze the anomaly detection of the GTAF model in each dataset.
- (4)
- Ablation experiments: To verify the effect of each improvement feature of GTAF, some variant models, such as GTA, GTF, GT and TAF, were constructed by eliminating parts of features of GTAF. These variant models and GTAF were used on the datasets GFTD and SMAP, and their performances were compared.
- (5)
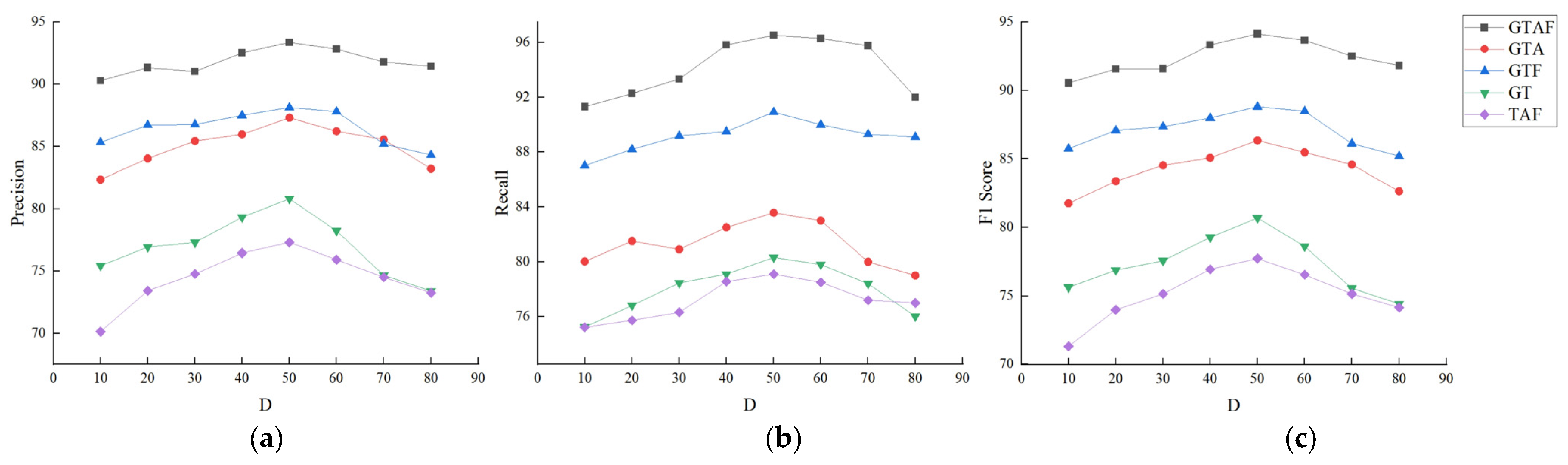
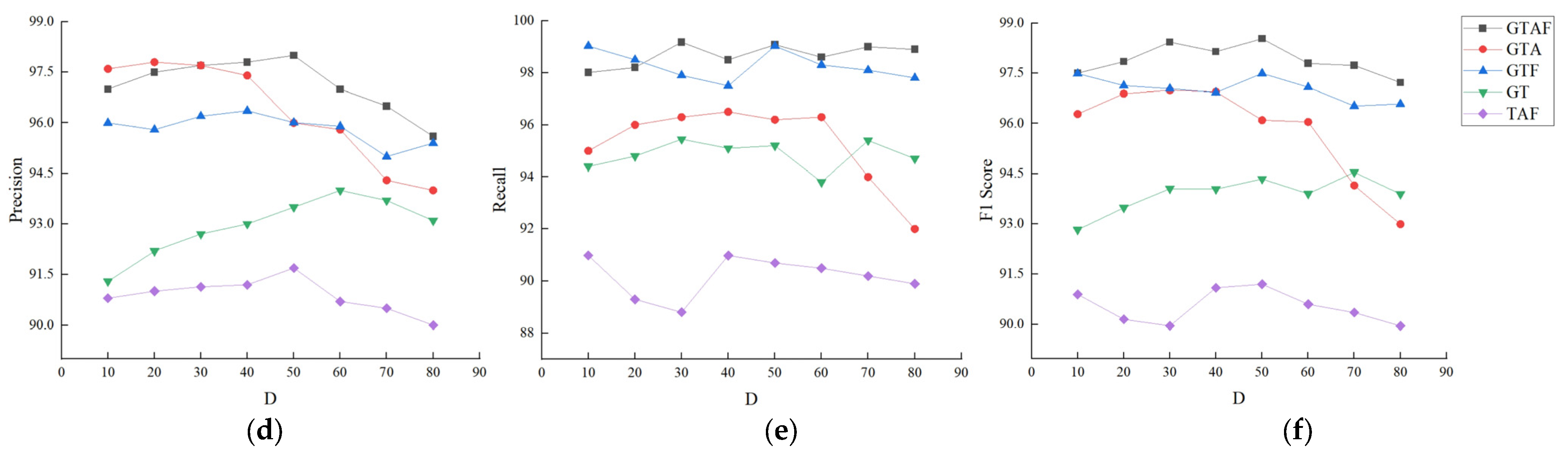
- Parameter sensitivity: In order to study the parameter sensitivity of the model and explore the anomaly detection performance of the model under different model combinations, parameter sensitivity experiments were conducted. The parameter values of GTAF and the four variant models GTA, GTF, GT, and TAF on the datasets GFTD and SMAP are compared and analyzed.
3. Results and Discussion
3.1. Attribute Correlation of GFTD Dataset
3.2. Comparison Experiments for Anomaly Detection
3.2.1. Anomaly Detection for GFTD Dataset
3.2.2. Anomaly Detection for SMAP Dataset
3.3. Evaluation for Anomaly Types
3.3.1. Anomaly Types in GFTD Dataset
3.3.2. Anomaly Types in SMAP Dataset
3.4. Ablation Experiments
- (1)
- GTAF: the full model proposed in this paper, which uses the transformer model, the graph attention network and the multi-channel fusion module on the basis of GDN.
- (2)
- GTA: GTAF w/o F, i.e., the multichannel fusion module is removed from GTAF.
- (3)
- GTF: GTAF w/o A, i.e., the graph attention network is removed from GTAF.
- (4)
- GT: GTAF w/o AF, i.e., the graph attention network and multi-channel fusion module are removed from GTAF.
- (5)
- TAF: GTAF w/o G, i.e., the directed graph part for the correlation learning is removed from GTAF.
3.5. Parameter Sensitivity
4. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Sun, X.C.; Chen, X.P. Design of UAV flight control system fault diagnosis expert system. In Equipment Manufacturing Technology; University of Wollongong: Wollongong, NSW, Australia, 2012; pp. 66–68. [Google Scholar]
- Liu, H.Z. Research on Intelligent Diagnosis System of UAV Flight Control Fault Based on Machine Learning; University of Electronic Science and Technology of China: Chengdu, China, 2019; pp. 20–25. [Google Scholar]
- Singh, S.; Murthy, T.V.R. An Expert System Based Sensor Fault Accommodation for Lateral Dynamics of Aircraft Models. Eur. J. Mol. Clin. Med. 2020, 7, 2904–2916. [Google Scholar]
- Qing, L.Y. Research on Airplane Fault Prognosis and Diagnosis System Based on Flight Data; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2007. [Google Scholar]
- Chen, M.; Pan, Z.; Chi, C.; Ma, J.; Hu, F.; Wu, J. Research on UAV Wing Structure Health Monitoring Technology Based on Finite Element Simulation Analysis. In Proceedings of the 2020 International Conference on Prognostics and System Health Management, Jinan, China, 23–25 October 2020; IEEE: Piscataway, NJ, USA; pp. 86–90. [Google Scholar]
- Tan, J. Research on Fault Diagnosis Technology of Flight Control System Based on Analytical Model; Nanjing University of Aeronautics and Astronautics: Nanjing, China, 2020; pp. 12–15. [Google Scholar]
- Melnyk, I.; Matthews, B.; Valizadegan, H.; Banerjee, A.; Oza, N. Vector autoregressive model-based anomaly detection in aviation systems. J. Aerosp. Inf. Syst. 2016, 13, 1–13. [Google Scholar] [CrossRef]
- Liu, Z.C.; Guo, L.J. Fault detection technology for UAV control system based on hierarchical filtering algorithm. Comput. Meas. Control 2020, 28, 23–26. [Google Scholar]
- Yang, X.Y.; Yang, J.; Zhang, W.Y.; Guo, X.F.; Yang, Q.; Dong, W. Measurement data fusion model of a turbofan engine. J. Aerosp. Power 2020, 35, 641–650. [Google Scholar]
- Bronz, M.; Baskaya, E.; Delahaye, D.; Puechmore, S. Real-time fault detection on small fixed-wing UAVs using machine learning. In Proceedings of the 2020 AIAA/IEEE 39th Digital Avionics Systems Conference (DASC), San Antonio, TX, USA, 11–16 October 2020; pp. 1–10. [Google Scholar]
- Yaman, O.; Yol, F.; Altinors, A. A Fault Detection Method Based on Embedded Feature Extraction and SVM Classification for UAV Motors. Microprocess. Microsyst. 2022, 94, 104683. [Google Scholar] [CrossRef]
- Pan, P.F. Condition monitoring and fault diagnosis of aero engines based on test flight data. Propuls. Technol. 2021, 42, 2826–2837. [Google Scholar]
- Lv, C.; Cheng, G.; Liu, Y.Q. Aero-engine fault data tagging based on BDPCA clustering algorithm. Vib. Shock 2020, 39, 35–41. [Google Scholar]
- Pan, D.; Nie, L.; Kang, W.; Song, Z. UAV anomaly detection using active learning and improved S3VM model. In Proceedings of the 2020 International Conference on Sensing, Measurement & Data Analytics in the era of Artificial Intelligence (ICSMD), Xi’an, China, 15–17 October 2020; pp. 253–258. [Google Scholar]
- Ahmad, A.; Zouhair, D. Using MLSTM and multioutput convolutional LSTM algorithms for detecting anomalous patterns in streamed data of unmanned aerial vehicles. IEEE Aerosp. Electr. Syst. Mag. 2022, 37, 6–15. [Google Scholar]
- You, J.T.; Liang, J.; Liu, D.T. An Adaptable UAV Sensor Data Anomaly Detection Method Based on TCN Model Transferring. In Proceedings of the 2022 Prognostics and Health Management Conference, Turin, Italy, 6–8 July 2022; IEEE: Piscataway, NJ, USA; pp. 73–76. [Google Scholar]
- Li, C.; Wang, B.H.; Tian, J.W.; Wang, R.X. Anomaly detection method for UAV sensor data based on LSTM-OCSVM. J. Chin. Comput. Syst. 2021, 42, 700–705. [Google Scholar]
- Kim, J.; Kang, H.; Kang, P. Time-series anomaly detection with stacked Transformer representations and 1D convolutional network. Eng. Appl. Artif. Intell. 2023, 120, 105964. [Google Scholar] [CrossRef]
- Saraswat, D.; Bhattacharya, P.; Zuhair, M.; Verma, A.; Kumar, A. AnSMart: A SVM-based anomaly detection scheme via system profiling in Smart Grids. In Proceedings of the 2021 2nd International Conference on Intelligent Engineering and Management (ICIEM), London, UK, 28–30 April 2021; pp. 417–422. [Google Scholar]
- Dixit, P.; Bhattacharya, P.; Tanwar, S.; Gupta, R. Anomaly detection in autonomous electric vehicles using AI techniques: A comprehensive survey. Expert Syst. 2022, 39, e12754. [Google Scholar] [CrossRef]
- Raza, A.; Tran, K.P.; Koehl, L.; Li, S. AnoFed: Adaptive anomaly detection for digital health using transformer-based federated learning and support vector data description. Eng. Appl. Artif. Intell. 2023, 121, 106051. [Google Scholar] [CrossRef]
- Deng, A.; Hooi, B. Graph neural network-based anomaly detection in multivariate time series. Proc. Conf. AAAI Artif. Intell. 2021, 35, 4027–4035. [Google Scholar] [CrossRef]
- Buchhorn, K.; Santos-Fernandez, E.; Mengersen, K.; Salomone, R. Graph Neural Network-Based Anomaly Detection for River Network Systems. arXiv 2023, arXiv:2304.09367. [Google Scholar]
- Tang, C.; Xu, L.; Yang, B.; Tang, Y.; Zhao, D. GRU-Based Interpretable Multivariate Time Series Anomaly Detection in Industrial Control System. Comput. Secur. 2023, 127, 103094. [Google Scholar] [CrossRef]
- Guo, H.; Zhou, Z.; Zhao, D.; Hung, P.C. H-Gdn: Hierarchical Graph Deviation Network for Multivariate Time Series Anomaly Detection in Iot. SSRN 2022, ssrn:4283684. [Google Scholar]
- Vaswani, A.; Shazeer, N.; Parmar, N.; Uszkoreit, J.; Jones, L.; Gomez, A.N.; Polosukhin, I. Attention is all you need. In Advances in Neural Information Processing Systems; ACM: New York, NY, USA, 2017; p. 30. [Google Scholar]
- Veličković, P.; Cucurull, G.; Casanova, A.; Romero, A.; Lio, P.; Bengio, Y. Graph attention networks. arXiv 2017, arXiv:1710.10903. [Google Scholar]
- Liu, F.T.; Ting, K.M.; Zhou, Z.H. Isolation Forest. In Proceedings of the 2008 Eighth IEEE International Conference on Data Mining, Pisa, Italy, 15–19 December 2008; IEEE: Piscataway, NJ, USA, 2008; pp. 413–422. [Google Scholar]
- Breunig, M.M.; Kriegel, H.P.; Ng, R.T.; Sander, J. LOF: Identifying density-based local outliers. In Proceedings of the 2000 ACM SIGMOD International Conference on Management of Data, Dallas, TX, USA, 15–18 May 2000; pp. 93–104. [Google Scholar]
- Zong, B.; Song, Q.; Min, M.R.; Cheng, W.; Lumezanu, C.; Cho, D.; Chen, H. Deep auto encoding gaussian mixture model for unsupervised anomaly detection. In Proceedings of the International Conference on Learning Representations (ICLR), Vancouver, BC, Canada, 30 April–3 May 2018; pp. 1448–1460. [Google Scholar]
- Su, Y.; Zhao, Y.; Niu, C.; Liu, R.; Sun, W.; Pei, D. Robust anomaly detection for multivariate time series through stochastic recurrent neural network. In Proceedings of the 25th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, Anchorage, AK, USA, 4–8 August 2019; pp. 2828–2837. [Google Scholar]
- Cui, Z.; Ke, R.; Pu, Z.; Wang, Y. Stacked bidirectional and unidirectional LSTM recurrent neural network for forecasting network-wide traffic state with missing values. Transp. Res. Part C Emerg. Technol. 2020, 118, 102674. [Google Scholar] [CrossRef]
- Tay, Y.; Dehghani, M.; Bahri, D.; Metzler, D. Efficient transformers: A survey. ACM Comput. Surv. 2022, 55, 1–28. [Google Scholar] [CrossRef]
- Guo, S.; Lin, Y.; Wan, H.; Li, X.; Cong, G. Learning dynamics and heterogeneity of spatial-temporal graph data for traffic forecasting. IEEE Trans. Knowl. Data Eng. 2021, 34, 5415–5428. [Google Scholar] [CrossRef]
- Xu, M.; Dai, W.; Liu, C.; Gao, X.; Lin, W.; Qi, G.J.; Xiong, H. Spatial-temporal transformer networks for traffic flow forecasting. arXiv 2020, arXiv:2001.02908. [Google Scholar]
- Ba, J.L.; Kiros, J.R.; Hinton, G.E. Layer normalization. arXiv 2016, arXiv:1607.06450. [Google Scholar]
- Optics and SAR Satellite Payload Retrieval. Available online: https://data.cresda.cn/#/2dMap (accessed on 5 February 2023).
- Sridhar, A.; Suman, K.A. Beginning Anomaly Detection Using Python-Based Deep Learning, with Keras and PyTorch, 1st ed.; Tsinghua University Press: Beijing, China, 2020; pp. 3–6. [Google Scholar]
- Hundman, K.; Constantinou, V.; Laporte, C.; Colwell, I.; Soderstrom, T. Detecting spacecraft anomalies using lstms and nonparametric dynamic thresholding. In Proceedings of the 24th ACM SIGKDD International Conference on Knowledge Discovery & Data Mining, London, UK, 19–23 August 2018; pp. 387–395. [Google Scholar]
- Kingma, D.P.; Welling, M. Auto-encoding variational bayes. arXiv 2013, arXiv:1312.6114. [Google Scholar]
- Park, D.; Hoshi, Y.; Kemp, C.C. A multimodal anomaly detector for robot-assisted feeding using an lstm-based variational autoencoder. IEEE Robot. Autom. Lett. 2018, 3, 1544–1551. [Google Scholar] [CrossRef]
- Shi, X.; Chen, Z.; Wang, H.; Yeung, D.Y.; Wong, W.K.; Woo, W.C. Convolutional LSTM network: A machine learning approach for precipitation nowcasting. In Advances in Neural Information Processing Systems; ACM: New York, NY, USA, 2015; p. 28. [Google Scholar]
- Shen, L.; Li, Z.; Kwok, J. Timeseries anomaly detection using temporal hierarchical one-class network. Adv. Neural Inf. Process. Syst. 2020, 33, 13016–13026. [Google Scholar]
- Jain, K.; Saxena, A. Simulation on supplier side bidding strategy at day-ahead electricity market using ant lion optimizer. J. Comput. Cogn. Eng. 2023, 2, 17–27. [Google Scholar]
- Saikia, L.C.; Sinha, N.; Nanda, J. Maiden application of bacterial foraging based fuzzy IDD controller in AGC of a multi-area hydrothermal system. Int. J. Electr. Power Energy Syst. 2013, 45, 98–106. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Research | Year | Objective | Dataset | Accuracy | Limitations |
|---|---|---|---|---|---|
| Bronz et al. [10] | 2020 | The SVM algorithm of the characteristic trajectory | Flight Log | 95% | The computational limitations of the inference hardware should be carefully taken into account during training |
| Yaman et al. [11] | 2022 | A lightweight method has been proposed for the early detection of faults in UAV motors | Helicopter; | 100%; | Fault settings are not comprehensive |
| Duocopter; | 100% | ||||
| Tricopter; | 99.06%; | ||||
| Quadcopter | 90.53% | ||||
| Pan et al. [12] | 2021 | Established ANN-NARX parameter prediction model for aeroengine | Actual flight test data of an engine sortie | 95.2% | Fault simulation state recognition rate is relatively low |
| Lv et al. [13] | 2020 | DPCA algorithm based on unsupervised learning | Aeroengine gas path component fault data | 91% | Experimental analysis with simulated data |
| Pan et al. [14] | 2020 | An anomaly detection model based on active learning and improved S3VM classification | Telemetry data from UAV | Labeled samples 5: 90.8%; | Labeled sample classification is less |
| Labeled samples 10: 92.7% | |||||
| Ahmad et al. [15] | 2022 | Compared two deep learning tools to detect anomalies in the values of the UAV attributes | Data from four flights of a fixed-wing aircraft called Thor | Average: 90% | Less precision when detecting anomalies in consecutive faults |
| You et al. [16] | 2022 | An FTCN-based Anomaly Detection Framework | The flight data of the UAV in a calm environment and in a crosswind environment of 3 m/s | 94.76% | Fine-tuning the model on a small training dataset in the source domain leads to biased predictions |
| Li et al. [17] | 2021 | Prediction and Anomaly Detection Using LSTM Neural Networks | GPS and IMU sensor data, ground street view image data | Average: 90.68% | The detection rate of random position offset attack and replay attack is not high enough |
| Components | Attribute Code | Attribute Description |
|---|---|---|
| Azimuth axis | TB8 | Temperature |
| IB1 | Current | |
| Elevation axis | TB3 | Temperature |
| IB2 | Current | |
| Cable | TB9 | Cable temperature |
| Signal antenna | TB2 | Temperature |
| VB11 | Power status | |
| ZL5 | Heater | |
| ZB1_EMG | Emergency stop status #1 | |
| ZB2_EMG | Emergency stop status #2 |
| ID | Anomaly Type | Amount |
|---|---|---|
| 1 | Point anomalies | 60 |
| 2 | Collective anomalies | 80 |
| 3 | Association anomalies | 242 |
| Attribute Code | Attribute Description | Gridding (Resolution) |
|---|---|---|
| L1A_Radiometer | Parsed radiometer remote sensing | - |
| L1A_Raddar | Parsed SMAP radar remote sensing | - |
| L1B_TB | Geolocated, calibrated brightness temperature in time order | 36 km |
| L1B_TB_E | Backus-Gilbert interpolated, calibrated brightness temperature in time order | 9 km |
| L1B_S0_LoRes | Low-resolution radar sigma0 in time order | 5 × 30 km |
| L1C_S0_HiRes | High-resolution radar sigma0 on swath grid | 1 km |
| L1C_TB | Parsed radiometer remote sensing | 36 km |
| L1C_TB_E | Backus-Gilbert interpolated, calibrated brightness temperature on EASE2 grid | 9 km |
| L1B_TB_NRT | Near realtime geolocated, calibrated brightness temperature in time order | 36 km |
| L2_SM_A | Radar soil moisture | 3 km |
| L2_SM_P | Radiometer soil moisture | 36 km |
| L2_SM_P_E | Radiometer soil moisture | 9 km |
| L2_SM_AP | SMAP active-passive soil moisture | 9 km |
| L2_SM_P_NRT | Near real-time radiometer soil moisture | 36 km |
| L2_SM_SP | SMAP radiometer/copernicus sentinel-1 soil moisture | 3 km |
| L3_FT_A | Daily global composite radar freeze/thaw state | 3 km |
| L3_FT_P | Daily composite freeze/thaw state | 36 km |
| L3_FT_P_E | Daily composite freeze/thaw state | 9 km |
| L3_SM_A | Daily global composite radar soil moisture | 3 km |
| L3_SM_P | Daily global composite radiometer soil moisture | 36 km |
| L3_SM_AP | Daily global composite active passive soil moisture | 9 km |
| L4_SM | Surface and root zone soil moisture | 9 km |
| L4_C | Carbon Net Ecosystem Exchange | 9 km |
| ID | Anomaly Type | Amount |
|---|---|---|
| 1 | Point anomalies | 43 |
| 2 | Contextual anomalies | 26 |
| Parameter | Value | Meaning |
|---|---|---|
| 256 | Implicit vector of inflow data channel | |
| 82 | Vector after one-hot encoding of time tag | |
| h | 4 | Attention head of multi-head attention module |
| 128 | Implicit vector of outgoing data channel | |
| 128 | Implicit vector of fusion data channel | |
| 128 | Implicit vector of LSTM cell | |
| Batch size | 256 | Batch size |
| Epoch | 3000 | Maximum round of complete training |
| Stop condition | 200 | 200 consecutive rounds of error |
| Learning rate | 0.05 | Learning rate |
| Item | Detail |
|---|---|
| CPU | AMD Ryzen5 5600X 6-Core Processor@3.7 GHz |
| RAM | 16 GB DDR4@3200 MHz |
| Operating system GPU | Ubuntu 18.04.3 LTS NVIDIA GeForce RTX 2060 SUPER |
| CUDA | CUDA 10.2 |
| Python PyTorch | Python 3.8 PyTorch 1.8.1 |
| Point Anomalies | Collective Anomalies | Association Anomalies | |||||||
|---|---|---|---|---|---|---|---|---|---|
| P | R | F1 | P | R | F1 | P | R | F1 | |
| iForest | 59.34 | 53.74 | 56.40 | 56.84 | 64.38 | 60.37 | 75.98 | 77.94 | 76.94 |
| LOF | 58.45 | 90.58 | 71.05 | 59.51 | 87.80 | 70.94 | 58.35 | 90.42 | 70.93 |
| DAGMM | 75.79 | 77.10 | 76.44 | 79.22 | 70.75 | 78.42 | 77.82 | 70.75 | 74.11 |
| OmniAnomaly | 88.67 | 91.17 | 89.89 | 83.34 | 94.49 | 88.57 | 77.97 | 95.86 | 85.99 |
| LSTM-VAE | 79.36 | 74.29 | 72.79 | 75.92 | 83.30 | 76.25 | 82.52 | 82.56 | 80.12 |
| THOC | 89.65 | 88.46 | 89.05 | 85.51 | 63.66 | 72.98 | 83.34 | 94.49 | 88.57 |
| GDN | 91.32 | 93.99 | 92.06 | 89.63 | 97.54 | 91.71 | 87.31 | 85.99 | 85.30 |
| GTAF | 92.28 | 96.66 | 94.12 | 92.52 | 99.03 | 94.17 | 93.70 | 93.90 | 93.80 |
| Point Anomalies | Context Anomalies | |||||
|---|---|---|---|---|---|---|
| P | R | F1 | P | R | F1 | |
| iForest | 53.94 | 86.54 | 66.45 | 69.42 | 59.07 | 63.83 |
| LOF | 47.72 | 85.25 | 61.18 | 58.92 | 56.33 | 57.60 |
| DAGMM | 77.82 | 70.75 | 74.11 | 86.45 | 56.73 | 68.51 |
| OmniAnomaly | 89.02 | 86.37 | 87.67 | 83.34 | 81.99 | 82.66 |
| LSTM-VAE | 85.49 | 79.94 | 82.62 | 88.67 | 67.75 | 78.81 |
| THOC | 88.45 | 90.97 | 89.69 | 92.06 | 89.34 | 90.68 |
| GDN | 94.37 | 95.13 | 94.75 | 94.37 | 93.03 | 93.70 |
| GTAF | 96.92 | 93.13 | 94.99 | 96.36 | 94.10 | 95.27 |
| Point Anomalies | Collective Anomalies | Association Anomalies | |||||||
|---|---|---|---|---|---|---|---|---|---|
| P | R | F1 | P | R | F1 | P | R | F1 | |
| GTAF | 92.28 | 96.66 | 94.12 | 92.52 | 99.03 | 94.17 | 93.70 | 93.90 | 93.80 |
| GTA | 87.31 | 85.99 | 85.30 | 82.52 | 82.56 | 80.12 | 87.11 | 82.18 | 87.53 |
| GTF | 88.08 | 96.10 | 91.16 | 84.03 | 91.18 | 86.51 | 82.35 | 85.47 | 82.99 |
| GT | 79.36 | 74.29 | 72.79 | 80.81 | 82.22 | 81.51 | 80.15 | 84.46 | 82.25 |
| TAF | 77.44 | 80.12 | 78.79 | 75.22 | 79.60 | 77.35 | 73.40 | 80.51 | 76.45 |
| Point Anomalies | Contextual Anomalies | |||||
|---|---|---|---|---|---|---|
| P | R | F1 | P | R | F1 | |
| GTAF | 96.92 | 93.13 | 94.99 | 96.36 | 94.10 | 95.27 |
| GTA | 94.77 | 92.64 | 93.69 | 92.25 | 90.99 | 91.66 |
| GTF | 95.82 | 92.33 | 94.04 | 93.11 | 93.28 | 93.19 |
| GT | 94.42 | 92.15 | 93.27 | 90.17 | 90.22 | 90.19 |
| TAF | 91.32 | 89.99 | 90.65 | 88.08 | 93.10 | 90.52 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, G.; Ai, J.; Mo, L.; Yi, X.; Wu, P.; Wu, X.; Kong, L. Anomaly Detection for Data from Unmanned Systems via Improved Graph Neural Networks with Attention Mechanism. Drones 2023, 7, 326. https://doi.org/10.3390/drones7050326
Wang G, Ai J, Mo L, Yi X, Wu P, Wu X, Kong L. Anomaly Detection for Data from Unmanned Systems via Improved Graph Neural Networks with Attention Mechanism. Drones. 2023; 7(5):326. https://doi.org/10.3390/drones7050326
Chicago/Turabian StyleWang, Guoying, Jiafeng Ai, Lufeng Mo, Xiaomei Yi, Peng Wu, Xiaoping Wu, and Linjun Kong. 2023. "Anomaly Detection for Data from Unmanned Systems via Improved Graph Neural Networks with Attention Mechanism" Drones 7, no. 5: 326. https://doi.org/10.3390/drones7050326