
Design Procedure of a Low-Cost System for Energy Replenishment in a Quadrotor UAV through a Battery Exchange Mechanism
 , , , and
, , , and
Abstract
:1. Introduction
2. Design Considerations
- A design that facilitates coupling of the UAV with the LS (oscillations of rad in angle) and reduces the presence of aerodynamic effects during landing (e.g., compressed air between the quadrotor and the ground [4]);
- A mechanism that performs the battery exchange in less than 10 s, thus avoiding re-configuration of the electronic speed controllers (ESCs);
- Low quantity of actuators and sensors, in order to reduce energy consumption;
- The use of low-cost, low-energy sensors to know when the quadrotor has landed on the structure and battery exchange is required;
- A mechanism to release/clamp the battery quickly and safely, with low energy consumption and which is easy to condition to other quadrotors.
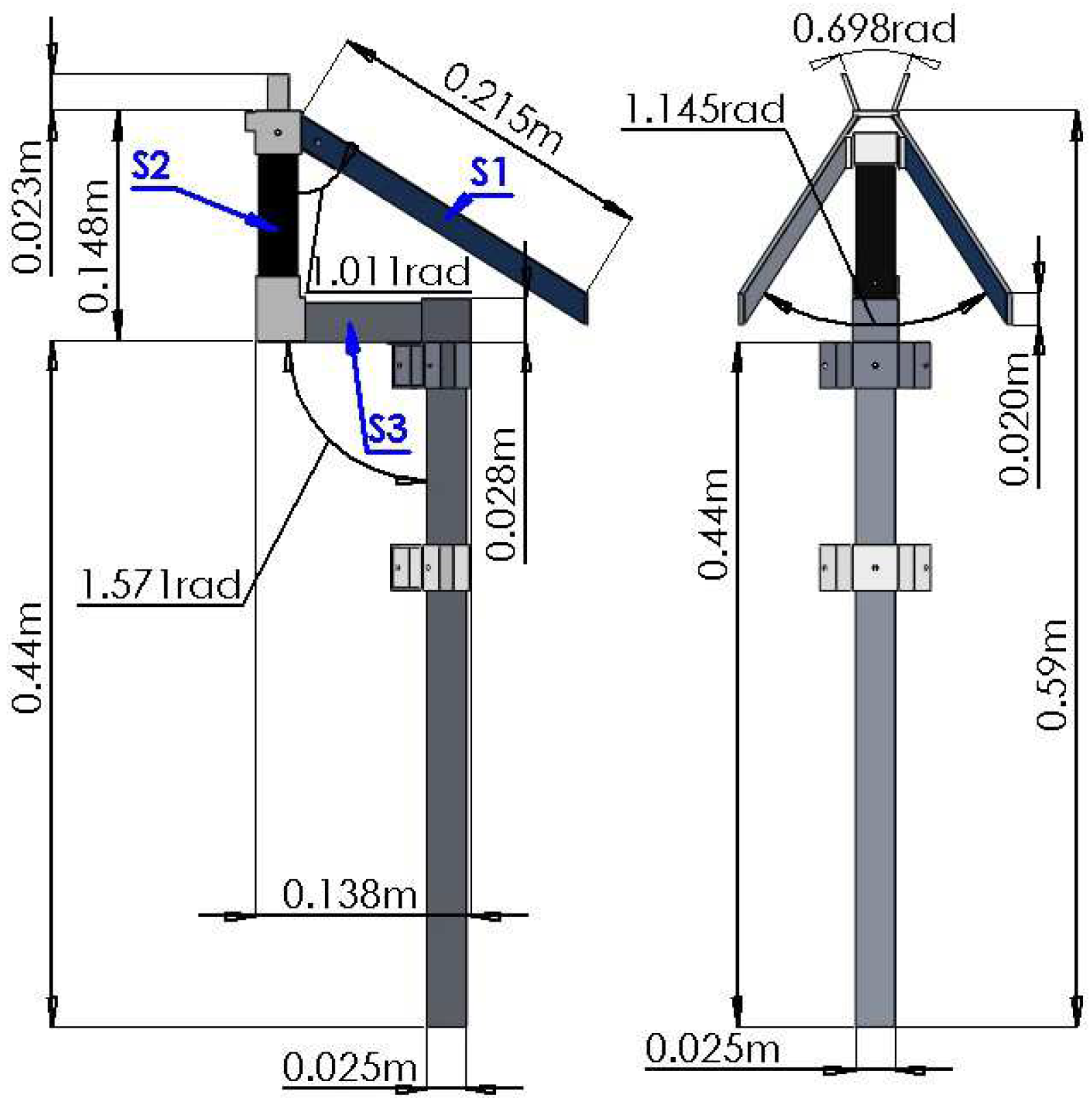
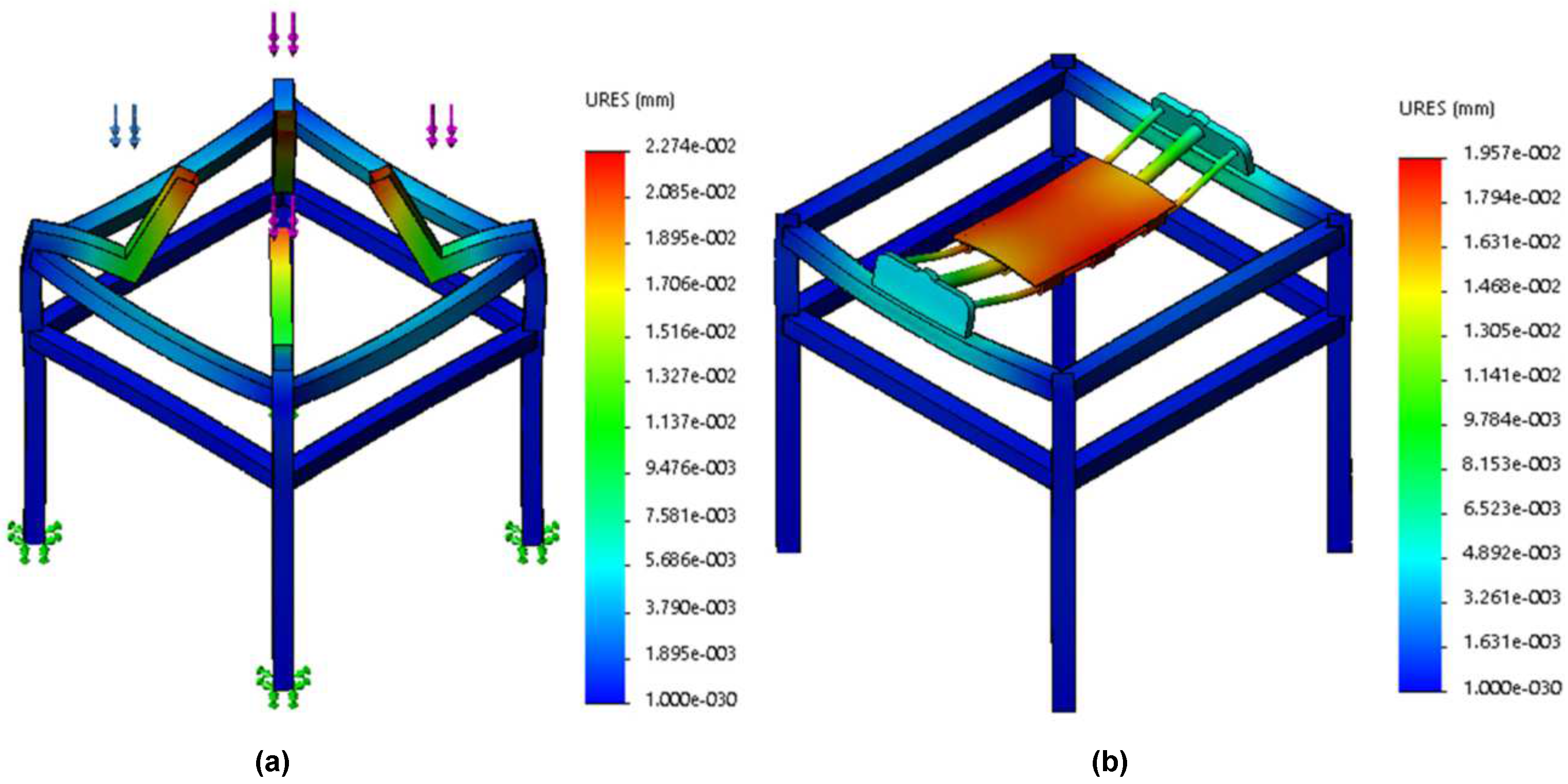
2.1. Landing Structure
- No active components: The mechanism does not consume energy.
- Battery aligned with the BEM: The discharged battery is always above the home position.
- Precision Landing: Decreases the required accuracy in yaw angle control () during landing.
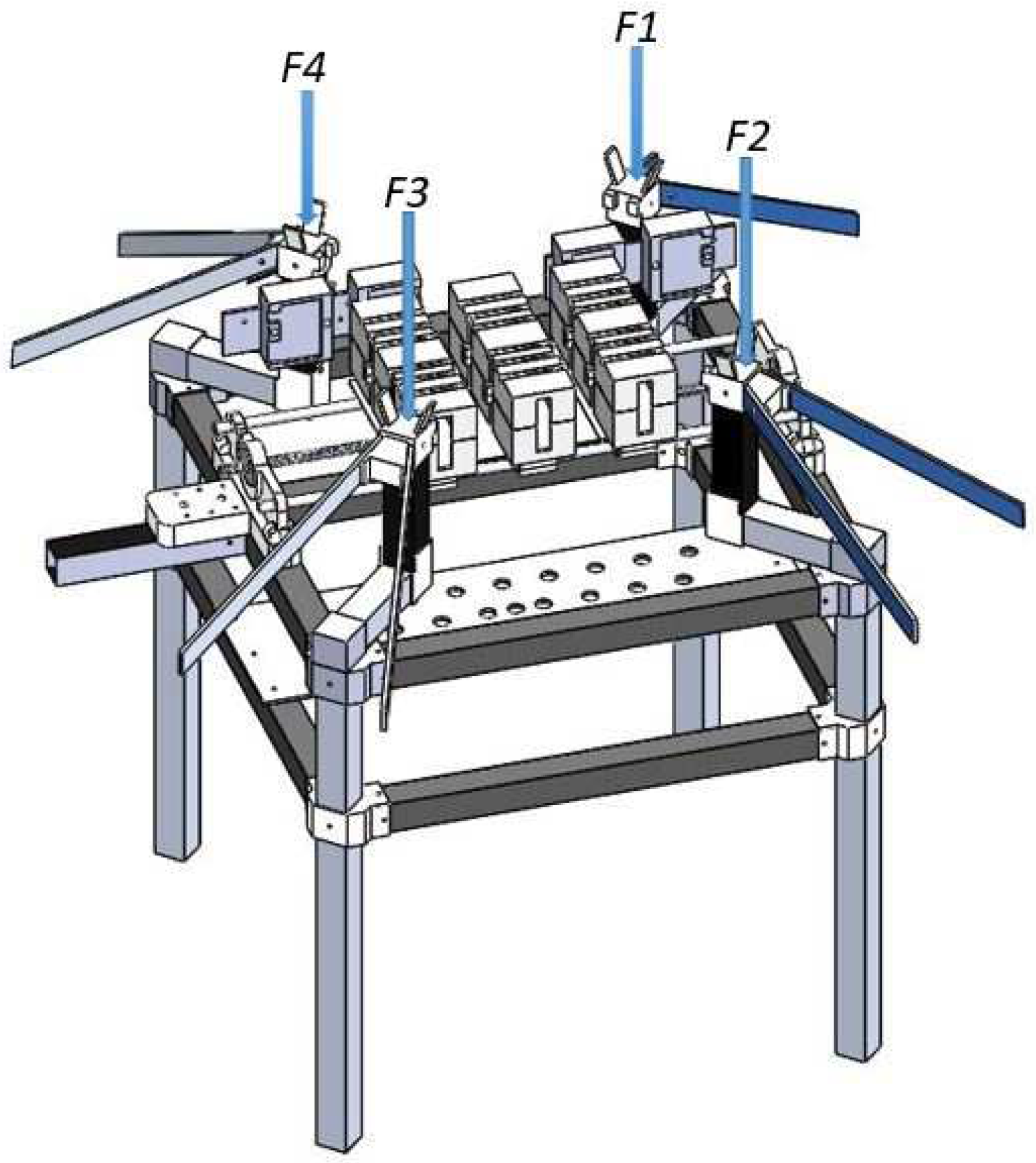
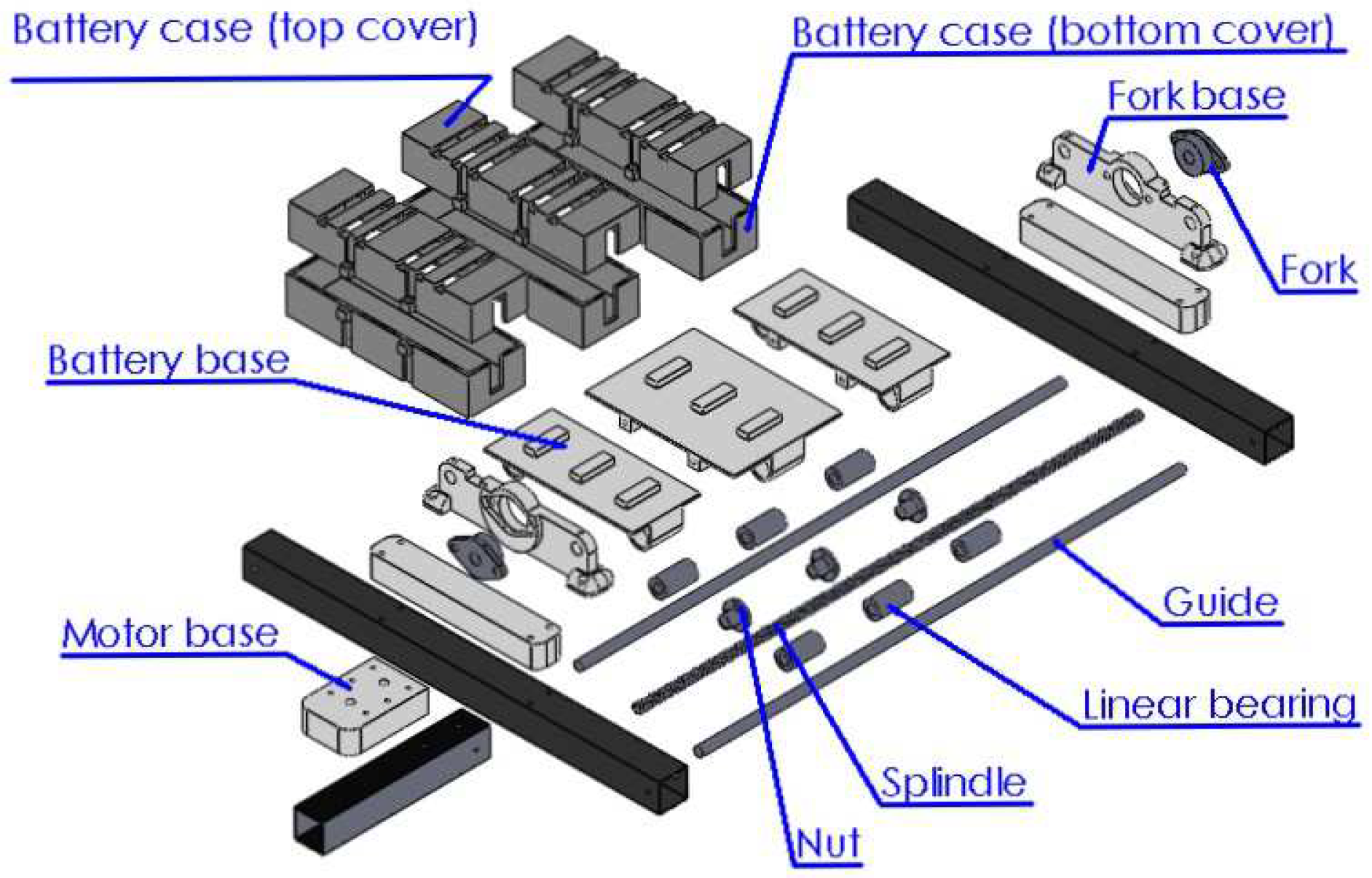
2.2. Battery Exchange Mechanism
2.2.1. BEM Features
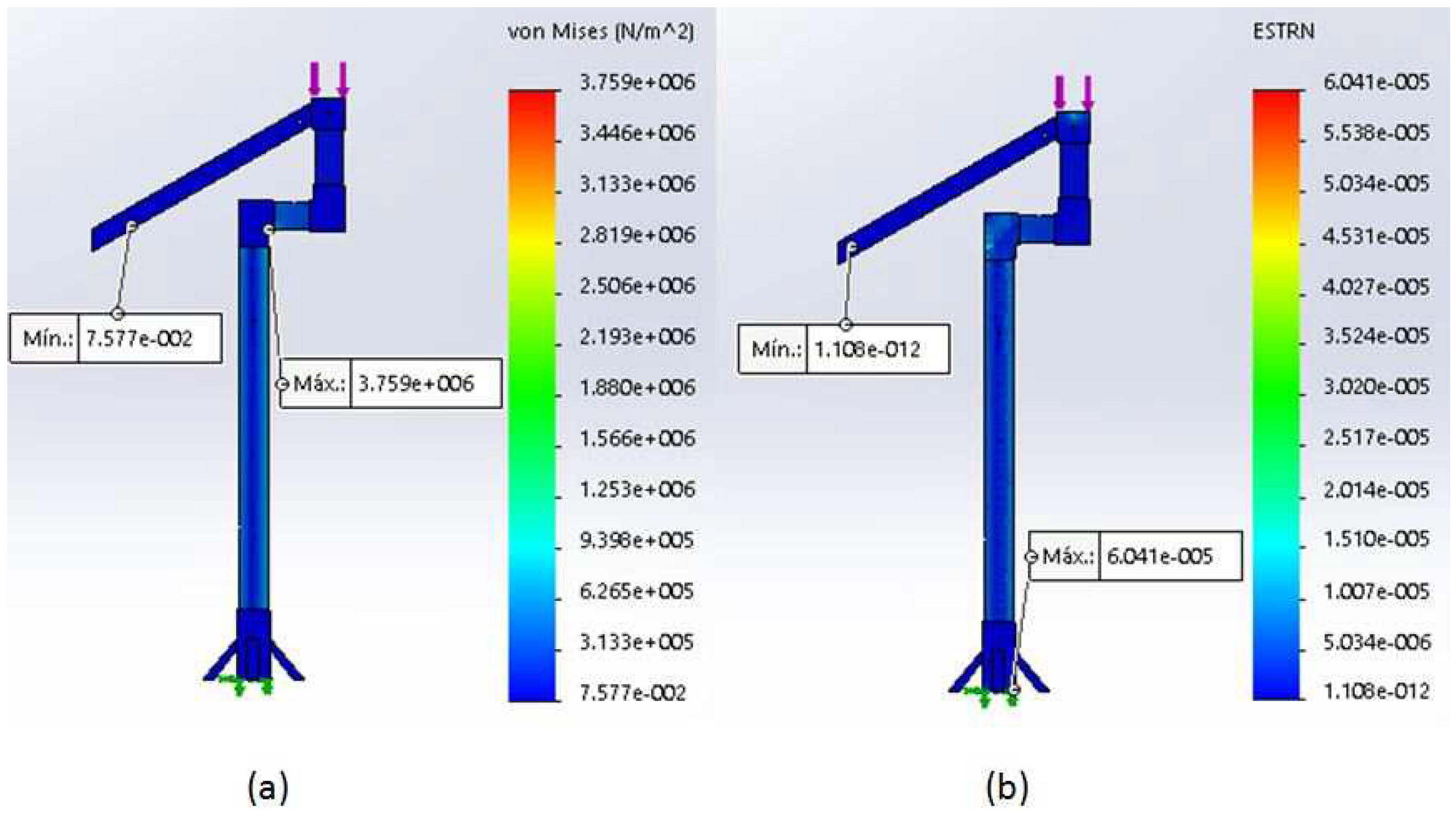
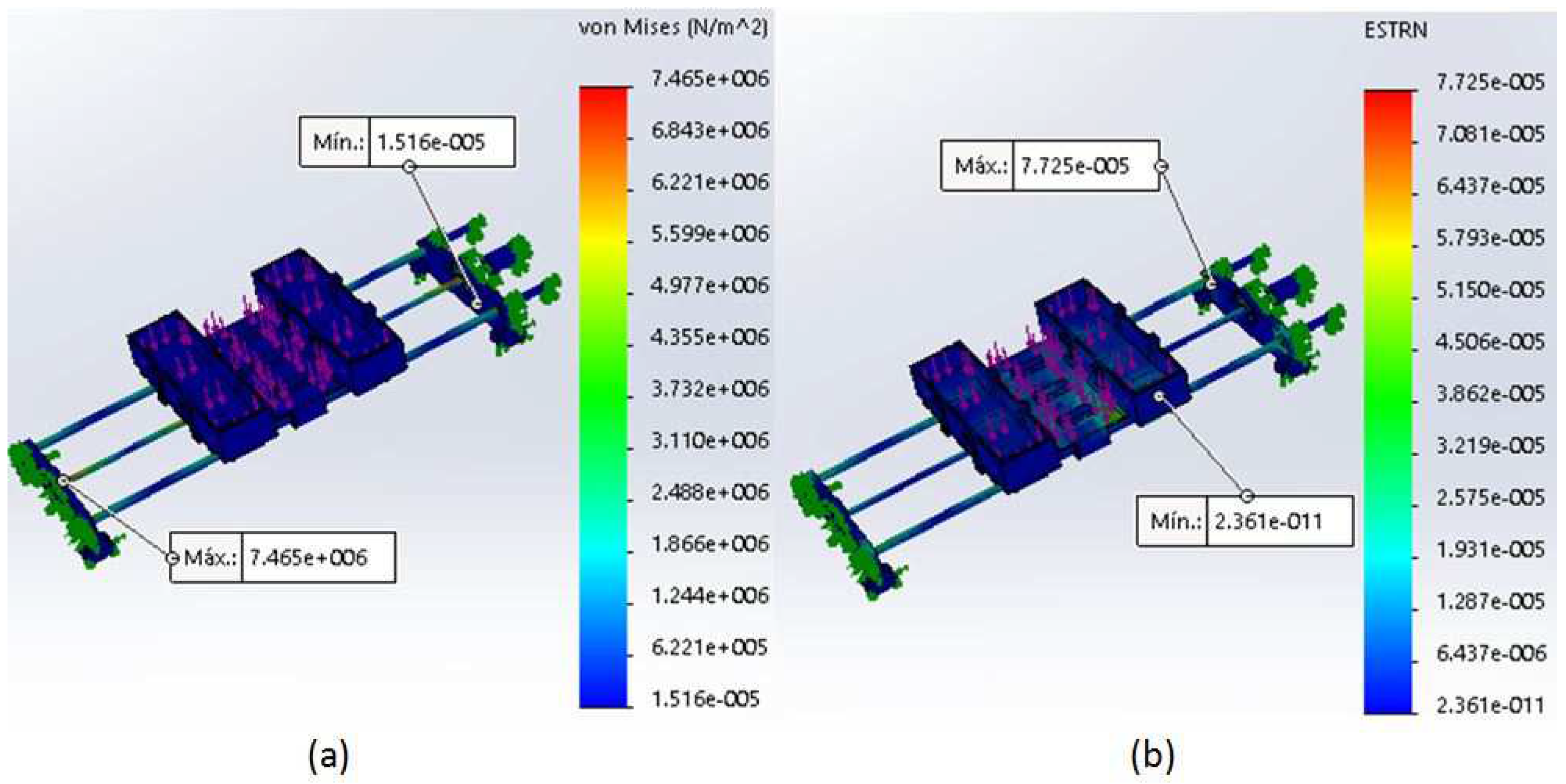
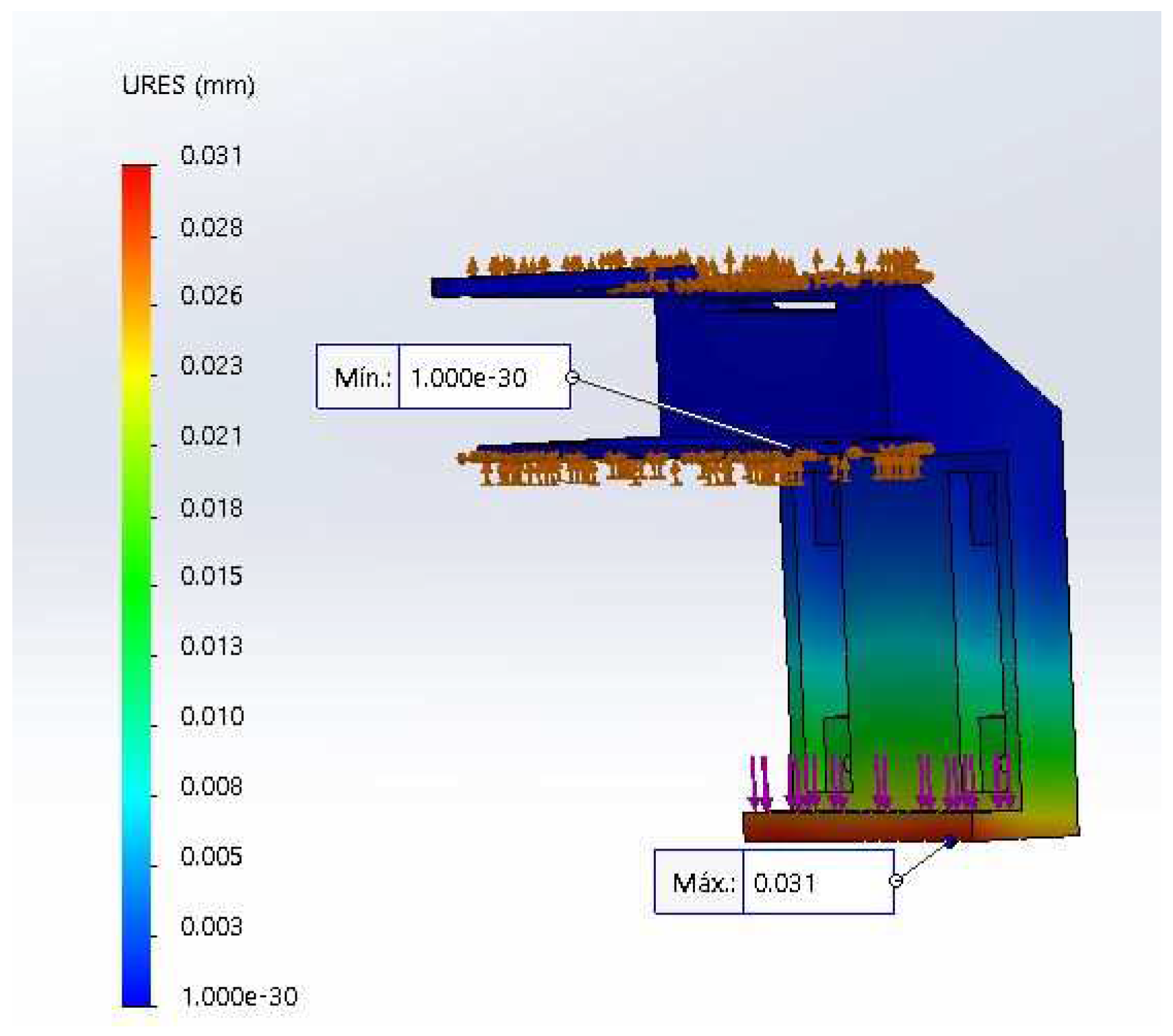
2.2.2. FEA in the BEM
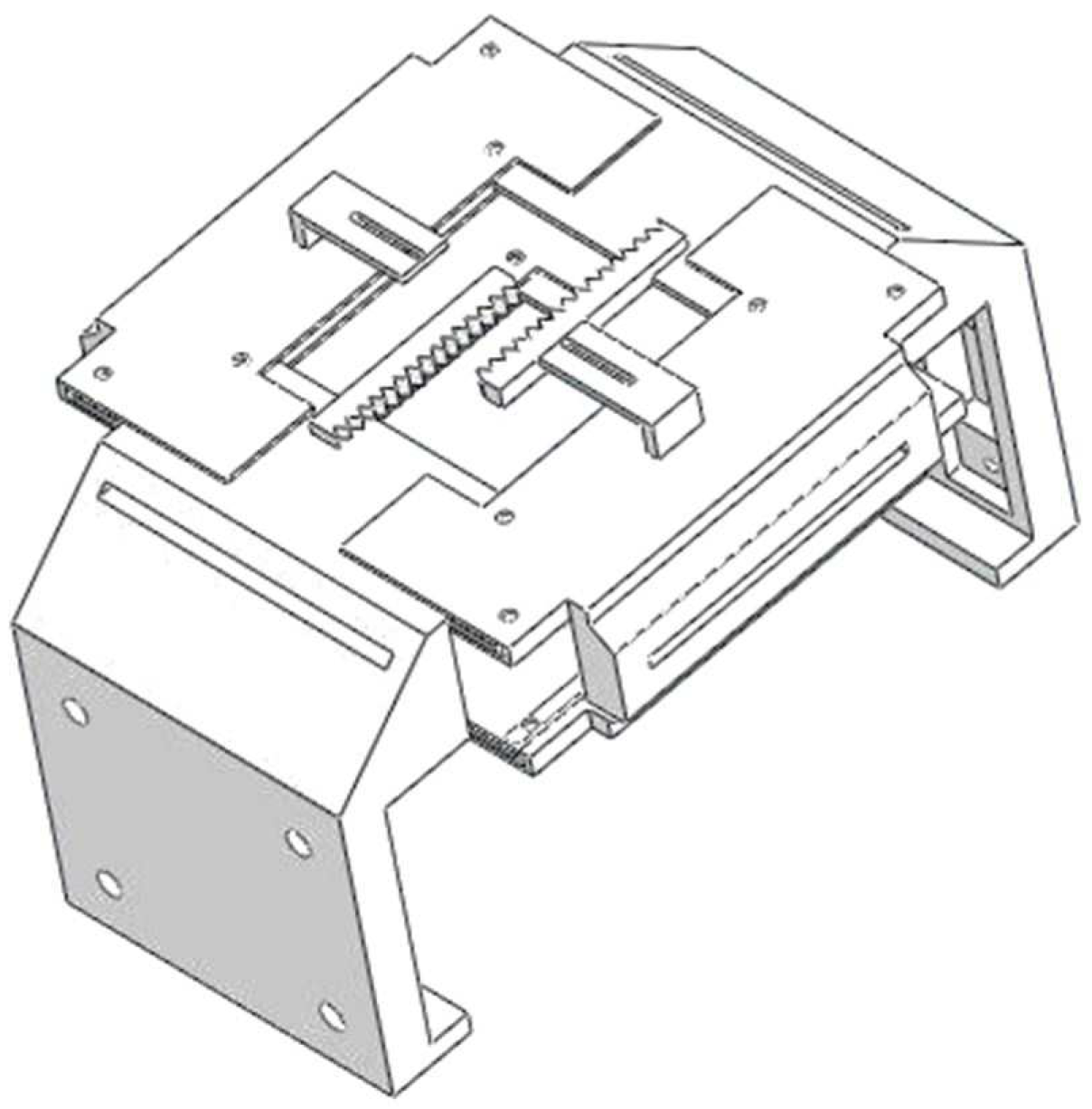
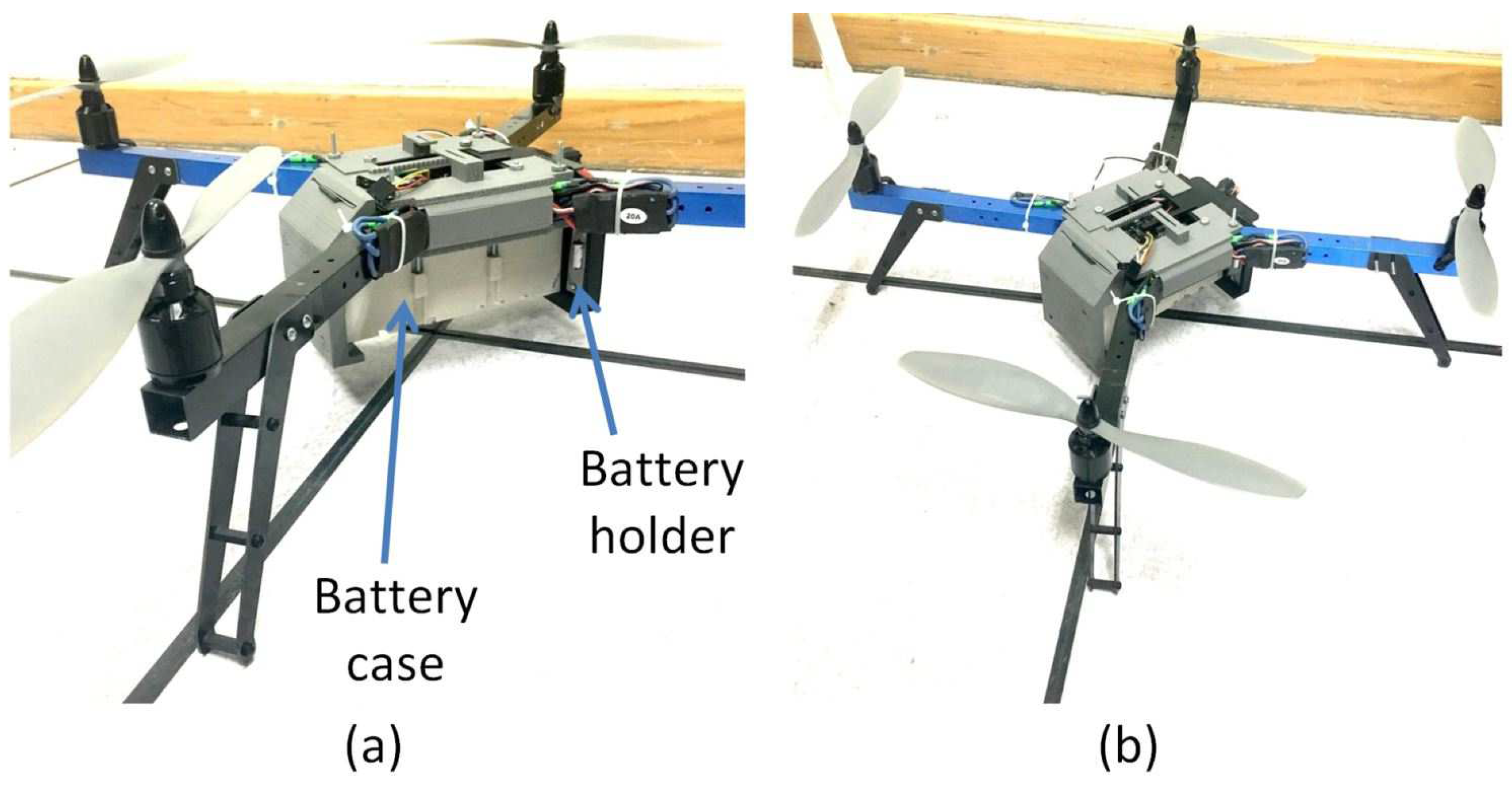
2.3. Battery Release/Clamp Mechanism
Battery Case
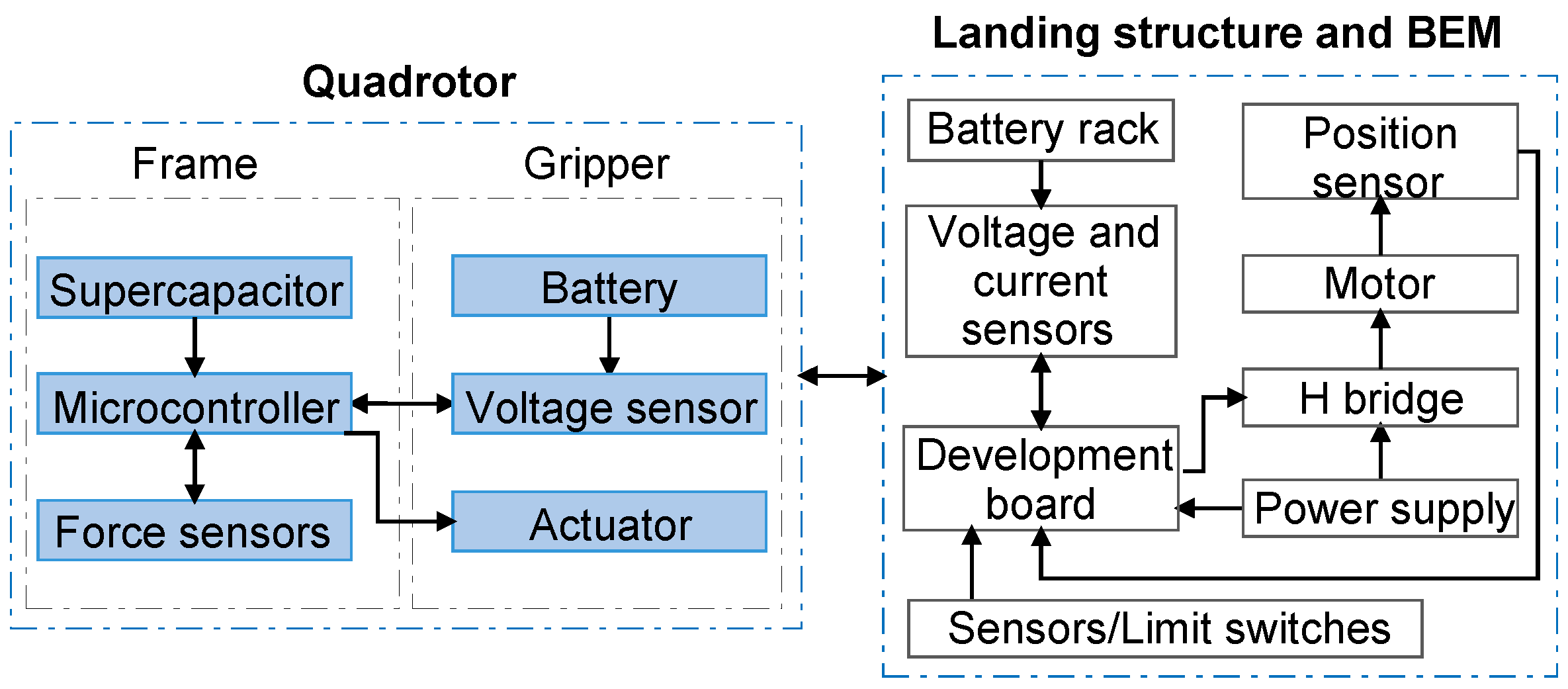
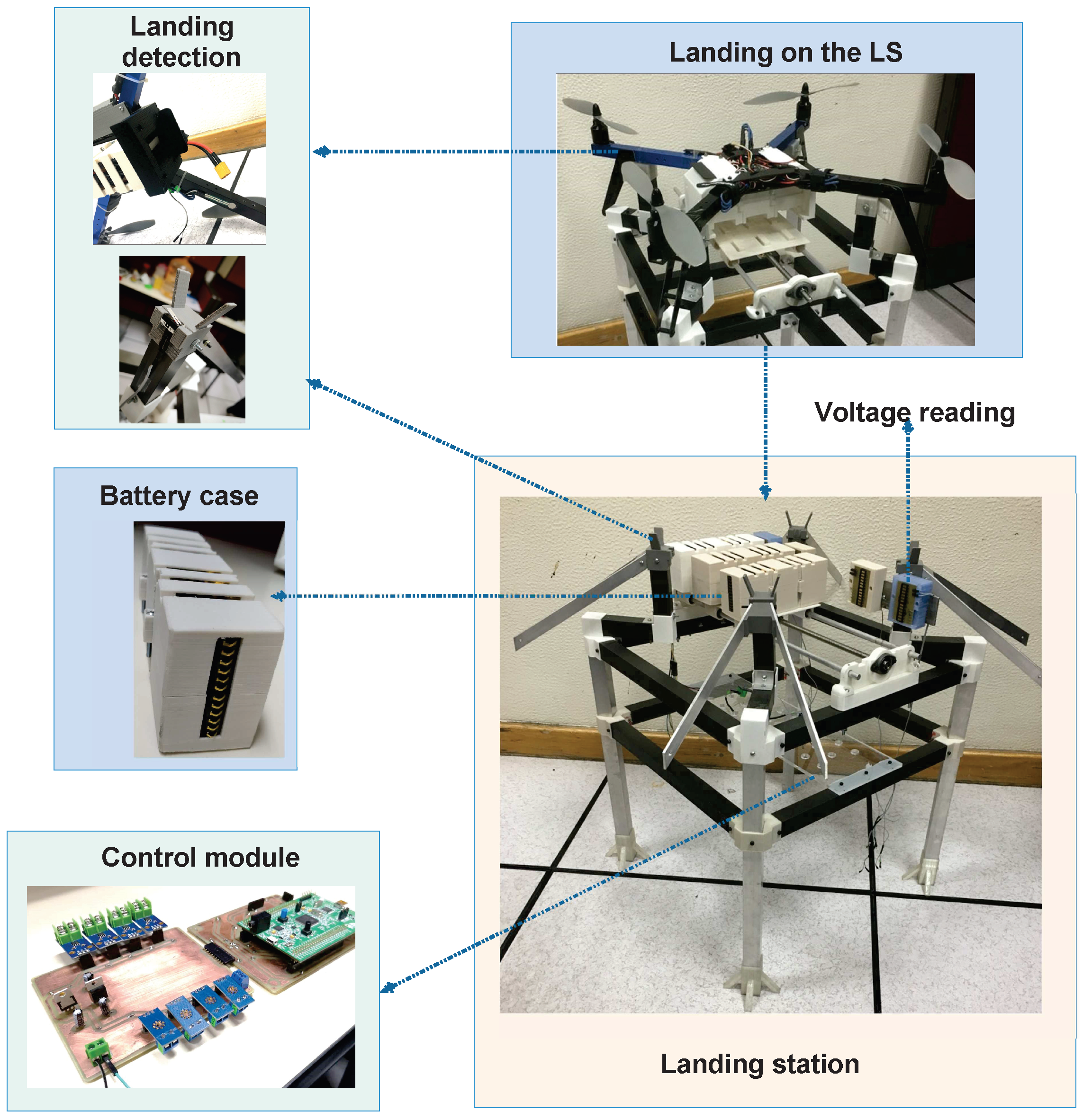
3. Instrumentation and Construction
3.1. Landing Structure and BEM
3.1.1. Module 1
- Voltage sensors. Four voltage sensors are required to determine which of the batteries has the highest charge and its location. The maximum voltage that the batteries can have is 14.8 V. Thus, the ADCs/5 sensor was chosen, which measures up to 16.5 V with a 3.3 V supply. The selected sensor and development board provide 248.242 (4 ) resolution. The resolution obtained for the sensor is small; hence, the obtained measurements are noise sensitive (for this application, ±0.1 V).The cell of a LiPo battery delivers approximately 3.9 V at the start of its operation (freshly charged). Subsequently, it begins to decrease until it reaches a constant operating zone (3.7 V), in which it remains for a time . After , the voltage drops with a faster time rate (), reaching the point where it delivers 3.3 V, this being the point to avoid in order to maintain cell integrity [5].Considering the previous paragraph, and in order to obtain the best possible resolution, the following equation is used to condition the sensor:where x is the signal of the ADC (B), is the maximum measurement voltage (15.6 V), is the resolution of the processor (4095 B), corresponds to the ADC obtained with 13.2 V (3.2 KB), y is the conditioned signal (V), and v is the measurement error compensation (V).
- Current sensors. Four current sensors are used to monitor the current during the battery charging process. The rationale for using four sensors is that LiPo batteries with more than 3.7 V are the result of connecting two or more cells in series. Therefore, the current in each of the cells is the same.The sensors used were the ACS712ELC-20 model, which allow for measuring up to 20 A and have a sensitivity of 100 mV/A. The noise present in these sensors can cause problems during the implementation of a charging control algorithm. Thus, the following moving average filter was used [36]:where is the output and is the input applied to the filter. If the value of N is large enough, the output will have a better response. Its performance is affected by a time delay in reading, which is equal to units of time.For this work, a 25-sample time window is used, which updates each sampling period (0.005 s), placing the new reading at the first position of a 25-value vector and discarding the value located at the last position, thus obtaining a signal with oscillations of ±0.003 A and a delay of 0.125 s. The above represents a good result, considering that the original signal has oscillations of ±0.3 A.After the filtering action, the signal is conditioned by the following equation:where is the input signal (B), corresponds to the value of the ADC when 0 A is measured (3.256 KB), s indicates the sensitivity of the sensor , a is the measurement compensation (A), and is the conditioned signal (A).and s were obtained experimentally using a variable load of 0 to 3 A, with increments of 100 mA at each reading. The data were entered as a vector to the polyfit function in MATLAB, obtaining a first-degree polynomial describing the behavior of the ADC with respect to the current reading (). The polynomial obtained is as follows:
3.1.2. Module 2
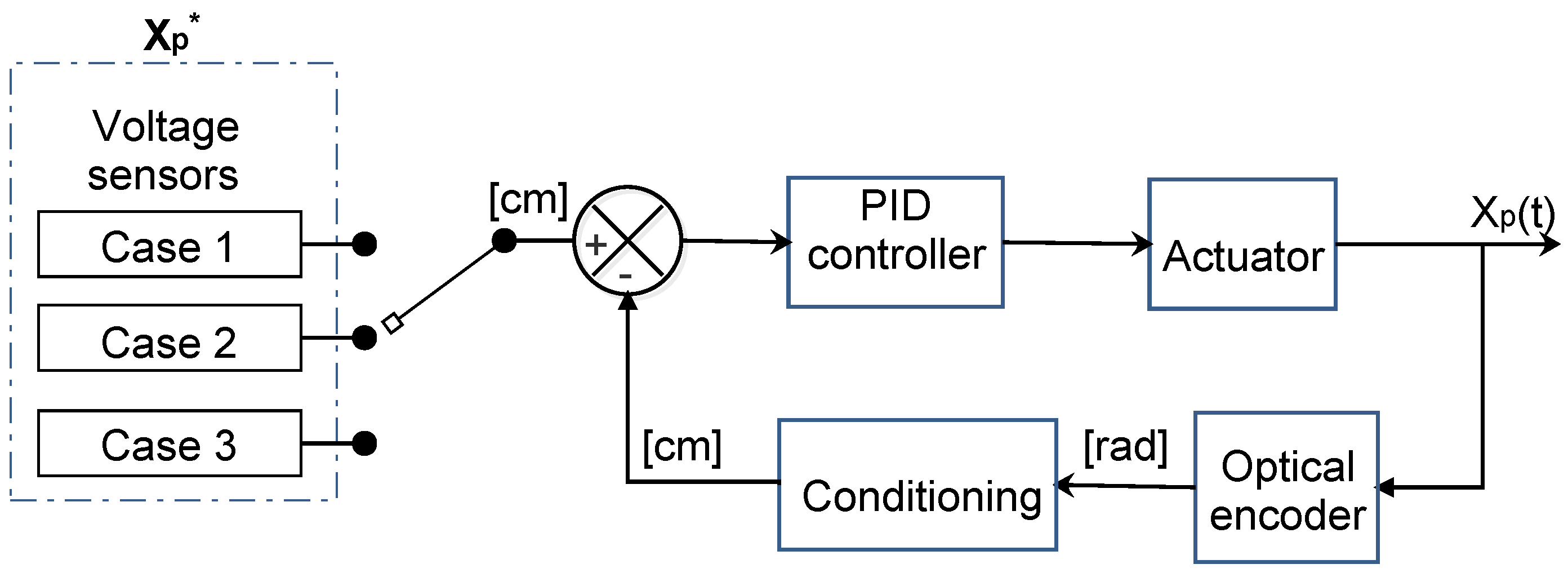
- Development board. For signal processing, calculation, and sending of the control signal to the system using the pulse-width modulation (PWM) technique, the STM32F407G-DISC development board was used, programmed using the MATLAB-Simulink software [37]. The card has a 32-bit ARM processor, 12-bit resolution for the ADC, and 16-bit resolution for the PWM. Finally, the sampling period was 0.005 s.
- The force required to move the batteries is:The previous calculation was made considering three batteries. Thus, considering the presence of friction between the batteries and the rails, a design force of 20 N was proposed. The power required P for the motor is [38]and the required torque T is obtained bywhere represents the angular velocity of the motor, which, according to the characteristics of the screw and nuts selected, is 1.234 rps. Therefore,With the obtained data, a Pololu model 37D 131:1 DC motor was selected, which generates a torque of 0.883 Nm when supplied at 6 V and 2.5 A. Considering the average battery charging time in a drone, the motor must run for 10 s every 15 min, which does not significantly affect the power consumption of the station.
- Position sensor. An incremental optical encoder (encoder) with a resolution of 64 pulses per revolution was selected for the motor shaft. However, the motor has a gearbox with a ratio of 131:1. Therefore, the combination of the encoder and the motor resulted in 8284 pulses for each revolution at the motor output.
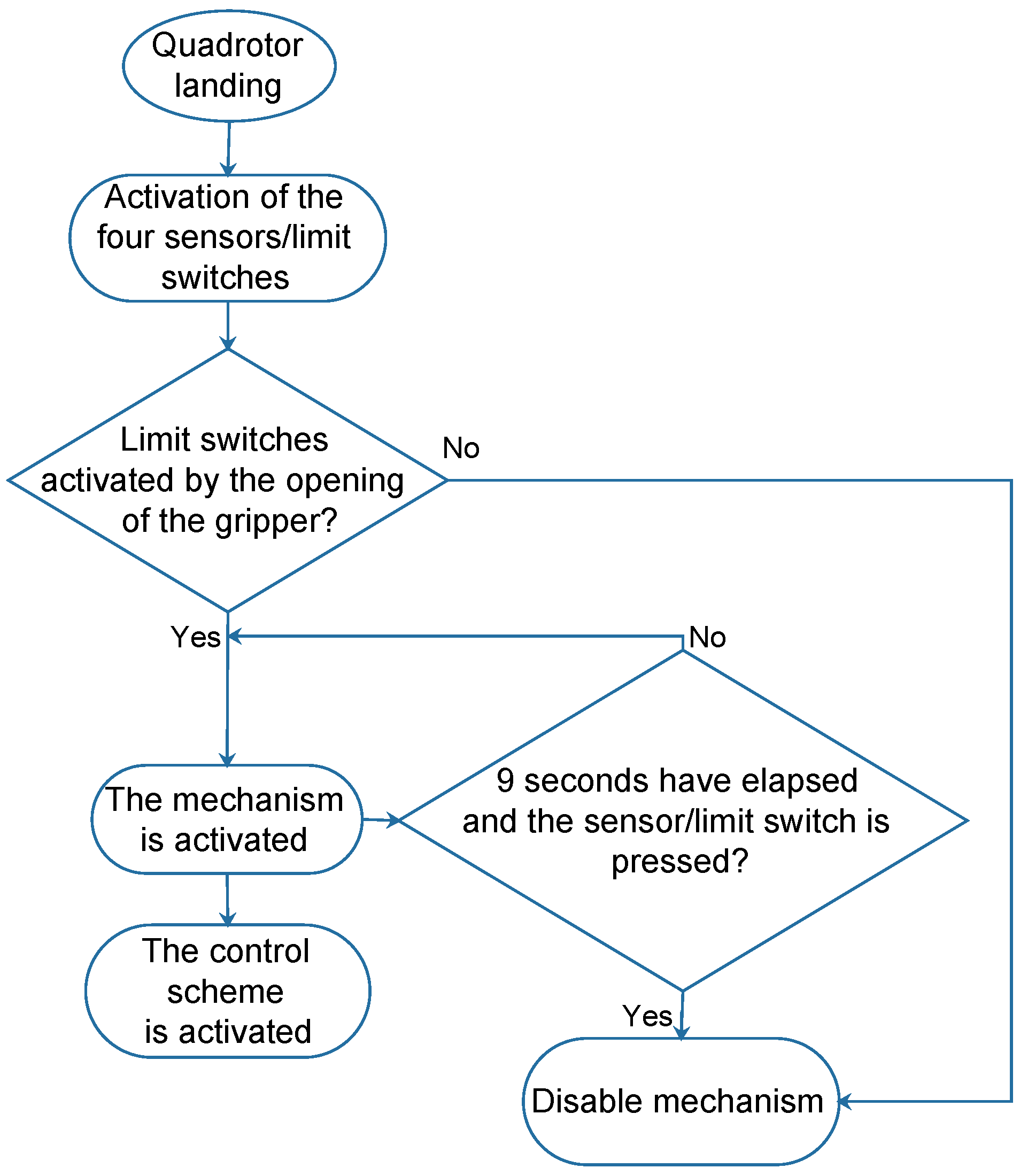
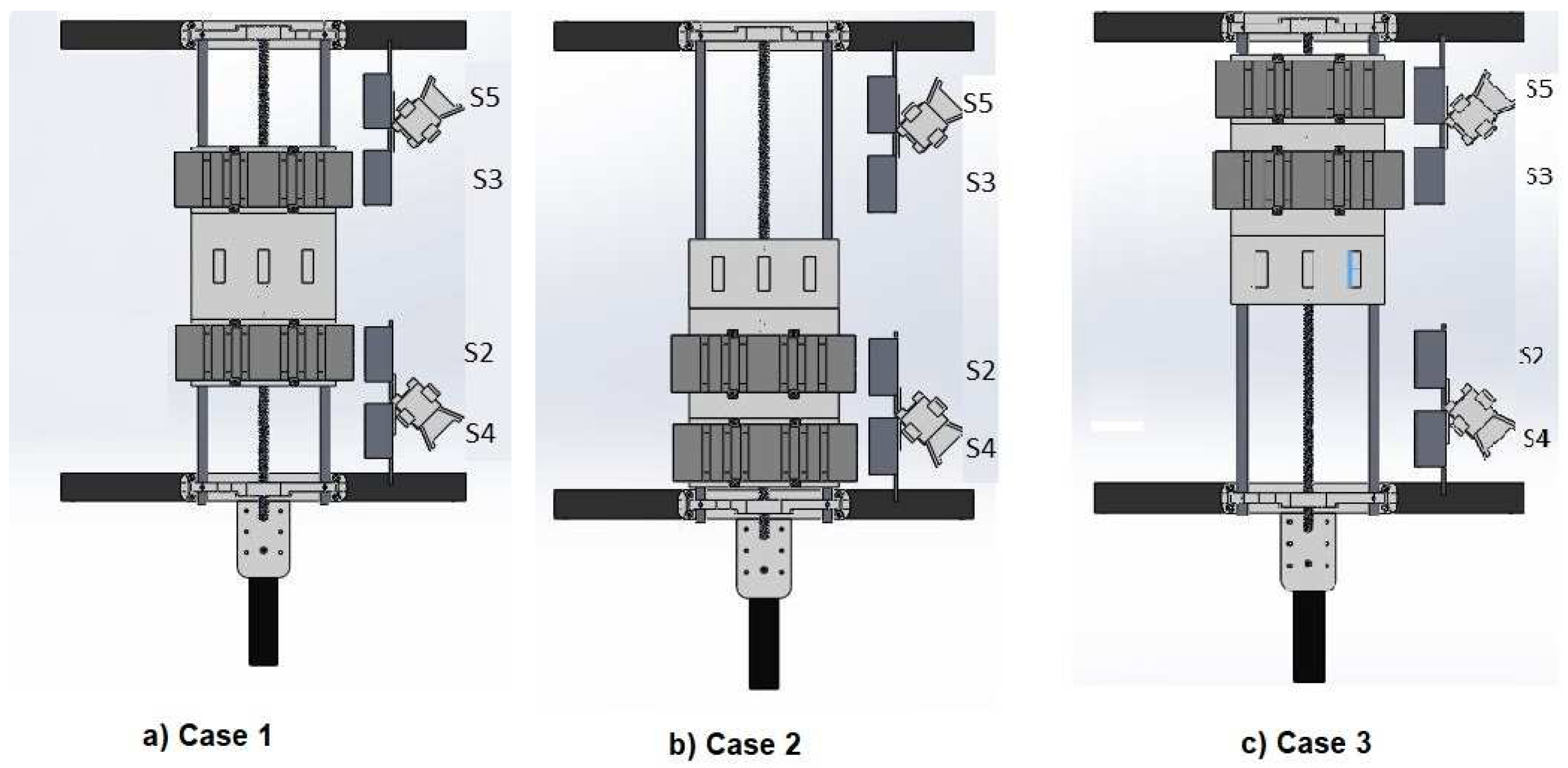
- Sensors/limit switches. These have two objectives: Activation and calibration of the mechanism. The first requires five sensors: four placed in the support points of the structure and one placed in such a way that it is pressed when releasing the battery. When the five sensors are pressed, the mechanism begins the exchange process.With respect to the second target, the sixth sensor is placed at the opposite end of the motor, which is used to calibrate the mechanism when the power supply is restarted.
- H bridge. The selected H bridge is a VNH2SP30 model, which provides a supply voltage to the motor between 5.5 and 16 V and supports a maximum current of 30 A.
3.2. Battery Release/Clamp Mechanism
- Microcontroller. A peripheral interface controller (PIC) PIC16F887 was selected to open and close the gripper, which is powered at 5 V and has a 10-bit resolution for analog–digital conversion. The PIC performs the acquisition of signals from the voltage and force sensors.
- Supercapacitor. Considering that the quadrotor runs out of power during the battery exchange, an element is required to supply power to the electronic speed controllers (ESCs), PIC, and the inertial navigation system (SNI). Based on the above, an supercapacitor model SCMR14C474MRBA0 of 0.47 F was selected, which is capable of supplying 5 V for 14 s, avoiding the loss of configuration of the entire logical part of the UAV.
- Actuator. The opening and closing of the gripper is conducted using a servomotor coupled to the sprocket of the mechanism; in this case, a SG-90 model was used, which has a torque of 1.8 Kgf·cm and is controlled by a signal. With a PWM of 0, the gripper remains closed; if the PWM has a period of 2 ms, the mechanism remains open.
- Voltage sensor. An sensor (see Section 3.1) is used to monitor the battery voltage in the quadrotor, in order to indicate when it should be changed.
- Force sensors. These are placed at the contact points of the quadrotor legs with the landing frame. Four sensors are used and, by means of a voltage divider, a signal between 0 and 5 V is obtained. The sensors used are MF01-N-221-A01 models, with an operating range of 0–1000 g. Considering that the weight of the quadrotor is 2.5 kg, each sensor must support 625 g. Therefore, when the vehicle is on the LS, the sensors deliver a voltage greater than 2.5 V.
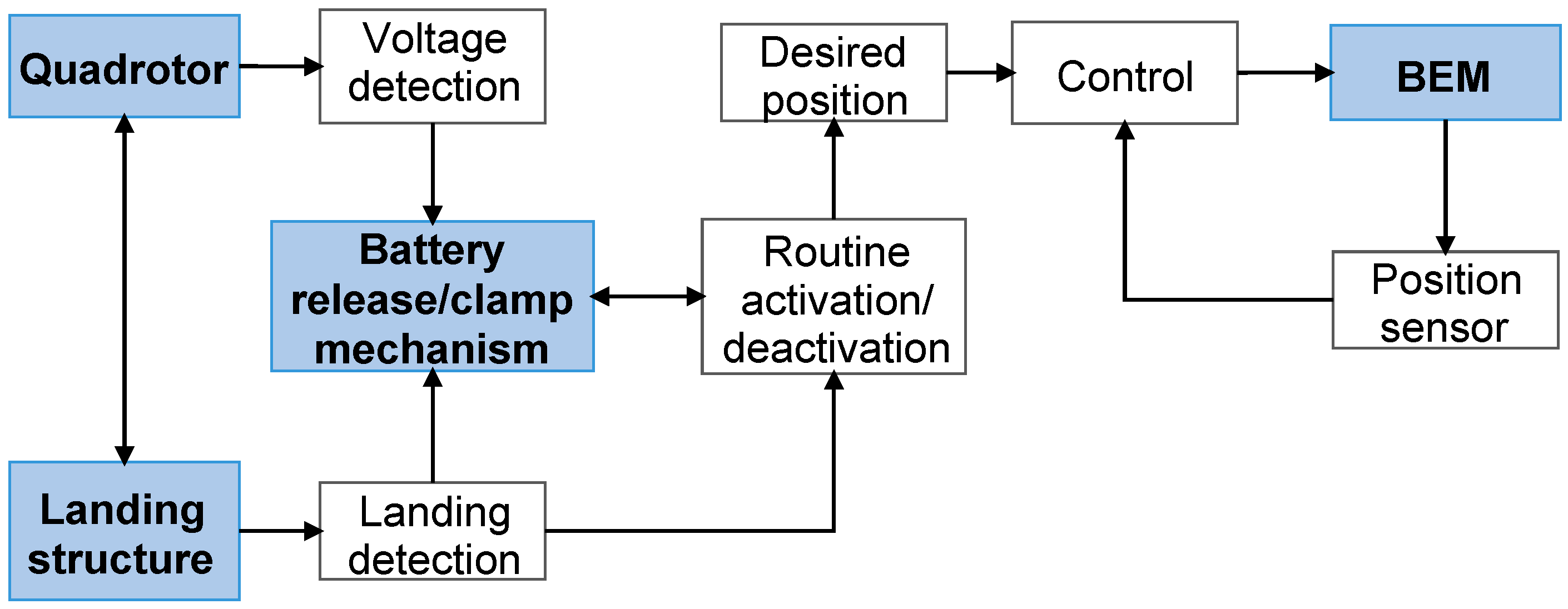
4. Control and Operation Scheme
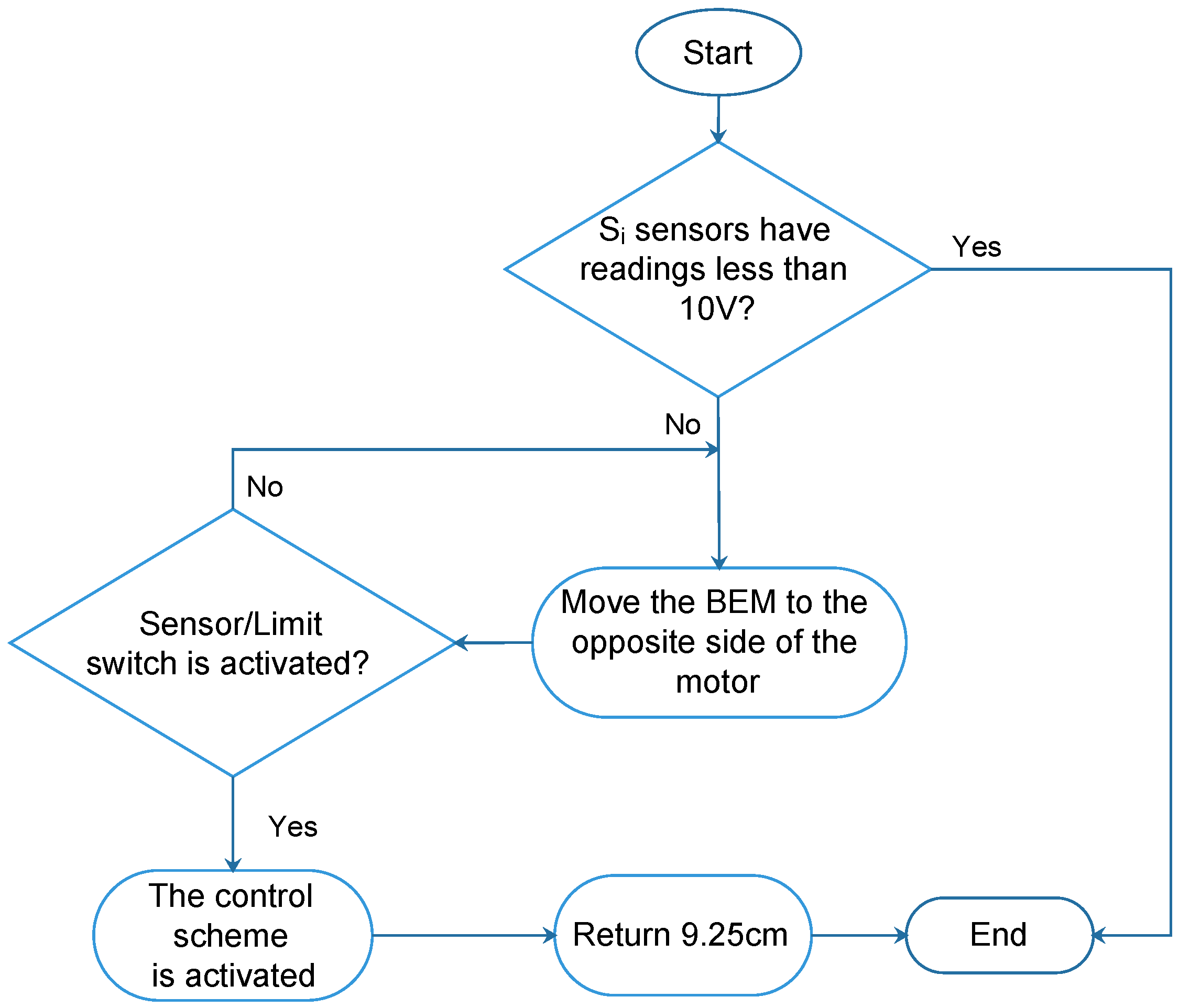
4.1. BEM Operation Logic
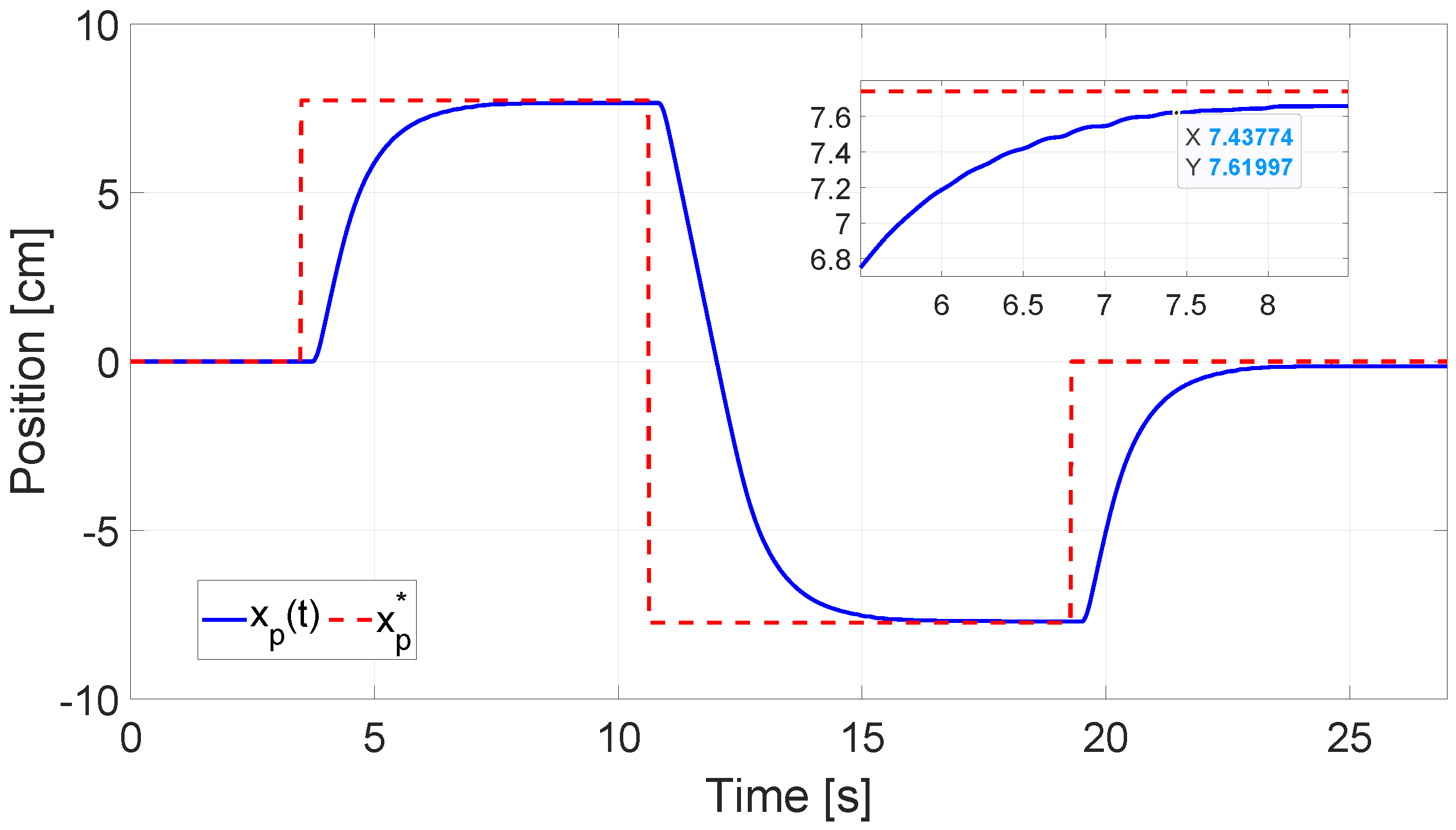
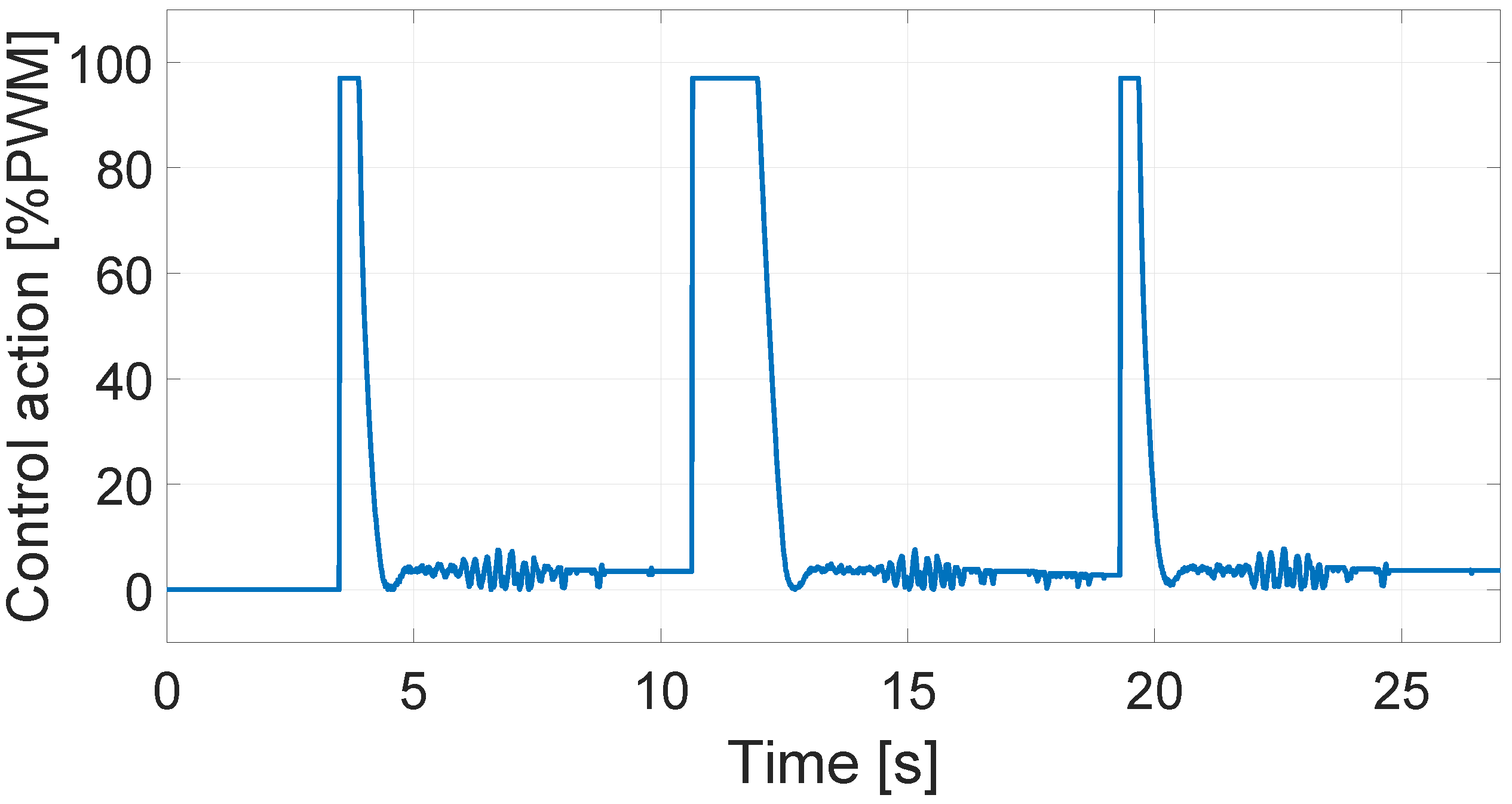
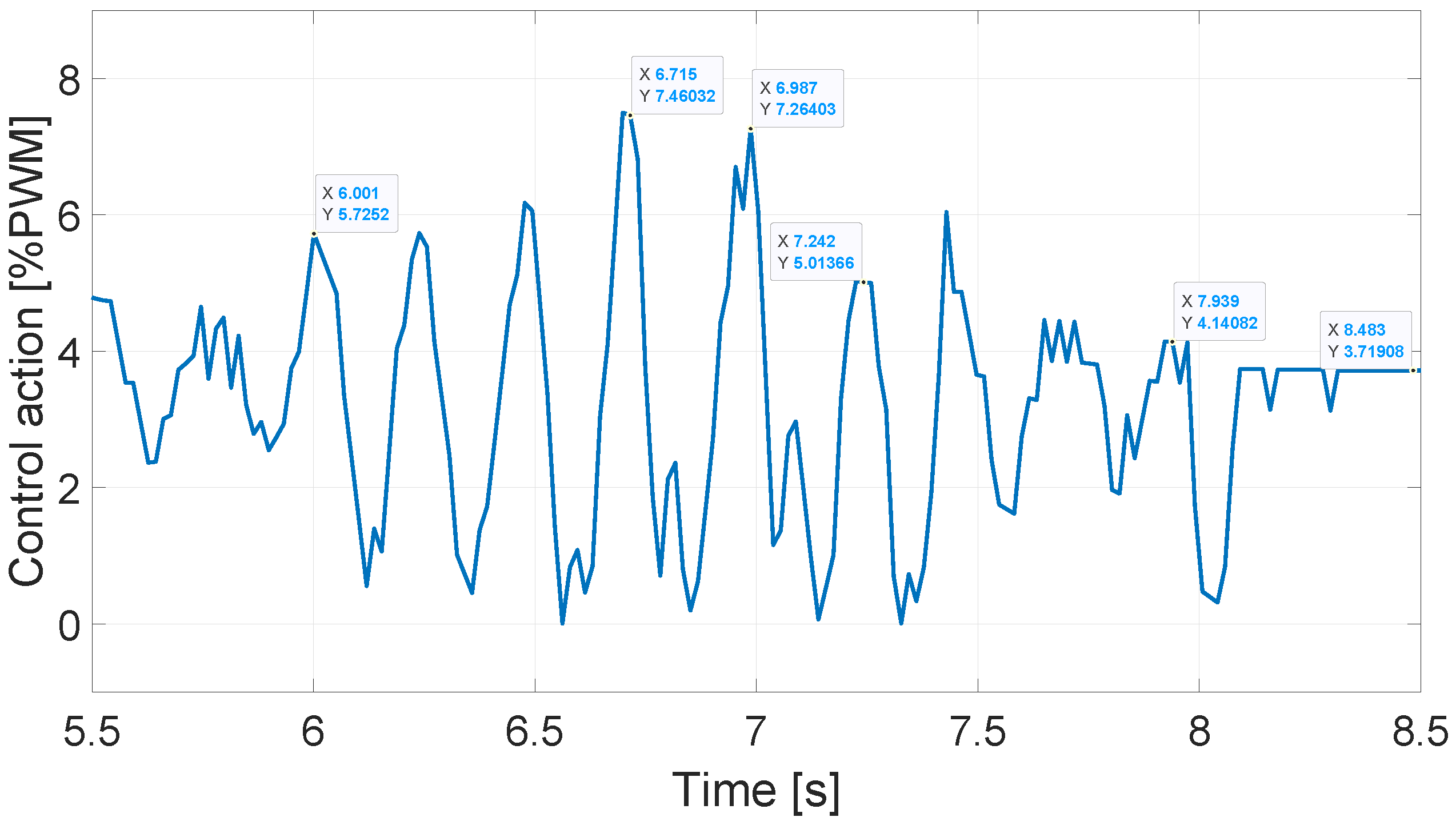
4.1.1. Position Control in the BEM
4.1.2. Calibration Routine
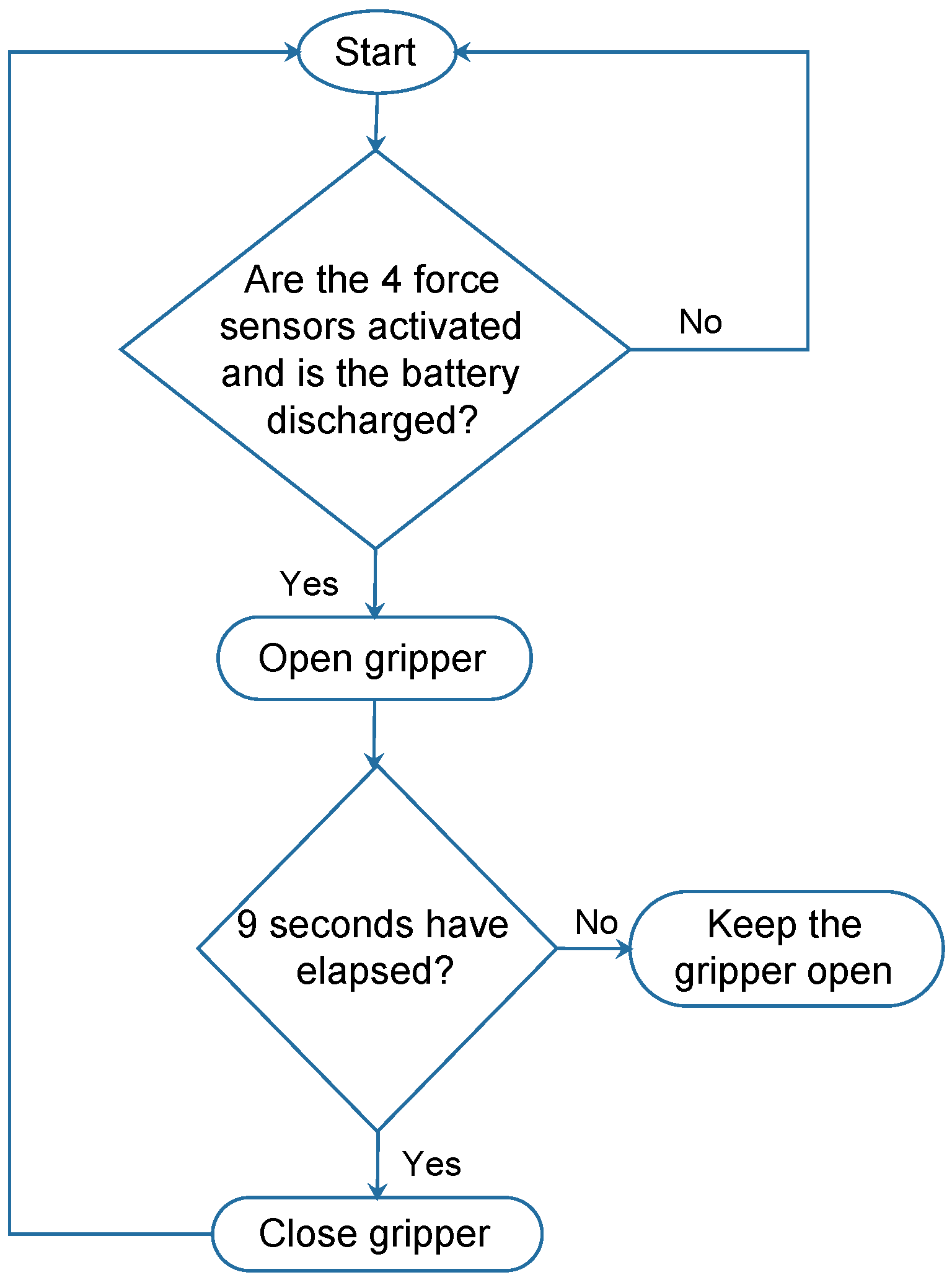
4.2. Battery Release/Clamp Mechanism Operation
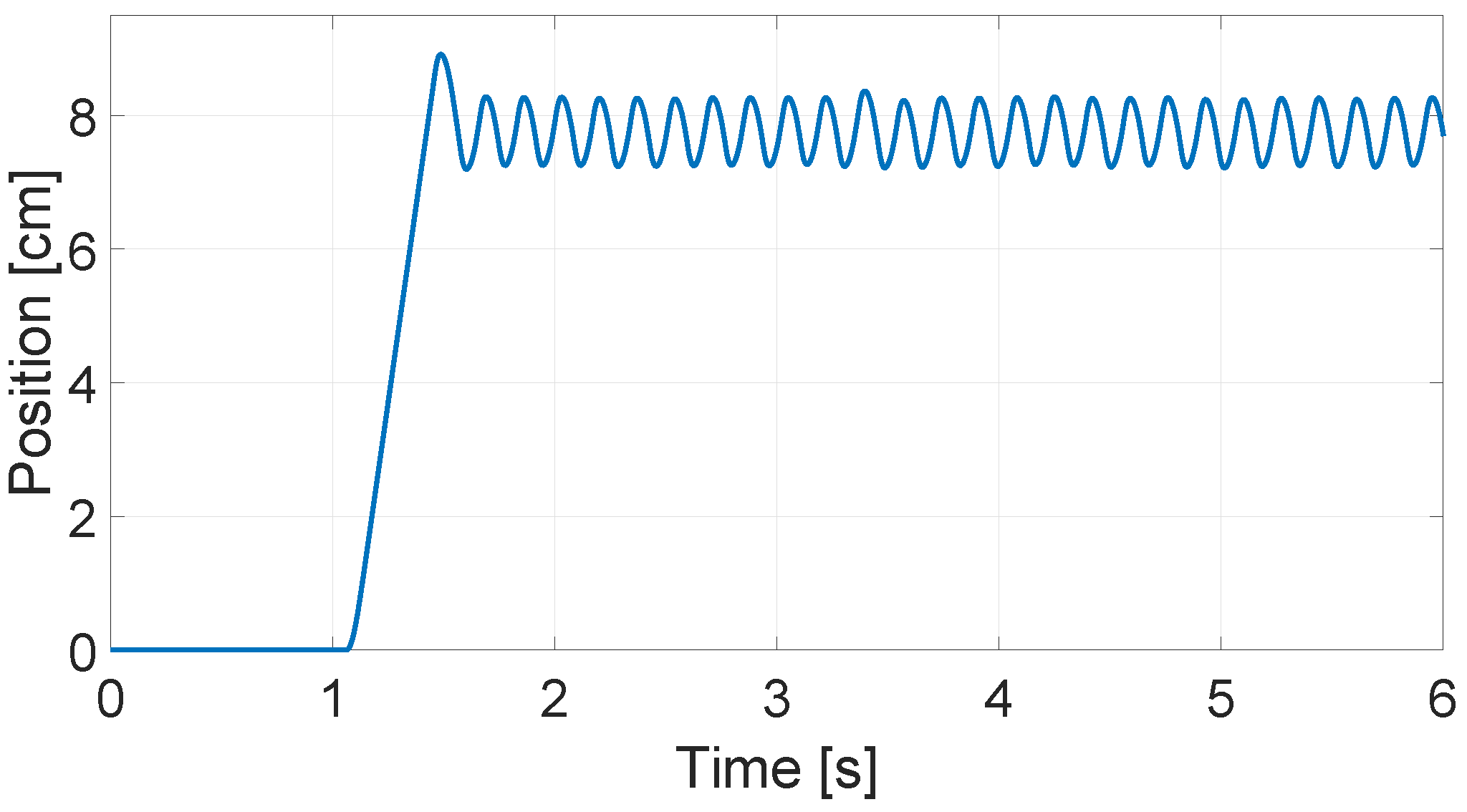
5. Results and Discussion
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Chamola, V.; Kotesh, P.; Agarwal, A.; Gupta, N.; Guizani, M. A comprehensive review of unmanned aerial vehicle attacks and neutralization techniques. Ad Hoc Netw. 2021, 111, 102324. [Google Scholar] [CrossRef] [PubMed]
- Ragel, R.; Maza, I.; Caballero, F.; Ollero, A. Plataforma para el Aterrizaje y el Intercambio de Baterıas Automático para un UAV de tipo VTOL. In Proceedings of the Actas de las XXXVI Jornadas de Automática, Bilbao, Spain, 2–4 September 2015; pp. 338–344. [Google Scholar]
- Fujii, K.; Higuchi, K.; Rekimoto, J. Endless flyer: A continuous flying drone with automatic battery replacement. In Proceedings of the 2013 IEEE 10th International Conference on Ubiquitous Intelligence and Computing and 2013 IEEE 10th International Conference on Autonomic and Trusted Computing, Vietri sul Mare, Italy, 18–21 December 2013; pp. 216–223. [Google Scholar]
- Lozano-Hernández, Y.; Gutiérrez Frías, O.; Lozada-Castillo, N.; Luviano-Juárez, A. Control algorithm for taking off and landing manoeuvres of quadrotors in open navigation environments. Int. J. Control Autom. Syst. 2019, 17, 2331–2342. [Google Scholar] [CrossRef]
- Lozano, Y.; Gutiérrez, O. Design and control of a four-rotary-wing aircraft. IEEE Lat. Am. Trans. 2016, 14, 4433–4438. [Google Scholar] [CrossRef]
- Bauranov, A.; Rakas, J. Designing airspace for urban air mobility: A review of concepts and approaches. Prog. Aerosp. Sci. 2021, 125, 100726. [Google Scholar] [CrossRef]
- Xu, Y.; Dan, Y.; Raymond, M.T. Production of Solar-powered Quad-copter for Agricultural Field Spraying. J. Phys. Conf. Ser. 2022, 2383, 012036. [Google Scholar] [CrossRef]
- Silva, M.; Mourato, A.; Marques, G.; Sargento, S.; Reis, A. A Platform for Autonomous Swarms of UAVs. In Proceedings of the 2022 IEEE Symposium on Computers and Communications (ISCC), Rhodes, Greece, 30 June–3 July 2022; pp. 1–6. [Google Scholar]
- Boukoberine, M.N.; Zhou, Z.; Benbouzid, M. A critical review on unmanned aerial vehicles power supply and energy management: Solutions, strategies, and prospects. Appl. Energy 2019, 255, 113823. [Google Scholar] [CrossRef]
- Moon, G.; Kim, Y. Optimum flight path design passing through waypoints for autonomous flight control system. In Proceedings of the AIAA Guidance, Navigation, and Control Conference and Exhibit, Austion, TX, USA, 11–14 August 2003; p. 5334. [Google Scholar]
- Mohsan, S.A.H.; Othman, N.Q.H.; Khan, M.A.; Amjad, H.; Żywiołek, J. A comprehensive review of micro UAV charging techniques. Micromachines 2022, 13, 977. [Google Scholar] [CrossRef]
- Michini, B.; Toksoz, T.; Redding, J.; Michini, M.; How, J.; Vavrina, M.; Vian, J. Automated battery swap and recharge to enable persistent UAV missions. In Infotech@Aerospace 2011; American Institute of Aeronautics and Astronautics: Reston, VA, USA, 2011; p. 1405. [Google Scholar]
- Mulgaonkar, Y. Small, Safe Quadrotors for Autonomous Flight. Ph.D. Thesis, University of Pennsylvania, Philadelphia, PA, USA, 2019. [Google Scholar]
- Lee, D.; Zhou, J.; Lin, W.T. Autonomous battery swapping system for quadcopter. In Proceedings of the 2015 International Conference on Unmanned Aircraft Systems (ICUAS), Denver, CO, USA, 9–12 June 2015; pp. 118–124. [Google Scholar]
- Swieringa, K.A.; Hanson, C.B.; Richardson, J.R.; White, J.D.; Hasan, Z.; Qian, E.; Girard, A. Autonomous battery swapping system for small-scale helicopters. In Proceedings of the 2010 IEEE international conference on robotics and automation, Anchorage, AK, USA, 3–7 May 2010; pp. 3335–3340. [Google Scholar]
- Zhou, F.; Wu, Y.; Hu, R.Q.; Qian, Y. Computation rate maximization in UAV-enabled wireless-powered mobile-edge computing systems. IEEE J. Sel. Areas Commun. 2018, 36, 1927–1941. [Google Scholar] [CrossRef] [Green Version]
- Dunbar, S.; Wenzl, F.; Hack, C.; Hafeza, R.; Esfeer, H.; Defay, F.; Prothin, S.; Bajon, D.; Popovic, Z. Wireless far-field charging of a micro-UAV. In Proceedings of the 2015 IEEE Wireless Power Transfer Conference (WPTC), Boulder, CO, USA, 13–15 May 2015; pp. 1–4. [Google Scholar]
- Alhassan, A.B.; Zhang, X.; Shen, H.; Xu, H. Power transmission line inspection robots: A review, trends and challenges for future research. Int. J. Electr. Power Energy Syst. 2020, 118, 105862. [Google Scholar] [CrossRef]
- Mohsan, S.A.H.; Khan, M.A.; Noor, F.; Ullah, I.; Alsharif, M.H. Towards the unmanned aerial vehicles (UAVs): A comprehensive review. Drones 2022, 6, 147. [Google Scholar] [CrossRef]
- Chittoor, P.K.; Chokkalingam, B.; Mihet-Popa, L. A review on UAV wireless charging: Fundamentals, applications, charging techniques and standards. IEEE Access 2021, 9, 69235–69266. [Google Scholar] [CrossRef]
- Pan, Z.; An, L.; Wen, C. Recent advances in fuel cells based propulsion systems for unmanned aerial vehicles. Appl. Energy 2019, 240, 473–485. [Google Scholar] [CrossRef]
- Hwang, J.J.; Kuo, J.K.; Wu, W.; Chang, W.R.; Lin, C.H.; Wang, S.E. Lifecycle performance assessment of fuel cell/battery electric vehicles. Int. J. Hydrogen Energy 2013, 38, 3433–3446. [Google Scholar] [CrossRef]
- Kemper, F.P.; Suzuki, K.A.; Morrison, J.R. UAV consumable replenishment: Design concepts for automated service stations. J. Intell. Robot. Syst. 2011, 61, 369–397. [Google Scholar] [CrossRef]
- Ure, N.K.; Toksoz, T.; Chowdhary, G.; Redding, J.; How, J.; Vavrina, M.; Vian, J. Experimental demonstration of multi-agent learning and planning under uncertainty for persistent missions with automated battery management. In Proceedings of the AIAA Guidance, Navigation, and Control Conference, Minneapolis, MN, USA, 13–16 August 2012; p. 4622. [Google Scholar]
- Malyuta, D.; Brommer, C.; Hentzen, D.; Stastny, T.; Siegwart, R.; Brockers, R. Long-duration fully autonomous operation of rotorcraft unmanned aerial systems for remote-sensing data acquisition. J. Field Robot. 2020, 37, 137–157. [Google Scholar] [CrossRef] [Green Version]
- Grlj, C.G.; Krznar, N.; Pranjić, M. A Decade of UAV Docking Stations: A Brief Overview of Mobile and Fixed Landing Platforms. Drones 2022, 6, 17. [Google Scholar]
- Smith, C.A. Automated Continuous Process Control; John Wiley & Sons: Hoboken, NJ, USA, 2003. [Google Scholar]
- Demirhan, M.; Premachandra, C. Development of an automated camera-based drone landing system. IEEE Access 2020, 8, 202111–202121. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K.; Nguyen, N.P.; Le, T.L. Autonomous quadcopter precision landing onto a heaving platform: New method and experiment. IEEE Access 2020, 8, 167192–167202. [Google Scholar] [CrossRef]
- Jain, K.P.; Mueller, M.W. Flying batteries: In-flight battery switching to increase multirotor flight time. In Proceedings of the 2020 IEEE International Conference on Robotics and Automation (ICRA), Paris, France, 31 May–31 August 2020; pp. 3510–3516. [Google Scholar]
- Galimov, M.; Fedorenko, R.; Klimchik, A. UAV Positioning Mechanisms in Landing Stations: Classification and Engineering Design Review. Sensors 2020, 20, 3648. [Google Scholar] [CrossRef]
- Verstraete, D.; MacNeill, R. The Effects of Blockage on the Performance of Small Propellers. In Proceedings of the 20th Australasian Fluid Mechanics Conference, Perth, Australia, 5–8 December 2016. [Google Scholar]
- Papayanopoulos, J.F. Autonomous UAV Precision Item Pickup. Ph.D. Thesis, Georgia Institute of Technology, Atlanta, GA, USA, 2017. [Google Scholar]
- Bock, S. New open-source ANSYS-SolidWorks-FLAC3D geometry conversion programs. J. Sustain. Min. 2015, 14, 124–132. [Google Scholar] [CrossRef] [Green Version]
- Lubliner, J. Plasticity Theory; Courier Corporation: Chelmsford, MA, USA, 2008. [Google Scholar]
- Kamen, E.W.; Heck, B.S. Fundamentals of Signals and Systems Using the Web and Matlab; Pearson New International: London, UK, 2014. [Google Scholar]
- Ayachi Amor, Y.; Kheldoun, A.; Metidji, B.; Hamoudi, F.; Merazka, A.; Lazoueche, Y. Implementation of modified SVPWM for three-level inverter using STM32F4. In Proceedings of the 2018 International Conference on Electrical Sciences and Technologies in Maghreb (CISTEM), Algiers, Algeria, 28–31 October 2018; pp. 1–6. [Google Scholar]
- Hetmańczyk, J.; Stenzel, T.; Grzesik, B. Selected aspects of design and modelling of linear actuator based on PM BLDC motor. Przegląd Elektrotechniczny 2015, 6. [Google Scholar] [CrossRef] [Green Version]
- Ahmed, H.; Singh, G.; Bhardwaj, V.; Saurav, S.; Agarwal, S. Controlling of DC Motor using Fuzzy logic controller. In Proceedings of the Conference on Advances in Communication and Control Systems, Khartoum, Sudan, 16–18 January 2013; pp. 666–670. [Google Scholar]
- Elsrogy, W.M.; Fkirin, M.; Moustafa Hassan, M.A. Speed control of DC motor using PID controller based on artificial intelligence techniques. In Proceedings of the 2013 International Conference on Control, Decision and Information Technologies (CoDIT), Hammamet, Tunisia, 6–8 May 2013; pp. 196–201. [Google Scholar]
- Montiel, O.; Sepulveda, R.; Melin, P.; Castillo, O.; Porta, M.; Meza, I.M. Performance of a simple tuned fuzzy controller and a PID controller on a DC motor. In Proceedings of the 2007 IEEE Symposium on Foundations of Computational Intelligence, Honolulu, HI, USA, 1–5 April 2007; pp. 531–537. [Google Scholar]
- Abro, G.E.M.; Asirvadam, V.S.; Zulkifli, S. Single-Input Fuzzy-Sliding Mode Control for an Underactuated Quadrotor Craft. In Proceedings of the 2020 IEEE 2nd International Conference on Artificial Intelligence in Engineering and Technology (IICAIET), Kinabalu, Malaysia, 26–27 September 2020; pp. 1–6. [Google Scholar]
- Lee, S.J.; Jang, I.; Kim, H.J. Fail-Safe Flight of a Fully-Actuated Quadrotor in a Single Motor Failure. IEEE Robot. Autom. Lett. 2020, 5, 6403–6410. [Google Scholar] [CrossRef]
- Manouchehri, P.; Ghasemi, R.; Toloei, A. Distributed Fuzzy Adaptive Sliding Mode Formation for Nonlinear Multi-quadrotor Systems. Int. J. Eng. 2020, 33, 798–804. [Google Scholar]
- Grobler, R. Automated recharging and vision-based improved localisation for a quadrotor UAV. Ph.D. Thesis, Stellenbosch University, Stellenbosch, South Africa, 2021. [Google Scholar]
- Rajabi, M.S.; Beigi, P.; Aghakhani, S. Drone Delivery Systems and Energy Management: A Review and Future Trends. arXiv 2022, arXiv:2206.10765. [Google Scholar]
- De Silva, S.C.; Phlernjai, M.; Rianmora, S.; Ratsamee, P. Inverted Docking Station: A Conceptual Design for a Battery-Swapping Platform for Quadrotor UAVs. Drones 2022, 6, 56. [Google Scholar] [CrossRef]
- Bongermino, E.; Mastrorocco, F.; Tomaselli, M.; Monopoli, V.G.; Naso, D. Model and energy management system for a parallel hybrid electric unmanned aerial vehicle. In Proceedings of the 2017 IEEE 26th International Symposium on Industrial Electronics (ISIE), Edinburgh, UK, 19–21 June 2017; pp. 1868–1873. [Google Scholar]
- Glassock, R.; Hung, J.; Gonzalez, L.; Walker, R. Multimodal hybrid powerplant for unmanned aerial systems (UAS) Robotics. In Proceedings of the Twenty-Fourth Bristol International Unmanned Air Vehicle Systems Conference, Bristol, UK, 30 March–1 April 2009; University of Bristol: Bristol, UK, 2009; pp. 1–13. [Google Scholar]
- Ou, K.; Yuan, W.W.; Choi, M.; Yang, S.; Jung, S.; Kim, Y.B. Optimized power management based on adaptive-PMP algorithm for a stationary PEM fuel cell/battery hybrid system. Int. J. Hydrogen Energy 2018, 43, 15433–15444. [Google Scholar] [CrossRef]























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Battery | Exchange Mechanism |
|---|---|
| Dimensions: 32 × 50 × 160 mm | Rail length: 0.35 m |
| Weight: 498 g | Maximum rail displacement: 100 mm |
| Time for exchange: 10 s |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Lozano-Hernández, Y.; Martínez de la Cruz, I.; Gutiérrez-Frías, O.; Lozada-Castillo, N.; Luviano-Juárez, A. Design Procedure of a Low-Cost System for Energy Replenishment in a Quadrotor UAV through a Battery Exchange Mechanism. Drones 2023, 7, 270. https://doi.org/10.3390/drones7040270
Lozano-Hernández Y, Martínez de la Cruz I, Gutiérrez-Frías O, Lozada-Castillo N, Luviano-Juárez A. Design Procedure of a Low-Cost System for Energy Replenishment in a Quadrotor UAV through a Battery Exchange Mechanism. Drones. 2023; 7(4):270. https://doi.org/10.3390/drones7040270
Chicago/Turabian StyleLozano-Hernández, Yair, Ismael Martínez de la Cruz, Octavio Gutiérrez-Frías, Norma Lozada-Castillo, and Alberto Luviano-Juárez. 2023. "Design Procedure of a Low-Cost System for Energy Replenishment in a Quadrotor UAV through a Battery Exchange Mechanism" Drones 7, no. 4: 270. https://doi.org/10.3390/drones7040270