
On Countermeasures against Cooperative Fly of UAV Swarms

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Cooperative Fly Detection for UAV Swarm
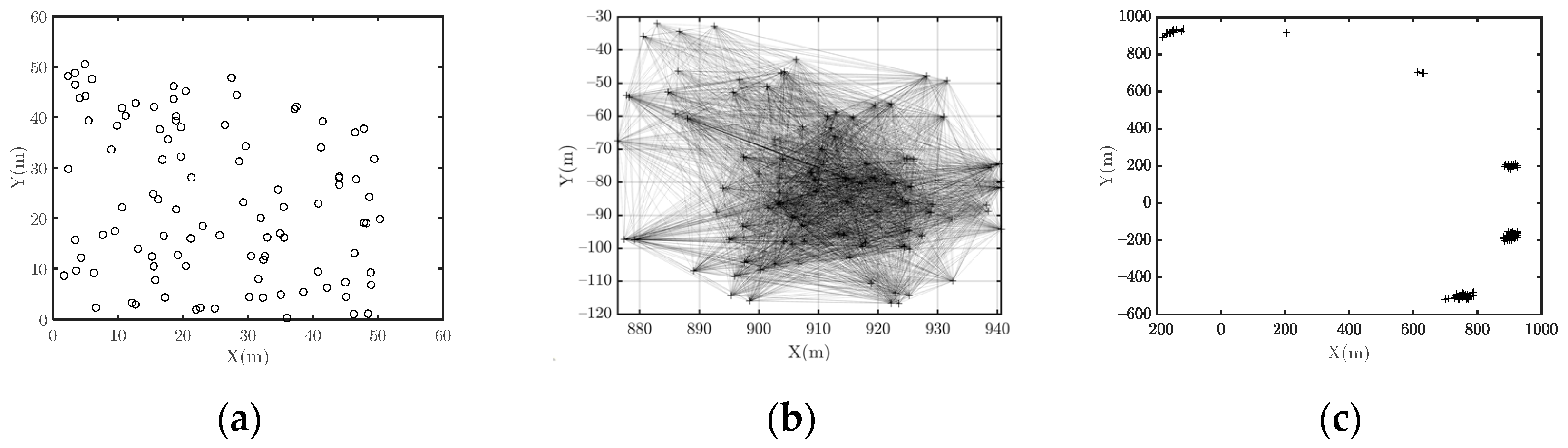
2.1. UAV Swarm Cluster Motion Model
2.2. Cooperative Fly Detection of UAV Swarm
2.2.1. Analysis of Existing Algorithms
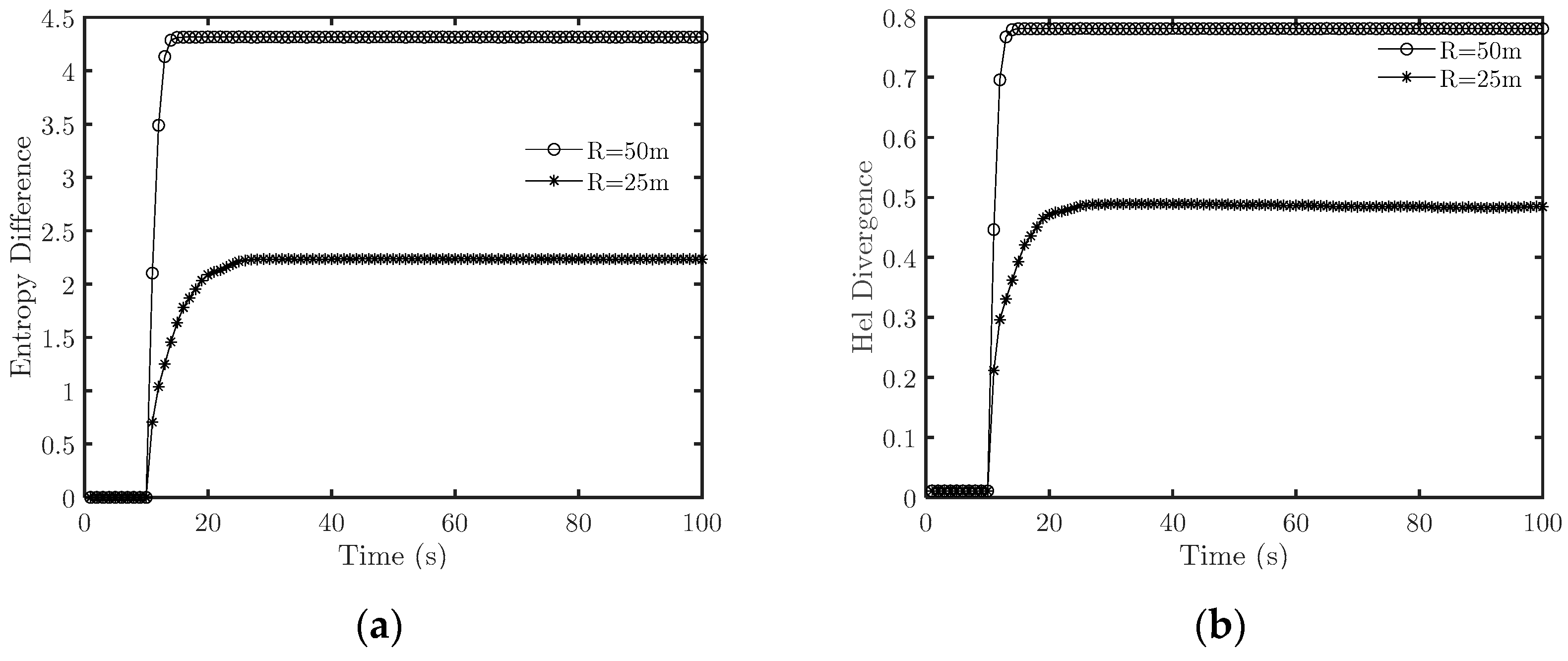
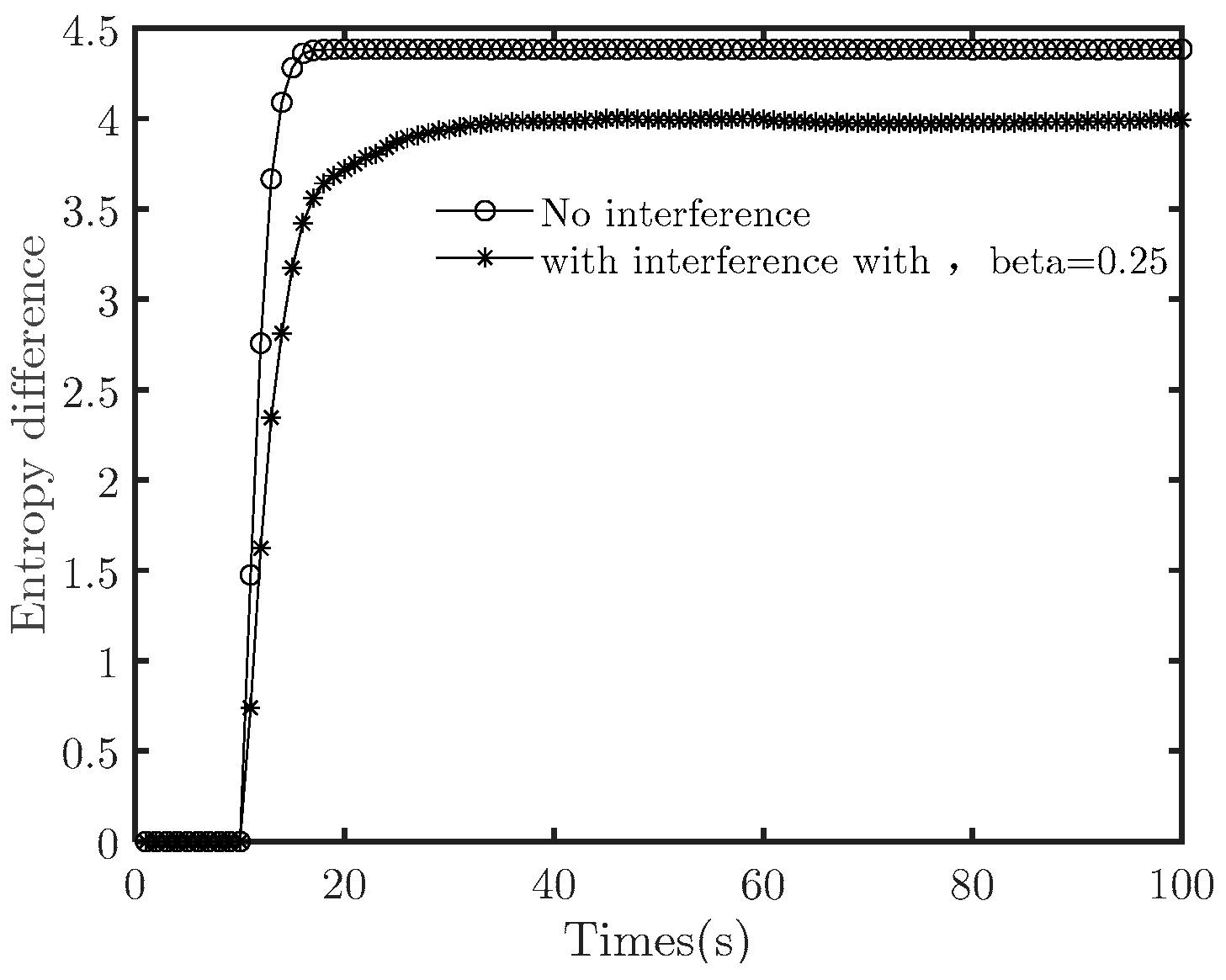
- Entropy-difference-based method [19]
- 2.
- Diversity-based method
2.2.2. Detection Algorithm of Cooperative Fly of the UAV Swarm Based on Double Thresholds
| Algorithm 1. Detection of the Cooperative Fly Emergence based on a Double Threshold |
| ① Set the initial parameter value to ② Monitor whether the target UAV swarm appears. If the target UAV swarm is detected, measure the velocity angles of the individual UAV . Set t = 0, evaluate the PDF of according to Formula (8), and calculate H0 according to Formula (5), that is . ③ At t, measure the velocity angles of the individual UAV , evaluate its PDF according to Formula (8), and calculate the entropy difference . If , record t as the emergence start time , record , and go to step ④. Otherwise, go to step ③. ④ Set the slide window k to 2, monitor the target system, and record the following state parameters: a. measure the nodes’ velocity angles and evaluate its PDF according to Formula (6), calculate and , evaluate the nodes’ position and calculate according to Formula (10). If , record t as and go to step ⑤. Otherwise, go to step b and calculate the three successive entropy differences and . b. If , then the cooperative fly emergence is achieved, and the inference terminates. Record }. ⑤ Record the detection result and . |
3. Suppression Algorithm of Cooperative Fly for Anti-UAV Swarm
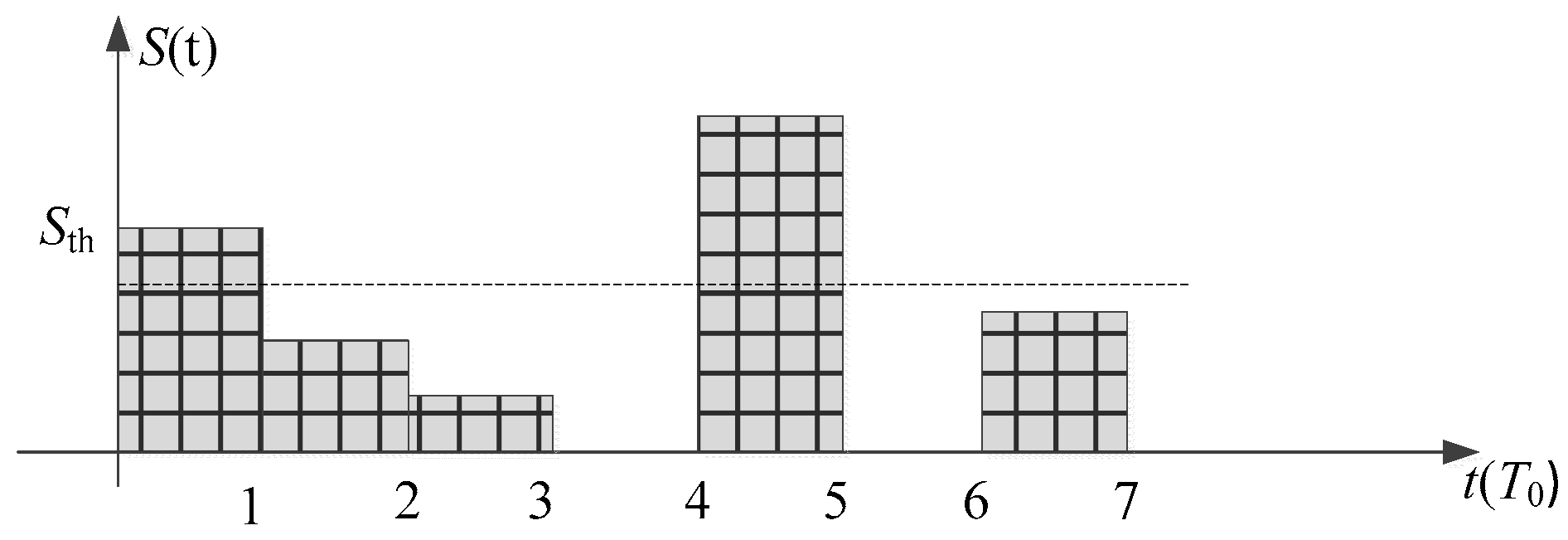
3.1. RF Interference Behavior Modeling
3.2. Effectiveness Analysis of Suppression Behavior
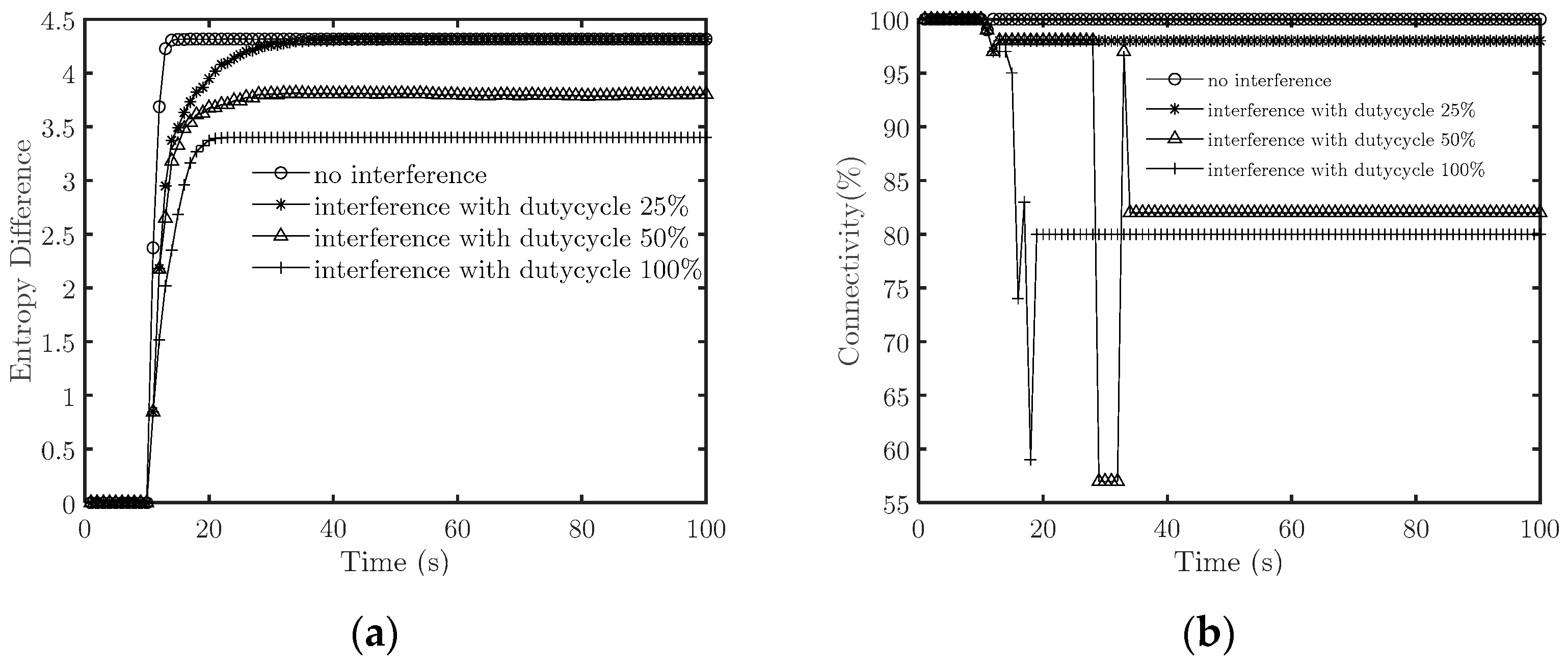
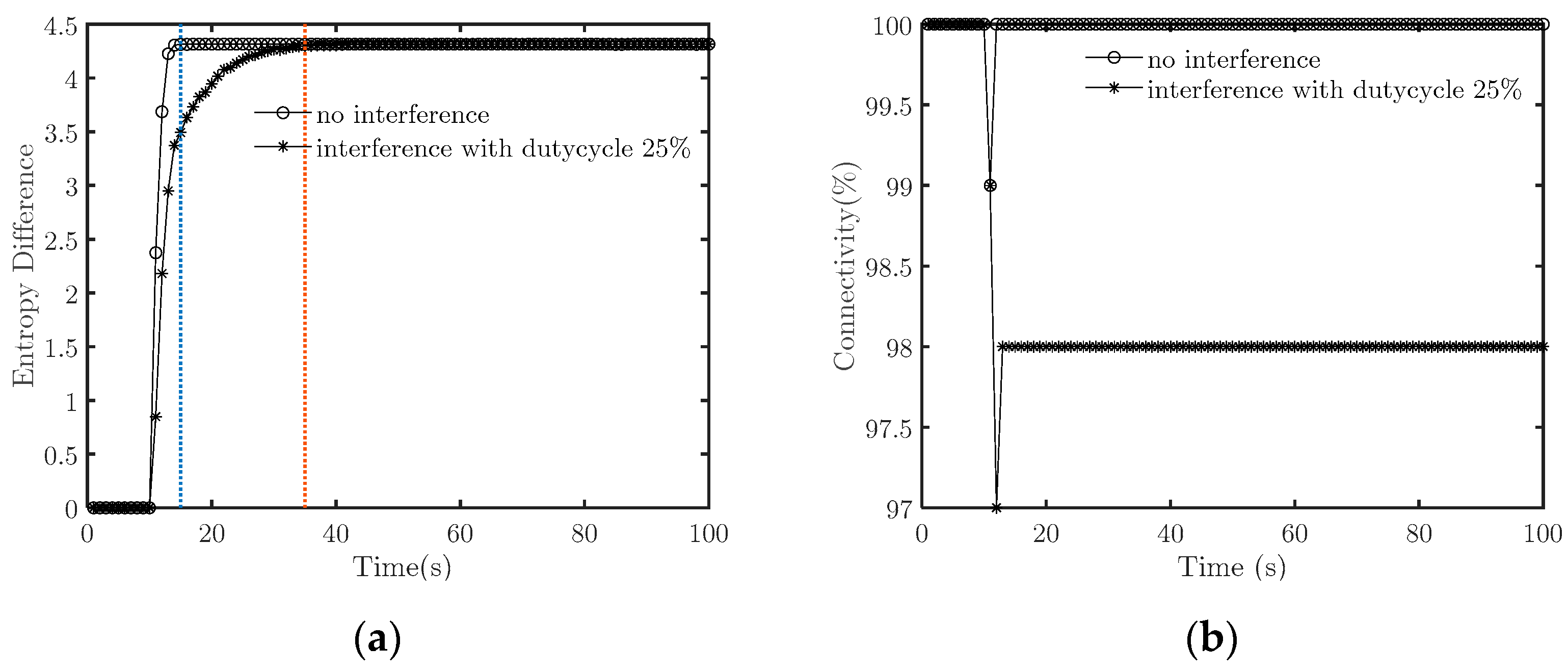
3.2.1. Effectiveness of Suppression Behavior with Equal Intensity and Different Duty Cycles
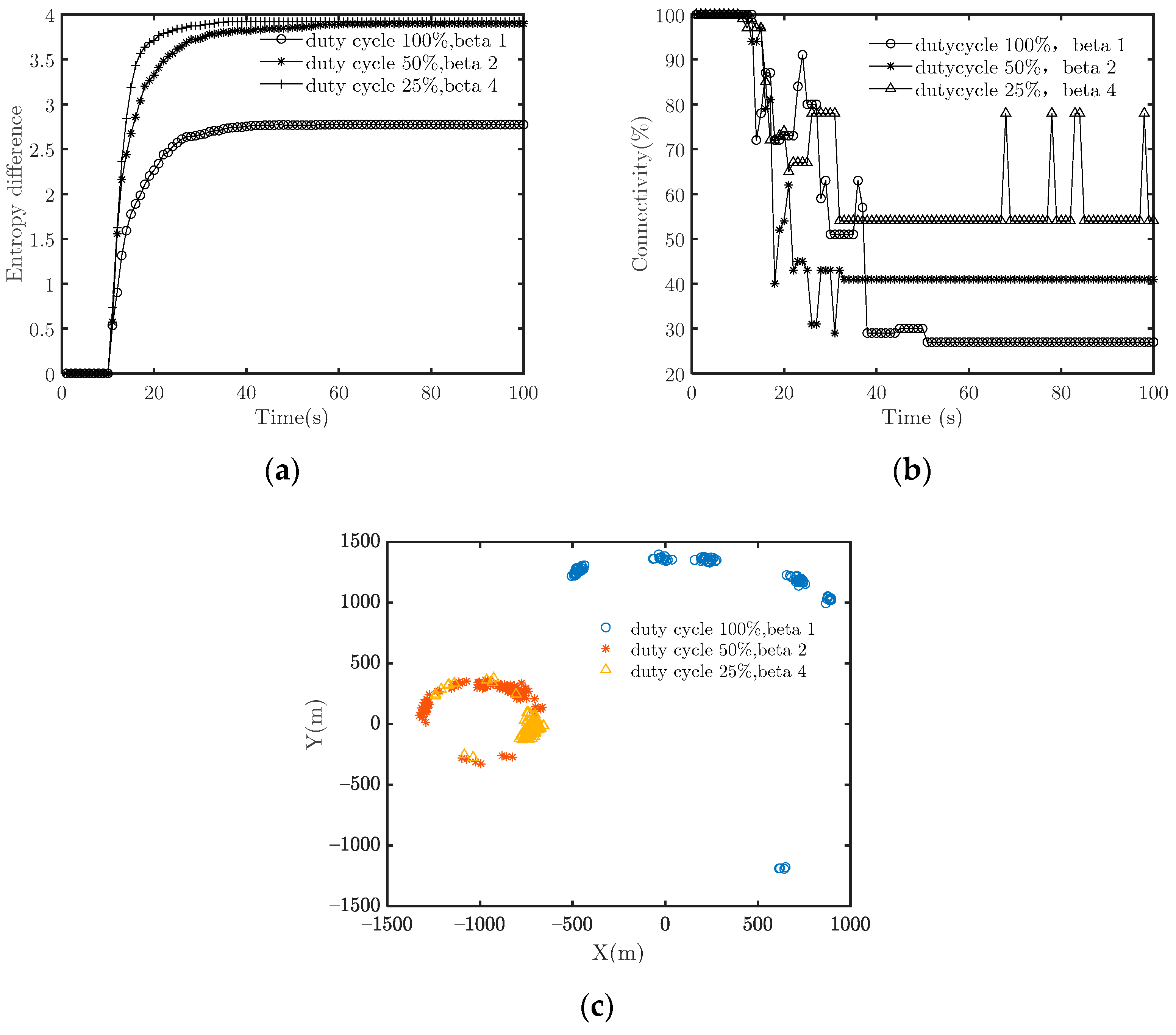
3.2.2. Effectiveness with Equal Average Signal Strength and Different Duty Cycles
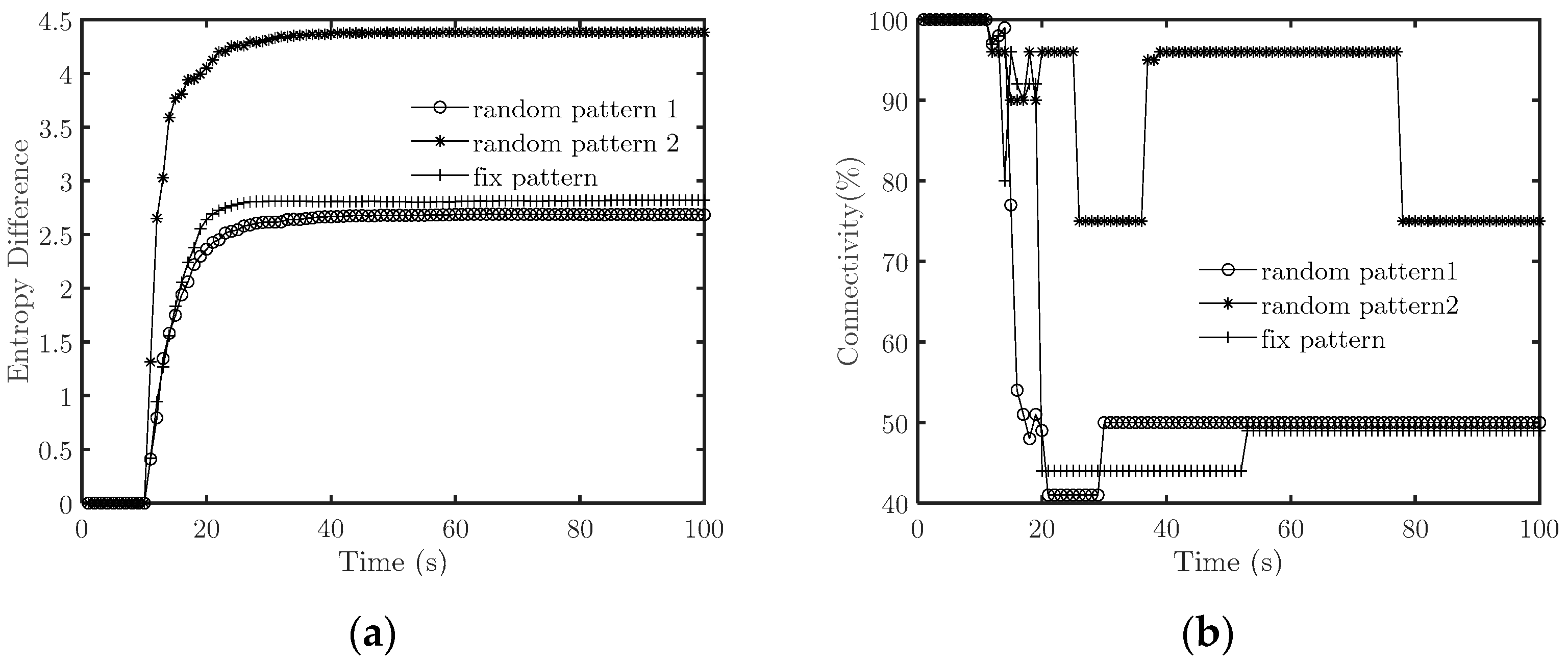
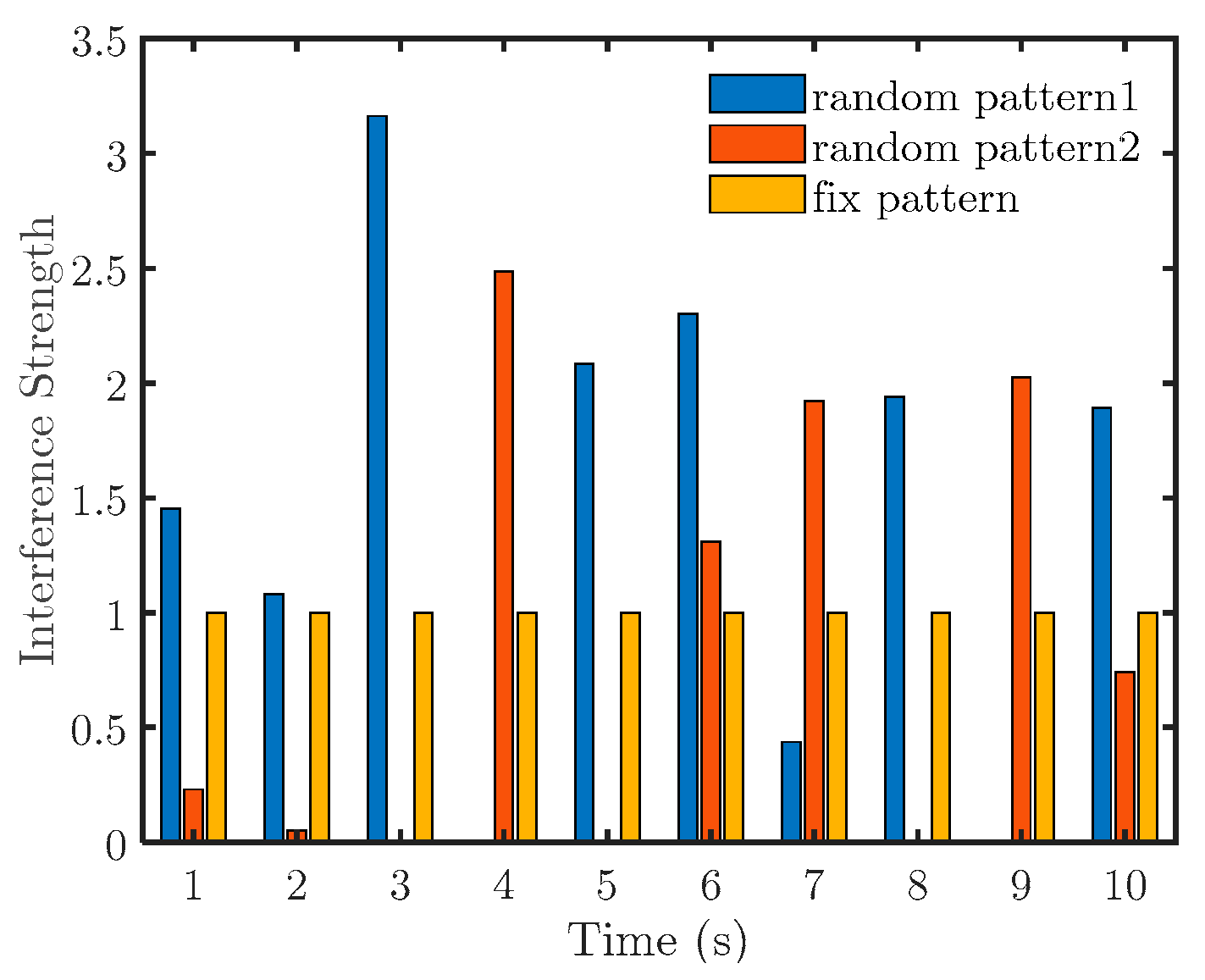
3.2.3. Effectiveness of Random and Regular Interference Patterns with Equal Average Intensity
4. Anti-UAV Swarm through Suppression of Cooperative Fly
4.1. Counteraction Algorithm for Cooperative Fly
| Algorithm 2. Counterattack against Cooperative Fly |
| ① Initialize connectivity threshold , and start monitoring. If the target system is detected, go to step ②. Otherwise, go to step ①. ② Use Algorithm 1 to determine whether the target system starts the cooperative fly. If it starts, go to step ③. Otherwise, go to step ②. ③ Measure the distance to the target cluster and calculate the path loss as [25]: and f is the operating frequency. The path loss is calculated as follows: ; ④ Generate interference pattern according to counter intention and and emit the interference signal. The interference pattern is as follows: 4a. To delay cooperative fly, a low-intensity continuous jamming signal (i.e., duty cycle 100%) is sent, and the equivalent noise figure is set to , 4b. To break the cooperative fly, the equivalent noise figure of medium intensity continuous jamming signal (i.e., 100% duty cycle) is sent, and the equivalent noise figure is set to ⑤ Measure . If , or and the target system achieves cooperative fly, immediately terminating the interference. |
4.2. Simulations and Discussions
4.2.1. Countermeasures to Destroy Cooperative Fly
4.2.2. Countermeasures to Delay Cooperative Fly
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Wu, T.; Feng, W.; Zhang, H. Research on the conceptual model of uav hive to sea combat. Command. Control. Simul. 2022, 44, 7–11. [Google Scholar]
- Niu, W.; Huang, J.; Miu, L. Research on the Concept and Key Technology of UAV Swarm to Sea Warfare. Command. Control. Simul. 2018, 40, 8–14. [Google Scholar]
- Walter, B.; Sammier, A.; Reiners, D.; Oliver, J. UAV Swarm Control: Calculating Digital Pheromone Fields with the GPU. J. Def. Model. Simul. 2006, 3, 167–176. [Google Scholar] [CrossRef]
- Ben, C. Gremlin Drone Recovered in Mid-Air for the First Time [OL]. Available online: https://newatlas.com/drones/gremlin-drone-recovery-mid-air/.2021.11 (accessed on 1 November 2021).
- Reilly, B. Gremlins program successfully retrieves drone in mid-flight. Inside Air Force 2021, 45, 1–32. [Google Scholar]
- Zhang, J.; He, Y.; Pan, X.; Qiao, Z.; Chen, H.; Shen, J.; Yang, Z. Vulnerability Analysis of UAV against Mesoband Electromagnetic Pulse. J. Proj. Rocket. Missiles Guid. 2020, 40, 110–115. [Google Scholar]
- Zhao, T.; Yu, D.; Zhou, D.; Chai, M.; He, K.; Zhou, C.; Wei, J. Ultra-wide spenctrum electromagnetic pulse effect and experimental analysis of UAV GPS Receiver. High Power Laser Part. Beams 2019, 31, 023001. [Google Scholar]
- Wang, T.; Peng, S.; Wang, G. Analysis of the Interference Mechanism of High PRF Pulse Jamming to the Front End of GPS Receiver. J. Air Force Early Warn. Acad. 2021, 35, 248–253. [Google Scholar]
- Fu, X.; Zhao, R.; Liang, Y.; Yan, Y. Review on the Development of Anti UAV Bee Colony Technology. J. CAEIT 2022, 17, 421–428. [Google Scholar]
- Hwang, S.P.; Kim, D.H. A Study on the Establishment of Anti-Drone system for the Protection of National Important Facilities. Soc. Digit. Policy Manag. 2020, 18, 247–257. [Google Scholar]
- Jie, C.; Miao, Z.; Ye, T. Research on the Development of Active Anti UAV System of US Army. Aerodyn. Missile J. 2020, 12, 36–42. [Google Scholar]
- Qiu, H.; Duan, H. From collective flight in bird flocks to unmanned aerial vehicle autonomous swarm formation. J. Eng. Sci. 2017, 39, 317–322. [Google Scholar]
- Zhao, H.; Gao, S.; Wang, H.; Yong, T.; Wei, J. Evaluation method for autonomous communication and networking capability of UAV. J. Commun. 2020, 41, 87–98. [Google Scholar]
- Qiu, H.; Duan, H.; Fan, Y.M. Unmanned aerial vehicle close formation cooperative control based on predatory escaping pigeon-inspired optimization. Sci. Sin. Technol. 2015, 41, 559–572. [Google Scholar]
- Liu, Q.; He, M.; Liu, J.; Xu, D.; Ding, N.; Wang, Y. A Mechanism for Identifying and Suppressing the Emergent Flocking Behaviors of UAV Swarms. Acta Electron. Sin. 2019, 047, 374–381. [Google Scholar]
- Liu, Q.; He, M.; Xu, D.; Ding, N.; Wang, Y. A Mechanism for Recognizing and Suppressing the Emergent Behavior of UAV Swarm. Math. Probl. Eng. 2018, 2018, 6734923. [Google Scholar] [CrossRef]
- Namuduri, K.; Wan, Y.; Gomathisankaran, M. Mobile Ad Hoc Networks in the Sky: State of the Art, Opportunities, and Challenges; Acm Mobihoc Workshop on Airborne Networks & Communications; ACM: New York, NY, USA, 2013. [Google Scholar]
- Tamas, V.; Andras, C.; Eshel, B.-J.; Cohen, I.; Shochet, O. Novel Type of Phase Transition in a System of Self-Driven Particles. Phys. Rev. Lett. 1995, 75, 1226–1229. [Google Scholar]
- Cheng, J.; Zhang, M.; Tang, J.; Kong, H. Emergence Quantitative Analysis of Complex Adaptive Systems Based on Shannon’s Information Entropy. J. Inf. Eng. Univ. 2014, 15, 270–274. [Google Scholar]
- Qu, Q.; He, X.; Lu, W. Emergence measurement of complex systems based on f-divergence. J. Acad. Armored Force Eng. 2017, 31, 106–110. [Google Scholar]
- Sheng, Z. Probability and Statistics, 3rd ed.; Higher Education Press: Beijing, China, 2001; Chapter 5. [Google Scholar]
- Hopcroftj, E.; Tarjan, R.E. Dividing a Graph into Triconnected Components. SIAM J. Comput. 1973, 2, 135–158. [Google Scholar] [CrossRef]
- Zhu, G.; Wei, G.; Pan, X.; Deng, X. Effects Research of Typical Communication Radio Radiated by Intraband Interference. J. Microw. 2011, 6, 93–96. [Google Scholar]
- Li, X.; Hao, X.; Han, H.; Zeng, Y.; Wang, L. Electromagnetic Interference Effect Research of Communication System Based on SER. J. Microw. 2017, 33, 71–76. [Google Scholar]
- Goldsmith, A. Wireless Communication; Posts Telecom Press: Beijing, China, 2007; pp. 35–36. [Google Scholar]
- Weng, Y.; Nan, D.; Wang, N.; Liu, Z.; Guan, Z. Compound robust tracking control of disturbed quadrotor unmanned aerial vehicles: A data-driven cascade control approach. Trans. Inst. Meas. Control. 2022, 44, 941–951. [Google Scholar] [CrossRef]
- Nan, D.; Weng, Y.; Wang, N. Data-driven robust PID control of unknown USVs. In Proceedings of the 2020 International Conference on System Science and Engineering (ICSSE), Kagawa, Japan, 31 August–3 September 2020. [Google Scholar]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Bai, Y.; He, K. On Countermeasures against Cooperative Fly of UAV Swarms. Drones 2023, 7, 172. https://doi.org/10.3390/drones7030172
Zhang X, Bai Y, He K. On Countermeasures against Cooperative Fly of UAV Swarms. Drones. 2023; 7(3):172. https://doi.org/10.3390/drones7030172
Chicago/Turabian StyleZhang, Xia, Yijie Bai, and Kai He. 2023. "On Countermeasures against Cooperative Fly of UAV Swarms" Drones 7, no. 3: 172. https://doi.org/10.3390/drones7030172