1. Introduction
Before the launch of any spacecraft mission, all of its systems go through a series of laboratory tests to confirm their performance. In particular, motion control systems are tested in a laboratory facility using aerodynamic suspensions, which makes it possible to simulate the conditions of orbital flight in some ways. There are two common types of aerodynamic test bed: a three-axis motion simulation for attitude, and a translational motion simulation for planar movement. A planar air-bearing test bed allows the performance of a number of tests regarding relative motion control algorithms in satellite formation flying missions [
1], and is also used to study the docking performance of different capturing systems including robotic manipulators [
2]. Some mock-ups are able to move in five degrees of freedom as in [
3], but most provide imitation of only three degrees of freedom relative to attitude and translational motion. Nevertheless, the simplified planar translational and single-axis attitude motion of satellite mock-ups helps developers to reveal the main algorithm features of implementation in hardware that are not evident during the numerical simulation of the controlled motion [
4,
5,
6].
Cold-gas thrusters can be utilized for satellite relative motion control in orbit. During laboratory experiments on the planar air-bearing test bed, such a control system can be used as it is (as in [
5,
7,
8]), although the magnitude of the thrust in the condition of the Earth’s atmosphere condition is different. Moreover, the onboard tanks with compressed gas require safety conditions in the laboratory that could be difficult to organize in some cases, especially if the laboratory facility is intended for educational purposes. Another approach is to imitate the thrusters by actuators based on the ventilators of an unmanned aerial vehicle, as in [
9]. It is quite clear that the ventilator cannot work in orbit, but it provides the corresponding value thrust to the cold-gas thrusters. Simplified versions of the control algorithm for the planar motion case can be tested by using UAV mock-ups with such thruster imitators.
The important problem of space debris in near-Earth orbits requires the development of special missions for active space debris object removal. The current state-of-the art developments in this field are presented in reviews [
10,
11]. One of the approaches implies the use of microsatellites capable of capturing a space debris object and changing its orbit by using onboard propulsion. There are a number of such missions, such as RemoveDEBRIS that used a net and a harpoon to capture an object [
12], ESA CleanSpace mission also considered a harpoon to catch a debris object [
13], and e.Deorbit mission used a robotic arm to grasp the launch adapter ring of the ENVISAT, which was considered debris [
14]. Some elements of close proximity operations for an active space debris removal mission can be tested in the laboratory environment. A docking control algorithm for a satellite with flexible appendages was tested in [
6]. In [
4], a path planning method of a robotic arm was verified at an air-bearing test bed. Visual relative navigation algorithms were experimentally studied in [
15,
16].
This paper is devoted to the experimental study of two control algorithms for close-range approach to the defined point of a non-cooperative space debris object. The algorithms were based on the State Dependent Riccati Equation (SDRE) and a method based on virtual potentials. The equations of relative motion were nonlinear. The equations of motion were linearized near the current state vector to implement SDRE control [
17,
18,
19]. Papers [
20,
21] presented a comparative study between SDRE and LQR based algorithms, and the SDRE based algorithm showed its advantages in terms of fuel consumption, approach time and trajectory accuracy. Algorithms based on SDRE have been used to solve various problems such as position and attitude control of a single spacecraft [
22], or the relative motion control for formation flying of satellites [
20]. For the problem of capturing a space debris object, it is necessary to take into account the effect of kinematic coupling, when the relative motion is considered not only as the motion of centers of mass of two bodies, but as the motion between two specific points fixed in the body reference frames, as considered in [
23]. In [
24], the application of control, based on SDRE for this type of relative motion equations, was investigated. In [
1], the influence of the parameters of the control system on the execution of the control algorithm based on SDRE of the relative motion during capturing was studied, taking into account the saturation of the reaction wheels and the deviation of the thrust vector from the center of mass of the satellite.
The method of virtual potentials is effective in solving the problems of nonlinear control. To control a dynamical system using this method, it is necessary to construct a virtual potential field. The control actions are based on the vector fields obtained as a gradient of an artificial potential function. Such a field can be selected using various mathematical functions. For example, one of the types of potential functions was proposed in [
25] in the form of an inverse-square function, which was applied to control the motion of a mobile robot. The virtual potential field can be constructed using harmonic functions and Laplace equations [
26,
27], artificial gyroscopic forces [
28], flow functions from hydrodynamics [
29], or using exponential series [
30,
31,
32]. The method of virtual potential fields is used in physics, chemistry and biology [
30], and in other areas. This method has been effectively applied for robotic control, for example, for traffic control problems for vehicles [
32], cylindrical robots [
33], unmanned aerial vehicles [
34,
35,
36,
37], and unmanned ground vehicles. Thus, artificial potential fields are widely used to control various dynamical systems.
The structure of this paper is as follows. In
Section 2, a laboratory facility description is provided and its architecture is described. In
Section 3, a short problem statement and the motion equations are presented. In
Section 4, the description of the control algorithms and their simplification for laboratory testing is provided. In
Section 5, the results of the experiments and algorithms comparison are presented.
2. Laboratory Facility Description
The laboratory facility COSMOS was developed by SputniX Ltd. for the Keldysh Institute of Applied Mathematics (KIAM), of the Russian Academy of Sciences. Its main parts are presented in
Figure 1. An air duct was located under the table surface, and excessive atmospheric air pressure was created using the industrial ventilator. The air flowed through the holes on the table surface, thus, creating an air cushion under the flat base of the mock-ups. The table surface consisted of two aluminum plates. The size of the table was 1.5 by 2 m. The mass of the test bed was about 200 kg.
The main advantage of such an aerodynamic test bed is that it provides the air cushion by itself. It is more convenient compared with other types of test beds with solid flat surfaces, where the air cushion must be produced by satellite mock-ups. However, the “air hockey”-like test beds are characterized by additional disturbances due to non-uniform airflow through the holes in the surface.
Satellites mock-ups were placed on the aerodynamic table, and
Figure 1 shows two types of mock-ups. The mock-up control system was constructed using the hardware of the OrbiCraft constructor, developed by the SputniX company [
38]. The satellite mock-up mass was 6 kg. The mock-ups consisted of the following systems:
On-board computer Raspberry PI B+;
Power system including the battery and PCU;
Command transmitting system;
A set of sensors for motion determination;
Control actuators: one-axis reaction wheel, and four ventilators for thruster imitation;
Passive magnetic docking system;
Wi-Fi module.
The flowchart of all hardware component interactions is presented in
Figure 2.
On the top of the mock-ups, ArUco markers [
39] were placed for motion determination. Images from the observation camera above the table were processed for the mock-ups’ centers of mass and attitude angle estimation. A desktop computer provided general experiment management, processed the observing camera images, transmitted the position measurements to the mock-ups, and logged the experiment data. Those data were transmitted to the mock-ups’ onboard computers via Wi-Fi, and the measurements were processed by Kalman filter for the estimation of linear and angular velocity. Current state vectors were used for the reference trajectory calculation for each mock-up. The control commands for actuators were calculated according to the goal of the current task, taking into account the disturbances acting on the mock-ups. The common control block-scheme is presented in
Figure 3.
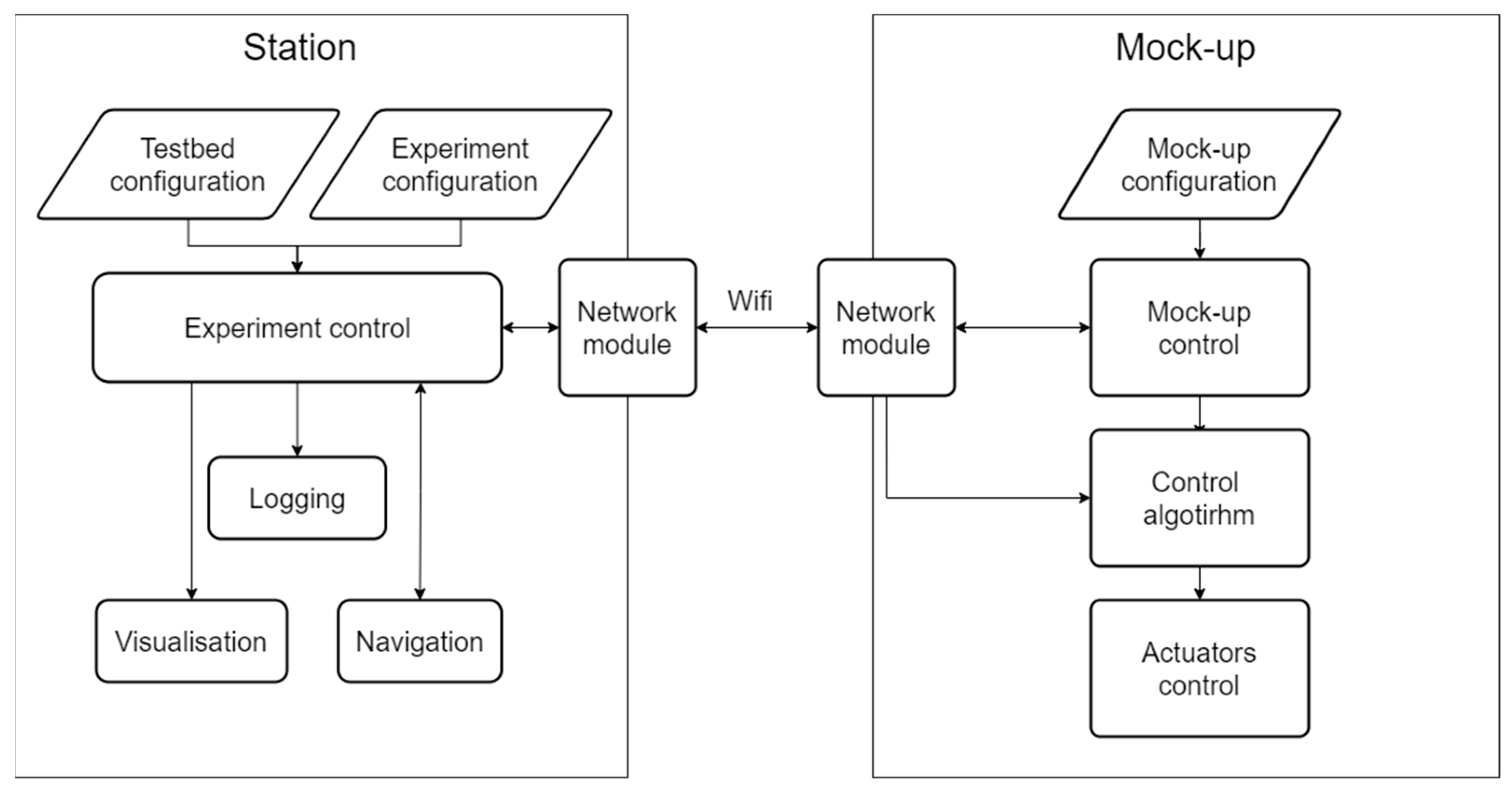
A special software was developed to run the required experiments in the laboratory facility. Its architecture allowed the addition of new blocks in the available experiment library, which met the testing experiment requirements. The software system consisted of a desktop program “
Station”, and “
Sat” programs which were executed by the mock-ups’ onboard computers. The experiment and test bed configurations were set by the input parameters from the config-file, the
Station program connected to the
Sat programs via
Wi-Fi, and the
Sat programs were initialized by the parameters from the experiment configuration. The
Sat programs were launched by the
bash-script from the desktop PC which then waited for connection to the
Station program. The
Station program was able to start and finish the experiment on the
Sat program after successful connection. A general block-scheme of the
Station–
Sat interaction is presented in
Figure 4.
In the next section, we consider the mock-up motion model used in the control algorithms for the problem of docking to the space-debris object.
5. Results of the Laboratory Experiments
Due to the difference between the motion of the mock-ups along the surface and the satellite orbital motion, and due to the difference in the characteristics of the actuators, it is almost impossible to study real satellite control algorithm performance such as accuracy and time of docking. Nevertheless, the laboratory experiments revealed some features of the proposed algorithm scheme, and estimations on the range of algorithm parameters which provide successful docking.
During the experiments, the space debris mock-up tracked the defined trajectory along the test bed surface imitating free orbital motion on a circular orbit. The trajectory is described by the following:
where
are coordinates of the center of the orbit circle,
is the radius of the orbit,
is the angular velocity,
is the initial phase angle,
is the constant angular velocity of the debris mock-up rotation around vertical, and
is the initial attitude angle of the mock-up. During the experiments, the following parameters were used:
The initial conditions for the translational and angular motion of the mock-ups were determined randomly, although the initial distance between the mock-ups was about 1 m. The algorithm control parameters are presented in
Table 1.
For safety reasons, when the satellite mock-up approached the debris mock-up in a manner not acceptable for docking conditions, the collision avoidance control was applied to the satellite mock-up. The dangerous distance was set in the experiments as 0.5 m. The collision avoidance control was applied in the direction along the radius vector from the debris mock-up center of mass to the satellite mock-up center of mass, with the aim of increasing the relative distance and avoiding dangerous proximity.
5.1. Virtual Potentials-based Control
Virtual potentials-based control provided the satellite mock-up trajectory with constant distance relative to the space debris mock-up, and the magnetic capturing mechanism of the satellite mock-up was oriented towards the debris mock-up center of mass. When the satellite mock-up entered the acceptable area for capturing, the parameters of the virtual potentials were replaced by another set, allowing the capturing system to approach the capturing point at the debris mock-up. The scheme of the experiment with algorithm implementation is shown in
Figure 9.
Before the execution of the main part of the algorithm, all the parameters were initialized according to the experiment configuration obtained from the Station software. This included initialization of the motion equations parameters, Kalman filter parameters, and virtual potentials parameters; and all the initially obtained measurements were linked to the corresponding mock-ups. In the case that the initialization was performed and a new set of measurements was obtained, the algorithm main loop began to execute. Relative motion parameters were estimated by the onboard Kalman filter, and the current trajectory was calculated. The control was calculated according to the virtual potentials. If the docking conditions were not satisfied, the calculated control was implemented by the actuators. Otherwise, the experiment was over, as the docking was successful. If the algorithm failed to provide the docking, the mail loop was interrupted manually.
An example of the experiment results may be considered, and the video of the conducted experiment can be accessed in [
41].
Figure 10 presents the satellite and debris mock-ups’ center of masses trajectories in the table-fixed reference frame. The initial position of the satellite mock-up, equilibrium distance and docking point are shown. The relative distance time–history plot is presented in
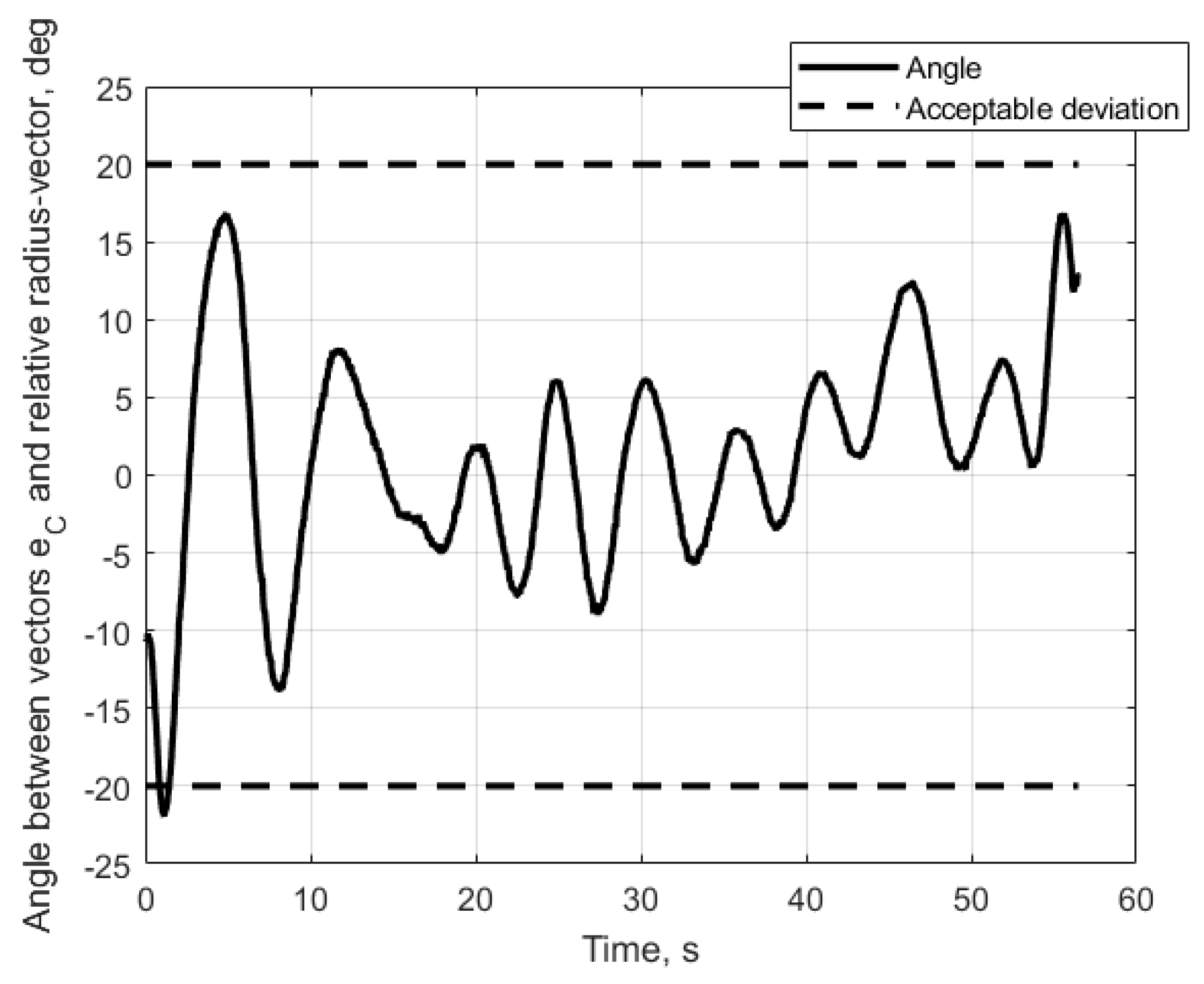
Figure 11. The equilibrium distance in this experiment was set at 0.81 m. At about 53 s after the start of the experiment, the satellite mock-up entered the acceptable capturing area, and the virtual potentials was replaced by another set to provide the mock-up approaching the capturing point. The control provided the tracking of the unit vector of the capturing system direction
and the radius vector from the satellite mock-up center of mass to the debris center of mass, and the angle between these two vectors is presented in
Figure 12. This angle was inside the acceptable area during the time of the whole experiment due to the control implementation.
The calculated translational control acceleration according to the virtual potentials in (38) is presented in
Figure 13. After the convergence to the equilibrium distance, the values of the control were low, and it compensated the disturbance forces acting on the satellite mock-up center of mass. At the point of entering the acceptable area, the values of the control became higher to provide the approach to the capturing point of the debris mock-up. In
Figure 14, the angular control acceleration is presented, which is aimed at tracking the debris mock-up’s center of mass by the direction of the capturing system. Note that the values of the angular control exhibited similar behavior as the deviation angle in
Figure 12. This was due to the fact that the control aim was to set the angle to zero, while the disturbance torque caused some oscillations in this vicinity. The calculated translational and angular control was converted into the control commands of the thrusters; its values are provided in
Figure 15. Note that according to the ventilators control implementation algorithm [
16], at each instant, only three of the four ventilators were controlled.
Figure 16 presents the angle of deviation between two unit vectors directed to the capturing system position
and the opposite vector of the capturing point of the space debris
. This angle represents the capturing conditions for the relative vector
explained in (17). It can be seen that due to the debris rotation, the value of this angle crossed the boundaries of acceptable error for docking. The acceptable area for docking capture is also defined by the angle between the unit vector
and the satellite mock-up radius vector in the debris body reference frame, as presented in
Figure 17.
Thus, this experiment example demonstrated the proposed control scheme application for the mock-ups’ rendezvous problem.
5.2. SDRE-based Control
A further experiment demonstrated the application of the proposed SDRE-based control. The video of the experiment is presented in [
42]. The main difference of the control scheme was that the satellite mock-up aimed to achieve the center of mass and angular position required for docking, instead of waiting for the acceptable conditions at the equilibrium distance as in the case of virtual potentials-based control. The scheme of the experiment with SDRE-based algorithm implementation is shown in
Figure 18.
Before the execution of the main part of the algorithm, all the parameters were initialized according to experiment configuration obtained from the Station software. This procedure was similar to the one from the virtual potentials control algorithm. If the initialization was performed, and a new set of measurements was obtained, the algorithm main loop began to execute. Relative motion parameters were estimated by the onboard Kalman filter. If the mock-up docking conditions were not satisfied, and there was no dangerous proximity between the satellite and debris mock-ups, the SDRE-based control was calculated and implemented by the thrusters’ imitators. If the required relative position according to the SDRE algorithm was achieved, the satellite mock-up slowly approached the debris mock-up until the docking was successful. If the satellite mock-up was closer to the debris mock-up than the dangerous distance, and it was out of the docking sector, the collision avoidance control was applied in order to increase the relative distance. If the docking conditions were satisfied, the algorithm was switched to the joint trajectory motion mode, and it jointly stabilized the current position and attitude of both mock-ups. In the case that the algorithm failed to achieve docking, the main loop was interrupted manually.
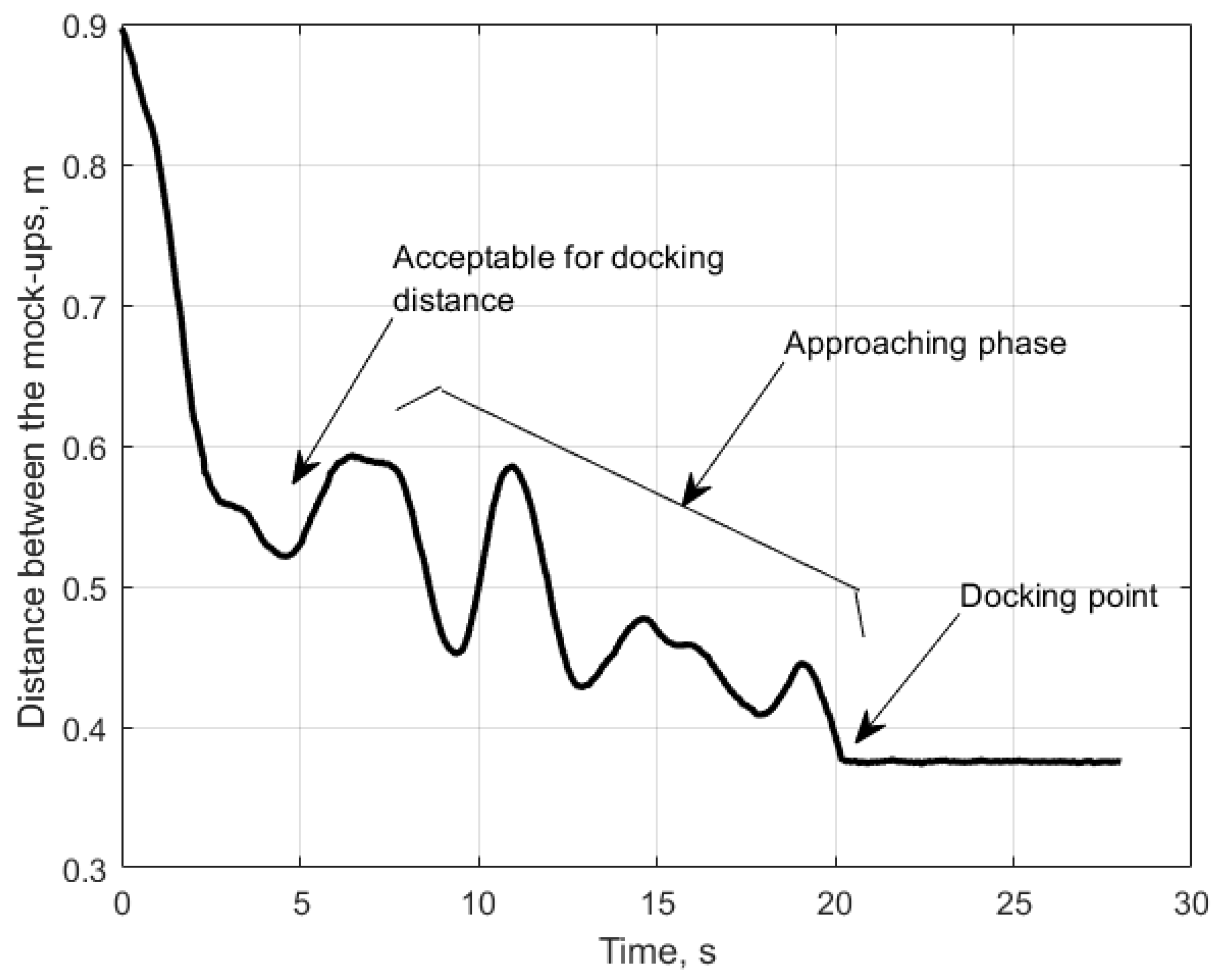
Figure 19 presents the trajectories of the satellite and debris mock-ups in the aerodynamic table-fixed reference frame. The initial position and the achieved acceptable position for docking are shown in the plot. After the achievement of the required relative center of mass position and attitude, the approaching phase followed. During the approach, the required relative radius vector
length was slowly reduced until docking was achieved. The relative distance between the centers of masses of the mock-ups is presented in
Figure 20. Due to the disturbances acting on the mock-ups and control implementation errors, the relative distance during the approaching phase reduced with some oscillations, although with linear trend, that led to the docking point.
Figure 21 demonstrates the angle between the unit vectors directed to the capturing system position
and to the capture point of the space debris
during SDRE-based control. It can be seen that the attitude acceptable for docking was almost achieved after 3 s, although the error periodically exceeded the limit value. The angle between the unit vector
and the satellite mock-up radius vector in the debris body reference frame is shown in
Figure 22.
5.3. Control Algorithms Experimental Study
The performance of the proposed control algorithms depended on a set of parameters. One of the most influential parameters was the angular velocity of the debris mock-up. A set of experiments with almost the same initial conditions for the satellite mock-up but with a different value of angular velocity of the debris mock-up was carried out. The results of the experiments were analyzed, the required
for docking was calculated as the integral of the control acceleration components, and the docking time between the experiment start and successful docking was estimated. The results of the experiments are presented in
Table 2. It was concluded that at an angular velocity lower than 12 deg/s, both algorithms successfully achieved docking, although at a value of 18 deg/s both algorithms failed to dock with the debris mock-up for different reasons.
In the case of successful docking with the same debris mock-up angular velocity, the virtual potential-based control required a lower value of . The docking time was higher compared with the SDRE-based control because the virtual potential-based control simply waited for the acceptable relative position for docking, while the SDRE-based control sought to actively achieve this condition. The required for the virtual potential-based control was similar due to the low on the “waiting” distance, and differed for the SDRE-based control due to different active controlled motion time while achieving conditions acceptable for docking.
Examples of experiments with high angular velocity of the debris mock-up, when the algorithms failed to achieve docking, may be considered.
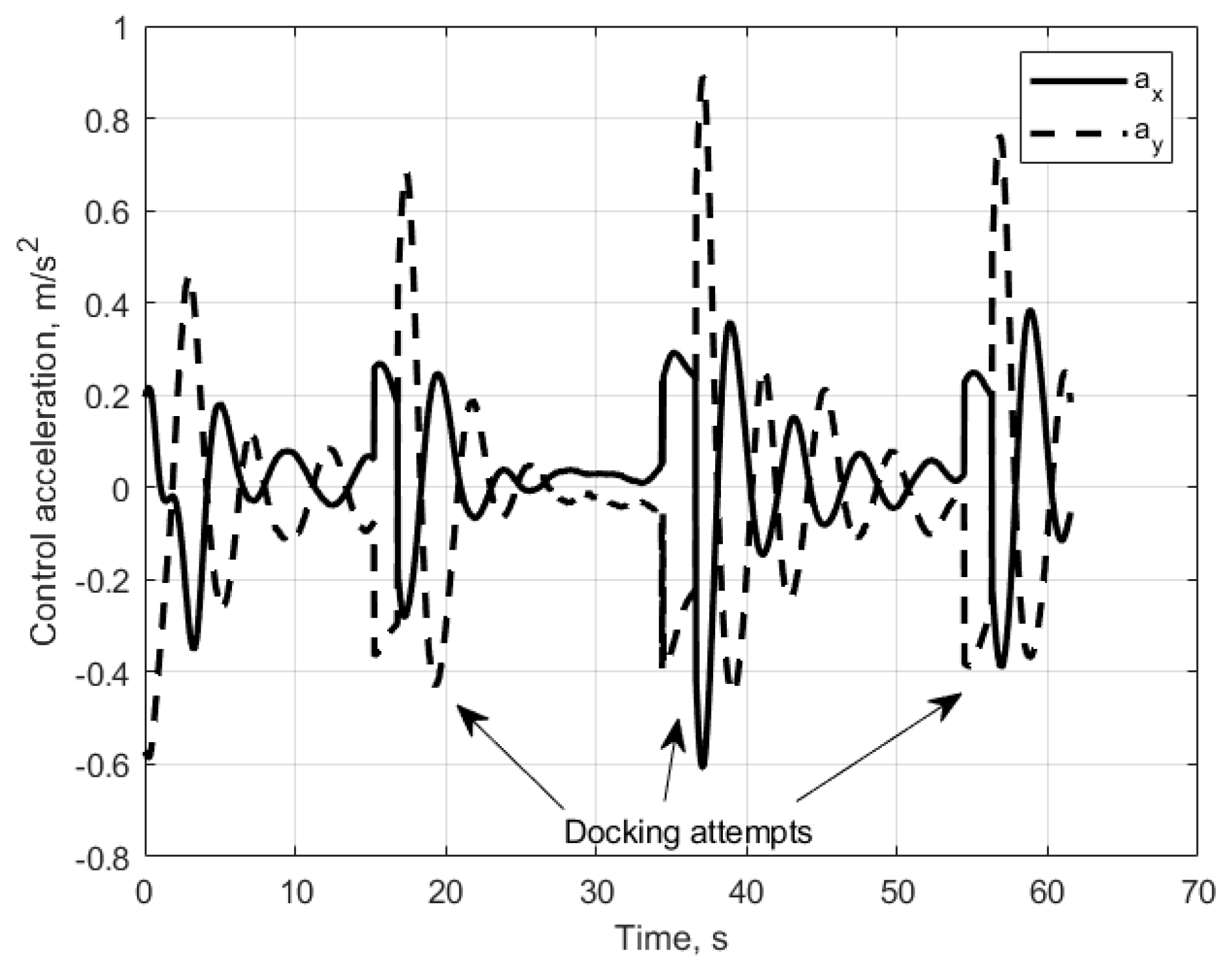
Figure 23 shows the relative distance of the mock-ups’ centers of masses during a fast debris rotation experiment with virtual potentials-based control. The satellite mock-up tried to dock three times during the experiment, but the time interval during which the docking area sector faced the docking satellite was too small to accomplish docking, as can be seen from
Figure 24 and
Figure 25. This time interval was about 2 s, the satellite mock-up center of mass approached the debris mock-up during this time. However, as the debris rotated, the docking satellite left the acceptable area and the virtual potentials parameters were switched back to obtain the equilibrium distance of 0.8 m. The control acceleration components are shown in
Figure 26, where the peaks at the moments of entering and leaving the area of conditions acceptable for docking can be observed.
The case of SDRE-based control during the fast debris mock-up rotation experiment is presented in
Figure 27,
Figure 28,
Figure 29 and
Figure 30. This experiment also did not achieve docking. As can be seen from
Figure 27 and
Figure 28, the satellite mock-up entered a dangerous distance twice, that resulted in a collision avoidance control application (see
Figure 30). The experiment was stopped after 15 s due to the fact that the satellite mock-up failed to move to the area acceptable for docking because of the fast debris rotation.
Thus, the laboratory experiments showed the performance of the proposed algorithms and revealed their features using mock-up control systems. At high debris mock-up angular velocity, both algorithms were not able to achieve docking. At very low angular velocity, the virtual potential-based control waited for a considerable amount of time for the achievement of allowable docking conditions. In the case of orbital motion, the probability of entering the docking area may be low, depending on the debris angular velocity vector. The SDRE-based control required higher values of , and could have led to a dangerous proximity, that required collision avoidance application.
6. Conclusions
Two algorithms for active satellite motion control relative to space debris were proposed to achieve successful docking, and were experimentally studied in this paper. The performance of the controlled motion of a satellite mock-up on the aerodynamic test bed is not the same as the performance of an orbital controlled motion, although the laboratory study allowed testing of the whole control logic, and revealed control scheme features such as principal dependence of the required and docking time on the debris mock-up angular velocity. As a result of this study, the two control algorithms can be recommended for onboard implementation in real active space debris removal missions with restrictions on the acceptable angular velocity of a space debris object for successful docking.
This work demonstrates that the different control approaches in space debris removal can be experimentally tested using the considered laboratory facility. Other types of control algorithms such as optimal control, model-predictive control, or some others, can also be adapted for mock-up application, and their performance can be tested. One of the directions for algorithm improvement will be to take into account the particular docking system features in the laboratory. The authors are planning to implement an autonomous visual-based navigation, test its performance, and estimate its influence on features of mock-up-controlled motion.



































{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}