1. Introduction
Unmanned aerial vehicles (UAVs) are known for their small size, easy operation, and flexibility. In recent years, UAV technology has continued to develop rapidly and has been utilized extensively in both military and civil fields [
1,
2]. The development of UAVs brings risks and hidden dangers at the same time. At present, nearly all of the leading countries in the world have had UAV “black flight” occurrence, which not only affects people’s lives and property safety, but also threatens the public safety and even air defense safety [
3,
4]. Owing to the risks of UAVs, it is now a primary priority for military and security organizations worldwide to efficiently and low-costly control unlawfully flying UAVs [
5].
With the advancement of big data technology, collecting historical data of UAVs and then obtaining the behavior characteristics of UAVs has become a key exploration area. Therefore, this paper focuses on a UAV behavior prediction method to get real-time position data of UAVs. These data can help security agencies identify UAVs’ illegal behaviors and perform respective actions on time. Since there is no usable historical data for most of the trajectory prediction of illegal UAVs, this paper mainly discusses the passive localization method for mobile signals.
Passive localization is also called non-cooperative localization. The receiver in the localization system passively receives the target signal rather than actively radiating electromagnetic waves. After processing the received signal, the system gets the position estimation results to monitor, locate, and track target signals [
6,
7]. Compared with active localization, passive localization has superiority in concealment, battlefield viability, mobility, and cost. Passive localization can be divided into single-station localization and multi-station localization depending on the number of receivers in the system. The passive localization technology based on a single receiver requires repeated measurements to obtain sufficient parameter information, which makes it highly complex and unsuitable for variable UAV trajectory tracking. With information fusion further developed, multi-station passive localization has become a research hotspot with a wider detection range, higher system robustness, and superior performance [
8]. The proposed method in this paper deploys multiple time-synchronized base stations to track the mobile signals and transmit the measurement results to a data center for information fusion via the network.
The common multi-station passive localization mechanisms include angle of arrival (AOA) [
9,
10], time of arrival (TOA) [
8,
11], time difference of arrival (TDOA) [
12,
13], frequency difference of arrival (FDOA) [
14], and received signal strength (RSS) [
15,
16]. Various multi-station passive localization schemes using different mechanisms are given in [
8,
9,
10,
11,
12,
13,
14,
15,
16]. The AOA-based scheme [
9,
10] collects the angle of arrival of the signal and does not require synchronization between base stations or data fusion. However, the receiver must have a directional antenna array, and it is unsuitable for accurate tracking of far-field transmitters such as UAVs. In the TOA-based localization scheme [
8,
11], the station measures the time of arrival of the signal. Although the TOA-based scheme is simple to operate and has good positioning accuracy, this scheme requires strict time synchronization of stations, which is challenging to meet in practice. In the TDOA-based localization scheme [
12,
13], the system detects the time difference of arrival of the signal, which only needs to keep the time synchronization between stations. The TDOA-based scheme has high localization accuracy, whereas the computational complexity is higher. The FDOA-based scheme [
14] locates the target according to the Doppler frequency difference information generated by the mutual motion between the signal and the station. The RSS-based [
15] scheme uses the correlation between signal propagation distance and energy loss. Based on the signal transmission model, it converts the received signal intensity into distance characteristics. Compared to other localization schemes, the RSS-based scheme has the lowest complexity and cost. Nevertheless, the localization accuracy may be undesirable owing to the shadow effect and long distance between the signal and the BSs [
16].
The localization schemes mentioned above all estimate the parameters first, and then estimate the signal’s position depending on the results obtained, such as TDOA. However, the final estimation results are not assured to be optimal, particularly for the parameter estimation step. In [
17], Xia et al. combined the particle filtering with the cyclic cross-spectrum for mobile co-channel signals to realize direct tracking. The experimental results show that the spectral function has a peak at the real signal position, demonstrating that the spatial spectrum is useful in signal localization. Considering the performance and computational complexity, we connect the localization method and the spatial spectrum to estimate the mobile signal’s position directly. The spatial spectrum and mobile signal position have a highly non-linear relationship in the Cartesian coordinates. Some improved Kalman filters are typically used to address the non-linear equations [
18,
19,
20]. Extended Kalman filter (EKF) [
18] is a recursive minimum mean square error estimation method. The method expands the nonlinear measurement equation with the Taylor formula to obtain the first-order linearization result. Therefore, the algorithm suffers from the error caused by linearization. The unscented Kalman filter (UKF) [
19] utilizes the unscented transform algorithm, which can achieve higher accuracy, whereas the algorithm mode will be constrained by the Gaussian model. In [
20], the centralized measurement fusion UKF (WMF-UKF) method is proposed, which is a universal weighted measurement fusion method. This method has a lower cost but also has linear error. Another popular estimation method for non-linear problems is the particle filter (PF) [
21,
22,
23], which is based on a Bayesian framework. PF uses each particle and its corresponding weights to approximate the probability density function (PDF) of the target’s state at each moment and then updates the particle weights by the observed values to realize the tracking of the signal. Unfortunately, the introduction of resampling leads to the problem of particle degradation and particle scarcity. Liu in [
24] proposed an adaptive Markov chain particle filtering algorithm, which discards the resampling and makes the particles converge faster, reduces the number of iterations, and obtains high accuracy in mobile source localization. Although the improved particle filter methods address the particle scarcity caused by resampling, they inevitably suffer from high computational complexity. Therefore, how to reduce the computational complexity of the algorithm while ensuring accurate mobile signal tracking is a topic worthy of study.
Compressed sensing is an effective technique to reduce running time and computational complexity [
25,
26]. In this paper, the compressed sensing uses random sampling to obtain discrete samples of the signal, discards the redundant information in the current signal sampling, and directly reconstructs the spatial spectrum function of the signal. It effectively reduces the redundancy of parameters, storage occupation, and computational complexity.
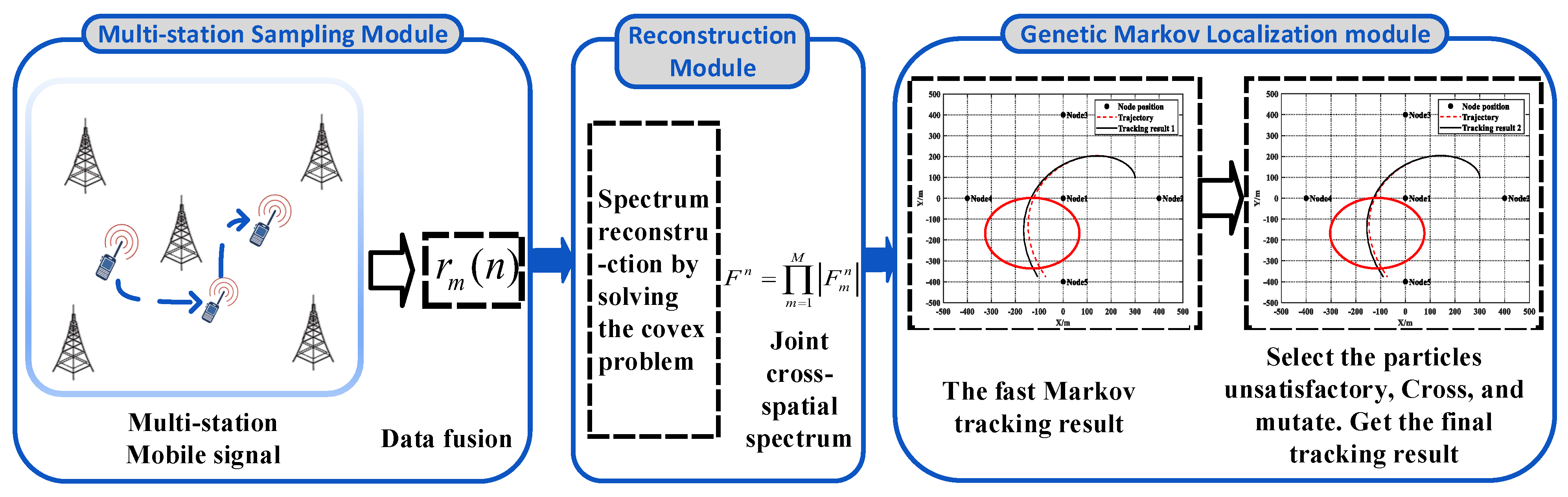
To summarize, a compressed sensing-based genetic Markov localization method is proposed for mobile transmitters in this paper. The re-sampling is not needed and therefore the particle degradation or depletion are nonexistent. Compared with other methods, the proposed method discards the redundant information and can achieve higher localization accuracy. The proposed method has three modules: the multi-station sampling module, the reconstruction module, and the genetic Markov localization module. The multi-station sampling module is designed to compressively sample the mobile signal and fuse the data from multiple stations. Furthermore, the reconstruction module links the multi-station sampling module and the genetic Markov localization module. The main contributions of this paper are as follows.
We propose a compressed sensing-based localization method. After obtaining the signal data at a lower sampling rate, the cross joint spatial spectrum of the samples is recovered to directly estimate the position of the signal;
Compared with the traditional particle filtering method, we proposed a genetic Markov method, which is a new two-step method. The inaccurate points in the preliminary results are genetically corrected and finally fused to generate the localization result;
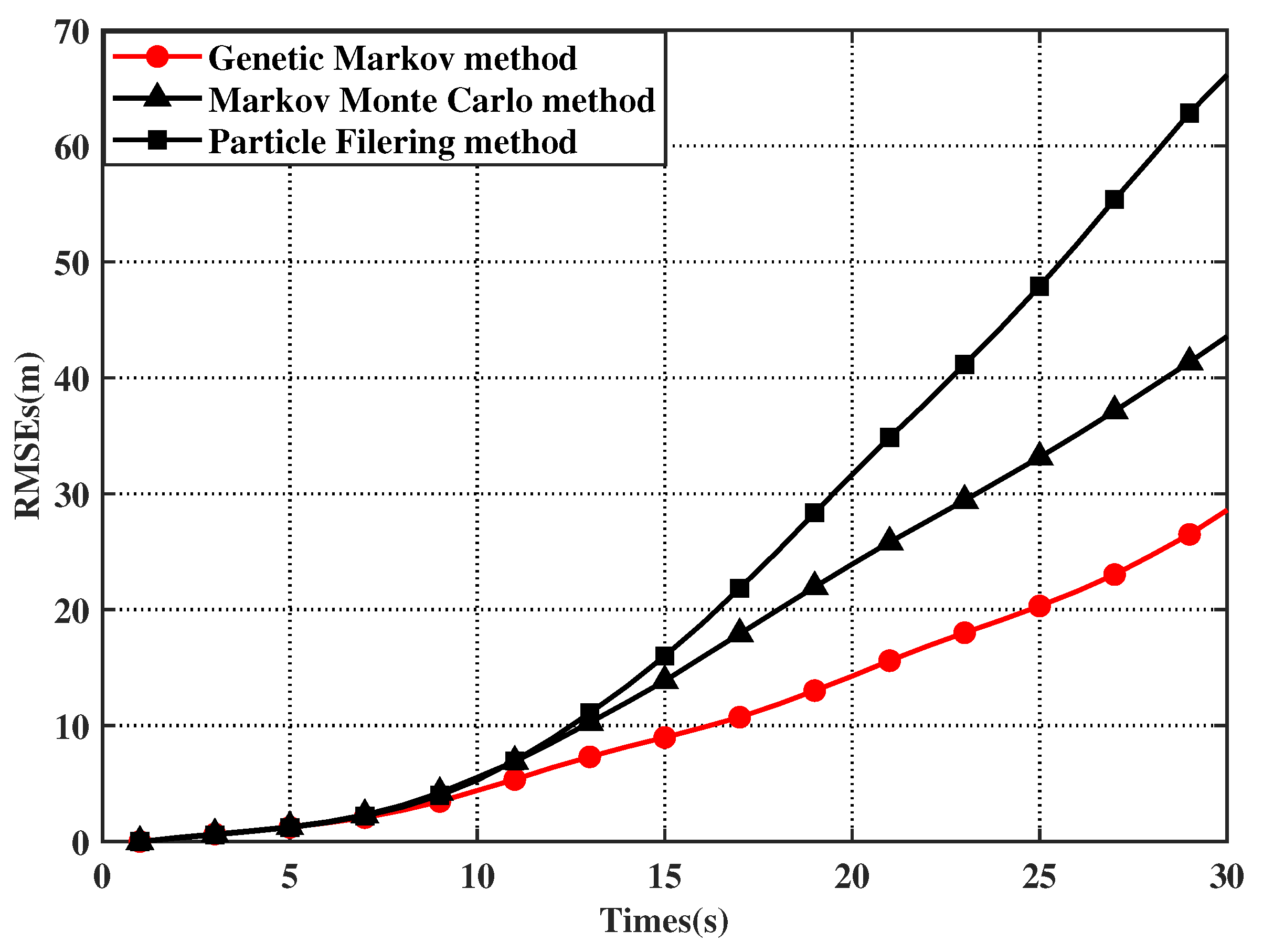
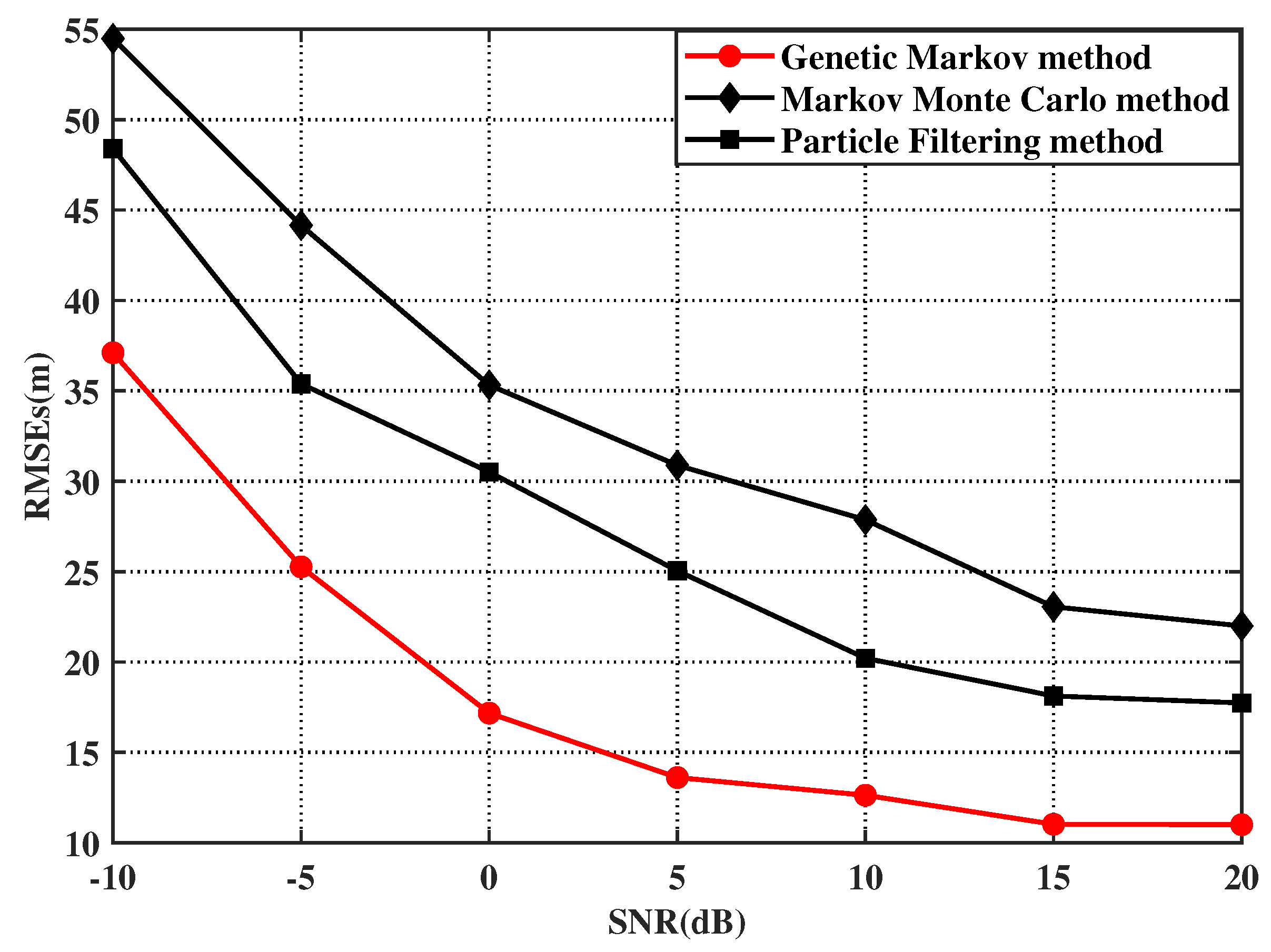
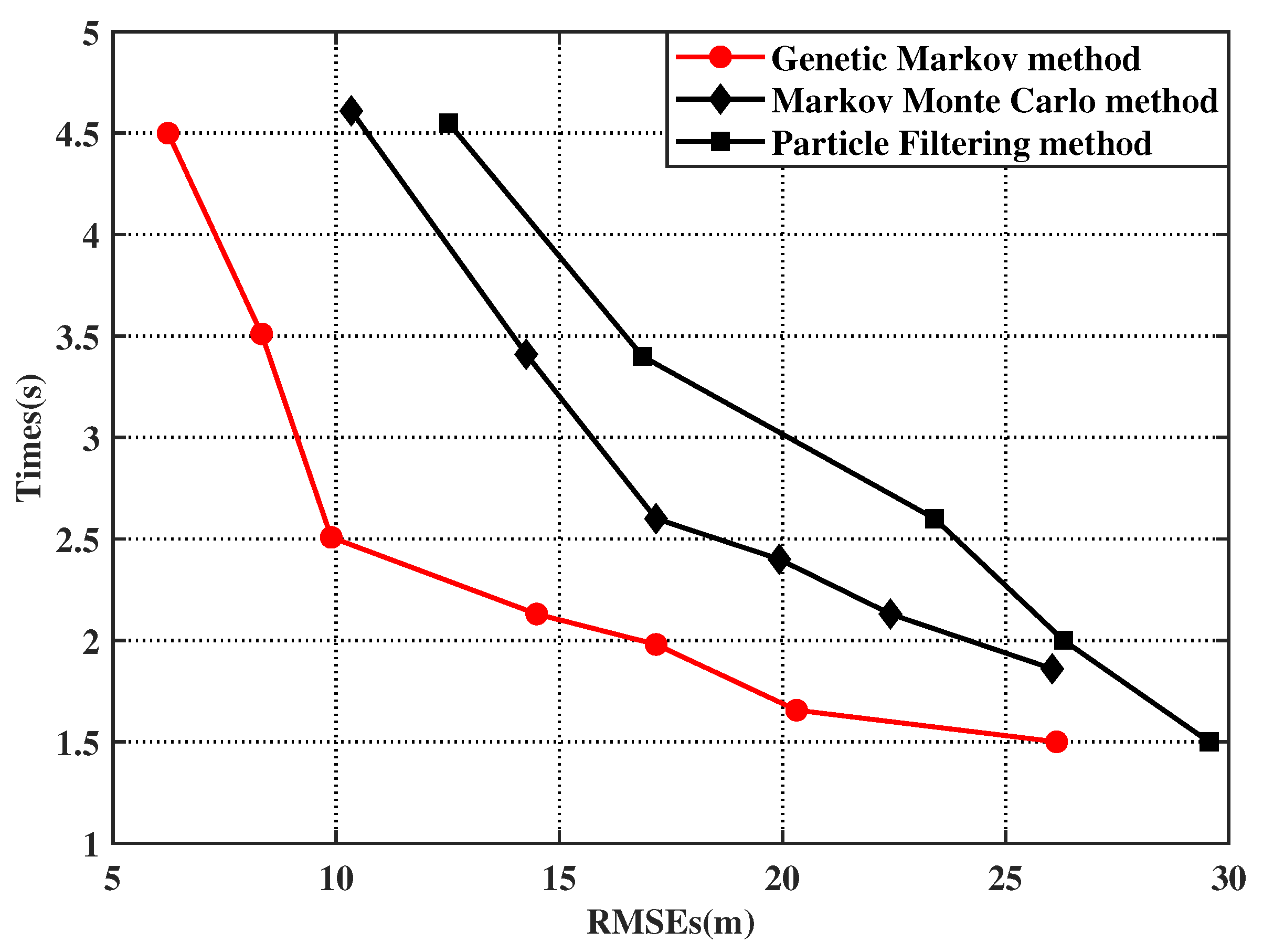
Extensive simulations verify that the proposed method is superior to the particle filter method and the Markov Monte Carlo method. Under the same experimental environment, the proposed method can achieve higher accuracy in a shorter time.
The rest of the paper is organized as follows.
Section 2 illustrates the system model and the proposed method framework.
Section 3 introduces the proposed compressed sensing-based genetic Markov method. Simulations are conducted in
Section 4.
Section 5 concludes the paper, discusses the limitations of the method, and gives the future research direction.
2. System Model
Figure 1 presents the proposed method framework in this paper, which can coarsely be divided into three parts: multi-station sampling module, reconstruction module, and genetic Markov localization module.
In the multi-station sampling module, the signal is gathered by
M scattered base stations (BSs) that are time-synchronized. The positions of BSs are fixed and described as
, where
. The symbol
represents the location of the reference BS. Make an assumption that each BS’s observations are independent of those of other BSs. After data fusion, the time-discrete signal at
m-th BS and
t-th snapshot can be modeled as:
denotes the total number of the signal symbols in a snapshot, where
is the sampling frequency,
represents the sampling sustained time and
denotes the rounding down operator. The symbol
represents the amplitude attenuation changed with snapshot
t. We assume that
is the measurement noise, which is modeled by additive white Gaussian noise (AWGN) with zero mean and variance
. Let
be the reference signal, and the sample delay between the
m-th BS and the reference is denoted by
. It can be expressed as
where
is the position vector of the moving transmitter and
c is the speed of the light.
denotes the Euclidean norm. The reference signal does not have a time delay. Namely,
.
Assume that the motion state of the mobile signal is modeled by CTRA model [
27]. The vector
represents the motion state of the mobile signal, which can be described as follows in two-dimensional Cartesian coordinate.
where
denotes the total number of snapshots, the symbols
a and
w represent constant acceleration and turn rate, respectively. The position elements
and
, the signal’s heading angle
, and the velocity
v can be obtained based on the following state transition of the CTRA model:
where
in which
denotes the sampling interval,
and
are velocity elements with the following expressions, respectively.
Assume that the vector is the process noise modeled by AWGN with zero mean and variance .
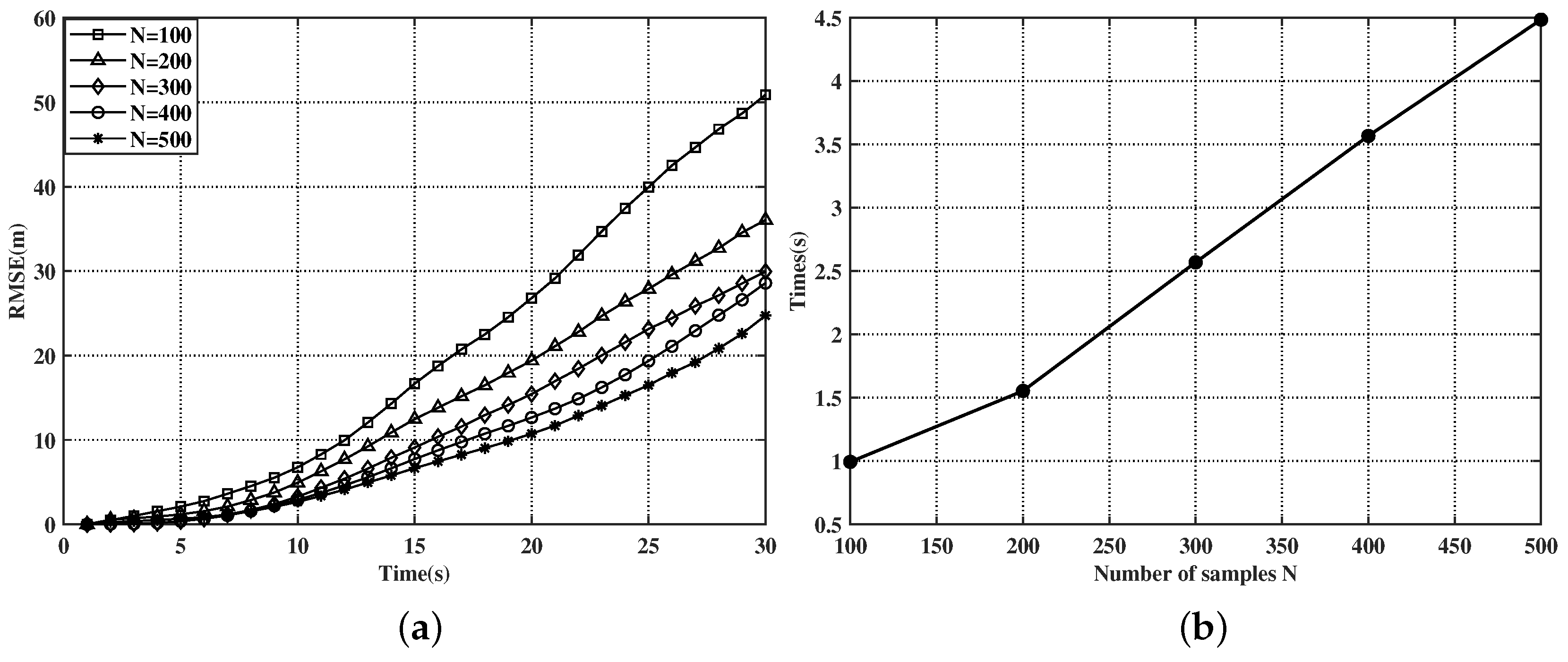
In the reconstruction module, we firstly initialize a set of random state particles from a given prior uniform distribution
where N denotes the total number of particles. The position particles are denoted by
, the TDOA particles
can be obtained via replacing
with
in Equation (
2). Then, the cross-spatial spectrum between the signals received by the
mth BSs
and the reference
can be expressed as
where
is the fast Fourier transform (FFT) of
. Based on the assumption that each BS’s observations are independent of those of other BSs, the joint cross-spatial spectrum of multiple BSs can be described as
In this paper, the system compressively samples the mobile signal, and the mathematical representation can be described as:
where
is an
vector,
is an
compressed sampling measurement vector, and
is an
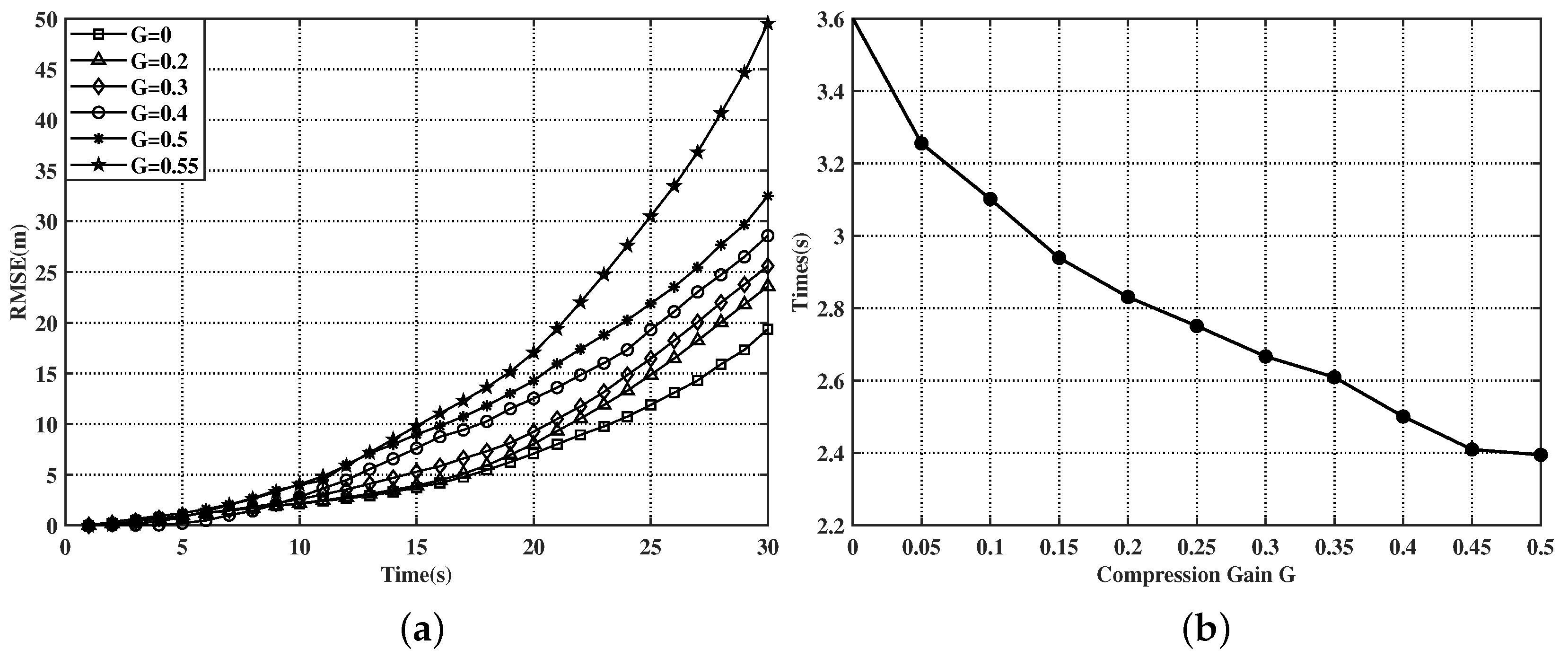
compressed sampling matrix. Defining the compression rate as
, and then the compression gain can be defined as:
Reconstructing signal
from
is generally an under-determined problem. The sparse solution can be obtained by solving
optimization problem
Reconstructing the joint cross-spatial spectrum is usually divided into two steps, first reconstructing the signal
x and then obtaining the spectral function according to Equation (
10). To further reduce the computational complexity, we reconstruct the spectral function directly from the compressed sampling signal. The FFT of
y can be expressed as
where
is the rotation factor. Combining Equation (
14) and Equation (
9), we get the result in Equation (
15), where
is the FFT of
x,
After the joint cross-spatial spectrum of the signal is reconstructed, the system puts it into the genetic Markov localization module.
3. Proposed Method
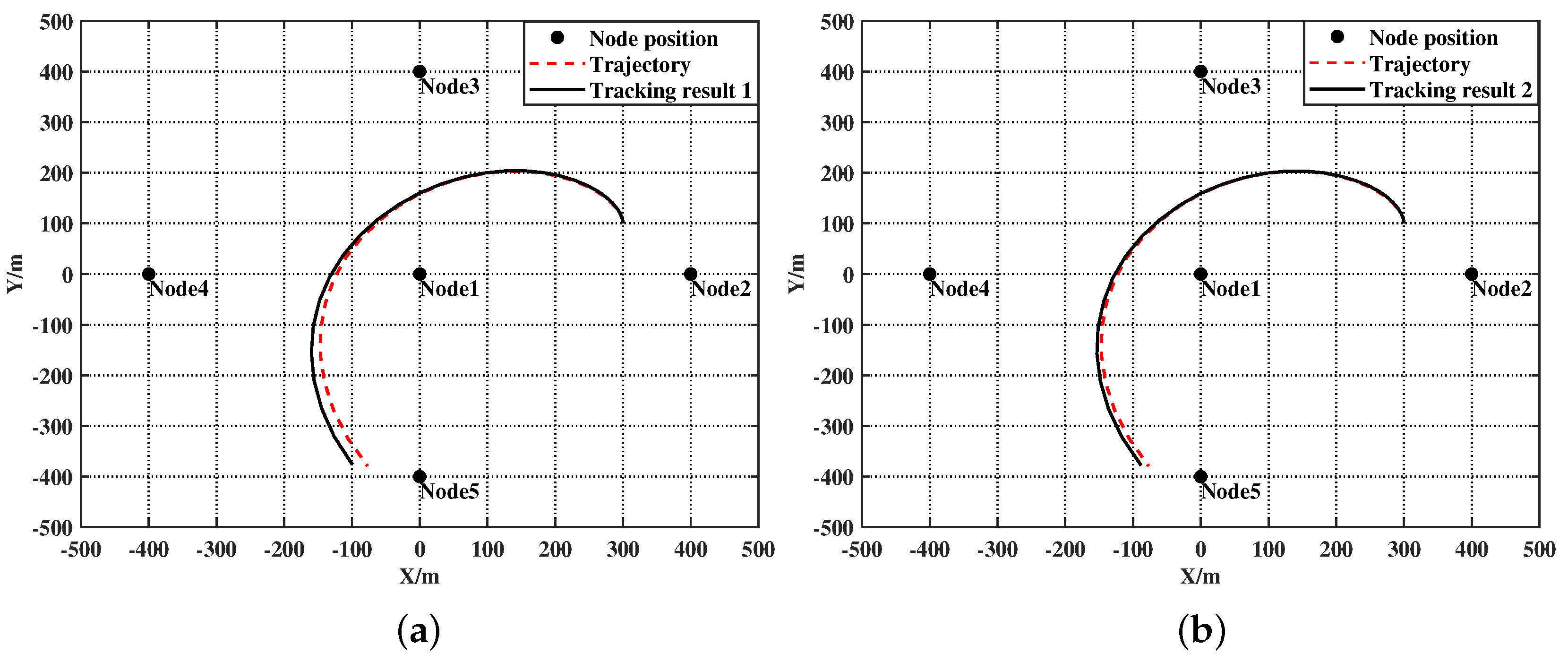
In this paper, we propose the genetic Markov method, which is a two-step localization scheme. The inaccurate points in the preliminary results are genetically corrected and finally fused to generate the localization result. The proposed method has superiority in localization performance and computational complexity. The scheme first performs a fast Markov Monte Carlo method, whose efficiency depends on the transfer kernel, namely, the proposed density function (PDF). An appropriate proposed density will cause the Markov chain to converge quickly independent of the initial state. In most cases, the proposed density is a combination of the prior distribution and the probability of the approximate posterior distribution at the previous moment. However, this approach may not approximate the true distribution well in practical situations. The fast Markov Monte Carlo method samples from a rather convolutional version of the propagated PDF, which is constructed using gaussian approximation, with the following main steps.
Picking the initial state particles of the signal
from the uniform distribution. The particle state at the next time
is obtained through Equation (
4).
Computing the sample statistics:
Updating the measurements. For
, picking a sample
uniformly at random from particle set
, select a factory randomly
, then get the updated value of the particle from the distribution
. Set
, computing the acceptance probability of the new candidate according to Equation (
19)
Generate a random number
. If the random number is less than the acceptance, the particle will be updated, namely
Otherwise, the update will not be accepted.
After the update process is completed, discard the first
M samples of the chain and compute the updated state estimation result
Next, for some inaccurate estimation results, we use the genetic method to correct them. It is a combination of the genetic method and the particle filtering, which introduces the selection, crossover, and mutation operations of the genetic method into particle filtering, and the specific implementation steps are as follows:
Select and calculate the weight variance of the particle set
at the moment
k to decide whether to optimize the result of this moment. For the results that need to be optimized, we divide the particles into two groups according to their weights. The group with a larger weight is retained and the group with a smaller weight is going to be crossed and mutated as follows.
where the threshold
is the particle weight corresponding to the effective particle number. Then cross all particles in the low-weight group.
where the symbol
is the cross coefficient, representing the amount of information transferred from the low-weight group to the crossed particles.
Mutate to obtain new particles, which can increase the particle diversity.
where
is the probability of variation and
is the randomly selected coefficient of variation. The results are finally fused to generate the optimized estimation results. The genetic method can effectively address the particle degradation problem in the particle filtering algorithm and correct the inaccurate estimation points in the preliminary results.










{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}