
Dual Observer Based Adaptive Controller for Hybrid Drones


Abstract
:1. Introduction
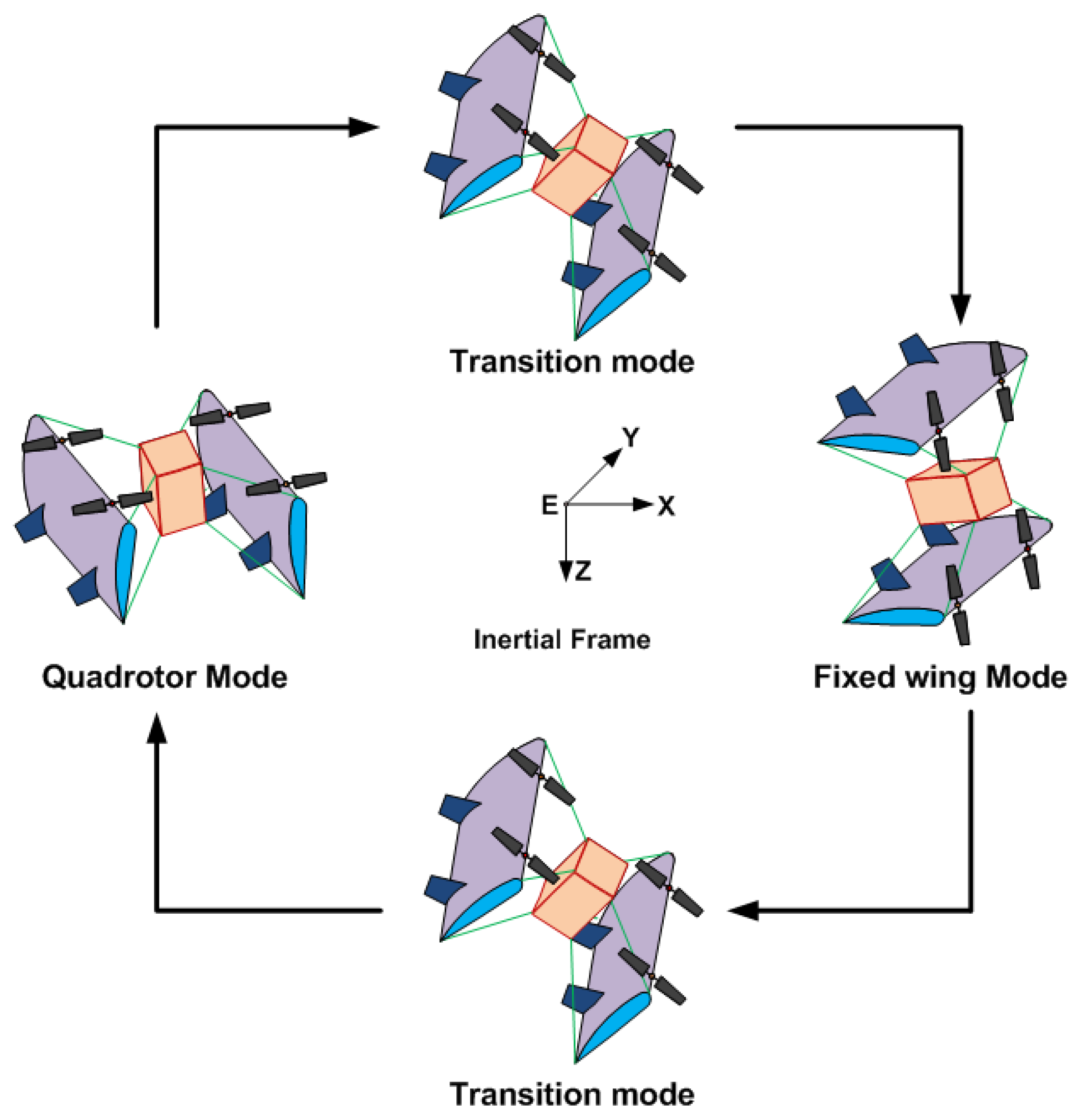
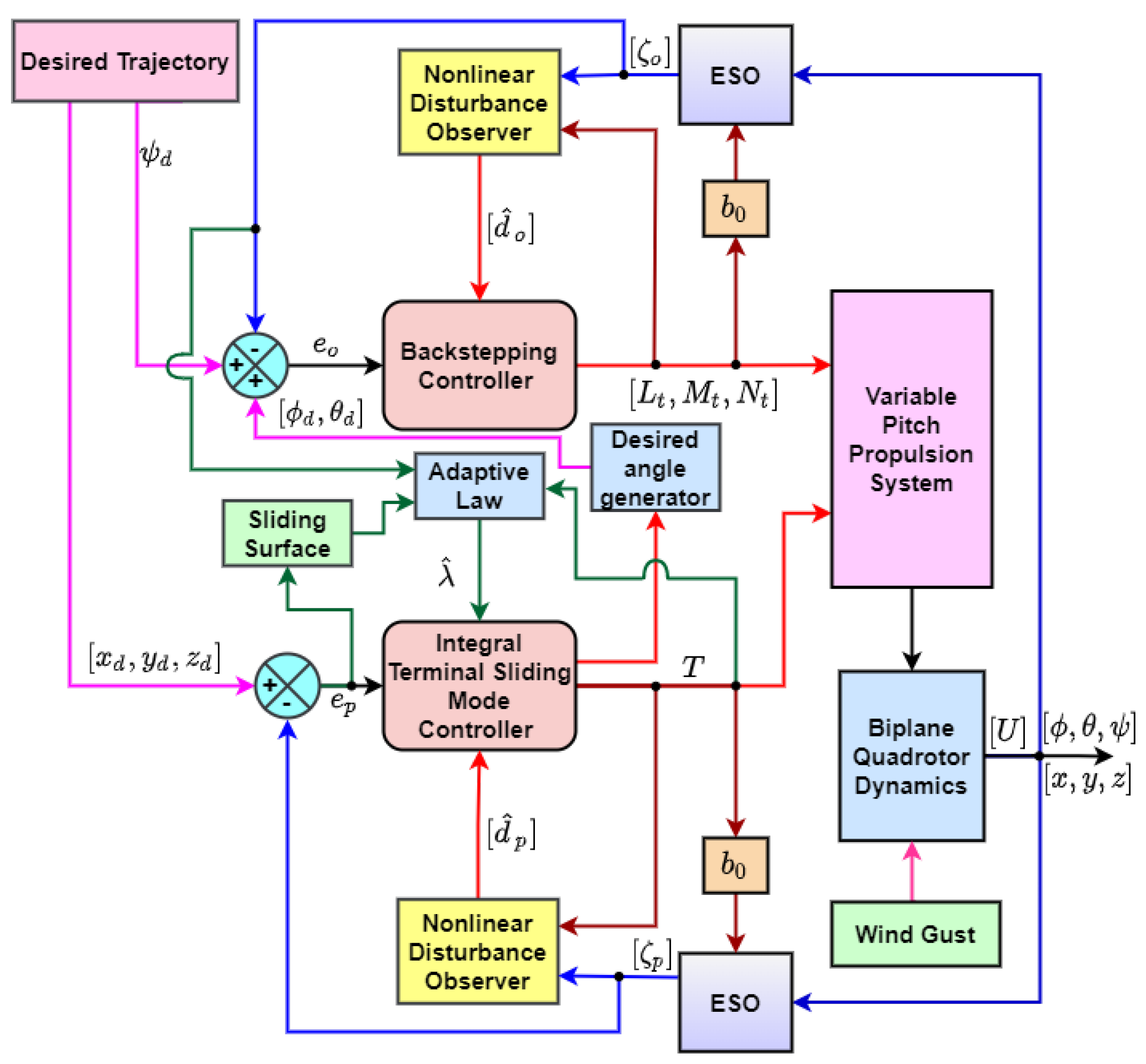
2. Mathematical Model and Control Architecture of Biplane Quadrotor
3. Observers for Controller Design
3.1. Stability Analysis of ESO
3.2. Backstepping Controller Design
3.3. ITSMC Controller Design
4. Adaptive Controller Design
4.1. Adaptive Backstepping Controller
4.2. Adaptive Hybrid Controller Design
5. Results and Discussions
6. Conclusions
- ESO estimates the position, altitude, and velocity using only position and attitude signals, and DO estimates the disturbance signal applied on a biplane quadrotor.
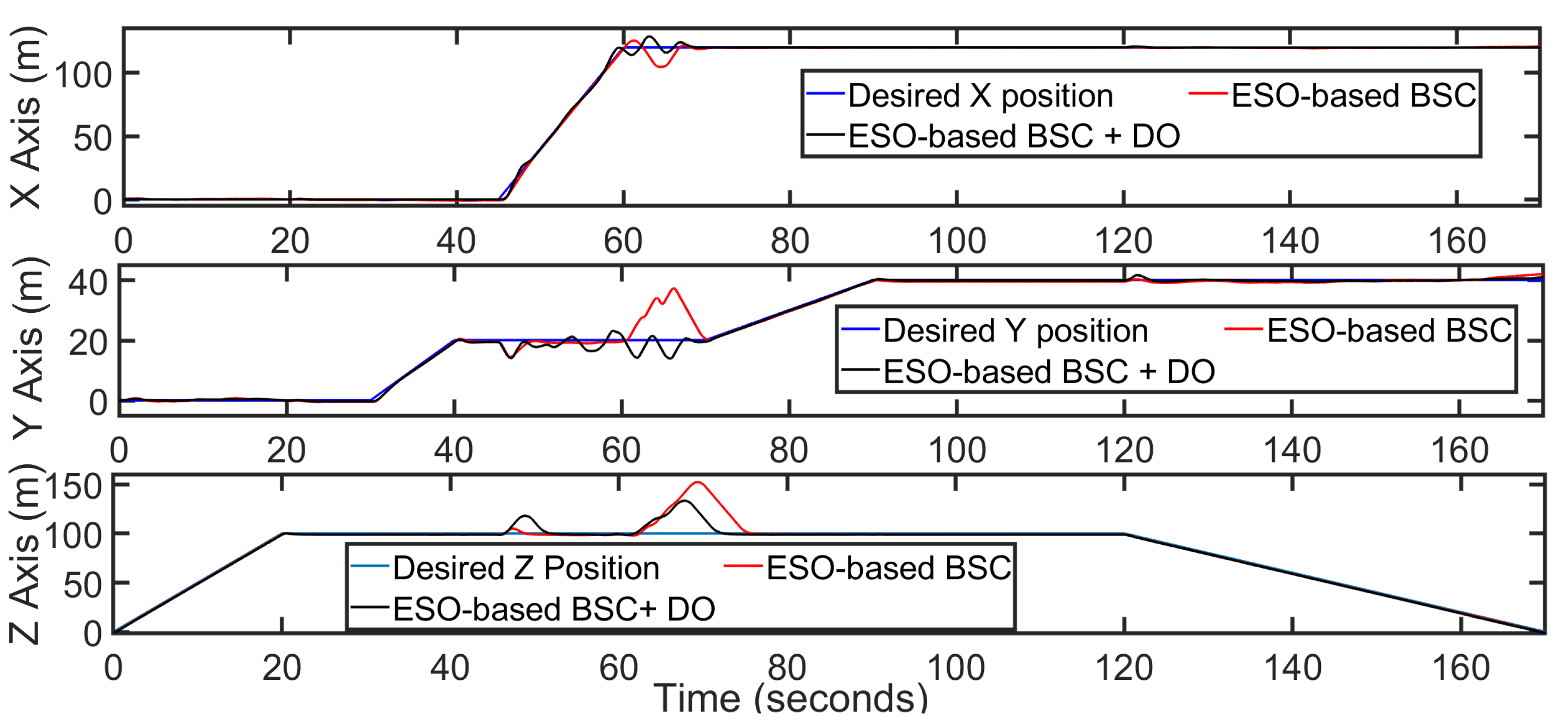
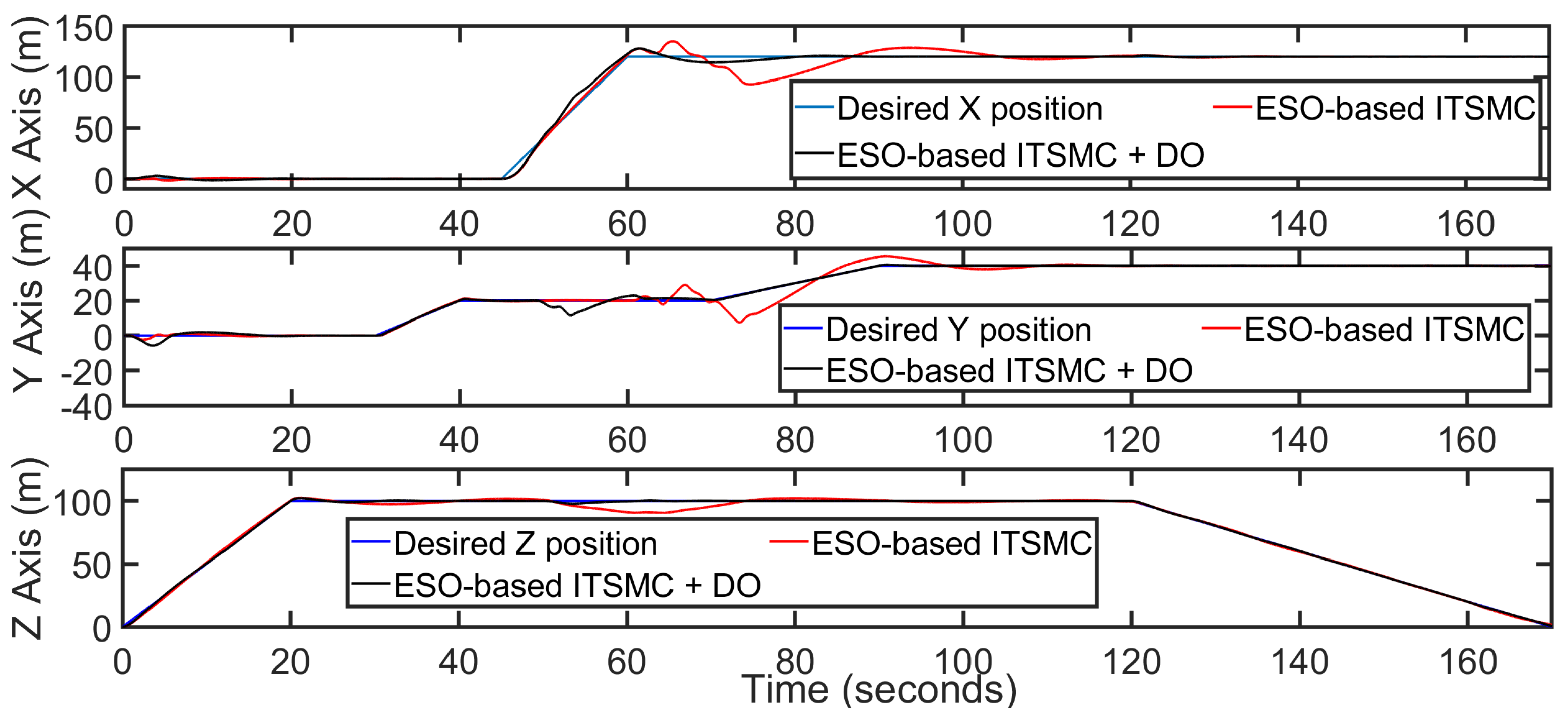
- x axis trajectory tracking by the ESO-based BSC with DO has a faster response, but overshoot is significant in comparison. ESO-based ITSMC with DO has a sluggish response, but ESO-based HC + DO has a faster response than the ESO-based ITSMC + DO, and less overshoot than the ESO-based BSC + DO.
- The ESO-based HC + DO is the faster and most effective controller among these three controllers.
- In altitude tracking, ESO-based ITSMC + DO has less overshoot than the other two controllers.
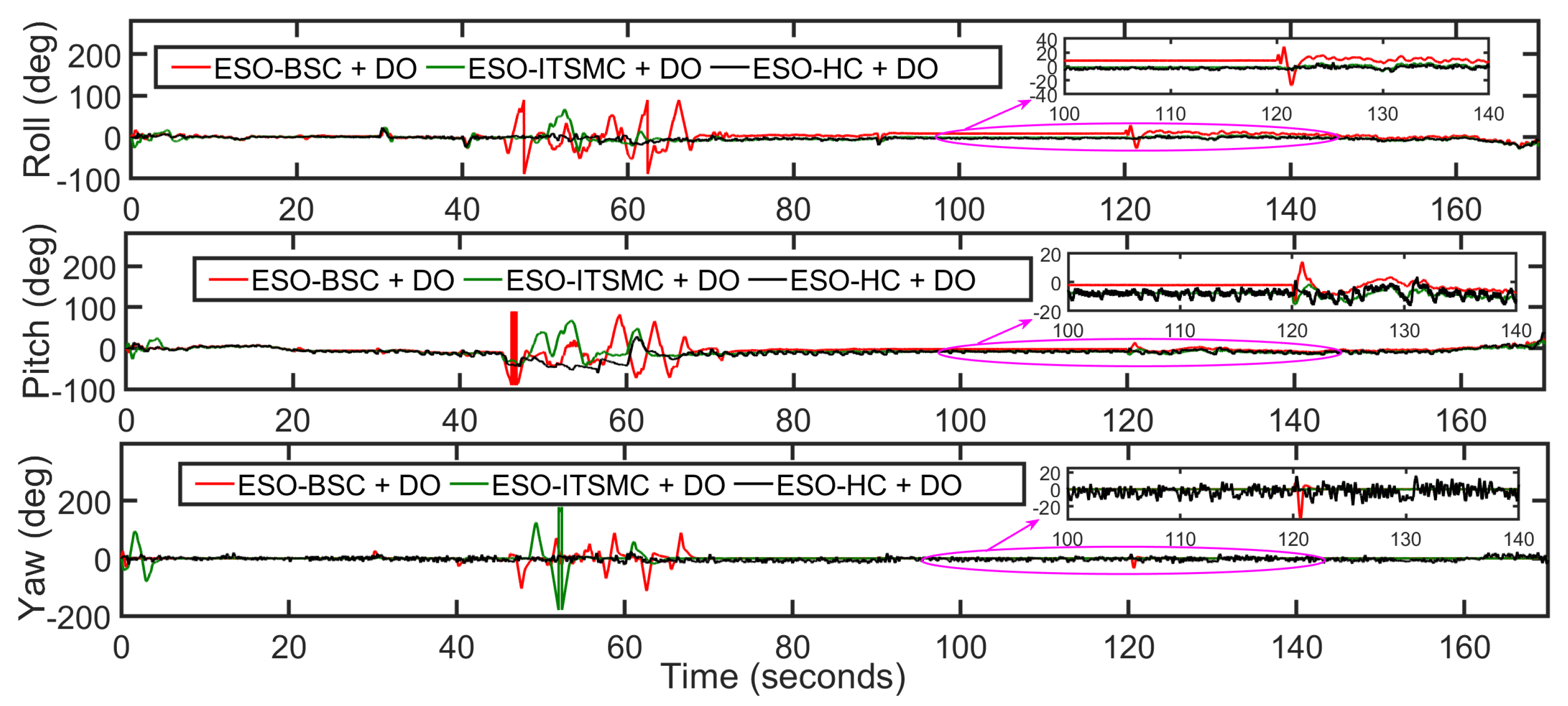
- Attitude tracking by the ESO-based HC + DO is better than ESO-based BSC, and ITSMC with DO.
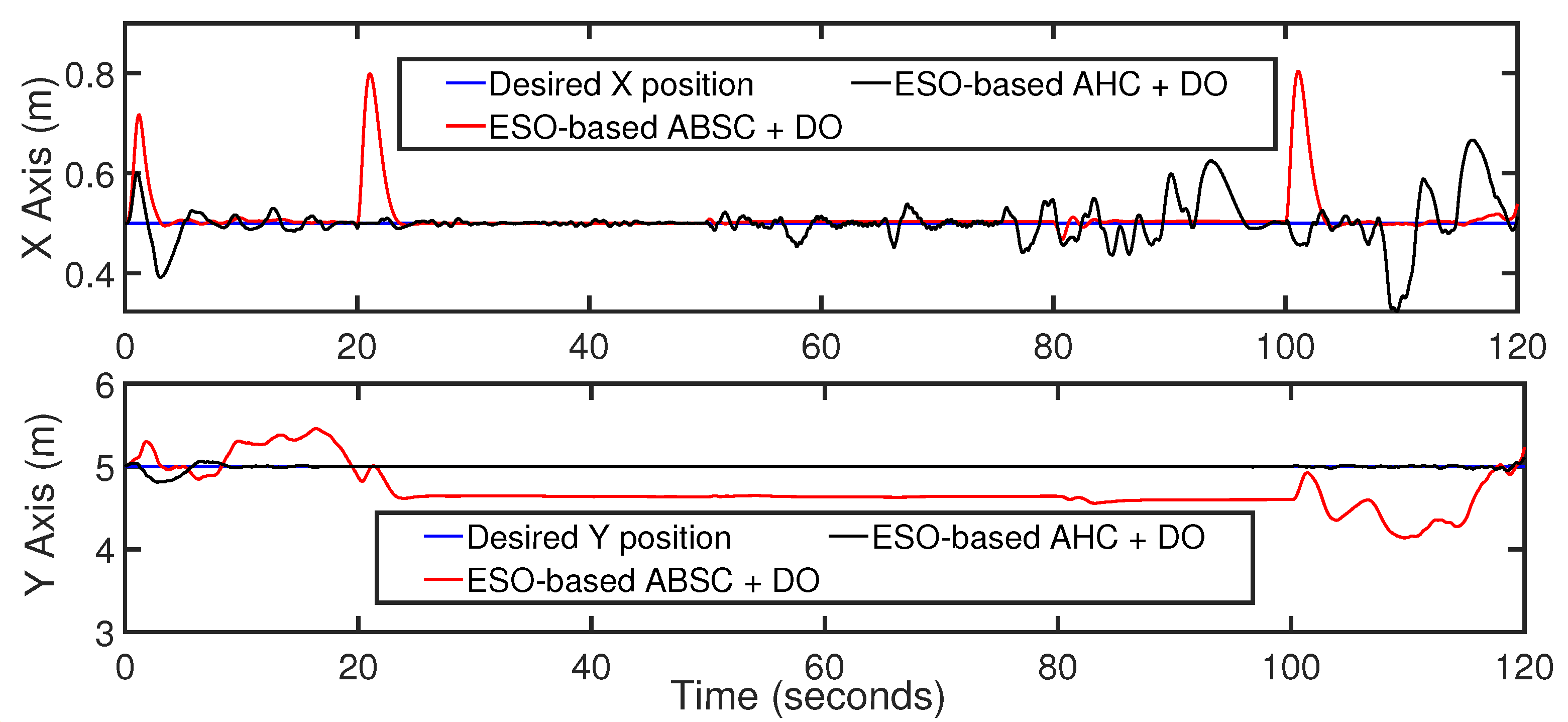
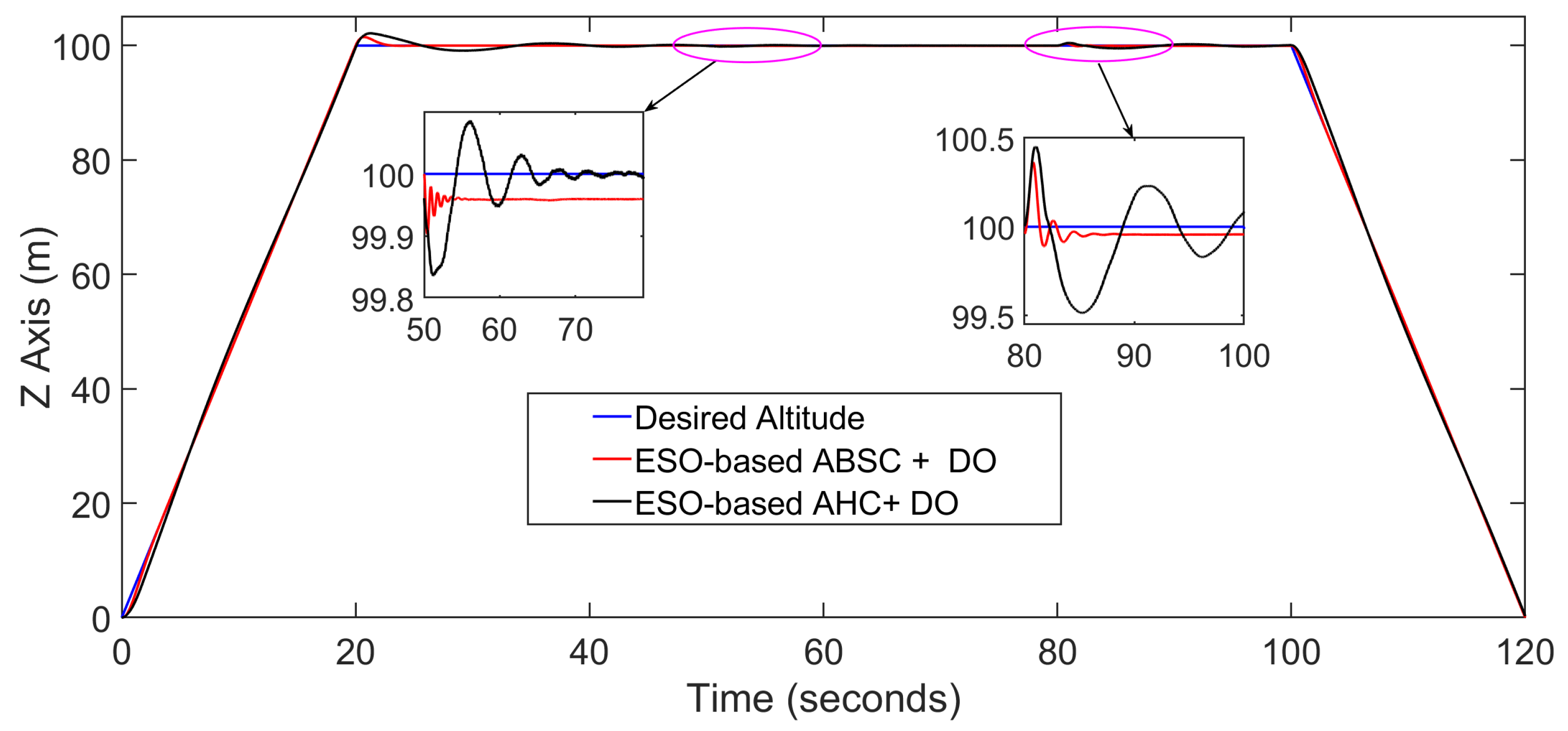
- ESO-based ABSC + DO generates a steady-state error in the altitude, while ESO-based AHC with DO can track the altitude efficiently. A large overshoot is generated by the ESO-based ABSC + DO during the x axis trajectory tracking, and a steady-state error of m is generated in the y axis trajectory tracking.
- Dual observer-based adaptive hybrid controller tracks the desired altitude trajectory in the presence of the wind gust and mass change. The proposed control architecture is effective.
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Oosedo, A.; Abiko, S.; Konno, A.; Koizumi, T.; Furui, T.; Uchiyama, M. Development of a quad rotor tail-sitter VTOL UAV without control surfaces and experimental verification. In Proceedings of the 2013 IEEE International Conference on Robotics and Automation, Karlsruhe, Germany, 6–10 May 2013; pp. 317–322. [Google Scholar]
- Oosedo, A.; Abiko, S.; Konno, A.; Uchiyama, M. Optimal transition from hovering to level-flight of a quadrotor tail-sitter UAV. Auton. Robot. 2016, 41, 1143–1159. [Google Scholar] [CrossRef]
- Hochstenbach, M.; Notteboom, C.; Theys, B.; Schutter, J. Design and Control of an Unmanned Aerial Vehicle for Autonomous Parcel Delivery with Transition from Vertical Take-off to Forward Flight–VertiKUL, a Quadcopter Tailsitter. Int. J. Micro Air Veh. 2015, 7, 395–406. [Google Scholar] [CrossRef] [Green Version]
- Swarnkar, S.; Parwana, H.; Kothari, M.; Abhishek, A. Biplane-Quadrotor Tail-Sitter UAV: Flight Dynamics and Control. J. Guid. Control Dyn. 2018, 41, 1049–1067. [Google Scholar] [CrossRef]
- Chipade, V.S.; Abhishek; Kothari, M.; Chaudhari, R.R. Systematic design methodology for development and flight testing of a variable pitch quadrotor biplane VTOL UAV for payload delivery. Mechatronics 2018, 55, 94–114. [Google Scholar] [CrossRef] [Green Version]
- Phillips, P.; Hrishikeshavan, V.; Rand, O.; Chopra, I. Design and development of a scaled quadrotor biplane with variable pitch proprotors for rapid payload delivery. In Proceedings of the American Helicopter Society 72nd Annual Forum, West Palm Beach, FL, USA, 17–19 May 2016; pp. 17–19. [Google Scholar]
- Yeo, D.; Hrishikeshavan, V.; Chopra, I. Gust detection and mitigation on a quad rotor biplane. In Proceedings of the AIAA Atmospheric Flight Mechanics Conference, San Diego, CA, USA, 4–8 January 2016; p. 1531. [Google Scholar]
- Ryseck, P.; Yeo, D.; Hrishikeshavan, V.; Chopra, I. Aerodynamic and mechanical design of a morphing winglet for a quadrotor biplane tail-sitter. In Proceedings of the Vertical Flight Society 8th Autonomous VTOL Symposium, Mesa, AZ, USA, 29–31 January 2019; pp. 29–31. [Google Scholar]
- Dalwadi, N.; Deb, D.; Kothari, M.; Ozana, S. Disturbance Observer-Based Backstepping Control of Tail-Sitter UAVs. Actuators 2021, 10, 119. [Google Scholar] [CrossRef]
- Dalwadi, N.; Deb, D.; Muyeen, S.M. Adaptive backstepping controller design of quadrotor biplane for payload delivery. IET Intell. Transp. Syst. 2022, 16, 1738–1752. [Google Scholar] [CrossRef]
- Dalwadi, N.; Deb, D.; Rath, J.J. Biplane Trajectory Tracking Using Hybrid Controller Based on Backstepping and Integral Terminal Sliding Mode Control. Drones 2022, 6, 58. [Google Scholar] [CrossRef]
- Dalwadi, N.; Deb, D.; Muyeen, S. Observer based rotor failure compensation for biplane quadrotor with slung load. Ain Shams Eng. J. 2022, 13, 101748. [Google Scholar] [CrossRef]
- Dalwadi, N.; Deb, D.; Ozana, S. Rotor Failure Compensation in a Biplane Quadrotor Based on Virtual Deflection. Drones 2022, 6, 176. [Google Scholar] [CrossRef]
- Ding, F.; Huang, J.; Wang, Y.; Zhang, J.; He, S. Sliding mode control with an extended disturbance observer for a class of underactuated system in cascaded form. Nonlinear Dyn. 2017, 90, 2571–2582. [Google Scholar] [CrossRef]
- Huang, J.; Ri, S.; Fukuda, T.; Wang, Y. A Disturbance Observer Based Sliding Mode Control for a Class of Underactuated Robotic System With Mismatched Uncertainties. IEEE Trans. Autom. Control 2019, 64, 2480–2487. [Google Scholar] [CrossRef]
- Rojsiraphisal, T.; Mobayen, S.; Asad, J.H.; Vu, M.T.; Chang, A.; Puangmalai, J. Fast Terminal Sliding Control of Underactuated Robotic Systems Based on Disturbance Observer with Experimental Validation. Mathematics 2021, 9, 1935. [Google Scholar] [CrossRef]
- Castillo, A.; Sanz, R.; Garcia, P.; Qiu, W.; Wang, H.; Xu, C. Disturbance observer-based quadrotor attitude tracking control for aggressive maneuvers. Control Eng. Pract. 2019, 82, 14–23. [Google Scholar] [CrossRef]
- Chen, A.J.; Sun, M.J.; Wang, Z.H.; Feng, N.Z.; Shen, Y. Attitude trajectory tracking of quadrotor UAV using super-twisting observer-based adaptive controller. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2020, 235, 1146–1157. [Google Scholar] [CrossRef]
- Shin, D.; Song, Y.; Oh, J.; Oh, H. Nonlinear Disturbance Observer-Based Standoff Target Tracking for Small Fixed-Wing UAVs. Int. J. Aeronaut. Space Sci. 2020, 22, 108–119. [Google Scholar] [CrossRef]
- Dhaybi, M.; Daher, N. Accurate Real-time Estimation of the Inertia Tensor of Package Delivery Quadrotors. In Proceedings of the 2020 American Control Conference (ACC), Denver, CO, USA, 1–3 July 2020; IEEE: Piscataway, NJ, USA, 2020. [Google Scholar] [CrossRef]
- Boss, C.J.; Srivastava, V. A High-Gain Observer Approach to Robust Trajectory Estimation and Tracking for a Multi-rotor UAV. arXiv 2021, arXiv:2103.13429. [Google Scholar]
- Novella-Rodrìguez, D.F.; Witrant, E.; del Muro-Cuéllar, B.; Márquez-Rubio, J.F. Adaptive multi-observer design for systems with unknown long input delay. IFAC-PapersOnLine 2019, 52, 37–42. [Google Scholar] [CrossRef]
- Guo, K.; Jia, J.; Yu, X.; Guo, L.; Xie, L. Multiple observers based anti-disturbance control for a quadrotor UAV against payload and wind disturbances. Control Eng. Pract. 2020, 102, 104560. [Google Scholar] [CrossRef]
- Xingling, S.; Jun, L.; Honglun, W. Robust back-stepping output feedback trajectory tracking for quadrotors via extended state observer and sigmoid tracking differentiator. Mech. Syst. Signal Process. 2017, 104, 631–647. [Google Scholar] [CrossRef]
- Xuan-Mung, N.; Hong, S.K. Robust Backstepping Trajectory Tracking Control of a Quadrotor with Input Saturation via Extended State Observer. Appl. Sci. 2019, 9, 5184. [Google Scholar] [CrossRef]
- Wang, H.; Li, N.; Wang, Y.; Su, B. Backstepping Sliding Mode Trajectory Tracking via Extended State Observer for Quadrotors with Wind Disturbance. Int. J. Control Autom. Syst. 2021, 19, 3273–3284. [Google Scholar] [CrossRef]
- Dou, J.; Kong, X.; Wen, B. Altitude and attitude active disturbance rejection controller design of a quadrotor unmanned aerial vehicle. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2016, 231, 1732–1745. [Google Scholar] [CrossRef]
- Xi, H.; Zhang, D.; Zhou, T.; Yang, Y.; Wei, Q. An Anti-wind Modeling Method of Quadrotor Aircraft and Cascade Controller Design Based on Improved Extended State Observer. Int. J. Control Autom. Syst. 2020, 19, 1363–1374. [Google Scholar] [CrossRef]
- Lien, Y.H.; Peng, C.C.; Chen, Y.H. Adaptive Observer-Based Fault Detection and Fault-Tolerant Control of Quadrotors under Rotor Failure Conditions. Appl. Sci. 2020, 10, 3503. [Google Scholar] [CrossRef]
- Lyu, X.; Zhou, J.; Gu, H.; Li, Z.; Shen, S.; Zhang, F. Disturbance Observer Based Hovering Control of Quadrotor Tail-Sitter VTOL UAVs Using H∞ Synthesis. IEEE Robot. Autom. Lett. 2018, 3, 2910–2917. [Google Scholar] [CrossRef]
- Liu, H.; Peng, F.; Lewis, F.L.; Wan, Y. Robust Tracking Control for Tail-Sitters in Flight Mode Transitions. IEEE Trans. Aerosp. Electron. Syst. 2019, 55, 2023–2035. [Google Scholar] [CrossRef]
- Li, B.; Zhou, W.; Sun, J.; Wen, C.Y.; Chen, C.K. Development of Model Predictive Controller for a Tail-Sitter VTOL UAV in Hover Flight. Sensors 2018, 18, 2859. [Google Scholar] [CrossRef] [Green Version]
- Yang, H.; Cheng, L.; Xia, Y.; Yuan, Y. Active Disturbance Rejection Attitude Control for a Dual Closed-Loop Quadrotor Under Gust Wind. IEEE Trans. Control Syst. Technol. 2018, 26, 1400–1405. [Google Scholar] [CrossRef]
- Lungu, M. Backstepping and dynamic inversion combined controller for auto-landing of fixed wing UAVs. Aerosp. Sci. Technol. 2020, 96, 105526. [Google Scholar] [CrossRef]
- Zhou, L.; Xu, S.; Jin, H.; Jian, H. A hybrid robust adaptive control for a quadrotor UAV via mass observer and robust controller. Adv. Mech. Eng. 2021, 13, 168781402110027. [Google Scholar] [CrossRef]
- Liu, J.; Gai, W.; Zhang, J.; Li, Y. Nonlinear Adaptive Backstepping with ESO for the Quadrotor Trajectory Tracking Control in the Multiple Disturbances. Int. J. Control. Autom. Syst. 2019, 17, 2754–2768. [Google Scholar] [CrossRef]
- Mofid, O.; Mobayen, S.; Fekih, A. Adaptive Integral-Type Terminal Sliding Mode Control for Unmanned Aerial Vehicle Under Model Uncertainties and External Disturbances. IEEE Access 2021, 9, 53255–53265. [Google Scholar] [CrossRef]
- Navabi, M.; Davoodi, A.; Mirzaei, H. Trajectory tracking of under-actuated quadcopter using Lyapunov-based optimum adaptive controller. Proc. Inst. Mech. Eng. Part G J. Aerosp. Eng. 2022, 236, 202–215. [Google Scholar] [CrossRef]
- Torchani, B.; Sellami, A.; Garcia, G. Variable speed wind turbine control by discrete-time sliding mode approach. Isa Trans. 2016, 62, 81–86. [Google Scholar] [CrossRef]
- Labbadi, M.; Cherkaoui, M. Robust Integral Terminal Sliding Mode Control for Quadrotor UAV with External Disturbances. Int. J. Aerosp. Eng. 2019, 2019, 2016416. [Google Scholar] [CrossRef]
- Tatom, F.B.; Smith, S.R.; Fichtl, G.H.; Campbell, C.W. Simulation of atmospheric turbulent gusts and gust gradients. J. Aircr. 1982, 19, 264–271. [Google Scholar] [CrossRef]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Value |
|---|---|
| g | 9.8 ms−2 |
| Mass (m) | 12 kg |
| 1.86 kg·m2 | |
| 2.03 kg·m2 | |
| 3.617 kg·m2 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dalwadi, N.; Deb, D.; Ozana, S. Dual Observer Based Adaptive Controller for Hybrid Drones. Drones 2023, 7, 48. https://doi.org/10.3390/drones7010048
Dalwadi N, Deb D, Ozana S. Dual Observer Based Adaptive Controller for Hybrid Drones. Drones. 2023; 7(1):48. https://doi.org/10.3390/drones7010048
Chicago/Turabian StyleDalwadi, Nihal, Dipankar Deb, and Stepan Ozana. 2023. "Dual Observer Based Adaptive Controller for Hybrid Drones" Drones 7, no. 1: 48. https://doi.org/10.3390/drones7010048