

Elliptical Multi-Orbit Circumnavigation Control of UAVS in Three-Dimensional Space Depending on Angle Information Only


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- (1)
- A circumnavigation control law in three-dimensional space using only angle information is proposed, and an estimation method is used to obtain the position information of the target. In this way, the limitation of requiring knowledge of both target position information and angle information at the same time is eliminated.
- (2)
- The circumnavigation trajectory is set as an ellipse instead of being limited to a circular trajectory, and the major and minor semi-axes of the ellipse can be arbitrarily set. At the same time, UAVs can be deployed on multiple orbits by setting different coefficients.
- (3)
- Using the dynamic equation of the UAV, the three-dimensional position estimator and the adjustable elliptical orbit, the relative ideal velocity equation is designed, and by constructing the dynamic error between the ideal relative velocity and the actual velocity, the circumnavigation control problem is transformed into the tracking problem of relative velocity. At the same time, by adopting sliding mode control, the robustness of the system is greatly improved, and the stability of the system is proved by the Lyapunov method.
2. Problem Formulation
2.1. Define the Desired Angle
2.2. Multi-Orbit Circumnavigation
2.3. Dynamic Model of UAVs
2.4. Control Objective
- (1)
- The UAV group should circumnavigate the target on multiple elliptical orbits, so the circumnavigation radius of each UAV is different.
- (2)
- During the circumnavigation process, the circumnavigation angular velocity of the UAV group should be consistent.
- (3)
- The angular spacing between adjacent UAVs should remain unchanged.
3. Circumnavigation Control
4. Simulation Results
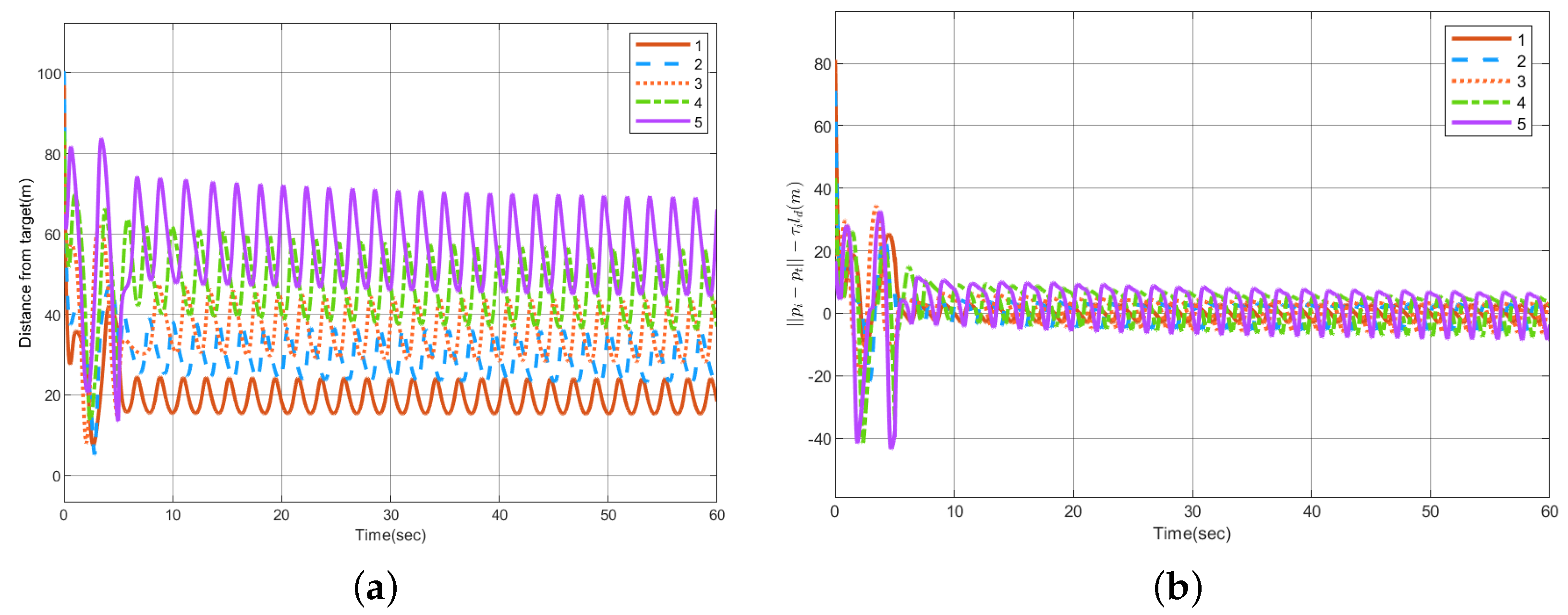
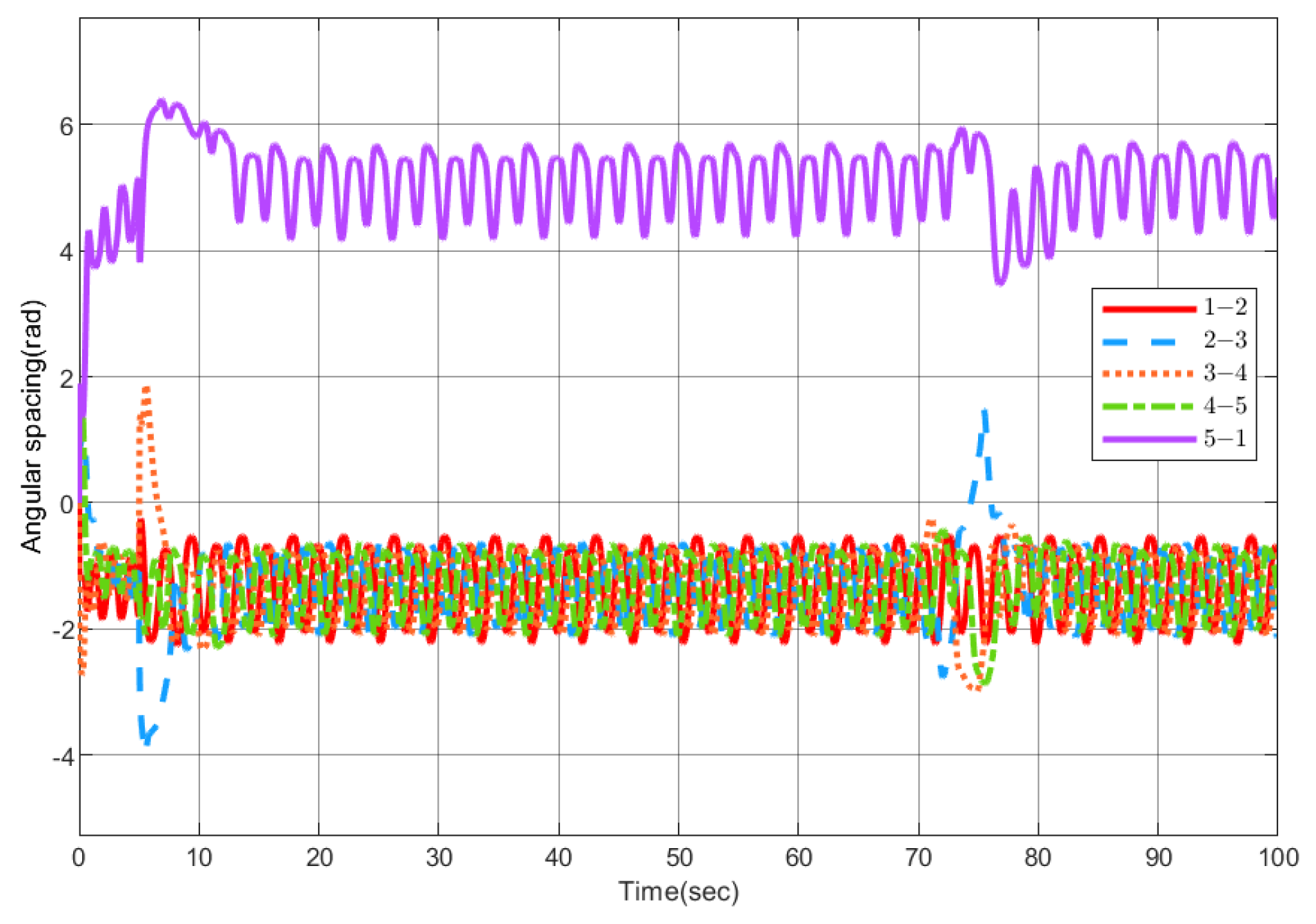
4.1. Case 1: Target Moves in a Straight Line
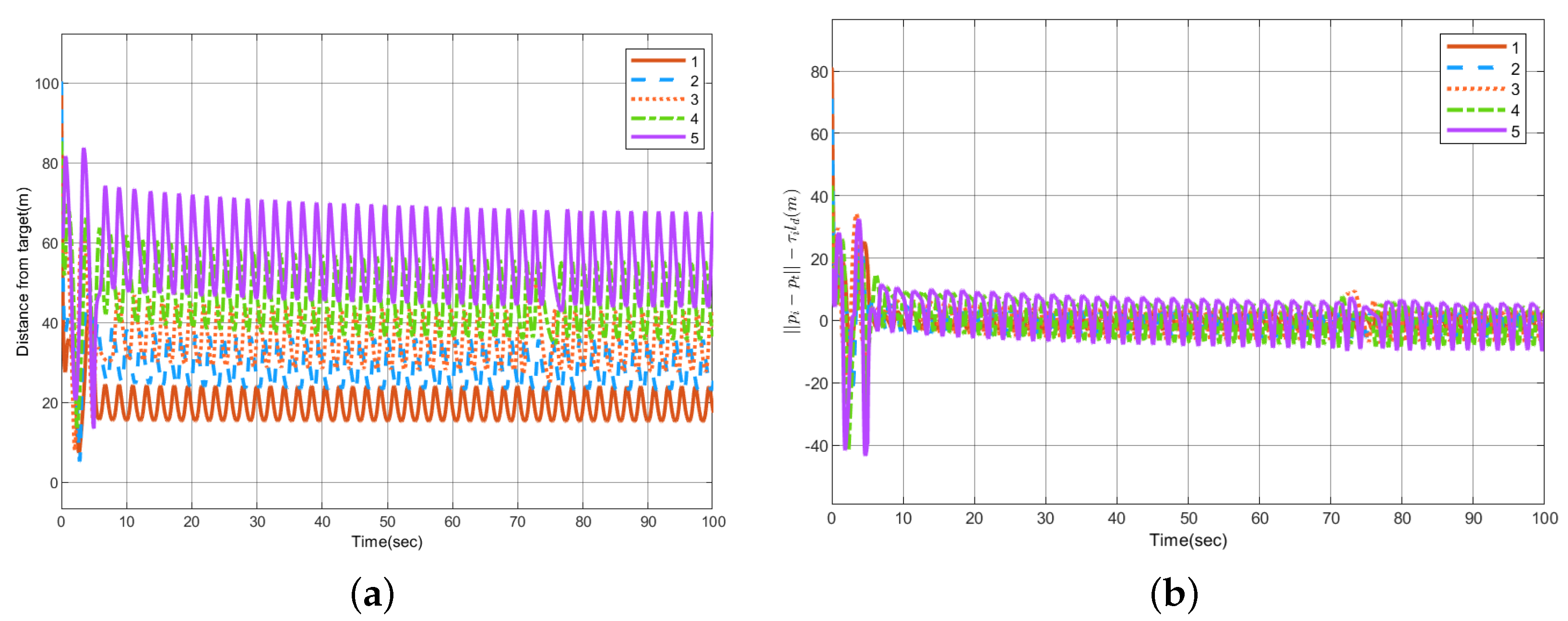
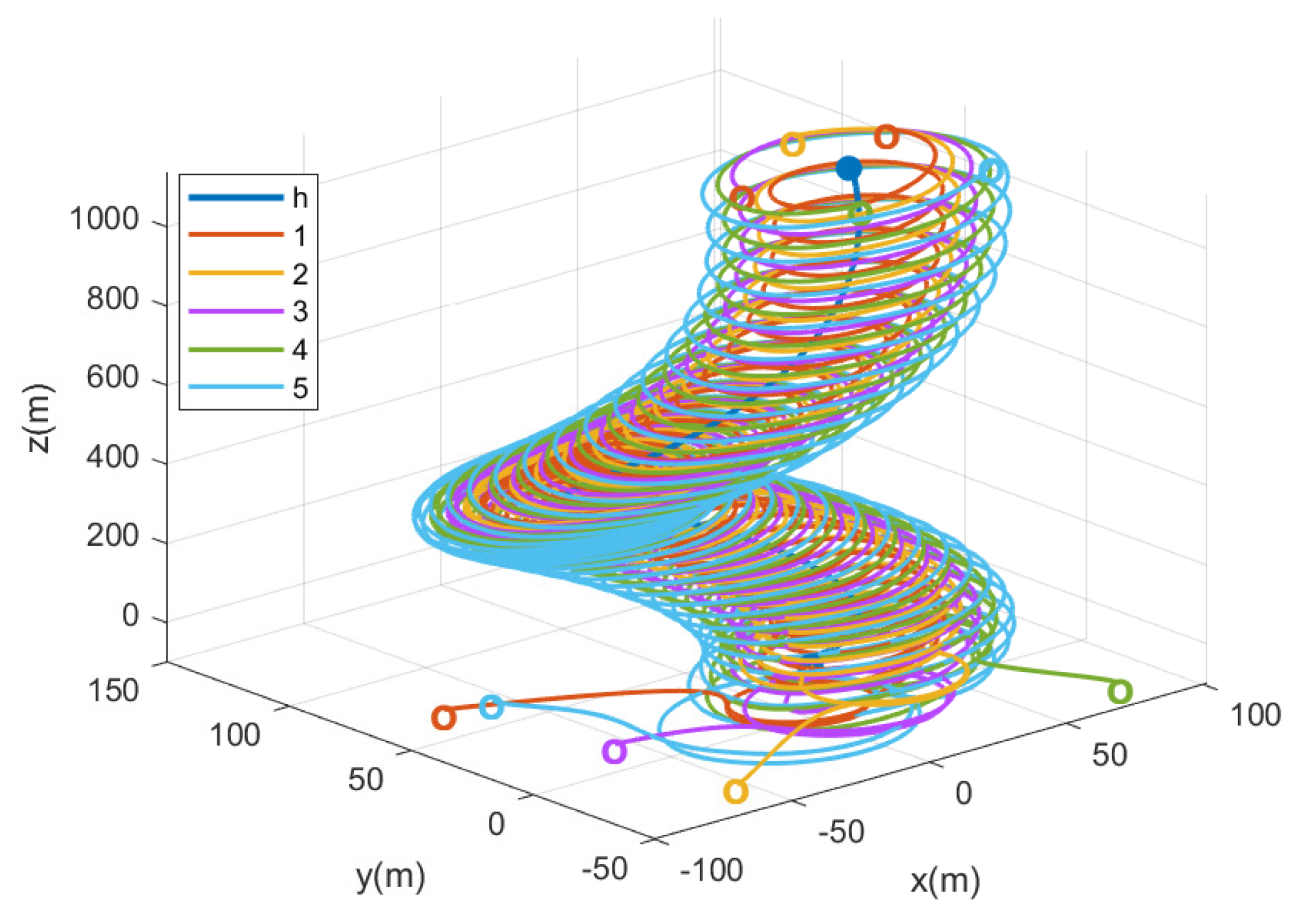
4.2. Case 2: Target Moves in a Curve
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Luo, Y.; Yu, X.; Yang, D.; Zhou, B. A survey of intelligent transmission line inspection based on unmanned aerial vehicle. Artif. Intell. Rev. 2022, 1–29. [Google Scholar] [CrossRef]
- Israr, A.; Ali, Z.A.; Alkhammash, E.H.; Jussila, J.J. Optimization Methods Applied to Motion Planning of Unmanned Aerial Vehicles: A Review. Drones 2022, 6, 126. [Google Scholar] [CrossRef]
- Ming, Z.; Huang, H. A 3d vision cone based method for collision free navigation of a quadcopter UAV among moving obstacles. Drones 2021, 5, 134. [Google Scholar] [CrossRef]
- Lan, Y.; Lin, Z.; Cao, M.; Yan, G. A distributed reconfigurable control law for escorting and patrolling missions using teams of unicycles. In Proceedings of the 49th IEEE Conference on Decision and Control, Atlanta, GA, USA, 15–17 December 2010; pp. 5456–5461. [Google Scholar]
- Zhang, Y.; Wen, Y.; Li, F.; Chen, Y. Distributed observer-based formation tracking control of multi-agent systems with multiple targets of unknown periodic inputs. Unmanned Syst. 2019, 7, 15–23. [Google Scholar] [CrossRef]
- Zhang, M.; Jia, J.; Mei, J. A composite system theory-based guidance law for cooperative target circumnavigation of UAVs. Aerosp. Sci. Technol. 2021, 118, 107034. [Google Scholar] [CrossRef]
- Le, W.; Xue, Z.; Chen, J.; Zhang, Z. Coverage Path Planning Based on the Optimization Strategy of Multiple Solar Powered Unmanned Aerial Vehicles. Drones 2022, 6, 203. [Google Scholar] [CrossRef]
- Yan, J.; Yu, Y.; Wang, X. Distance-Based Formation Control for Fixed-Wing UAVs with Input Constraints: A Low Gain Method. Drones 2022, 6, 159. [Google Scholar] [CrossRef]
- Leonard, N.E.; Paley, D.A.; Lekien, F.; Sepulchre, R.; Fratantoni, D.M.; Davis, R.E. Collective motion, sensor networks, and ocean sampling. Proc. IEEE 2007, 95, 48–74. [Google Scholar] [CrossRef] [Green Version]
- Kothari, M.; Sharma, R.; Postlethwaite, I.; Beard, R.W.; Pack, D. Cooperative target-capturing with incomplete target information. J. Intell. Robot. Syst. 2013, 72, 373–384. [Google Scholar] [CrossRef]
- Sepulchre, R.; Paley, D.A.; Leonard, N.E. Stabilization of planar collective motion: All-to-all communication. IEEE Trans. Autom. Control 2007, 52, 811–824. [Google Scholar] [CrossRef]
- Sepulchre, R.; Paley, D.A.; Leonard, N.E. Stabilization of planar collective motion with limited communication. IEEE Trans. Autom. Control 2008, 53, 706–719. [Google Scholar] [CrossRef] [Green Version]
- Marshall, J.A.; Broucke, M.E.; Francis, B.A. Formations of vehicles in cyclic pursuit. IEEE Trans. Autom. Control 2004, 49, 1963–1974. [Google Scholar] [CrossRef]
- Deghat, M.; Shames, I.; Anderson, B.D.; Yu, C. Localization and circumnavigation of a slowly moving target using bearing measurements. IEEE Trans. Autom. Control 2014, 59, 2182–2188. [Google Scholar] [CrossRef]
- Wang, J.; Ma, B.; Yan, K. Mobile Robot Circumnavigating an Unknown Target Using Only Range Rate Measurement. IEEE Trans. Circ. Syst. I Express Briefs 2021, 69, 2. [Google Scholar] [CrossRef]
- Greiff, M.; Deghat, M.; Sun, Z.; Robertsson, A. Target Localization and Circumnavigation with Integral Action in R2. IEEE Control Syst. Lett. 2021, 6, 1250–1255. [Google Scholar] [CrossRef]
- Summers, T.H.; Akella, M.R.; Mears, M.J. Coordinated standoff tracking of moving targets: Control laws and information architectures. J. Guid. Control Dyn. 2009, 32, 56–69. [Google Scholar] [CrossRef]
- Huo, M.; Duan, H.; Fan, Y. Pigeon-inspired circular formation control for multi-UAV system with limited target information. Guid. Navig. Control 2021, 1, 2150004. [Google Scholar] [CrossRef]
- Seyboth, G.S.; Wu, J.; Qin, J.; Yu, C.; Allgöwer, F. Collective circular motion of unicycle type vehicles with nonidentical constant velocities. IEEE Trans. Control Netw. Syst. 2014, 1, 167–176. [Google Scholar] [CrossRef]
- Hernandez, S.; Paley, D.A. Three-dimensional motion coordination in a spatiotemporal flowfield. IEEE Trans. Autom. Control 2010, 55, 2805–2810. [Google Scholar] [CrossRef]
- Kim, T.H.; Hara, S.; Hori, Y. Cooperative control of multi-agent dynamical systems in target-enclosing operations using cyclic pursuit strategy. Int. J. Control 2010, 83, 2040–2052. [Google Scholar] [CrossRef]
- Dong, F.; You, K.; Song, S. Target encirclement with any smooth pattern using range-based measurements. Automatica 2020, 116, 108932. [Google Scholar] [CrossRef] [Green Version]
- Cao, Y. UAV circumnavigating an unknown target under a GPS-denied environment with range-only measurements. Automatica 2015, 55, 150–158. [Google Scholar] [CrossRef] [Green Version]
- Shi, L.; Zheng, R.; Liu, M.; Zhang, S. Distributed circumnavigation control of autonomous underwater vehicles based on local information. Syst. Control Lett. 2021, 148, 104873. [Google Scholar] [CrossRef]
- Yu, X.; Liu, L. Cooperative control for moving-target circular formation of nonholonomic vehicles. IEEE Trans. Autom. Control 2016, 62, 3448–3454. [Google Scholar] [CrossRef]
- Sen, A.; Sahoo, S.R.; Kothari, M. Circumnavigation on multiple circles around a nonstationary target with desired angular spacing. IEEE Trans. Cybern. 2019, 51, 222–232. [Google Scholar] [CrossRef]
- Mehrabian, A.R.; Tafazoli, S.; Khorasani, K. Coordinated Attitude Control of Spacecraft Formation without Angular Velocity Feedback: A Decentralized Approach; Aerospace Research Central: Lawrence, KS, USA, 2009; p. 6289. [Google Scholar]
- Chen, Y.; Liang, J.; Miao, Z.; Wang, Y. Distributed Formation Control of Quadrotor UAVs Based on Rotation Matrices without Linear Velocity Feedback. Int. J. Control Autom. Syst. 2021, 19, 3464–3474. [Google Scholar] [CrossRef]
- Speck, C.; Bucci, D.J. Distributed uav swarm formation control via object-focused, multi-objective sarsa. In Proceedings of the 2018 Annual American Control Conference, Milwaukee, WI, USA, 27–29 June 2018; pp. 6596–6601. [Google Scholar]
- Qiao, L.; Zhang, W. Adaptive second-order fast nonsingular terminal sliding mode tracking control for fully actuated autonomous underwater vehicles. IEEE J. Ocean. Eng. 2018, 44, 363–385. [Google Scholar] [CrossRef]
- Bai, A.; Luo, Y.; Zhang, H.; Li, Z. L2-gain robust trajectory tracking control for quadrotor UAV with unknown disturbance. Asian J. Control 2021, 1–13. [Google Scholar] [CrossRef]
- Li, D.; Cao, K.; Kong, L.; Yu, H. Fully Distributed Cooperative Circumnavigation of Networked Unmanned Aerial Vehicles. IEEE/ASME Trans. Mechatron. 2021, 26, 709–718. [Google Scholar] [CrossRef]

















Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Wang, Z.; Luo, Y. Elliptical Multi-Orbit Circumnavigation Control of UAVS in Three-Dimensional Space Depending on Angle Information Only. Drones 2022, 6, 296. https://doi.org/10.3390/drones6100296
Wang Z, Luo Y. Elliptical Multi-Orbit Circumnavigation Control of UAVS in Three-Dimensional Space Depending on Angle Information Only. Drones. 2022; 6(10):296. https://doi.org/10.3390/drones6100296
Chicago/Turabian StyleWang, Zhen, and Yanhong Luo. 2022. "Elliptical Multi-Orbit Circumnavigation Control of UAVS in Three-Dimensional Space Depending on Angle Information Only" Drones 6, no. 10: 296. https://doi.org/10.3390/drones6100296