1. Introduction
In recent years, multirotor unmanned aerial vehicles (UAV) have been used in a wide range of fields, including civil engineering, agriculture, industrial infrastructure, security, and remote sensing. In addition, as a next-generation application, research and development on “aerial manipulation” are being conducted all over the world to realize high-altitude work with physical contact by mounting a robotic arm on a multirotor, which is called an “aerial manipulator” [
1,
2]. The development of aerial manipulators is expected to be applied to work at heights, including the inspection of industrial infrastructures, such as bridges, high-voltage power lines, tunnels, wind turbines, and dams. The work area of the multirotor in aerial manipulation is divided into upper, lateral, and lower parts of the aircraft [
3]. Perching, twisting work at high places [
4,
5], and percussion inspection work on walls [
6] have also been reported. However, the typical type of multirotor requires tilting the body frame to generate thrust in the horizontal direction. In addition, the posture is tilted when horizontal forces are generated, such as horizontal movement, braking, and maintaining the aircraft position against crosswinds. The motion changes the position and attitude of the end-effector mounted on the multirotor while positioned on the horizontal plane. Moreover, to generate a stable force on the target object, it is necessary to keep the multirotor in a tilted position, and it can cause the multirotor to crush. Thus, to improve the performance of the aerial manipulator, realizing independent position and attitude control need to be realized.
To perform the position and attitude control of a multirotor independently, which is impossible with a typical multirotor, several studies on novel platform development are reported. A method in which the propeller of a multirotor is tilted from the horizontal plane has been theoretically analyzed [
7], developed [
8], and performed outdoors [
9]. The other method in which the propeller is equipped with a single [
10] or multi [
11] tilt mechanism that can exert a wrench in any orientation while maintaining efficient flight configurations is presented. Moreover, a novel multi-linked type of multirotor is developed [
12] and used to perform a manipulation task [
13]. In these studies, new aerial robot hardware structures and control techniques are needed to put them to practical use.
On the other hand, many flight controllers that can fly typical multirotors with high stability are already on the market and are widely being used. Therefore, we focused on utilizing a typical multirotor and proposed an add-on planar translational driving system (hereafter, ATD), which consists of three ducted fans arranged to generate thrust in the horizontal direction and is able to translate the multirotor by keeping the attitude horizontal [
14]. In addition, the design of the controller is very simple, and fine positioning can be easily achieved. By retrofitting the ATD to a commercially available and reliable multirotor platform, the performance can be enhanced, which requires aerial manipulation, such as accurate positioning and stable force generation for the manipulation task. Therefore, it is expected to be applied to various types of tasks at high altitudes.
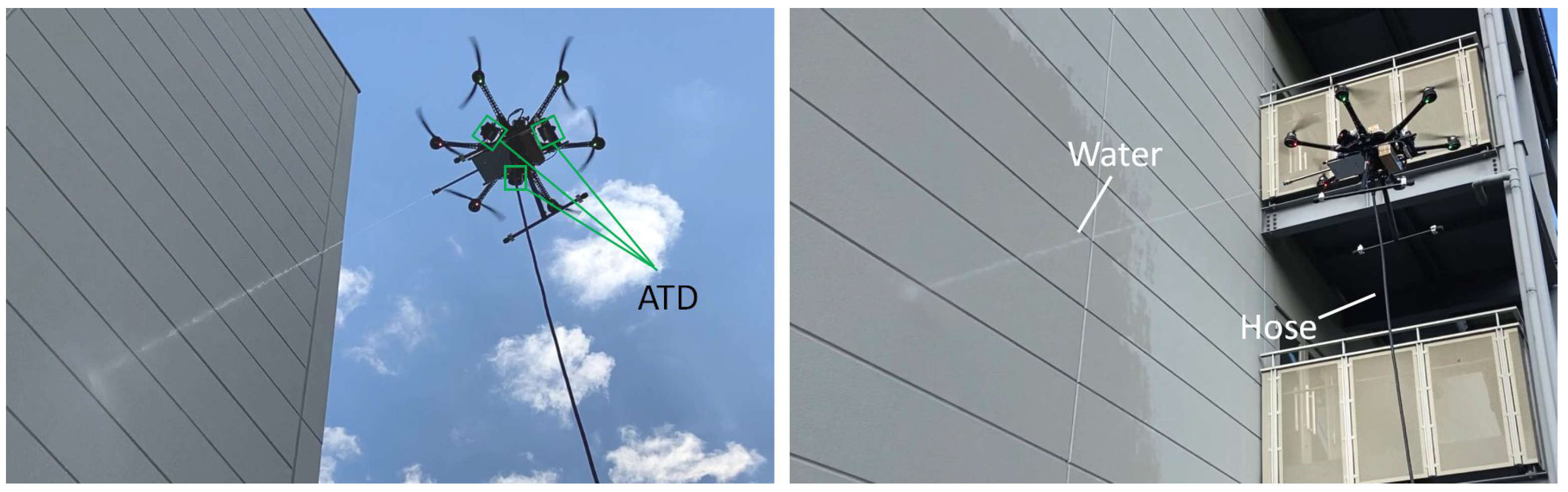
In this study, we focused on a high-pressure washing task (see
Figure 1), which is one of the applications employing ATD. High-pressure washing tasks at high altitudes are usually carried out using a crane or cable-suspended gondola, and it is a very dangerous operation for the workers, with the risk of crashing [
15]. Thus, it can effectively reduces accidents by replacing workers with multirotors. In order to realize the high-pressure washing task, it is necessary to generate an appropriate force to support the high-pressure washer nozzle while injecting water and to accurately inject water toward the target location. In [
16], a three-dimensional hybrid kinematics-force (HKF) model for fluid force estimation coupled with position optimization of an aerial robot capable of high-pressure fluid ejection is presented. The reaction force from the water ejection is suppressed by the UAV body itself. In our case, by installing the ATD on the multirotor platform, the driving force from the ATD allows the multirotor to suppress the reaction force from the high-pressure washer and translates the multirotor by staying horizontal. A case in which a vertical propeller was added to a multirotor UAV so that it could generate horizontal force to conduct a percussion inspection was reported [
17]. In our case, it requires a multirotor to generate a stable horizontal force in all directions.
In this study, we mainly redesigned the ATD and developed a multirotor system for high-pressure washing tasks. The system was designed for performing washing tasks semi-autonomously; it allows the multirotor to keep a constant distance from the target while facing perpendicular to the wall. The design concepts of the proposed multirotor are presented in
Section 2.
Section 3 presents the configuration of the designed system.
Section 4 presents the sensor feedback of the multirotor for the washing task.
Section 5 evaluates the outdoor experiment to verify if the reaction force is actually suppressed and if the attitude of the multirotor was kept horizontal while spraying the water. In addition, we also performed a washing task in a real environment for the validity of the proposed system.
Section 6 concludes this paper and discusses future work.
3. Configuration of the Aerial Robot System
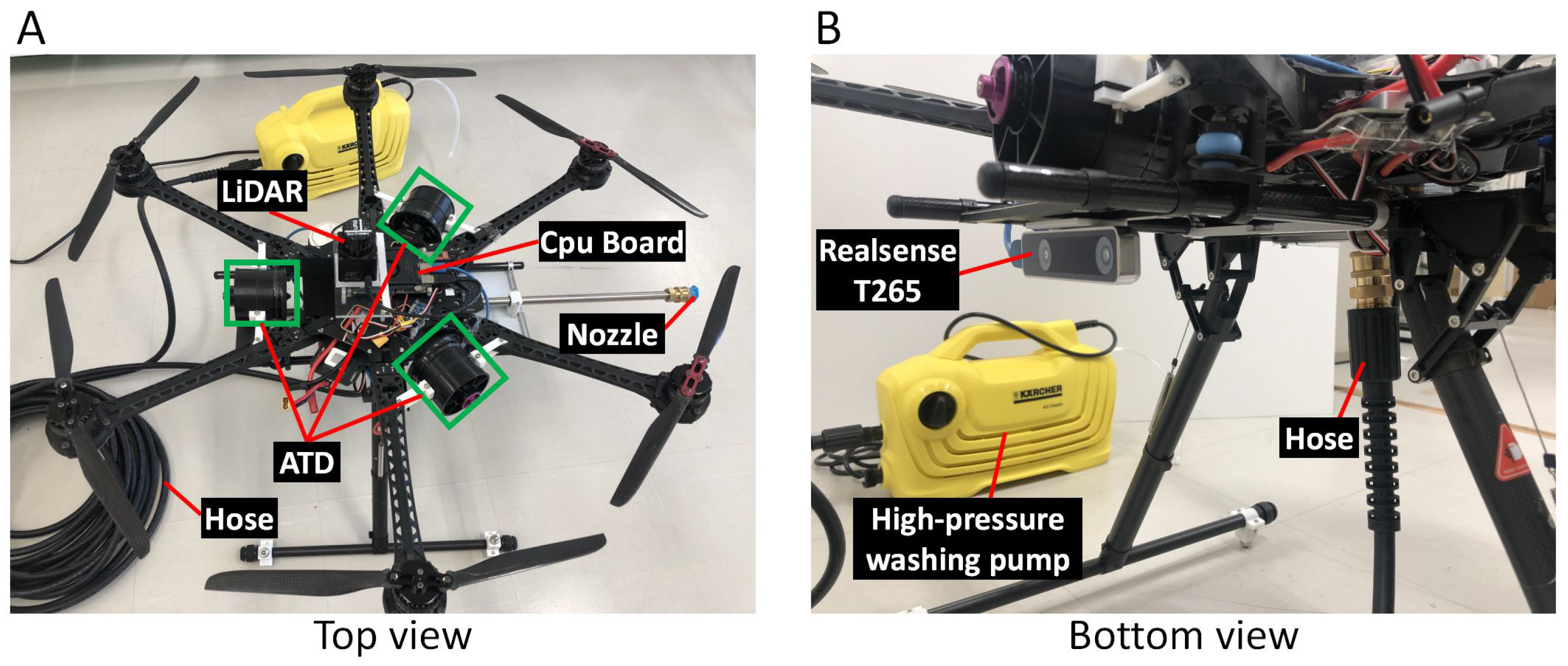
The proposed aerial robot is shown in
Figure 5. The robot consists of a multirotor platform, an onboard computer with sensors (a LiDAR and a stereo camera), and a high-pressure washing system; the ATD module, described in
Section 2, is mounted on the multirotor, as shown in
Figure 5A. The multirotor platform used is a DJI S800 (DJI, Guangzhou, China) airframe with a DJI A3 (DJI, Guangzhou, China) flight controller. The frame diameter of the airframe and propeller is 0.8 m and 0.38 m, respectively. The onboard computer is a LattePanda Alpha 864 (DFRobot, Shanghai, China), which is used to control the multirotor, ATD, and position estimation. The multirotor is equipped with a Realsense T265 stereo camera for multirotor position feedback. The LiDAR used is a URG-04LX-UG01 for detecting the washing target surface and the angle between the multirotor and wall. The nozzle lance is fixed with the roll direction of the multirotor, and the water supply hose is designed to be connected to another side of the turbo nozzle lance, as shown in the right figure of
Figure 5B.
The proposed aerial robot system was constructed as shown in
Figure 6. The control system of the multirotor and the ATD are designed to be operable from the RC transmitter via the onboard computer. The flight controller and the onboard computer communicate via SDK. It allows the flight status to be received from the flight controller and sends control commands from the onboard computer. Control inputs to the multirotor include roll angle
, pitch angle
, yaw angular velocity
, throttle
, and brake functions
. The ATD is equipped with an I2C interface (PCA9685), which receives control input from the onboard computer and controls the ducted fans through ESC. The low level control system is constructed based on Equations (1)–(5) and is designed so that ATD control can be achieved by providing input thrust in the roll and pitch directions only (
). Thus, we designed flight control modes by using the above-mentioned control inputs, and can be handled by a switch in the RC transmitter, namely normal control mode and ATD control mode. These control modes are described as follows:
Normal control mode: It allows the operator to control the multirotor manually, which is the same as typical operation. Control inputs of the multirotor with ATD can be given as follows
ATD control mode: It allows the operator to control the multirotor semi-autonomously and translate it with the fixed attitude of the airframe. The ATD controller is designed based on the RC input of joysticks and sensor feedback (LiDAR or stereo camera) for operating the multirotor and keeping a constant distance between the multirotor and the washing target. A brake function of ATD is designed by using velocity data from the stereo camera to stop the multirotor immediately after the operation. Furthermore, a reasonable fixed input value is added to the ATD controller in order to suppress the reaction force during water injection. The control inputs of the multirotor with ATD can be given as follows.
In Equations (6) and (7),
is the input value of the control stick from the RC transmitter converted to a range of
. In Equation (
6),
and
are parameters to make the input range of the RC transmitter correspond to the maximum output range of the multirotor. The parameters were set to enable input of a maximum of 25 deg in the roll and pitch directions and a maximum of 2 m/s in the vertical direction. In Equation (
7),
and
are the control gain of the PD controller on the yaw axis and decided to be experimental.
can be calculated by the IMU sensor from the flight controller or LiDAR sensing.
is an input value to suppress the reaction force during water jetting. Based on the force measurement results shown in
Figure 3B and
Figure 4D, we set
to generate a thrust force of 3 to 5 N during water jetting.
indicates the error between the target position and the current position (same direction as water jetting), which can be calculated by odometry of a stereo camera or LiDAR sensing. To keep the multi-rotor at its current height when not in operation, we designed position error
, which is in the vertical direction as follows.
In Equation (
8),
and
show the target position and the current position in the vertical direction, respectively.
4. Sensing System for Position Control
To control the multirotor semi-autonomously, the sensor feedback from the LiDAR (see
Figure 5A) and the stereo camera (see
Figure 5B) can be used. If the washing target is a wall, LiDAR can be used to find its angle and the distance to the wall in front of the UAV. However, the LiDAR can not work correctly if the washing target has the property of being reflective or passing light such as glass or metals. In this case, odometry data from the stereo camera can be used if the initial positional relationship between the multirotor and the washing target is known.
In the case of using LiDAR, the data from the LiDAR is obtained in the form of a 1D array. The array size depends on the angular resolution and view angle of the LiDAR. Each of the array elements corresponds to the distance from the center of the LiDAR to the object at that particular angle in meters. In this study, we used URG-04LX-UG01 (Hokuyo, Japan), with an angular resolution of 0.352 degrees and a total view range of 240 degrees. It is capable of detecting objects from 0.02 to 4 m at 1 mm accuracy. If the distance at a given angle is more than 4 m, the value will be represented as infinity. These values are filtered and removed to obtain only the object distance in the visible range. It is difficult to process the data in 1D form, and, therefore, they are converted into points in a 2D plane using a 2D rotation matrix.
To obtain the information about the wall, it is necessary to detect and separate the wall from the obtained LiDAR data. We assume that when the algorithm starts, the wall is in front of the UAV because the operator activates the wall detection algorithm when it is actually in front of a wall and needs to be turned off otherwise. According to this assumption, segmentation is performed considering the point directly in front of the UAV as one of the points in the wall, moving to the points to the right from that seed point. By computing the distance between the neighboring points, it is decided whether to include the point in the segment or not. When a discontinuity is found, the procedure is repeated again, this time from the seed point to the points to its left. Once the visible wall segment is detected in the data, a linear least square fit is performed on the segmented data to fit a line onto it. This is assuming the detected wall segment is flat, and no other walls are connected to it in the visible range of the LiDAR data.
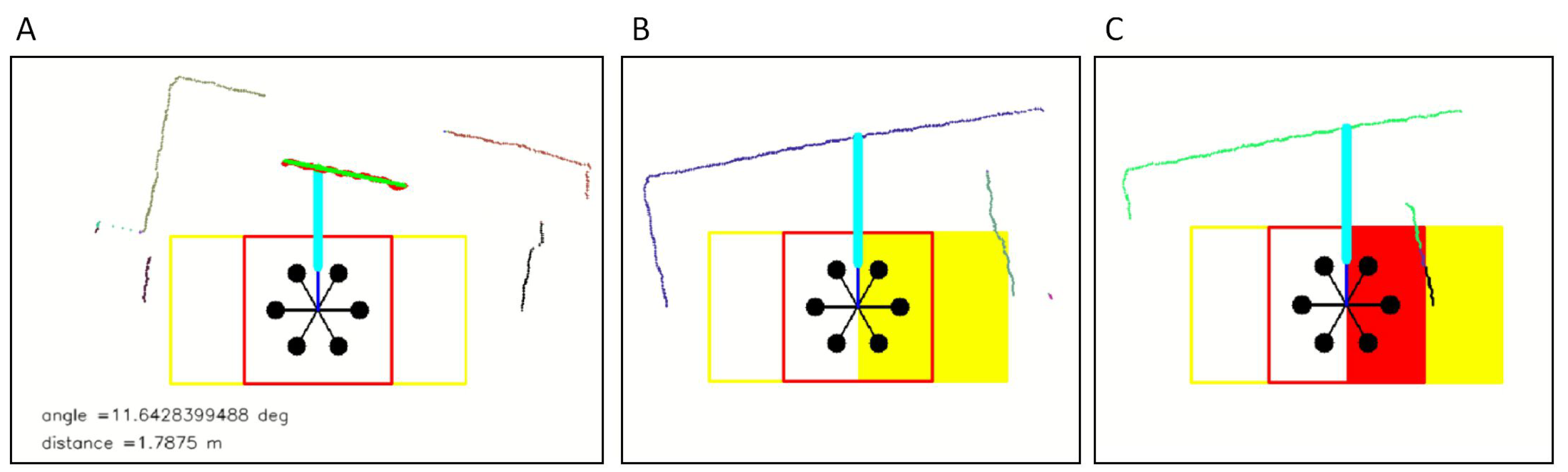
From the fitted line it is possible to find its angle and the distance to the wall (line segment) in front of the UAV. This information is necessary to angle the UAV and maintain the distance during washing. The results of these processes are shown in
Figure 7.
However, in addition to the information about the wall, it is necessary to sense the obstacle around the UAV to avoid a crash. In order to do that, a rectangular region around the UAV is considered called the ‘warning region’ (2 m × 1 m). The size of the region depends on the size of the UAV. The width is considered wider than the height because the UAV moves sideways during washing and requires monitoring in sideward directions. If there are any obstacles sensed in this region (see
Figure 7B), the UAV can be automatically controlled to move in the opposite direction. Another region, smaller than the above-mentioned region, is used as the ‘critical region’ (1 m × 1 m). If there are any obstacles in this region (see
Figure 7C), the UAV is immediately made to halt to avoid a crash. The operator can take control over the UAV.
On the other hand, in the case of using the stereo camera, we used sensor feedback from the camera mounted on the bottom of the multirotor. In this study, we used a Realsense T265 camera. It includes two fisheye lens’, an image sensor, IMU sensor BMI055(Bosch, Germany) and Intel Movidius Myriad 2 VPU(Intel, America), and an optimized V-SLAM algorithm. Through the Intel Realsense SDK, we can get the odometry and IMU data. By measuring the distance between the wall and the initial position of the multirotor, we can estimate the current distance and angle to the wall while flying.
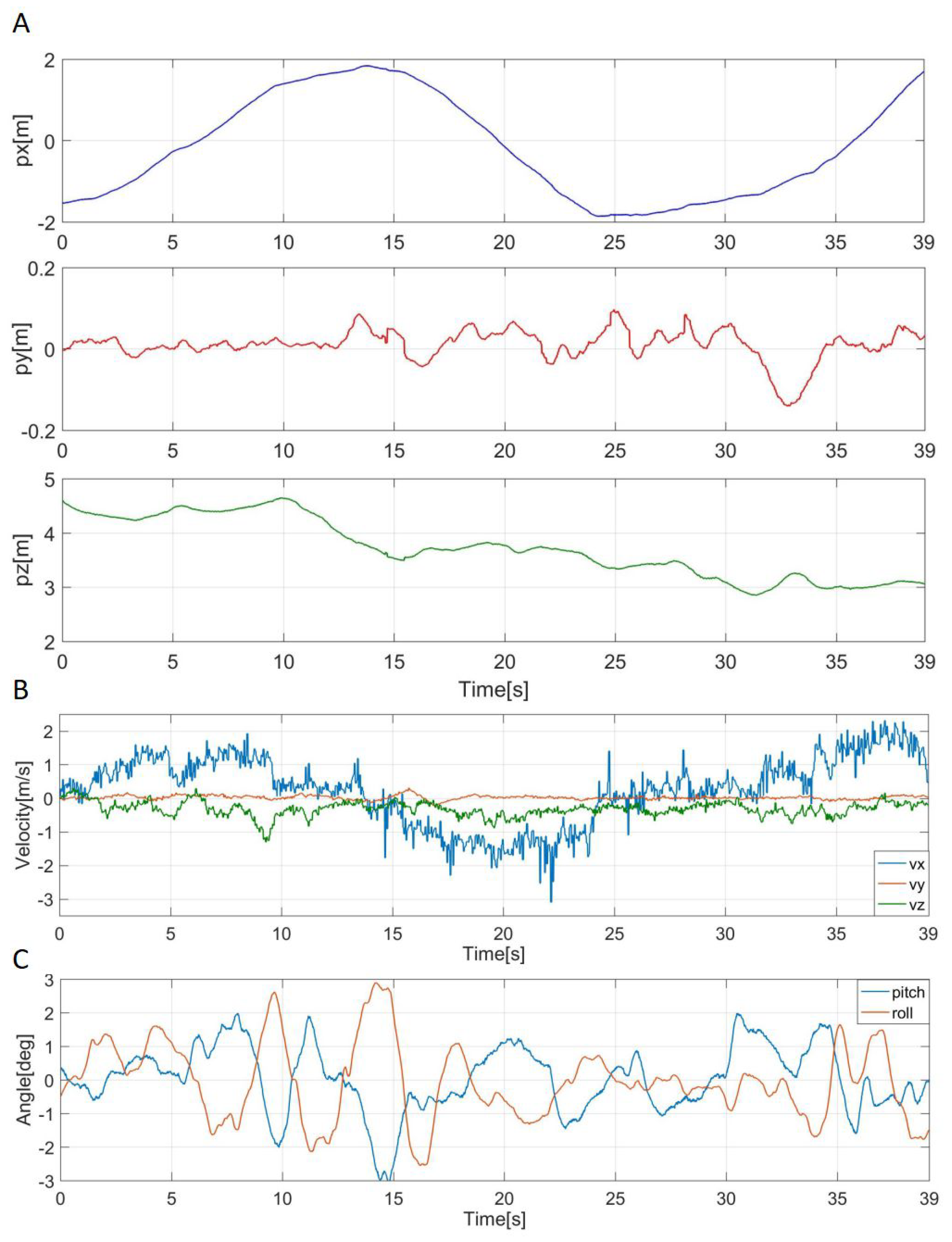
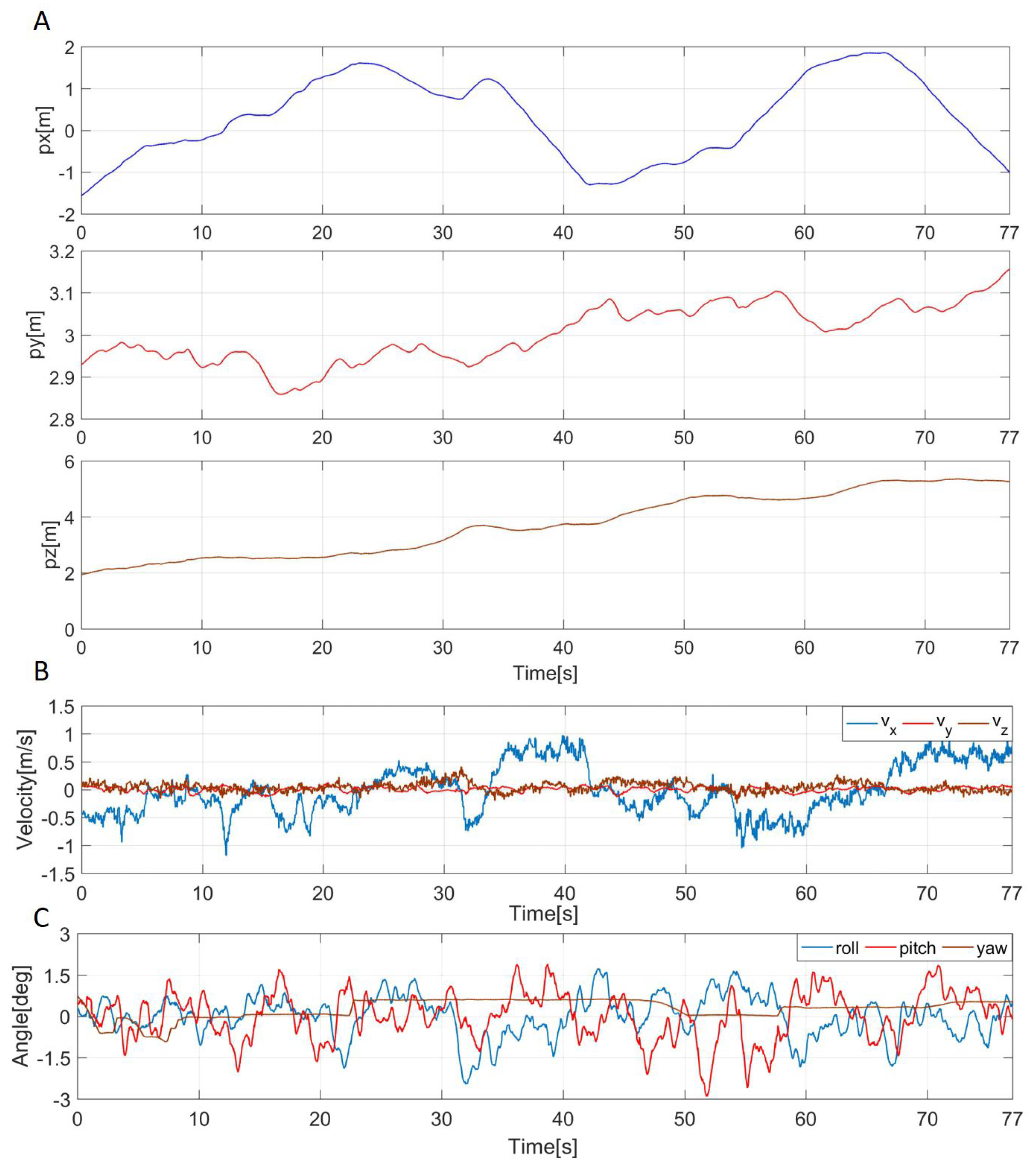
To verify the effectiveness while using LiDAR and the stereo camera as sensor feedback, we perform indoor experiments, as shown in
Figure 8. The multirotor was controlled to keep a constant distance to the wall, and it was set to 1.6 m. The heading direction of the multirotor was set to stay vertical to the wall, and we operated the multirotor to move to the right (see
Figure 8). In the experiment, we used LiDAR feedback at first and repeated the same experiment by using camera feedback. The experimental results are shown in
Figure 9. In the case of using LiDAR (see
Figure 9A), the position error was in ±0.05 m, and there was an error of about 0.05 m with the camera that took measurements at the same time. In addition, the multirotor was able to move while remaining perpendicular to the wall within an error range of about ±1 deg. The angle estimated from the IMU sensor had an error of about ±1 deg compared to the LiDAR but showed similar behavior. On the other hand, in the case of using camera feedback (see
Figure 9B), the experimental results are similar to the case of using LiDAR feedback. Through the experiment, we verified that both the LiDAR and camera feedback can be used for multirotor control, and it worked as expected.
Table 2 shows the pros and cons of different parameters of the two sensor systems used for testing.
6. Discussions and Conclusions
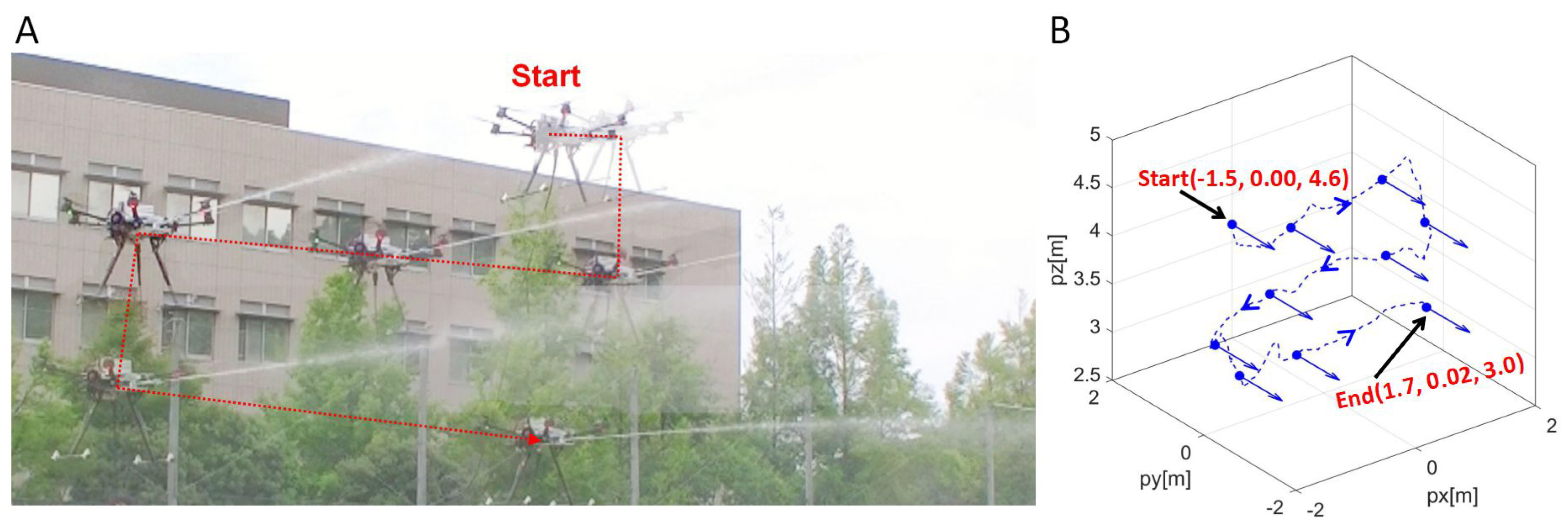
In this study, we proposed the application of a multirotor system to a high-pressure washing task. To achieve this, it is necessary to suppress the reaction force generated by the nozzle of the high-pressure washer while accurately spraying water. In order to solve these problems, we proposed a method of mounting an Add on Planar Translational Driving System (ATD) on a multirotor. By using the ATD, it allows the multirotor to move while maintaining a horizontal posture and to spray water accurately. In addition, the reaction force during water injection can be suppressed by the driving force of the ATD. Based on the proposed method, the force acting on the multirotor and the washing force during water jetting was measured. Then the ATD was developed based on the measurement results, and we measured the thrust of the ducted fan and confirmed that the reaction force of the water jet was within the range of the driving force of the ATD. Finally, the ATD and the nozzle of the high-pressure washer were mounted on the multirotor to construct the system. The sensing system was constructed using LiDAR and stereo cameras, and indoor experiments were conducted to verify the effectiveness of the sensor feedback. In the flight experiment, water jetting was performed while flying the multirotor in ATD flight mode, and it was confirmed that the aircraft could move while maintaining a horizontal attitude and, at the same time, suppressing the reaction force. Further demonstrations were conducted, and it was confirmed that the washing task can be performed while maintaining a constant distance and vertically facing the wall surface. Thus, the validity of the application of the proposed method to high-pressure washing tasks was verified.
In this study, we applied the multirotor system to a high-pressure washing task semi-autonomously. However, the motion planning and automation for mapping, positioning, and flying along the target trajectory for walls of various shapes will be future tasks. On the other hand, it was confirmed that the non-uniformity of wind velocity distribution during the washing task affects the positioning accuracy, and the robustness of the position control should be improved in the future. Meanwhile, we used stereo cameras and LiDAR separately depending on the situation, but by integrating these sensing data, it is possible to obtain more stable sensor feedback. On the other hand, in the flight experiment, for the length of the hose, the position of the UAV was not so far from the tank on the ground, and the hose was vertical; i.e., the hose extended straight down from the UAV to the ground and thence to the tank. Therefore, there was no significant hindrance to the UAV’s lateral movement or attitude maintenance. However, if the hose is more distant from the tank and at an angle, the UAV’s movement would be affected. This is an issue to be addressed in the future. If an automatic aerial high-pressure washing task is realized, it also can be used for fire extinguishing and painting operations, expanding the range of applications.


 ,
, 















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}