
Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. The Methodology of Modified EDAM [32]
- First, we carry out a variable transformation , , where there are several ways to describe .Thus, (6) is changed by this transformation to a nonlinear ODE of the following form:where in (7) has derivatives with respect to . Sometimes, the constant(s) of integration may then be obtained by integrating (7) a single time or more.
- Then, we assume that (7) has the following solution:where are unknown constants to be estimated later, and satisfies the following nonlinear first order ODE:where are arbitrary constants and .
- Finding the homogeneous balance among the greatest nonlinear term and the highest order derivative in (7) yields the positive integer given in (8).
- Next, we plug (8) in (7) or in the integrated form of (7), and then all those terms of which have same orders are assembled, which yields a polynomial in . The obtained polynomial’s coefficients are then all set to zero, resulting in a system of algebraic equations for and additional parameters.
- To resolve this set of algebraic equations, we utilize MAPLE.
3. Application of mEDAM
Results
- Case 1:
- Case 2:where
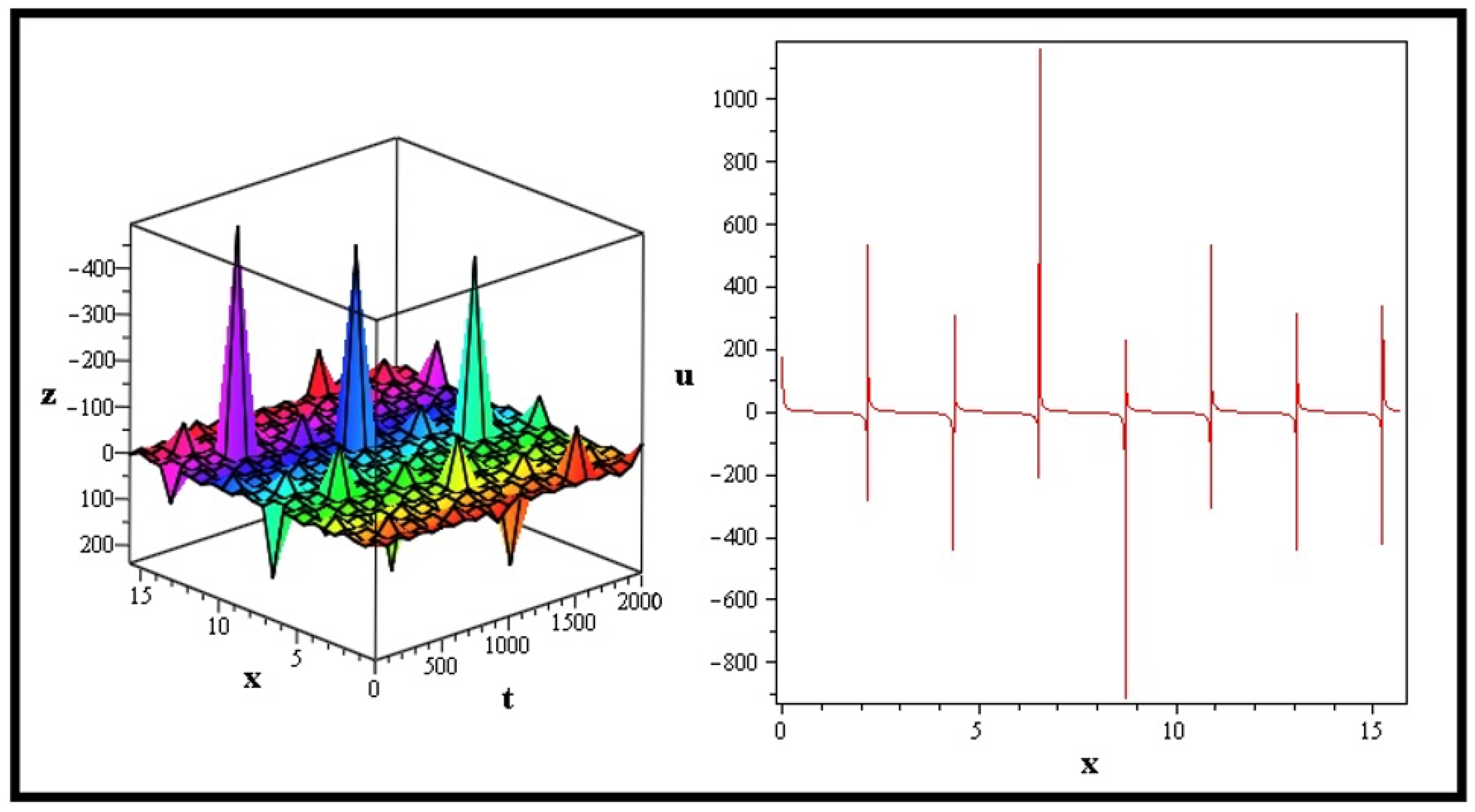
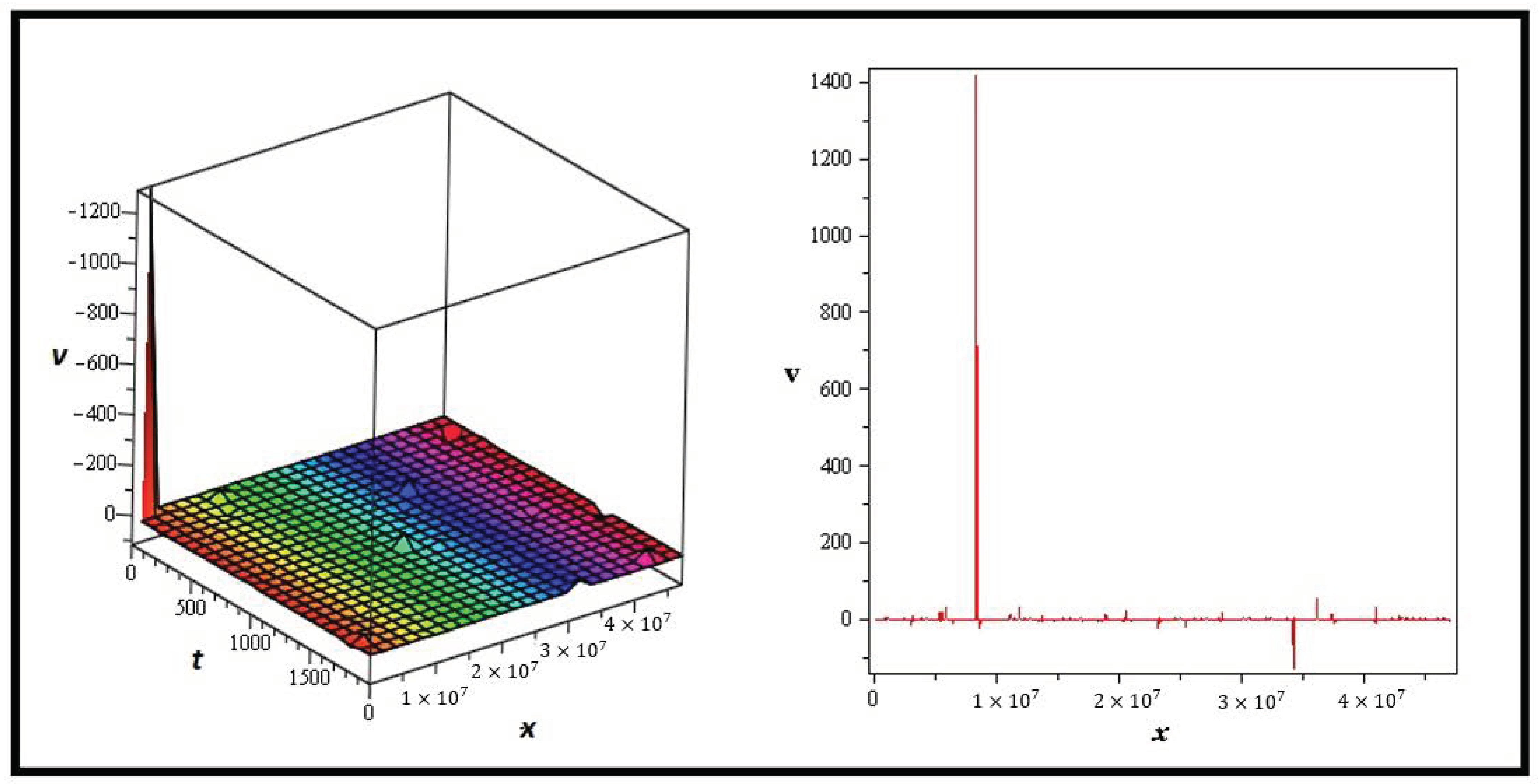
4. Discussion and Graphs
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Zayed, E.M.; Amer, Y.A.; Shohib, R.M. The fractional complex transformation for nonlinear fractional partial differential equations in the mathematical physics. J. Assoc. Arab. Univ. Basic Appl. Sci. 2016, 19, 59–69. [Google Scholar] [CrossRef] [Green Version]
- Sun, H.; Zhang, Y.; Baleanu, D.; Chen, W.; Chen, Y. A new collection of real world applications of fractional calculus in science and engineering. Commun. Nonlinear Sci. Numer. Simul. 2018, 64, 213–231. [Google Scholar] [CrossRef]
- Singh, J.; Kumar, D.; Kılıçman, A. Numerical solutions of nonlinear fractional partial differential equations arising in spatial diffusion of biological populations. Abstr. Appl. Anal. 2014, 2014, 535793. [Google Scholar] [CrossRef] [Green Version]
- Ara, A.; Khan, N.A.; Razzaq, O.A.; Hameed, T.; Raja, M.A.Z. Wavelets optimization method for evaluation of fractional partial differential equations: An application to financial modelling. Adv. Differ. Equ. 2018, 2018, 8. [Google Scholar] [CrossRef]
- Pan, S.; Lin, M.; Xu, M.; Zhu, S.; Bian, L.; Li, G. A Low-Profile Programmable Beam Scanning Holographic Array Antenna Without Phase Shifters. IEEE Internet Things J. 2022, 9, 8838–8851. [Google Scholar] [CrossRef]
- Zhao, C.; Cheung, C.F.; Xu, P. High-efficiency sub-microscale uncertainty measurement method using pattern recognition. ISA Trans. 2020, 101, 503–514. [Google Scholar] [CrossRef]
- Jin, H.Y.; Wang, Z.A. Global stabilization of the full attraction-repulsion Keller-Segel system. Discret. Contin. Dyn. Syst.-Ser. A 2020, 40, 3509–3527. [Google Scholar] [CrossRef] [Green Version]
- Lyu, W.; Wang, Z. Global classical solutions for a class of reaction-diffusion system with density-suppressed motility. Electron. Res. Arch. 2022, 30, 995–1015. [Google Scholar] [CrossRef]
- Zhang, J.; Xie, J.; Shi, W.; Huo, Y.; Ren, Z.; He, D. Resonance and bifurcation of fractional quintic Mathieu–Duffing system. Chaos Interdiscip. J. Nonlinear Sci. 2023, 33, 23131. [Google Scholar] [CrossRef]
- El-Sheikh, M.M.A.; Ahmed, H.M.; Arnous, A.H.; Rabie, W.B. Optical solitons and other solutions in birefringent fibers with Biswas–Arshed equation by Jacobi’s elliptic function approach. Optik 2020, 202, 163546. [Google Scholar] [CrossRef]
- Pandir, Y.; Ekin, A. New solitary wave solutions of the Korteweg-de Vries (KdV) equation by new version of the trial equation method. Electron. J. Appl. Math. 2023, 1, 101–113. [Google Scholar]
- Meerschaert, M.M.; Tadjeran, C. Finite difference approximations for two-sided space-fractional partial differential equations. Appl. Numer. Math. 2006, 56, 80–90. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, F.; Anh, V. Galerkin finite element approximation of symmetric space-fractional partial differential equations. Appl. Math. Comput. 2010, 217, 2534–2545. [Google Scholar] [CrossRef]
- Wu, J.L. A wavelet operational method for solving fractional partial differential equations numerically. Appl. Math. Comput. 2009, 214, 31–40. [Google Scholar] [CrossRef]
- Momani, S.; Odibat, Z. A novel method for nonlinear fractional partial differential equations: Combination of DTM and generalized Taylor’s formula. J. Comput. Appl. Math. 2008, 220, 85–95. [Google Scholar] [CrossRef]
- Ziane, D.; Cherif, M.H. Variational iteration transform method for fractional differential equations. J. Interdiscip. Math. 2018, 21, 185–199. [Google Scholar] [CrossRef]
- Khan, H.; Baleanu, D.; Kumam, P.; Al-Zaidy, J.F. Families of travelling waves solutions for fractional-order extended shallow water wave equations, using an innovative analytical method. IEEE Access 2019, 7, 107523–107532. [Google Scholar] [CrossRef]
- Manafian, J.; Foroutan, M. Application of tan(ϕ(ξ)/2)-expansion method for the time-fractional Kuramoto–Sivashinsky equation. Opt. Quantum Electron. 2017, 49, 272. [Google Scholar] [CrossRef]
- Zheng, B. Exp-function method for solving fractional partial differential equations. Sci. World J. 2013, 2013, 465723. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Younis, M.; Iftikhar, M. Computational examples of a class of fractional order nonlinear evolution equations using modified extended direct algebraic method. J. Comput. Methods Sci. Eng. 2015, 15, 359–365. [Google Scholar] [CrossRef]
- Qi, M.; Cui, S.; Chang, X.; Xu, Y.; Meng, H.; Wang, Y.; Arif, M. Multi-region Nonuniform Brightness Correction Algorithm Based on L-Channel Gamma Transform. Secur. Commun. Netw. 2022, 2022, 2675950. [Google Scholar] [CrossRef]
- Guo, F.; Zhou, W.; Lu, Q.; Zhang, C. Path extension similarity link prediction method based on matrix algebra in directed networks. Comput. Commun. 2022, 187, 83–92. [Google Scholar] [CrossRef]
- Song, J.; Mingotti, A.; Zhang, J.; Peretto, L.; Wen, H. Accurate Damping Factor and Frequency Estimation for Damped Real-Valued Sinusoidal Signals. IEEE Trans. Instrum. Meas. 2022, 71, 6503504. [Google Scholar] [CrossRef]
- Liu, H.; Li, J.; Meng, X.; Zhou, B.; Fang, G.; Spencer, B.F. Discrimination between Dry and Water Ices by Full Polarimetric Radar: Implications for China’s First Martian Exploration. IEEE Trans. Geosci. Remote. Sens. 2022, 61, 5100111. [Google Scholar] [CrossRef]
- Fu, Q.; Si, L.; Liu, J.; Shi, H.; Li, Y. Design and experimental study of a polarization imaging optical system for oil spills on sea surfaces. Appl. Opt. 2022, 61, 6330–6338. [Google Scholar] [CrossRef] [PubMed]
- Li, Z. Bifurcation and traveling wave solution to fractional Biswas–Arshed equation with the beta time derivative. Chaos Solitons Fractals 2022, 160, 112249. [Google Scholar] [CrossRef]
- Ozkan, Y.S. On the exact solutions to Biswas–Arshed equation involving truncated M-fractional space-time derivative terms. Optik 2021, 227, 166109. [Google Scholar] [CrossRef]
- Zafar, A.; Bekir, A.; Raheel, M.; Razzaq, W. Optical soliton solutions to Biswas–Arshed model with truncated M-fractional derivative. Optik 2020, 222, 165355. [Google Scholar] [CrossRef]
- Hosseini, K.; Mirzazadeh, M.; Ilie, M.; Gomez-Aguilar, J.F. Biswas–Arshed equation with the beta time derivative: Optical solitons and other solutions. Optik 2020, 217, 164801. [Google Scholar] [CrossRef]
- Demiray, S.T. New solutions of Biswas–Arshed equation with beta time derivative. Optik 2020, 222, 165405. [Google Scholar] [CrossRef]
- Naeem, M.; Yasmin, H.; Shah, R.; Shah, N.A.; Chung, J.D. A Comparative Study of Fractional Partial Differential Equations with the Help of Yang Transform. Symmetry 2023, 15, 146. [Google Scholar] [CrossRef]
- Mirhosseini-Alizamini, S.M.; Rezazadeh, H.; Srinivasa, K.; Bekir, A. New closed form solutions of the new coupled Konno-Oono equation using the new extended direct algebraic method. Pramana 2020, 94, 52. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yasmin, H.; Aljahdaly, N.H.; Saeed, A.M.; Shah, R. Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique. Fractal Fract. 2023, 7, 491. https://doi.org/10.3390/fractalfract7070491
Yasmin H, Aljahdaly NH, Saeed AM, Shah R. Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique. Fractal and Fractional. 2023; 7(7):491. https://doi.org/10.3390/fractalfract7070491
Chicago/Turabian StyleYasmin, Humaira, Noufe H. Aljahdaly, Abdulkafi Mohammed Saeed, and Rasool Shah. 2023. "Investigating Families of Soliton Solutions for the Complex Structured Coupled Fractional Biswas–Arshed Model in Birefringent Fibers Using a Novel Analytical Technique" Fractal and Fractional 7, no. 7: 491. https://doi.org/10.3390/fractalfract7070491