

A Self-Similar Infinite Binary Tree Is a Solution to the Steiner Problem
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
- is compact.
- has, at most, a finite number of connected components, and each component has a strictly positive length.
- contains no loops (homeomorphic images of the circle ).
- The closure of every connected component of is a topological tree, which is a connected and locally connected compact set without loops. It has endpoints on A and, at most, many branching points. Each connected component of A has, at most, one endpoint on the tree, and all of the branching points have a finite number of branches leaving them.
- If A has a finite number of connected components, then has a finite number of connected components, the closure of each of which is a finite geodesic embedded graph with endpoints on A, and with, at most, one endpoint on each connected component of A.
- For every open set , such that , one has that the set is a subset of a finite geodesic embedded graph. Moreover, for a.e. , one has that for , the set is a finite geodesic embedded graph (in particular, it has a finite number of connected components and a finite number of branching points).
A Universal Steiner Tree
“Our proof requires that the sequence vanish rather quickly (in fact, at least be summable). It is an open question if in the case of a constant sequence (with small enough) the same construction still provides a Steiner tree. This seems to be quite interesting since the resulting tree would be, in that case, a self-similar fractal.”
2. Results
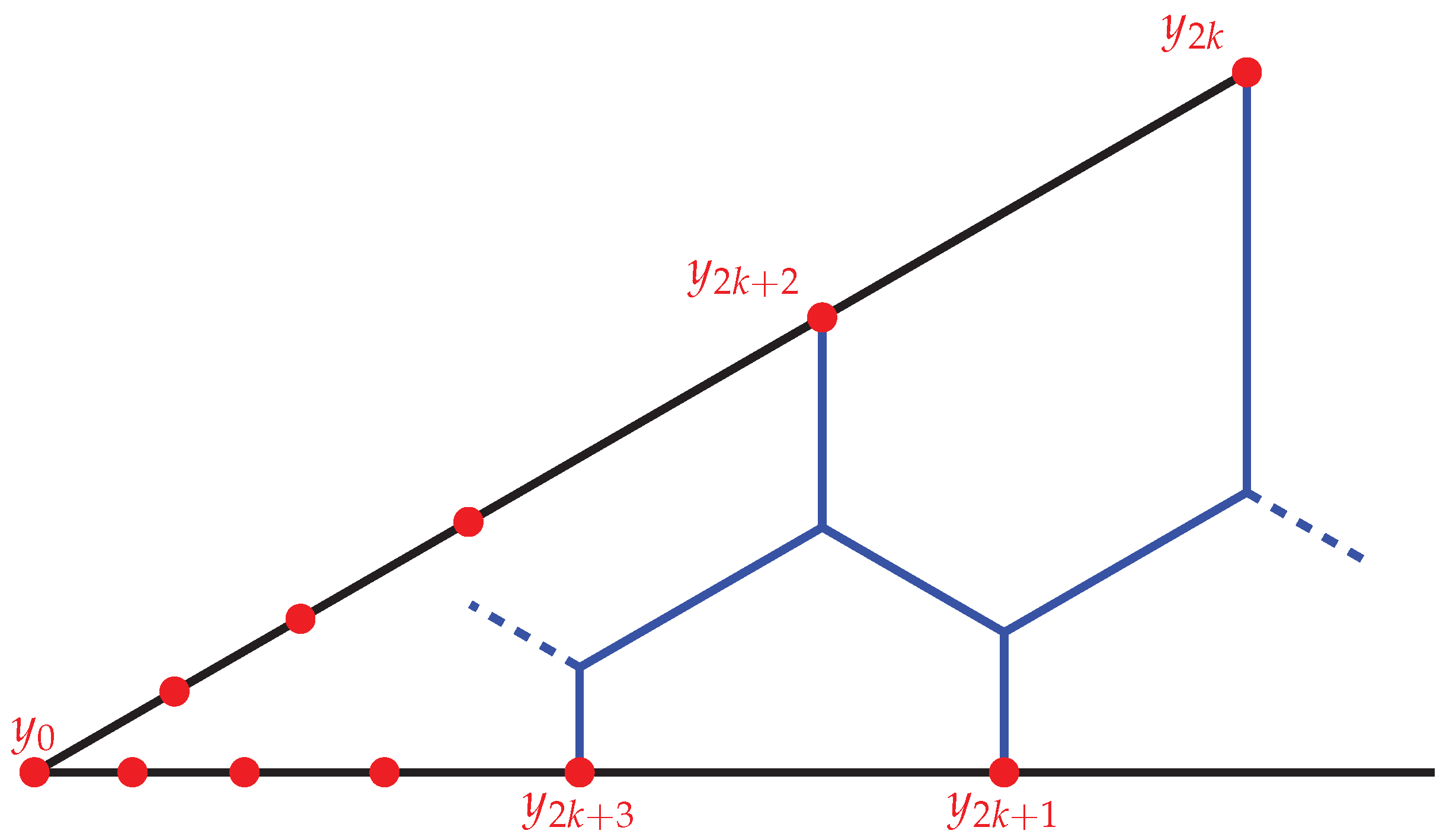
- (i)
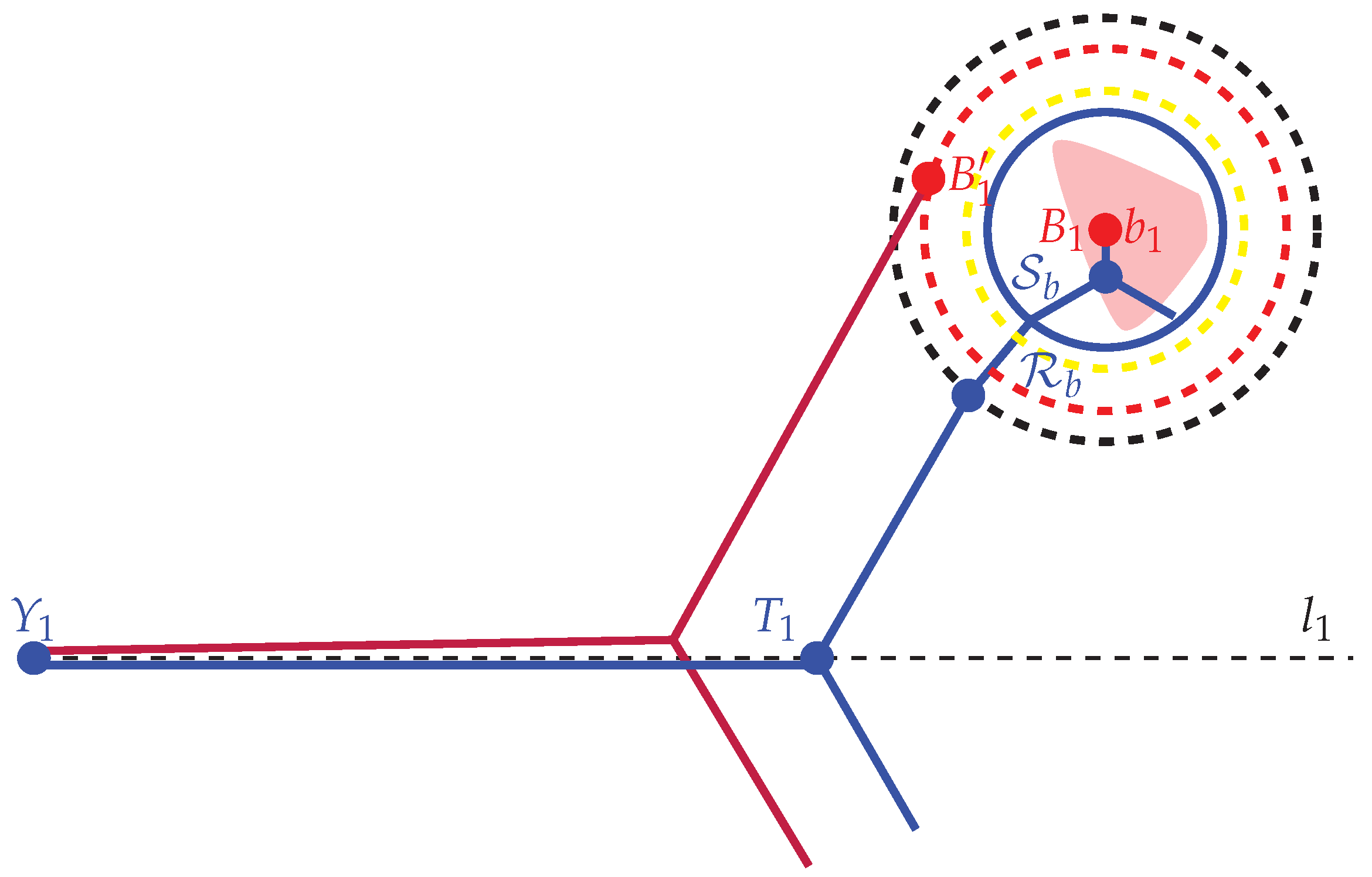
- For every , the set is a regular tripod.
- (ii)
- Every is a regular tripod outside of .
3. Conclusions
3.1. Recent Progress
3.2. Open Problems
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

References
- Paolini, E.; Stepanov, E. Existence and regularity results for the Steiner problem. Calc. Var. Partial. Differ. Equ. 2013, 46, 837–860. [Google Scholar] [CrossRef]
- Gilbert, E.N.; Pollak, H.O. Steiner minimal trees. SIAM J. Appl. Math. 1968, 16, 1–29. [Google Scholar] [CrossRef]
- Hwang, F.K.; Richards, D.S.; Winter, P. The Steiner Tree Problem; Elsevier: Amsterdam, The Netherlands, 1992; Volume 53. [Google Scholar]
- Morel, J.M.; Santambrogio, F. The regularity of optimal irrigation patterns. Arch. Ration. Mech. Anal. 2010, 195, 499–531. [Google Scholar] [CrossRef]
- Marchese, A.; Massaccesi, A. An optimal irrigation network with infinitely many branching points. ESAIM Control Optim. Calc. Var. 2016, 22, 543–561. [Google Scholar] [CrossRef]
- Goldman, M. Self-similar minimizers of a branched transport functional. Indiana Univ. Math. J. 2020, 69, 1073–1104. [Google Scholar] [CrossRef]
- Paolini, E.; Stepanov, E.; Teplitskaya, Y. An example of an infinite Steiner tree connecting an uncountable set. Adv. Calc. Var. 2015, 8, 267–290. [Google Scholar] [CrossRef]
- David, G.; Semmes, S. Fractured Fractals and Broken Dreams: Self-Similar Geometry through Metric and Measure; Oxford University Press: Oxford, UK, 1997; Volume 7. [Google Scholar]
- Paolini, E.; Stepanov, E. On the Steiner tree connecting a fractal set. arXiv 2023, arXiv:2304.01932. [Google Scholar]
- Paolini, E. Minimal connections: The classical Steiner problem and generalizations. Bruno Pini Math. Anal. Semin. 2012, 1, 72–87. [Google Scholar]





Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cherkashin, D.; Teplitskaya, Y. A Self-Similar Infinite Binary Tree Is a Solution to the Steiner Problem. Fractal Fract. 2023, 7, 414. https://doi.org/10.3390/fractalfract7050414
Cherkashin D, Teplitskaya Y. A Self-Similar Infinite Binary Tree Is a Solution to the Steiner Problem. Fractal and Fractional. 2023; 7(5):414. https://doi.org/10.3390/fractalfract7050414
Chicago/Turabian StyleCherkashin, Danila, and Yana Teplitskaya. 2023. "A Self-Similar Infinite Binary Tree Is a Solution to the Steiner Problem" Fractal and Fractional 7, no. 5: 414. https://doi.org/10.3390/fractalfract7050414