
A Non-Convex Hybrid Overlapping Group Sparsity Model with Hyper-Laplacian Prior for Multiplicative Noise

Abstract
:1. Introduction
2. Preliminaries
2.1. Second-Order TV
2.2. Overlapping Group Sparsity on Hyper-Laplacian Prior
3. Proposed Method with Adaptive Parameter Adjustment
| Algorithm 1: NHOGSHL for image restoration under multiplicative noise |
| Input: |
| Initialize: |
| While |
| (1): Update by solving (10); |
| (2): Update by solving (14); |
| (3): Update by solving (17); |
| (4): Update by solving (20); |
| (5): Update |
| Output |
4. Numerical Experiments
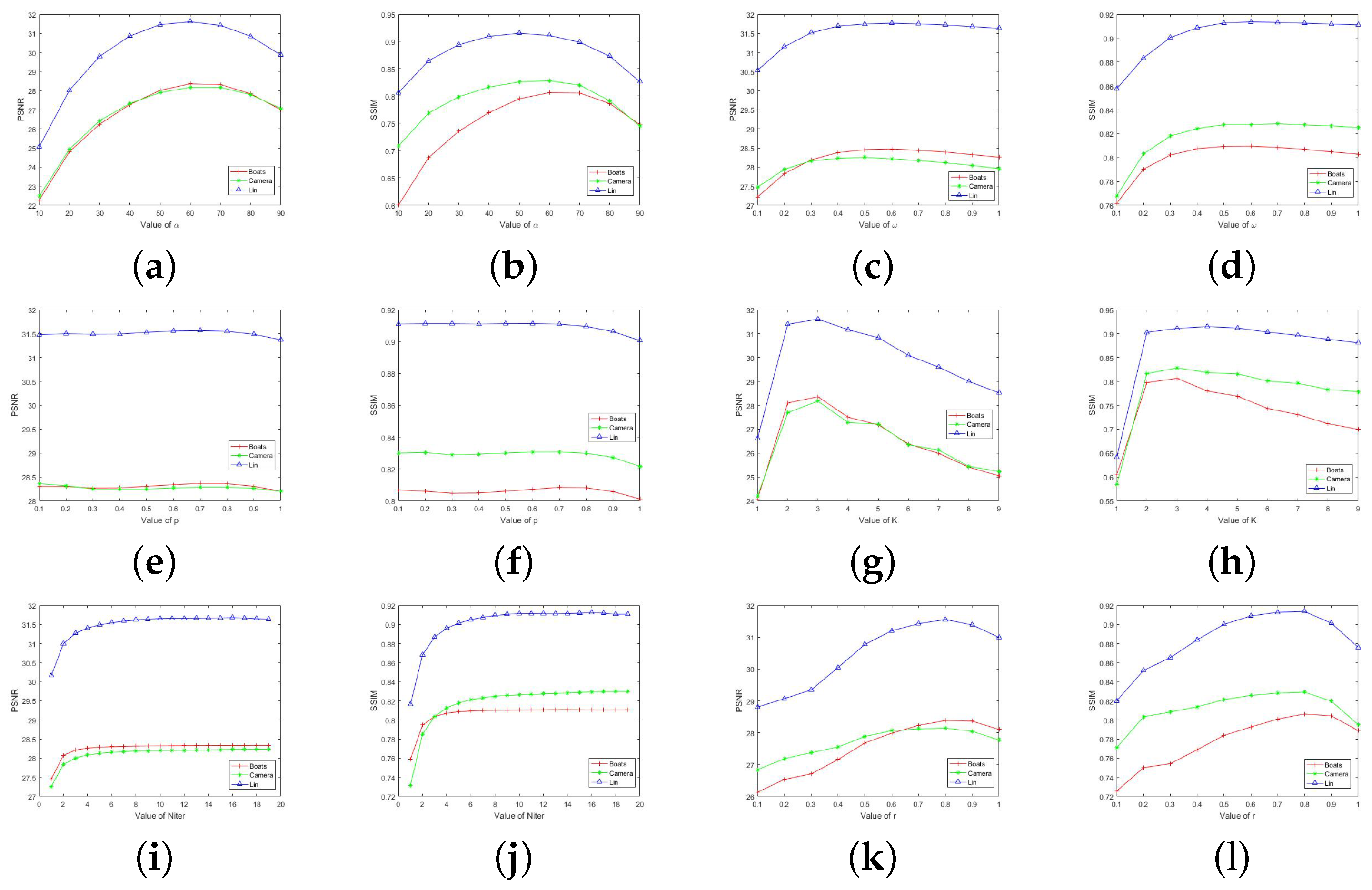
4.1. Parameters Setting
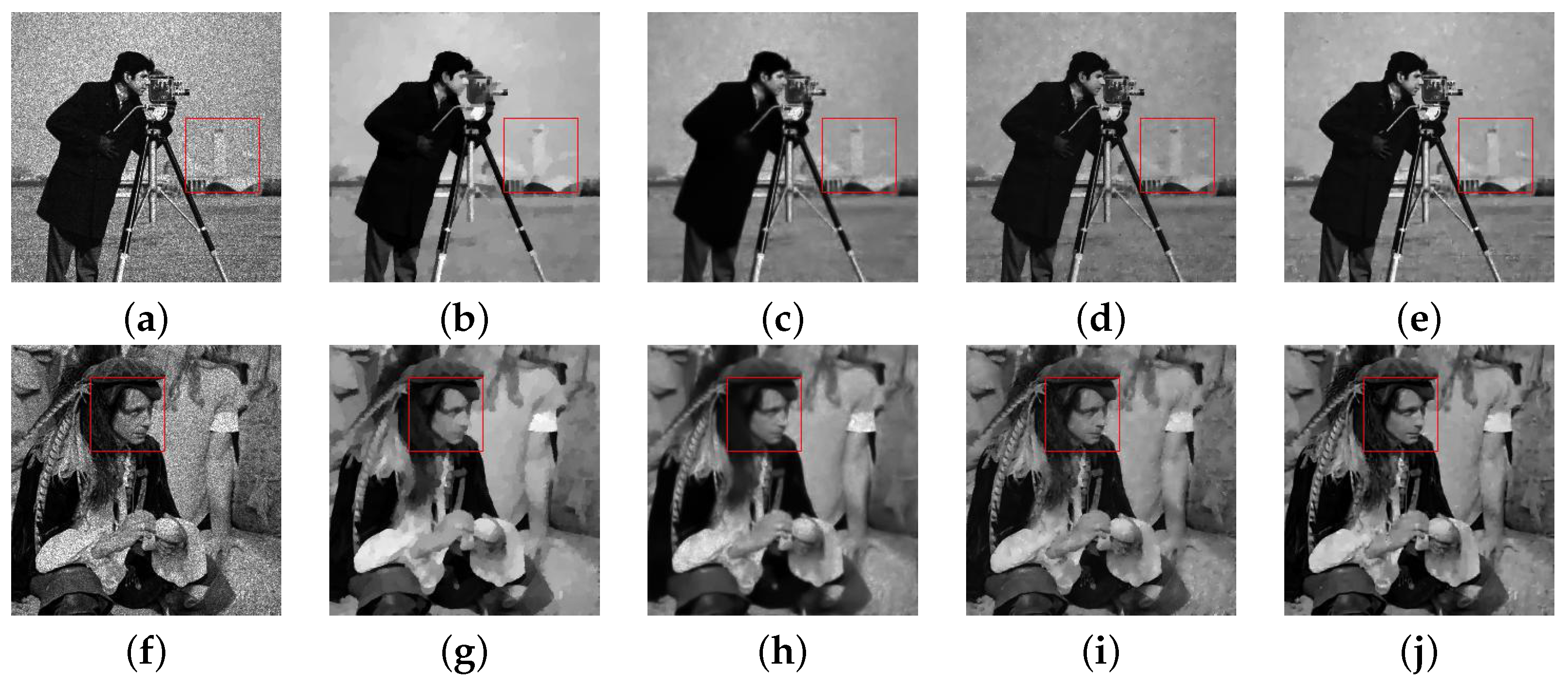
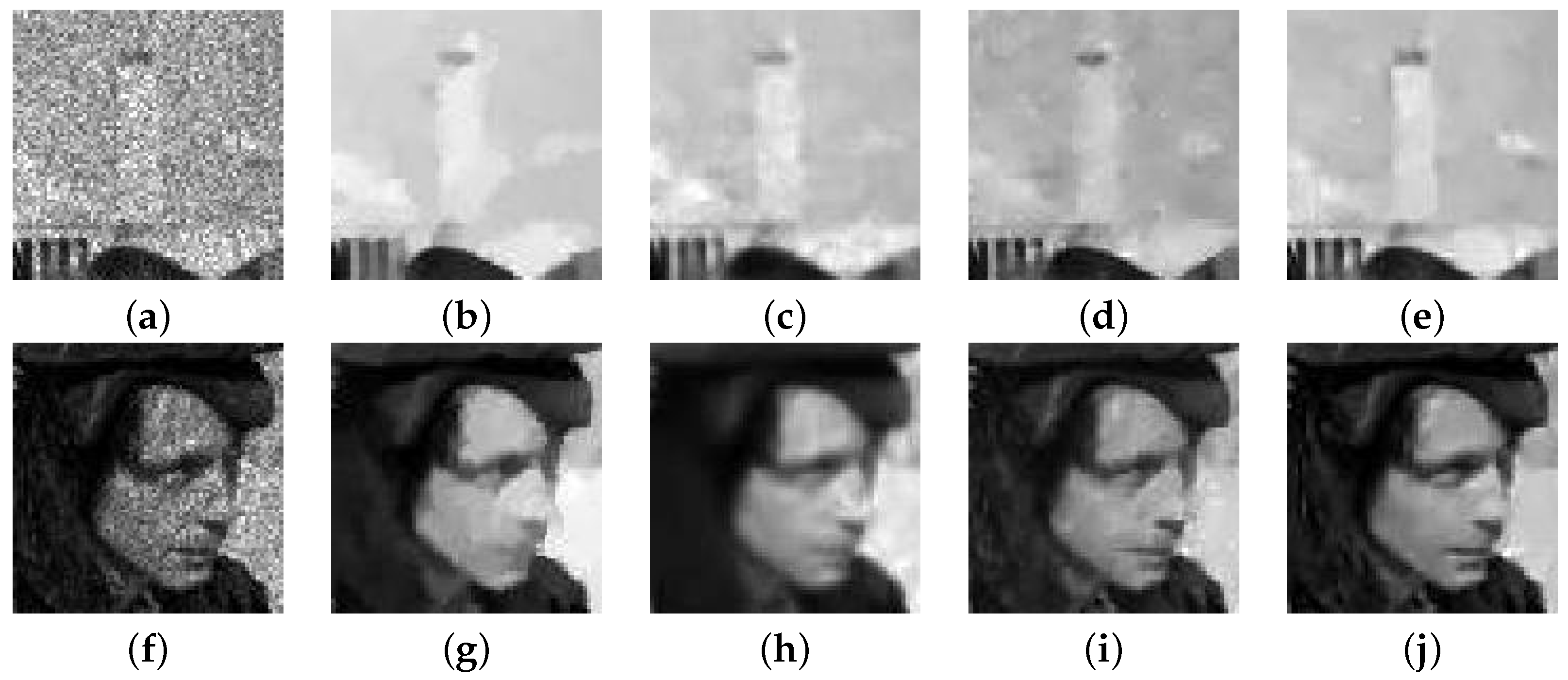
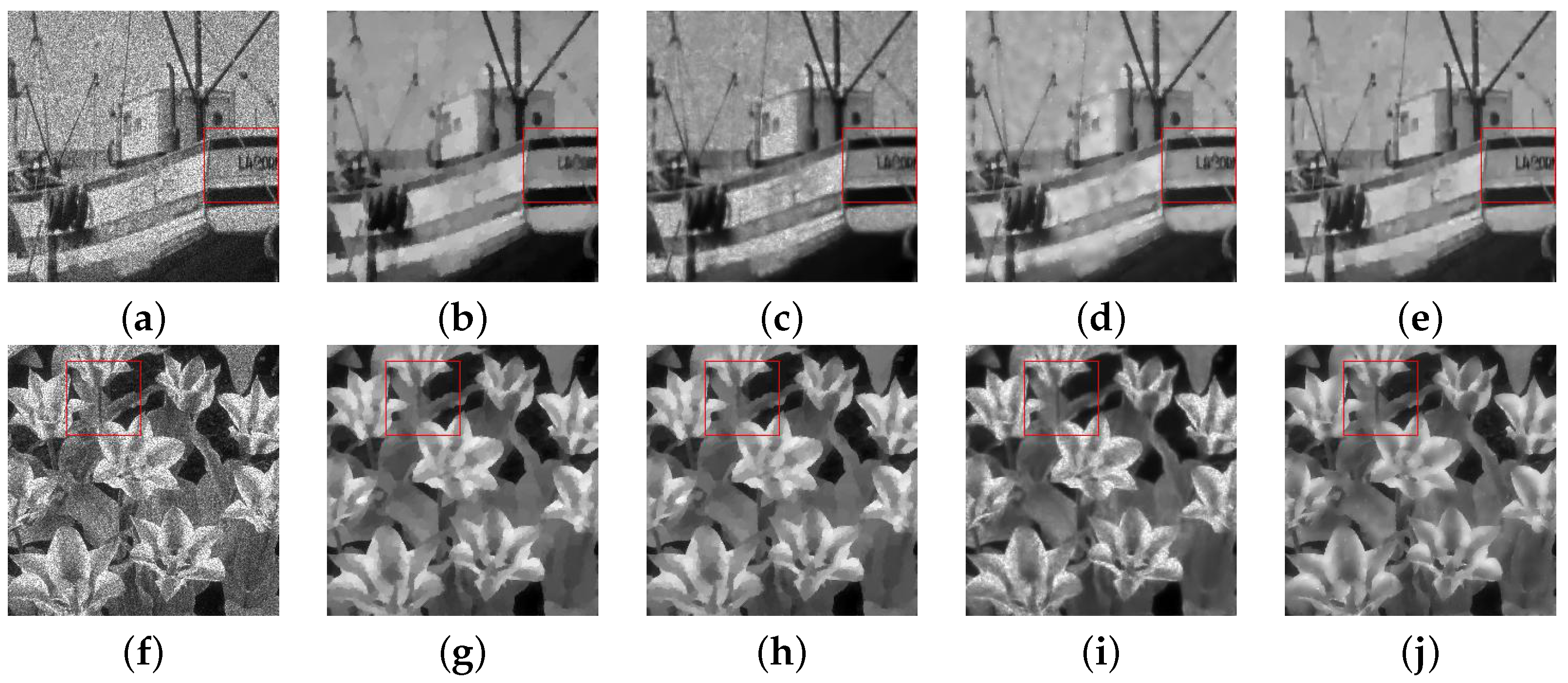
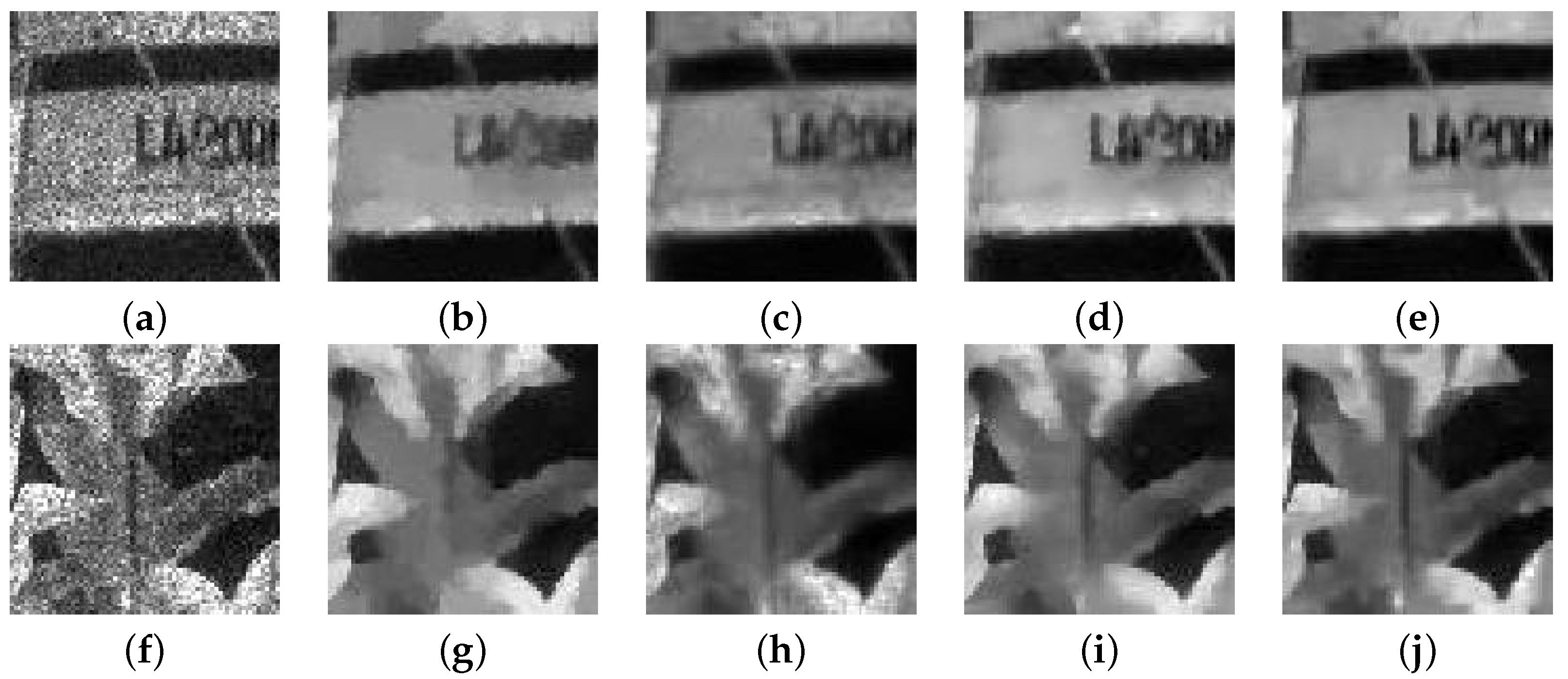
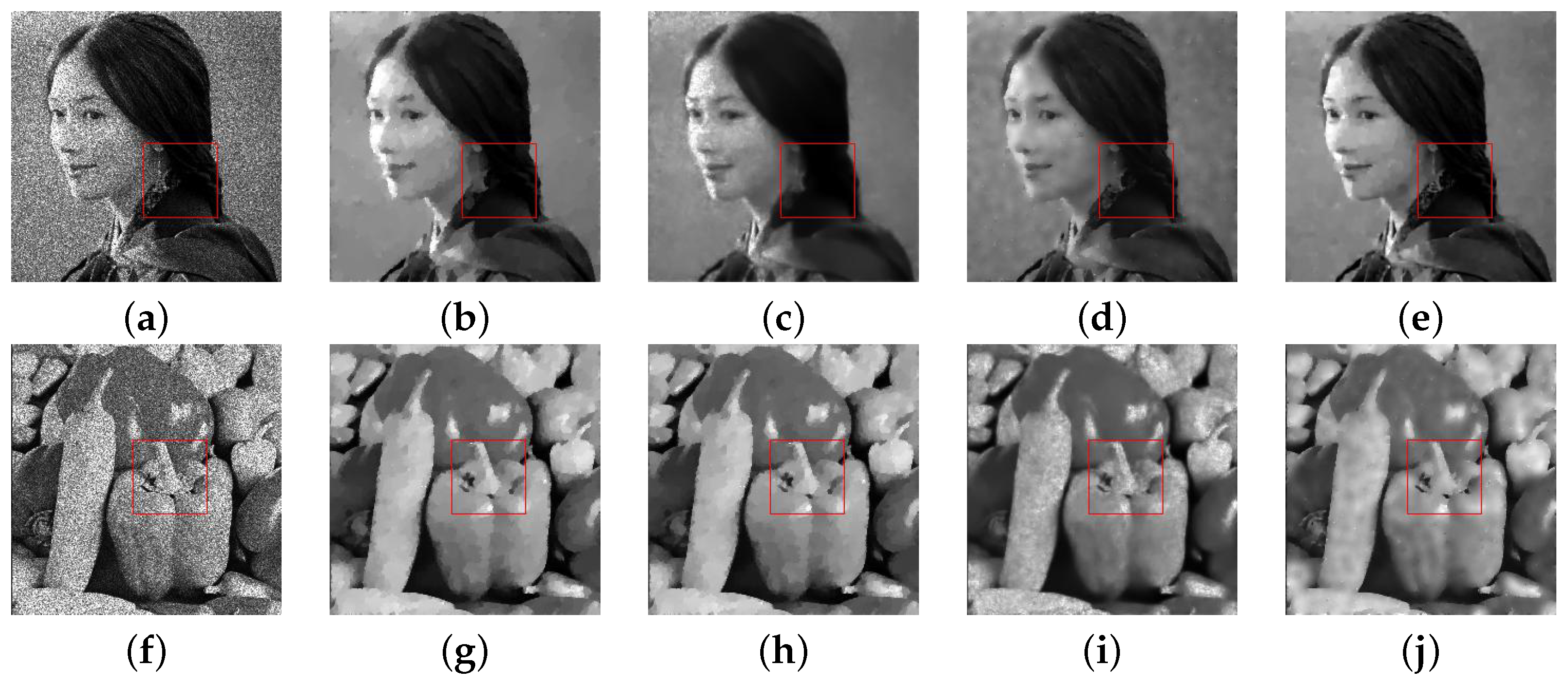
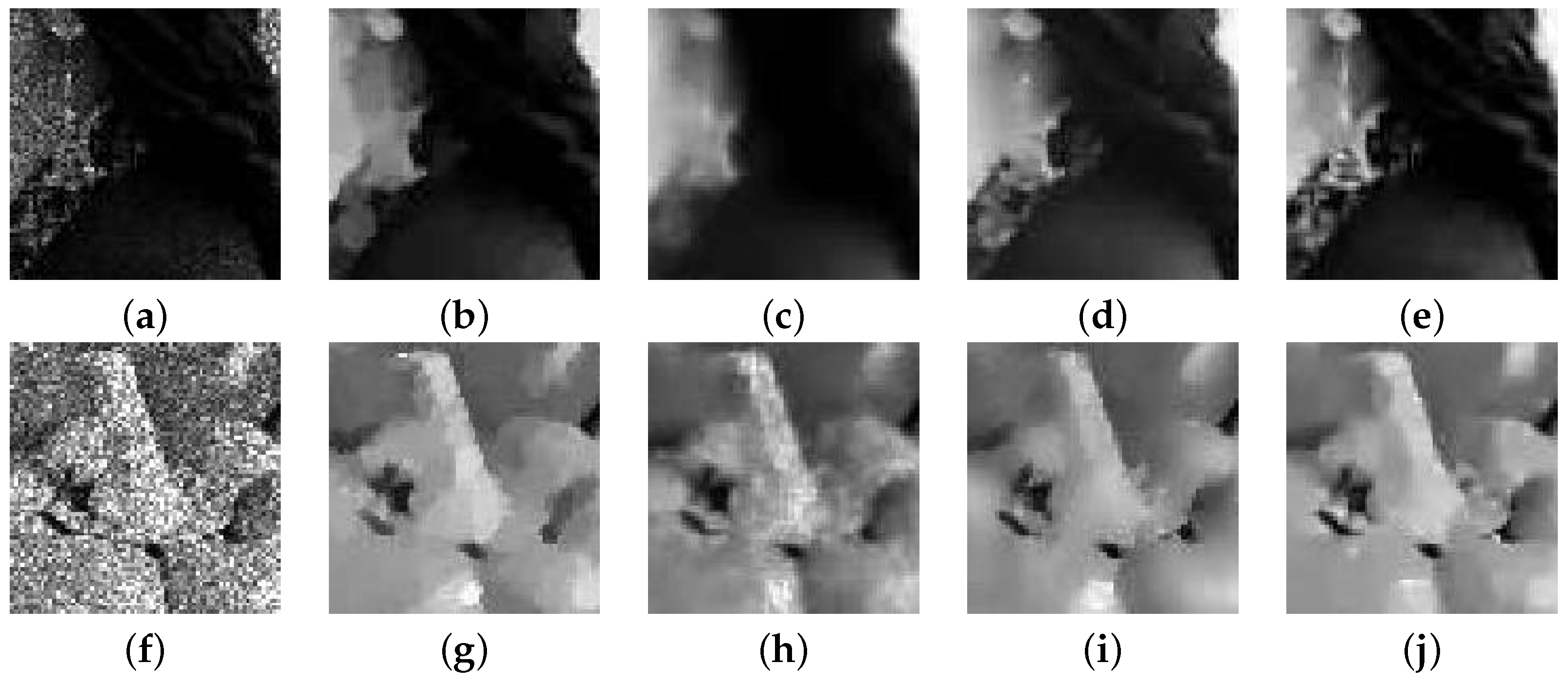
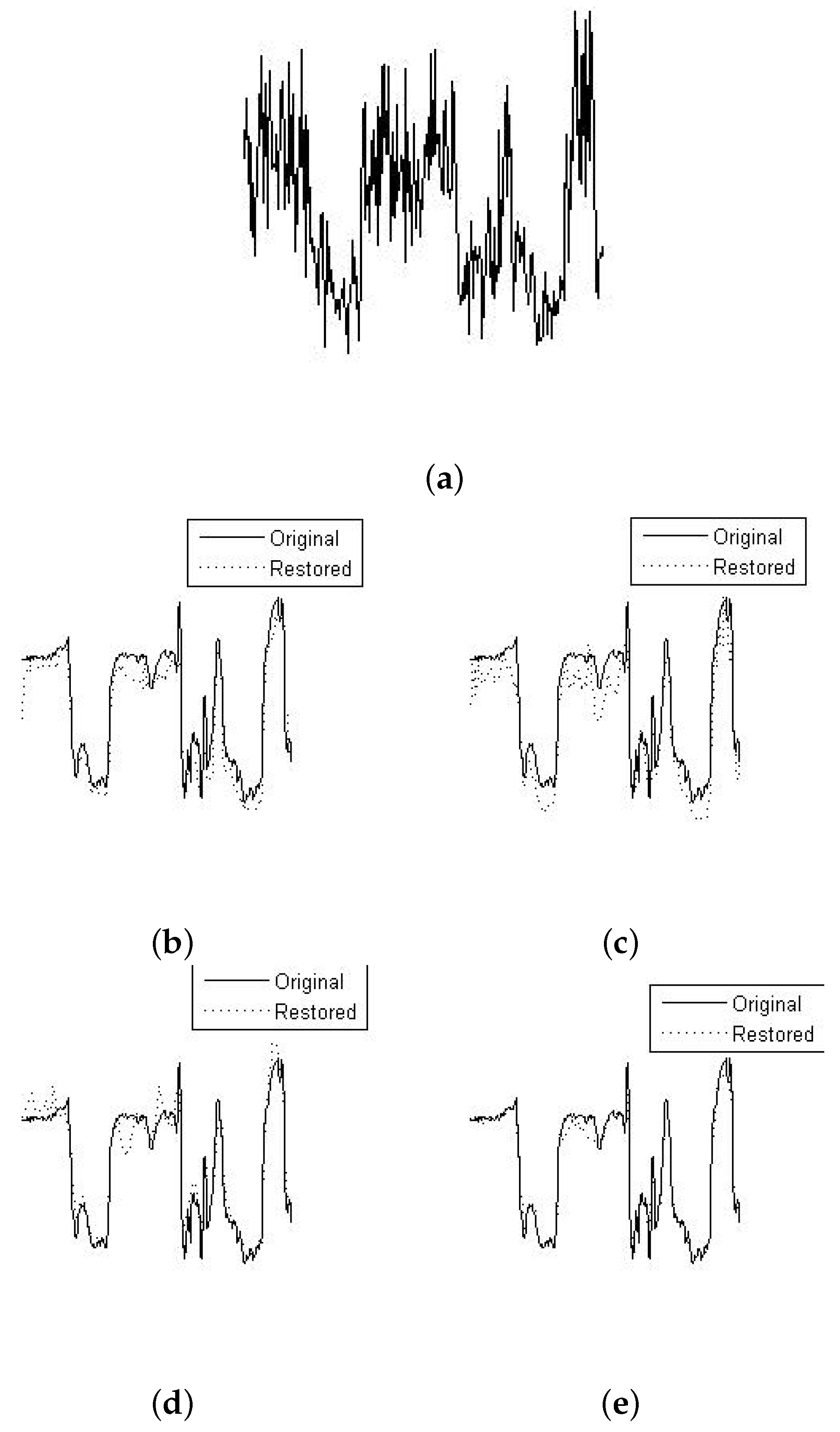
4.2. Experimental Results
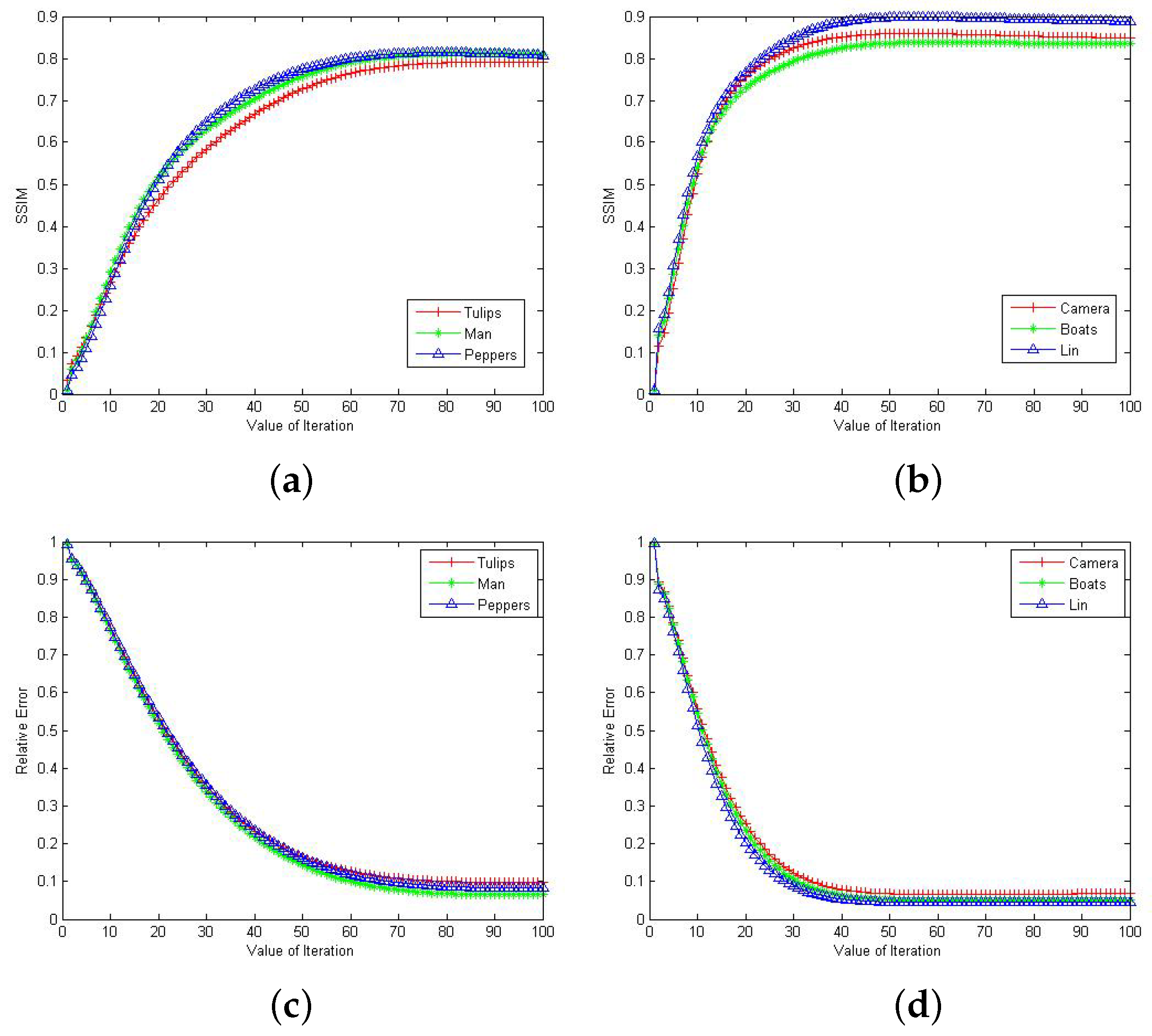
4.3. Convergence Analysis
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Li, F.; Ng, M.K.; Shen, C.M. Multiplicative noise removal with spatially varying regularization parameters. Siam J. Imaging Sci. 2010, 3, 1–20. [Google Scholar] [CrossRef]
- Shi, B.L.; Huang, L.H.; Pang, Z.F. Fast algorithm for multiplicative noise removal. J. Vis. Commun. Image Represent. 2012, 23, 126–133. [Google Scholar] [CrossRef]
- Rudin, L.; Lions, P.L.; Osher, S. Multiplicative denoising and deblurring: Theory and algorithms. In Geometric Level Set Methods in Imaging, Vision, and Graphics; Springer: Berlin/Heidelberg, Germany, 2003; pp. 103–119. [Google Scholar]
- Aubert, G.; Aujol, J.F. A variational approach to removing multiplicative noise. Siam J. Appl. Math. 2008, 68, 925–946. [Google Scholar] [CrossRef]
- Bioucas-Dias, J.M.; Figueiredo, A.T. Multiplicative noise removal using variable splitting and constrained optimization. IEEE Trans. Image Process. 2010, 19, 1720–1730. [Google Scholar] [CrossRef]
- Huang, Y.M.; Ng, M.K.; Wen, Y.W. A new total variation method for multiplicative noise removal. Siam J. Imaging Sci. 2009, 2, 20–40. [Google Scholar] [CrossRef]
- Shi, J.; Osher, S. A nonlinear inverse scale space method for a convex multiplicative noise model. Siam J. Imaging Sci. 2008, 1, 294–321. [Google Scholar] [CrossRef]
- Steidl, G.; Teuber, T. Removing mulitiplicative noise by Douglas-Rachford splitting method. J. Math. Imaging Vis. 2010, 36, 168–184. [Google Scholar] [CrossRef]
- Liu, J.; Huang, T.Z.; Liu, G.; Wang, S.; Lv, X.G. Total variation with overlapping group sparsity for speckle noise reduction. Neurocomputing 2016, 216, 502–513. [Google Scholar] [CrossRef]
- Liu, P. Hybrid higher-order total variation model for multiplicative noise removal. Iet Image Process. 2020, 14, 862–873. [Google Scholar] [CrossRef]
- Shama, M.G.; Huang, T.Z.; Liu, J.; Wang, S. A convex total generalized variation regularized model for multiplicative noise and blur removal. Appl. Math. Comput. 2016, 276, 109–121. [Google Scholar] [CrossRef]
- Lv, Y.H. Total generalized variation denoising of speckled images using a primal-dual algorithm. J. Appl. Math. Comput. 2020, 62, 489–509. [Google Scholar] [CrossRef]
- Chartrand, R. Exact reconstruction of sparse signals via nonconvex minimization. IEEE Signal Process. Lett. 2007, 14, 707–710. [Google Scholar] [CrossRef]
- Han, Y.; Feng, X.C.; Baciu, G.; Wang, W.W. Nonconvex sparse regularizer based speckle noise removal. Pattern Recognit. 2013, 46, 989–1001. [Google Scholar] [CrossRef]
- Chen, X.J.; Zhou, W.J. Smoothing nonlinear conjugate gradient method for image restoration using nonsmooth nonconvex minimization. Siam J. Imaging Sci. 2010, 3, 765–790. [Google Scholar] [CrossRef]
- Nikolova, M. Analysis of the recovery of edges in images and signals by minimizing nonconvex regularized least-squares. Multiscale Model. Simul. 2005, 4, 960–991. [Google Scholar] [CrossRef]
- Nikolova, M.; Ng, M.K.; Zhang, S.; Ching, W.K. Efficient reconstruction of piecewise constant images using nonsmooth nonconvex mininmization. Siam J. Imaging Sci. 2008, 1, 2–25. [Google Scholar] [CrossRef]
- Krishnan, D.; Fergus, R. Fast image deconvolution using hyper-Laplacian priors. In Proceedings of the Advances in Neural Information Processing Systems 22: 23rd Annual Conference on Neural Information Processing Systems 2009, Vancouver, BC, Canada, 7–10 December 2009; pp. 1033–1041. [Google Scholar]
- Levin, A.; Weiss, Y.; Durand, F.; Freeman, W.T. Understanding and evaluating blind deconvolution algorithms. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2009, Miami, FL, USA, 20–25 June 2009; pp. 1964–1971. [Google Scholar]
- Fergus, R.; Singh, B.; Hertzmann, A.; Roweis, S.T.; Freeman, W.T. Removing camera shake from a single photograph. ACM Trans. Graphics 2006, 25, 787–794. [Google Scholar] [CrossRef]
- Chang, Y.; Yan, L.; Zhong, S. Hyper-Laplacian regularized unidirectional lowrank tensor recovery for multispectral image denoising. In Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition 2017, Honolulu, HI, USA, 21–26 July 2017; pp. 5901–5909. [Google Scholar]
- Kong, J.; Lu, K.; Jiang, M. A new blind deblurring method via hyper-Laplacian prior. Procedia Comput. Sci. 2017, 107, 789–795. [Google Scholar] [CrossRef]
- Zuo, W.M.; Meng, D.Y.; Zhang, L.; Feng, X.C.; Zhang, D. A generalized iterated shrinkage algorithm for non-convex sparse coding. In Proceedings of the IEEE International Conference on Computer Vision 2013, Sydney, Australia, 3–6 December 2013; pp. 217–224. [Google Scholar]
- Shi, M.Z.; Han, T.T.; Liu, S.Q. Total variation image restoration using hyper-Laplacian prior with overlapping group sparsity. Signal Process. 2016, 126, 65–76. [Google Scholar] [CrossRef]
- Liu, J.; Huang, T.Z.; Selesnick, I.W.; Lv, X.G.; Chen, P.Y. Image restoration using total variation with overlapping group sparsity. Inf. Sci. 2015, 295, 232–246. [Google Scholar] [CrossRef]
- Jon, K.; Sun, Y.; Li, Q.X.; Liu, J.; Wang, X.F.; Zhu, W.S. Image restoration using overlapping group sparsity on hyper-Laplacian prior of image gradient. Neurocomputing 2021, 420, 57–69. [Google Scholar] [CrossRef]
- Candès, E.J.; Wakin, M.B.; Boyd, S.P. Enhancing sparsity by reweighted ℓ1 minimization. J. Fourier Anal. Appl. 2008, 14, 877–905. [Google Scholar] [CrossRef]
- Zhao, X.L.; Wang, F.; Ng, M.K. A new convex optimization model for multiplicative noise and blur removal. Siam J. Imaging Sci. 2014, 7, 456–475. [Google Scholar] [CrossRef]
- Wang, Z.; Bovik, A.C.; Sheikh, H.R.; Simoncelli, E.P. Image quality assessment: From error visibility to structural similarity. IEEE Trans. Image Process. 2004, 13, 600–612. [Google Scholar] [CrossRef] [PubMed]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Level | Image | CONVEX [28] | OGSTVD [9] | M-TGV [12] | NHOGSHL |
|---|---|---|---|---|---|
| PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | ||
| L = 30 | Tulips | 25.23/0.7615 | 25.39/0.7609 | 27.14/0.8312 | 27.29/0.8344 |
| Man | 26.19/0.7527 | 26.08/0.7288 | 28.39/0.8326 | 29.04/0.8583 | |
| Camera | 25.91/0.7958 | 26.75/0.7930 | 29.06/0.8260 | 29.17/0.8453 | |
| Boats | 26.74/0.7603 | 27.56/0.7869 | 27.87/0.7926 | 29.46/0.8372 | |
| Lin | 30.88/0.8814 | 29.93/0.8468 | 32.47/0.8970 | 32.61/0.9194 | |
| Peppers | 27.01/0.7922 | 27.40/0.7949 | 28.99/0.8186 | 29.56/0.8377 |
| Level | Image | CONVEX [28] | OGSTVD [9] | M-TGV [12] | NHOGSHL |
|---|---|---|---|---|---|
| PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | ||
| L = 20 | Tulips | 24.46/0.7310 | 24.89/0.7447 | 25.96/0.7822 | 26.04/0.7971 |
| Man | 25.63/0.7338 | 25.88/0.7211 | 27.07/0.7826 | 27.90/0.8212 | |
| Camera | 25.58/0.7870 | 26.16/0.7274 | 27.84/0.8113 | 28.13/0.8294 | |
| Boats | 26.06/0.7434 | 26.77/0.7350 | 26.78/0.7623 | 28.35/0.8122 | |
| Lin | 29.03/0.8696 | 29.39/0.8229 | 31.39/0.8983 | 31.82/0.9164 | |
| Peppers | 26.28/0.7773 | 26.69/0.7474 | 27.90/0.8012 | 28.78/0.8220 |
| Level | Image | CONVEX [28] | OGSTVD [9] | M-TGV [12] | NHOGSHL |
|---|---|---|---|---|---|
| PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | PSNR/SSIM | ||
| Tulips | 22.85/0.6842 | 23.52/0.6845 | 24.38/0.7165 | 24.51/0.7466 | |
| Man | 24.34/0.6968 | 24.48/0.6590 | 25.65/0.7280 | 26.46/0.7787 | |
| Camera | 23.78/0.7564 | 23.91/0.7214 | 26.30/0.7697 | 26.80/0.7986 | |
| Boats | 23.91/0.6858 | 25.28/0.6817 | 25.05/0.6966 | 26.57/0.7553 | |
| Lin | 26.67/0.8451 | 27.70/0.7851 | 29.50/0.8555 | 29.93/0.8835 | |
| Peppers | 24.25/0.7401 | 25.22/0.7090 | 26.41/0.7650 | 27.03/0.7804 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhu, J.; Wei, Y.; Wei, J.; Hao, B. A Non-Convex Hybrid Overlapping Group Sparsity Model with Hyper-Laplacian Prior for Multiplicative Noise. Fractal Fract. 2023, 7, 336. https://doi.org/10.3390/fractalfract7040336
Zhu J, Wei Y, Wei J, Hao B. A Non-Convex Hybrid Overlapping Group Sparsity Model with Hyper-Laplacian Prior for Multiplicative Noise. Fractal and Fractional. 2023; 7(4):336. https://doi.org/10.3390/fractalfract7040336
Chicago/Turabian StyleZhu, Jianguang, Ying Wei, Juan Wei, and Binbin Hao. 2023. "A Non-Convex Hybrid Overlapping Group Sparsity Model with Hyper-Laplacian Prior for Multiplicative Noise" Fractal and Fractional 7, no. 4: 336. https://doi.org/10.3390/fractalfract7040336