Comparative Study of Machine Learning Algorithms to Classify Hand Gestures from Deployable and Breathable Kirigami-Based Electrical Impedance Bracelet


Abstract
:
1. Introduction
2. Materials and Methods
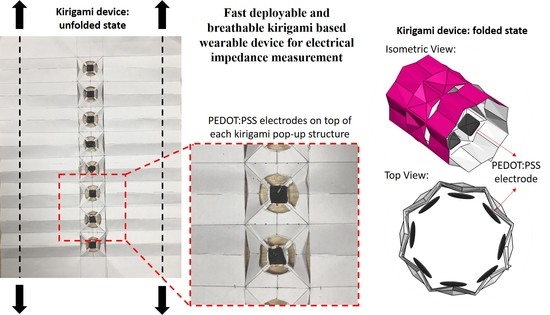
2.1. Kirigami Pattern Design
2.2. Electrode Placement and Data Acquisition
2.3. Machine Learning Algorithms for Gesture Classification
3. Results
3.1. Stress-Strain Results from Kirigami Simulation
3.2. Machine Learning Results
4. Discussion
4.1. Comparison between Different Machine Learning Algorithms
4.2. Comparison of Different Levels of Principle Component Analysis for Feature Selection
5. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- Stapornchaisit, S.S.; Kim, Y.Y.; Takagi, A.A.; Yoshimura, N.N.; Koike, Y. Finger Angle estimation from Array EMG system using linear regression model with Independent Component Analysis. Front. Neurorobot. 2019, 13, 75. [Google Scholar] [CrossRef] [PubMed]
- Yu, M.; Li, G.; Jiang, D.; Jiang, G.; Tao, B.; Chen, D. Hand medical monitoring system based on machine learning and optimal EMG feature set. Pers. Ubiquitous Comput. 2019, 1–17. [Google Scholar] [CrossRef]
- Zhang, Y.; Harrison, C. Tomo: Wearable, low-cost electrical impedance tomography for hand gesture recognition. In Proceedings of the 28th Annual ACM Symposium on User Interface Software Technology, Charlotte, NC, USA, 8–11 November 2015; pp. 167–173. [Google Scholar]
- Zhang, Y.; Xiao, R.; Harrison, C. Advancing hand gesture recognition with high resolution electrical impedance tomography. In Proceedings of the 29th Annual Symposium on User Interface Software and Technology, Tokyo, Japan, 16–19 October 2016; pp. 843–850. [Google Scholar]
- Fan, Y.; Ying, L. Solving electrical impedance tomography with deep learning. J. Comput. Phys. 2020, 404, 109119. [Google Scholar] [CrossRef] [Green Version]
- Alessandrini, G. Examples of instability in inverse boundary-value problems. Inverse Probl. 1997, 13, 887. [Google Scholar] [CrossRef]
- Borcea, L. A nonlinear multigrid for imaging electrical conductivity and permittivity at low frequency. Inverse Probl. 2001, 17, 329. [Google Scholar] [CrossRef]
- Borcea, L. Electrical impedance tomography. Inverse Probl. 2002, 18, R99. [Google Scholar] [CrossRef]
- Rymarczyk, T.; Kłosowski, G.; Kozłowski, E.; Tchórzewski, P. Comparison of Selected Machine Learning Algorithms for Industrial Electrical Tomography. Sensors 2019, 19, 1521. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Zheng, W.; Huang, W.; Gao, F.; Yang, H.; Dai, M.; Liu, G.; Qiu, Y. Kirigami-inspired highly stretchable nanoscale devices using multidimensional deformation of monolayer MoS2. Chem. Mater. 2018, 30, 6063–6070. [Google Scholar] [CrossRef]
- Dias, M.A.; McCarron, M.P.; Rayneau-Kirkhope, D.; Hanakata, P.Z.; Campbell, D.K.; Park, H.S.; Holmes, D.P. Kirigami actuators. Soft Matter 2017, 13, 9087–9092. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Gan, A.W.; Kumar, K.S.; Zhang, L.; Ouyang, J.; Ren, H. Electromechanical characterization of magnetic responsive and conductive soft polymer actuators. In Flexible Robotics in Medicine: A Design Journey of Motion Generation Mechanisms and Biorobotic System Development; Academic Press Inc., Elsevier: London, UK, 2020; chapter 15; p. 349. [Google Scholar] [CrossRef]
- Zhang, L.; Kumar, K.S.; He, H.; Cai, C.J.; He, X.; Gao, H.; Ouyang, J. Fully Organic Skin-compliant Self-adhesive and Stretchable Dry Electrodes for Long-term Motion-robust Epidermal Biopotential Monitoring. Nat. Commun. 2020. accepted. [Google Scholar]
- Kumar, K.S.; Chen, P.Y.; Ren, H. A review of printable flexible and stretchable tactile sensors. Research 2019, 2019, 3018568. [Google Scholar]
- Kumar, K.S.; Xiao, X.; Kalairaj, M.S.; Li, C.; Ponraj, G.; Cai, C.J.; Ren, H. Steerable Surgical Forceps with Soft Stretchable Sensors for Minimally Invasive Interventions. IEEE/ASME Trans. Mechatron. 2020. under revision. [Google Scholar]







{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Stress (N/m2) | Strain (mm) | |
|---|---|---|
| Design 1—Pyramid Tip | 21,370 | 44.84 |
| Design 2—Flat-Top | 1190 | 22.54 |
| Design 3—Flat Platform | 11,290 | 40.26 |
| Model/Class | Down | Fist | Left | Right | Up | Total |
|---|---|---|---|---|---|---|
| Quadratic SVM | 77.00 | 88.50 | 92.00 | 100.00 | 100.00 | 91.49 |
| Medium Gaussian SVM | 78.20 | 87.40 | 88.50 | 98.90 | 100.00 | 90.57 |
| Subspace Discriminant Ensemble | 97.70 | 65.50 | 69.00 | 87.40 | 97.70 | 83.45 |
| Linear Discriminant | 93.10 | 71.30 | 74.70 | 79.30 | 96.60 | 82.99 |
| Cosine kNN | 75.90 | 70.51 | 72.40 | 90.80 | 100.00 | 81.84 |
| Naïve Bayes | 75.90 | 69.00 | 70.10 | 92.00 | 98.90 | 81.15 |
| Medium Tree | 62.10 | 63.20 | 46.00 | 97.70 | 100.00 | 73.79 |
| Average accuracy | 79.99 | 73.63 | 73.24 | 92.30 | 99.03 | 83.64 |
| No. of PCA Components | 64 | 48 | 24 | 12 | 8 | 4 | 2 |
|---|---|---|---|---|---|---|---|
| Quadratic SVM | 92.64 | 91.49 | 90.34 | 84.83 | 75.17 | 69.43 | 58.39 |
| Medium Gaussian SVM | 91.72 | 90.57 | 91.26 | 83.22 | 78.16 | 71.49 | 59.77 |
| Subspace Discriminant Ensemble | 82.53 | 83.45 | 80.69 | 82.99 | 75.4 | 59.77 | 52.41 |
| Linear Discriminant | 80.46 | 82.99 | 83.45 | 81.38 | 75.17 | 68.97 | 58.62 |
| Cosine kNN | 81.15 | 81.84 | 80.92 | 82.99 | 75.63 | 73.33 | 57.47 |
| Naïve Bayes | 73.10 | 81.15 | 81.84 | 78.16 | 71.72 | 69.89 | 59.31 |
| Medium Tree | 73.56 | 73.79 | 70.8 | 70.57 | 67.13 | 65.29 | 62.07 |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Joseph Vedhagiri, G.P.; Wang, X.Z.; Senthil Kumar, K.; Ren, H. Comparative Study of Machine Learning Algorithms to Classify Hand Gestures from Deployable and Breathable Kirigami-Based Electrical Impedance Bracelet. Multimodal Technol. Interact. 2020, 4, 47. https://doi.org/10.3390/mti4030047
Joseph Vedhagiri GP, Wang XZ, Senthil Kumar K, Ren H. Comparative Study of Machine Learning Algorithms to Classify Hand Gestures from Deployable and Breathable Kirigami-Based Electrical Impedance Bracelet. Multimodal Technologies and Interaction. 2020; 4(3):47. https://doi.org/10.3390/mti4030047
Chicago/Turabian StyleJoseph Vedhagiri, Godwin Ponraj, Xin Zhi Wang, Kirthika Senthil Kumar, and Hongliang Ren. 2020. "Comparative Study of Machine Learning Algorithms to Classify Hand Gestures from Deployable and Breathable Kirigami-Based Electrical Impedance Bracelet" Multimodal Technologies and Interaction 4, no. 3: 47. https://doi.org/10.3390/mti4030047