On Singular Perturbation of Neutron Point Kinetics in the Dynamic Model of a PWR Nuclear Power Plant



Abstract
:1. Introduction
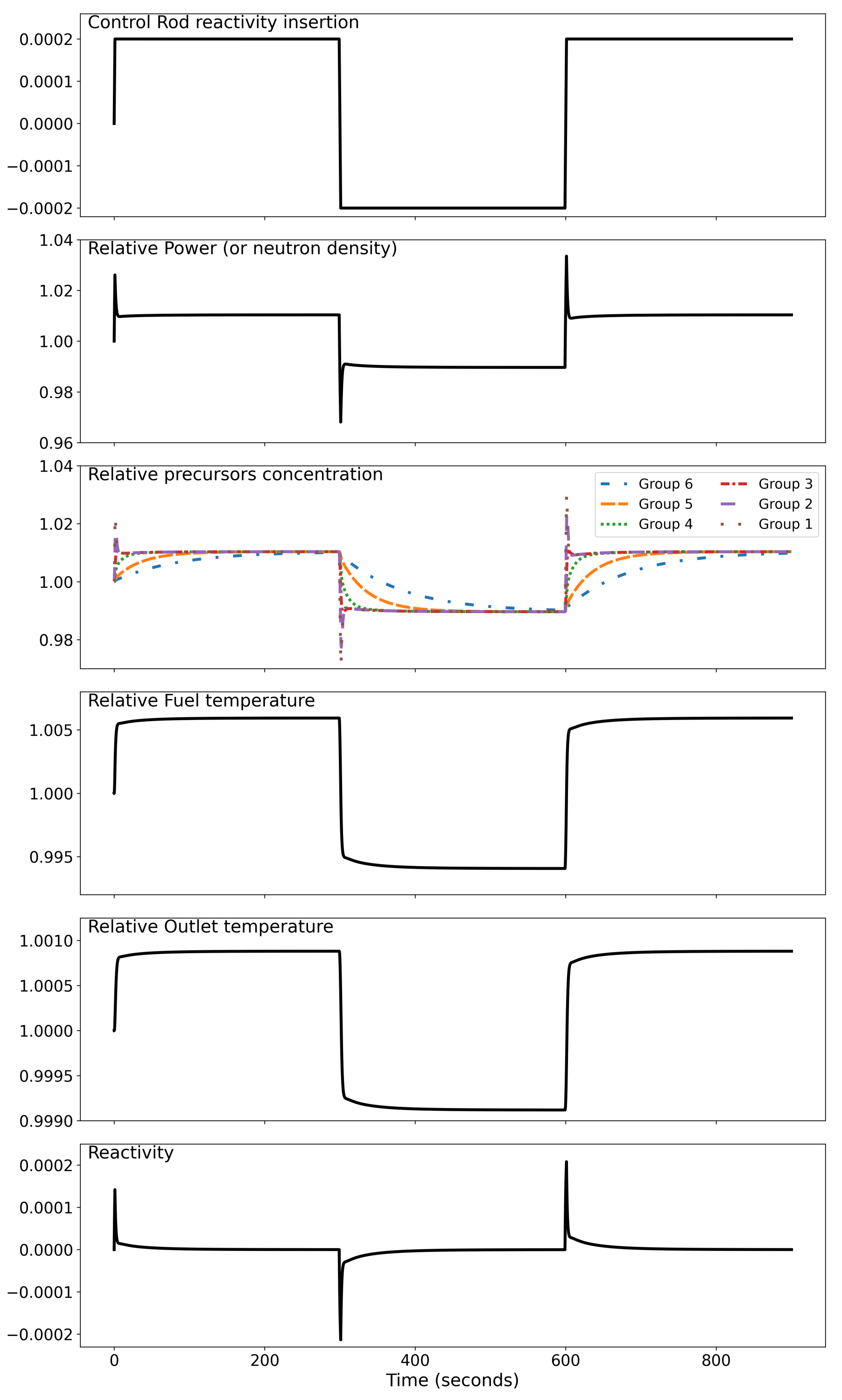
2. Lumped Parameter Model for Simulation
3. Enhacement of Numerical Efficiency by Singularly Perturbed Point Kinetics
3.1. Background of Singular Perturbation
- The functions f and g in Equations (12) and (13), respectively, and their first partial derivatives with respect to and the first partial derivative of g with respect to t are continuous.
- Initial conditions and in Equations (12) and (13), respectively, are smooth functions of .
- The function in Equation (15) and the Jacobian have continuous first partial derivatives with respect to their arguments.
- The reduced-order system in Equation (16) has a unique solution for within a compact subset of the solution space.
- The origin in the state space of Equation (19) is an exponentially stable equilibrium of the boundary-layer system.
3.2. Singularly Perturbed Neutron Point Kinetics
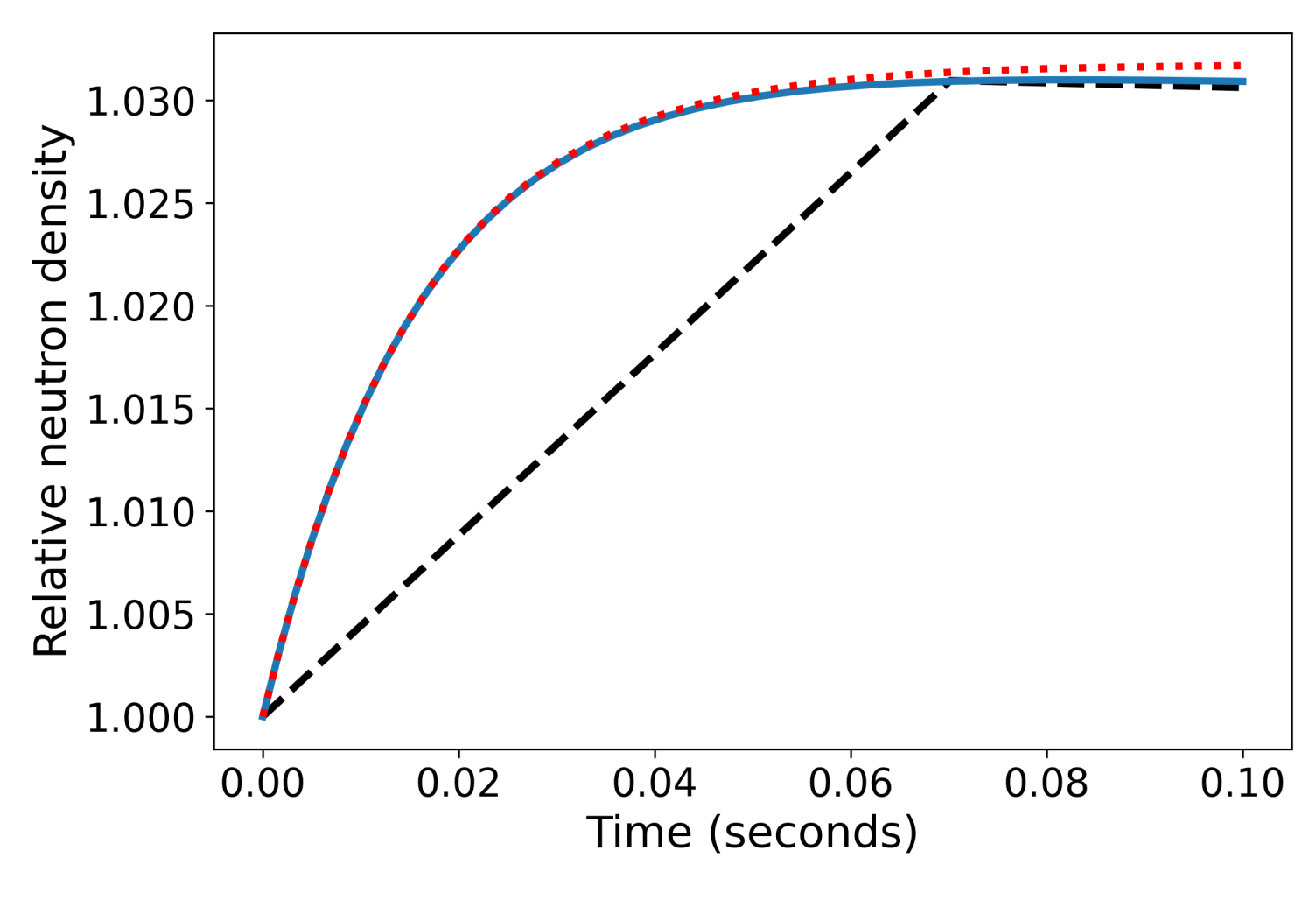
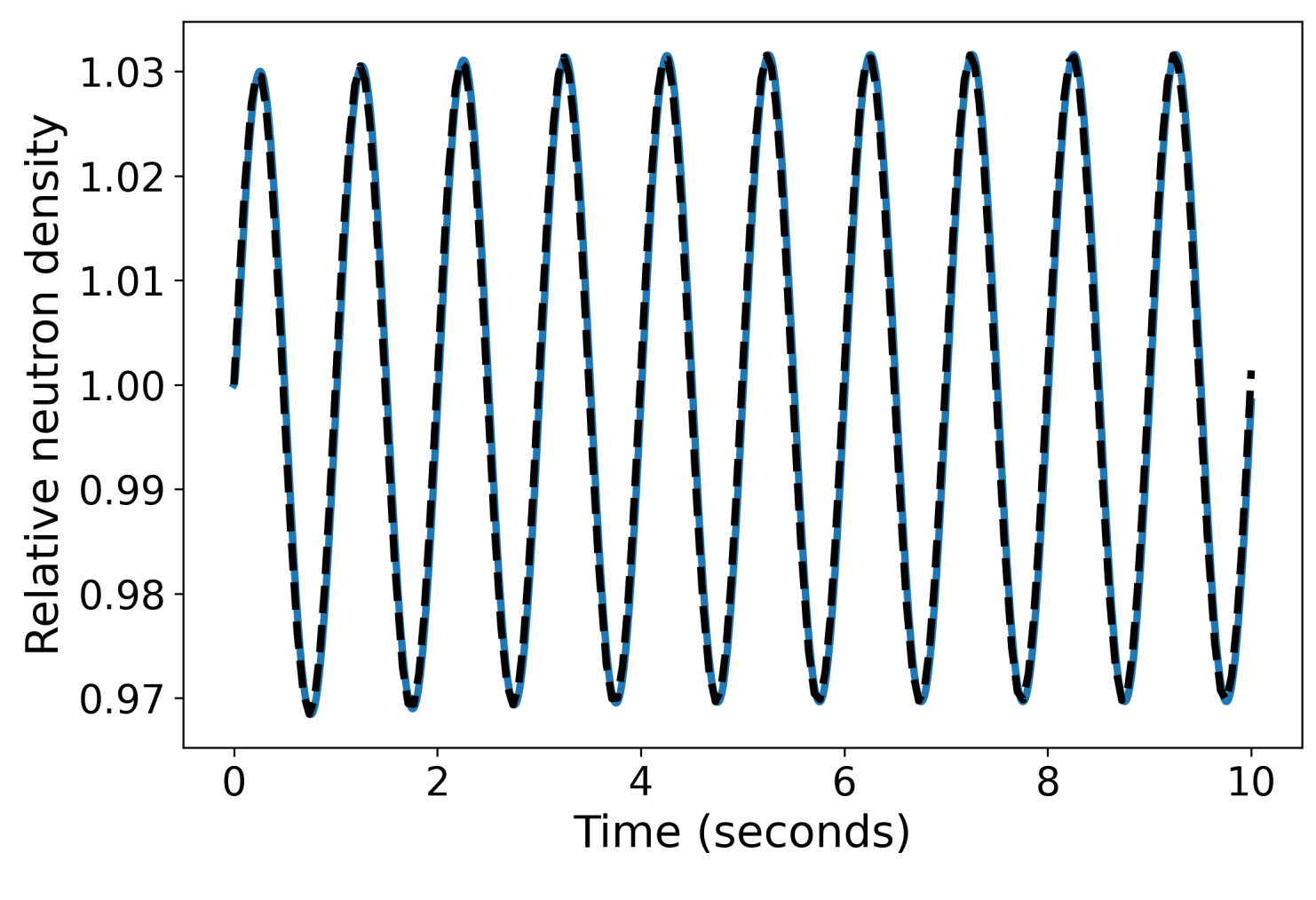
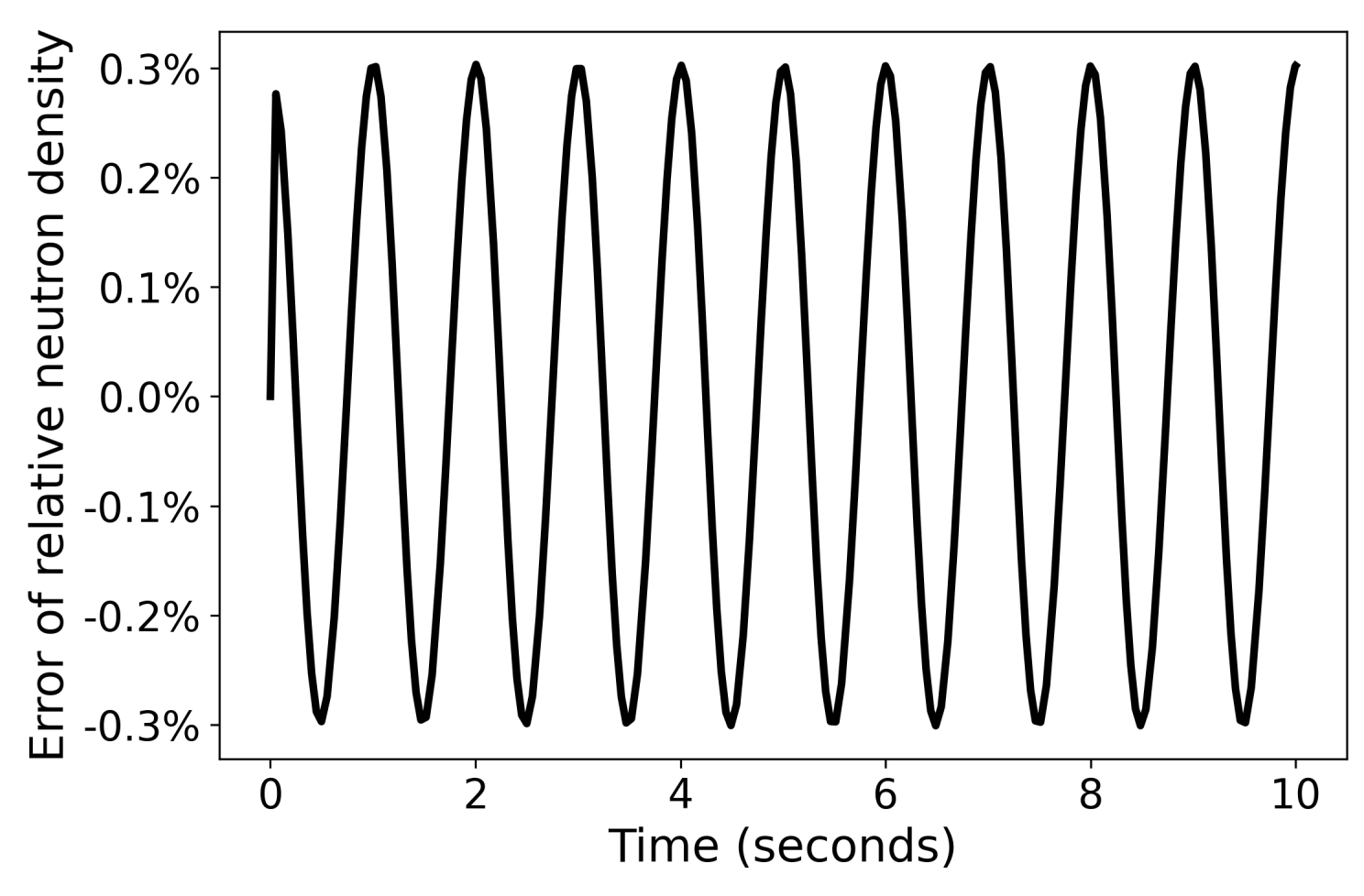
3.3. Example: Sinusoidally Oscillating Reactivity Insertion
4. Discussion and Conclusions
Supplementary Materials
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviations
| n | neutron density |
| i-th delayed neutron precursor concentration | |
| number of delayed concentration groups () | |
| effective precursor decay constant for group i | |
| effective prompt neutron lifetime | |
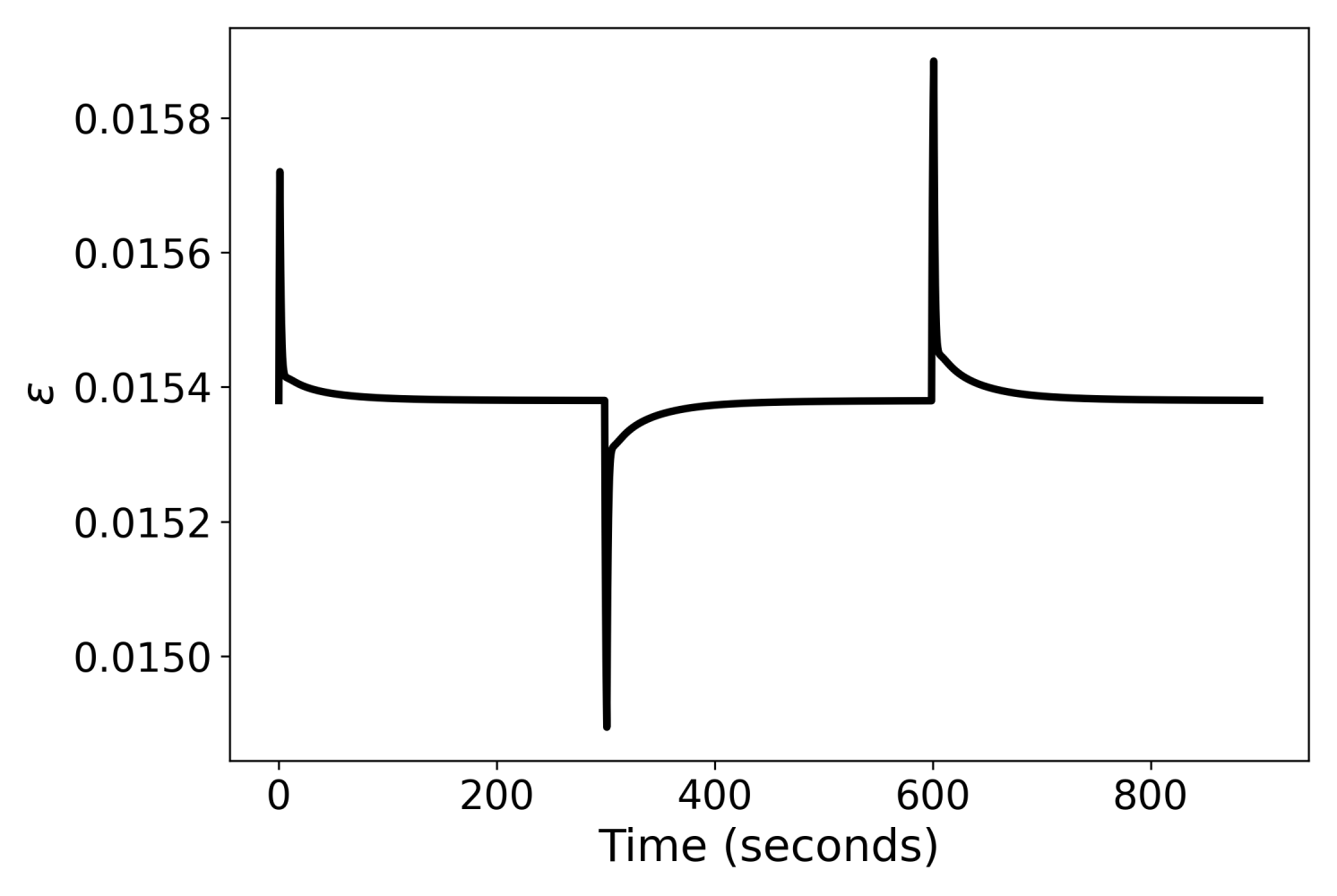
| time-dependent singular perturbation parameter | |
| time-averaged singular perturbation parameter | |
| total delayed neutron fraction | |
| reactivity | |
| control rod reactivity | |
| power transferred from fuel to coolant | |
| power removed from the coolant | |
| reactor power | |
| heat transfer coefficient between fuel and coolant | |
| M | mass flow rate times heat capacity of coolant water |
| average fuel temperature in the reactor | |
| relative average fuel temperature ( | |
| coolant temperature at reactor exit | |
| relative coolant temperature at reactor exit () | |
| coolant temperature at reactor entrance | |
| average coolant temperature in the reactor | |
| fraction of reactor power deposited in the fuel | |
| reference coolant temperature at reactor entrance | |
| reference average coolant temperature | |
| total heat capacity of the fuel and structural material | |
| total heat capacity of the reactor coolant | |
| fraction of neutrons that come from delayed group i | |
| coolant temperature coefficient | |
| fuel temperature coefficient | |
| relative neutron density | |
| i-th delayed neutron precursor’s relative concentration | |
| initial time of transients | |
| end time of transients |
References
- Sharma, G.; Bandyopadhyay, B.; Tiwari, A. Spatial Control of a Large Pressurized Heavy Water Reactor by Fast Output Sampling Technique. IEEE Trans. Nucl. Sci. 2003, 50, 1740–1751. [Google Scholar] [CrossRef]
- Edwards, R.; Lee, K.; Schultz, M. State feedback assisted classical control: An incremental approach to control modernization of existing and future nuclear reactors and power plants. Nucl. Technol. 1990, 92, 167–185. [Google Scholar] [CrossRef]
- Stultz, S.; Kitto, J. Steam: Its Generation and Use, 40th ed.; Prentice Hall: Upper Saddle River, NJ, USA, 1992. [Google Scholar]
- Oka, Y.; Suzuki, K. Nuclear Reactor Kinetics and Plant Control; Springer: Berlin, Germany, 2013; Volume 10. [Google Scholar]
- Asatani, K.; Iwazumi, T.; Hattori, Y. Error estimation of prompt jump approximation by singular perturbation theory. J. Nucl. Sci. Technol. 1971, 8, 653–656. [Google Scholar] [CrossRef]
- Ward, M.E.; Lee, J.C. Singular perturbation analysis of relaxation oscillations in reactor systems. Nucl. Sci. Eng. 1987, 95, 47–59. [Google Scholar]
- Shimjith, S.R.; Tiwari, A.P.; Bandyopadhyay, B. A three-time-scale approach for design of linear state regulator for spatial control of advanced heavy water reactor. IEEE Trans. Nucl. Sci. 2011, 58, 1264–1276. [Google Scholar] [CrossRef]
- Chen, W.; Hao, J.; Chen, L.; Li, H. Solution of point reactor neutron kinetics equations with temperature feedback by singularly perturbed method. Sci. Technol. Nucl. Install. 2013, 2013, 261327. [Google Scholar] [CrossRef] [Green Version]
- Bortot, S.; Suvdantsetseg, E.; Wallenius, J. BELLA: A multi-point dynamics code for safety-informed design of fast reactors. Ann. Nucl. Energy 2015, 85, 228–235. [Google Scholar]
- Rohde, U.; Kliem, S.; Grundmann, U.; Baier, S.; Bilodid, Y.; Duerigen, S.; Fridman, E.; Gommlich, A.; Grahn, A.; Holt, L.; et al. The reactor dynamics code DYN3D–models, validation and applications. Prog. Nucl. Energy 2016, 89, 170–190. [Google Scholar] [CrossRef]
- Bermejo, J.; Montalvo, C.; Ortego, A. On the possible effects contributing to neutron noise variations in KWU-PWR reactor: Modelling with S3K. Prog. Nucl. Energy 2017, 95, 1–7. [Google Scholar]
- Subekti, M.; Bakhri, S.; Sunaryo, G.R. The simulator development for RDE reactor. J. Phys. Conf. Ser. 2018, 962, 012054. [Google Scholar] [CrossRef]
- Zarei, M. An approach to the coupled dynamics of small lead cooled fast reactors. Nucl. Eng. Technol. 2019, 51, 1272–1278. [Google Scholar] [CrossRef]
- Kokotovic, P.; Khalil, H.; O’Reilly, J. Singular Perturbation Methods in Control: Analysis and Design; SIAM: Philadelphia, PA, USA, 1999. [Google Scholar]
- Khalil, H. Nonlinear Systems, 3rd ed.; Prentice Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Richard, L.; Burden, J. Douglas Faires, Numerical Analysis; Brooks/Cole: Belmont, CA, USA, 2011. [Google Scholar]






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Parameters | Values [Units] |
|---|---|
| 6.53 (MW/K) | |
| M | 92.8 (MW/K) |
| 26.3 (MW·s/K) | |
| 70.5 (MW·s/K) | |
| 563.15 (K) | |
| 0.98 | |
| 0.00001 | |
| −0.00005 | |
| 0.0124 (s) | |
| 0.0305 (s) | |
| 0.1110 (s) | |
| 0.3010 (s) | |
| 1.1400 (s) | |
| 3.0100 (s) | |
| 0.0001 (s) | |
| 0.000215 | |
| 0.001424 | |
| 0.001274 | |
| 0.002568 | |
| 0.000748 | |
| 0.000273 | |
| 0.006502 | |
| 6 | |
| 1 | |
| 1 | |
| 590.09 (K) | |
| 951.81 (K) | |
| 2500 (MW) |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, X.; Ray, A. On Singular Perturbation of Neutron Point Kinetics in the Dynamic Model of a PWR Nuclear Power Plant. Sci 2020, 2, 36. https://doi.org/10.3390/sci2020036
Chen X, Ray A. On Singular Perturbation of Neutron Point Kinetics in the Dynamic Model of a PWR Nuclear Power Plant. Sci. 2020; 2(2):36. https://doi.org/10.3390/sci2020036
Chicago/Turabian StyleChen, Xiangyi, and Asok Ray. 2020. "On Singular Perturbation of Neutron Point Kinetics in the Dynamic Model of a PWR Nuclear Power Plant" Sci 2, no. 2: 36. https://doi.org/10.3390/sci2020036