1. Introduction
Thanks to their light weight and structural efficiency, cylindrical shells have been used in several engineering applications, ranging from pressure vessels, piping systems, and heat exchangers to the latest employment in the aerospace industry, such as aircraft fuselage and rocket bodies. Besides developing mathematical models to address the mechanical behaviour of thin-walled cylinders under static loads, characterising their dynamic response to free vibrations has attracted researchers’ interest since the nineteenth century, intending to predict their natural frequencies already during the design stage to prevent time-varying loads from causing severe faults during the manufacturing process or normal use [
1,
2].
The first theories on the elastic behaviour of homogeneous and isotropic cylindrical shells that have laid the basis for the natural vibrations analysis were proposed by Love [
3], Flügge [
4], Timoshenko [
5], Sanders [
6], Reissner [
7], Donnell [
8], and Mushtari [
9]. In a monography of 1973, Leissa [
10] reviewed the state of the research on the vibrations of shells up to that point. Flügge [
4] was the first to find exact solutions for natural frequencies of shells of infinite length with simply supported ends. Flügge’s approach was used by Arnold and Warburton [
11], who instead used Timoshenko’s equations and proposed some of the first experimental results of simply supported thin cylinders. Nonetheless, this was the only possible exact solution that could be solved before the advent of high-speed digital calculators. For instance, Warburton [
12] discussed an exact general theory to determine natural frequencies for cylindrical shells with any end conditions. Still, it is unsuitable for rapid estimates since it is based on an iterative approach requiring the reasonable assumption of an initial natural frequency. Indeed, due to the continuous nature of the problem, finding the exact eigenfunctions by integrating the equations of motion, which constitute a system of partial differential equations, is far from trivial.
Therefore, some early approximated approaches based on energy minimisation were proposed, such as the Rayleigh–Ritz method [
13] that relies on Lagrange’s equations written for displacements in the three fundamental directions, i.e., the axial, circumferential, and radial, after the assumption of a reasonable waveform as eigenfunction. According to Rayleigh’s principle, Arnold and Warburton [
14] proved that performing a variables separation in the eigenfunctions and introducing the beam flexural waveform in the vibrational displacements for clamped-ended and simply supported cylinders results in simplified calculation and yet rather accurate results. Sewall and Naumann [
15] provided experimental and analytical results obtained by a similar approach. Koval and Cranch [
16] and Smith and Haft [
17] focused their works on the clamped/clamped cylinders from an experimental and numerical point of view, respectively. Among the contributions of the second half of the twentieth century, it is worth mentioning the research of Sharma on the free vibration of clamped/free cylinders based on an iterative approach derived from Flügge’s equations [
18] and an approximated closed-form solution derived from Sanders’ equations based on Rayleigh’s approach starting from the vibrational mode of a cantilever beam [
19].
After the first pioneering studies on the natural vibration of thin cylindrical shells, it became clear that a trade-off between accuracy and fast calculation was necessary to integrate the partial differential equations underpinning the problem of free vibrations of cylinders with any boundary condition [
20,
21,
22]. In 1966, Forsberg [
23] compared three methods to predict the natural frequencies of thin cylinders: an exact solution, a finite difference solution, and an energetic approach. The latter was the only one yielding an explicit expression.
The rapid development of high-speed automatic calculators over the last decades has fostered the introduction of new algorithms to solve the free vibrations problem of thin circular cylindrical shells iteratively or numerically [
24]. Chung [
25] obtained the expression of the frequency equation for any boundary condition using Sanders’ shell equations with the axial displacements represented as Fourier series, but an iterative numerical method is required. Bert and Malik [
26] proposed a semi-analytical approach based on the differential quadrature method applied to Flügge’s equations, while Loy et al. [
27] presented an improved version of the same algorithm. Still, in both cases, a convergence analysis is necessary. Zhang et al. [
28] used the local adaptive differential quadrature method, which employs localised interpolating basis functions and exterior grid points for boundary treatments. Pellicano [
29] proposed a method for analysing linear and nonlinear vibrations of circular cylindrical shells with different boundary constraints, using harmonic functions and Chebyshev polynomials for displacements and a numerical technique for the resolution. Xuebin [
30] used variables separation for any boundary conditions and applied the Newton–Raphson iteration method to solve a coupled polynomial eigenvalue problem based on Flügge’s equations. Khalili et al. [
31] formulated a 3D refined higher-order shear deformation theory for the free vibration analysis of simply supported and clamped-ended cylindrical shells; the solution was obtained by the Galerkin numerical method. Xie et al. [
32] used the Haar wavelet discretisation method. Xing et al. [
33] presented an exact solution for different constraints from Donnell–Mushtari’s equations using variables separation and Newton’s iterative method. A similar approach was used by Fakkaew et al. [
34]. Lastly, the latest contributions focus on the finite element method (FEM) using the block Lanczos iteration method [
35], the reverberation-ray matrix approach [
36], Galerkin projections of the partial differential equations governing the shell equations of motion [
37], the symplectic approach [
38,
39], and the isogeometric analysis [
40] to extend the theory of natural vibrations to various thin-walled structures, also in composite materials [
41].
The reduction or even absence of simplifying assumptions in the above numerical methods yields more accurate solutions. Nevertheless, the calculation procedure is often cumbersome: adequate knowledge of the employed numerical method is required to ensure the algorithm convergence, and the computing process may be computationally intense and time-consuming, sometimes requiring a first-attempt solution reasonably close to the unknown exact one. As a result, higher accuracy is achieved at the expense of usability and immediacy. Therefore, simplified approaches leading to more straightforward explicit formulations are still deemed worthy of investigation, not only for the free vibration problem, but also in other analysis of the dynamic stability, e.g., the vibration buckling problem of shells under pulsating external loads [
42,
43,
44]. Moreover, the solution achieved through a simplified rapid procedure can be used as the initial guess value for the numerical methods.
The simplifying assumptions can concern the formulation of the equations of motion for thin cylinders [
8,
9,
45,
46,
47,
48,
49] or the approach for solving the partial differential equations by using energetic methods such as Rayleigh–Ritz’s [
50,
51] or Hamilton’s principle [
46,
48,
52] and introducing the beam flexural vibrations in the displacements eigenfunctions for thin cylinders [
10,
14,
15,
20,
21,
45,
46,
47,
53,
54,
55]. However, despite the simplification, a closed-form solution is not always ensured [
48,
51]. Moreover, a more immediate mathematical treatment is achieved at the expense of accuracy, which should be ensured within practical thresholds [
23]. Nonetheless, these authors believe that a practical and fast explicit formulation is vital to predict the natural frequencies of thin-walled cylinders in various boundary conditions with sufficient accuracy and without requiring deep expertise on the topic, which is clearly rather challenging, so as to be easily integrated into a wider research framework. For instance, the approximated closed-form solution for clamped-ended cylinders addressed in [
46] and based on a series of cascaded equations derived from the application of Hamilton’s principle to Love’s equations have been exploited as a starting point for later more complex studies to analyse a cylindrical shell containing a variably oriented semi-elliptical surface crack [
56] and the transient elastodynamic behaviour of cylindrical tubes under moving pressures [
57].
Hence, this paper proposes a novel, straightforward, closed-form solution for the natural vibrations of thin cylindrical shells with different boundary conditions. The main scope is to provide scholars and engineers with an easy-to-use mathematical tool which, to the authors’ knowledge, is not yet available in the relevant literature. Starting from Love’s theory, the equations of motion are approximated by Donnell–Mushtari’s assumptions and introduced in the principle of virtual work. After normalising the resulting system to the cylinder length, the eigenfunctions of displacements are assumed as separate-variables functions of the corresponding flexural waveform of a beam subject to the same constraints. The final mathematical formulation is reduced to the eigenvalue problem of a 3 × 3 matrix, made up of real elements whose identification is fast and immediate, depending on the type of constraints and on the cylinder geometrical and material properties. The high usability of this tool makes it suitable to be implemented without requiring any specific knowledge of the topic, fostering its adoption over a wide range of engineering fields. Moreover, it could be exploited for any combination of boundary conditions. Still, only simply supported and clamped ends are considered in this work, being the ones with the higher practical interest since the natural frequencies of any cylinder under an arbitrary degree of fixing, such as through flanges or end-plates, lie between the corresponding natural frequencies occurring with simply supported and clamped ends [
14].
Section 2 outlines the equations of motion underpinning the new mathematical treatment to study the free vibrations problem for thin-walled cylinders. The proposed novel formulation to predict the natural frequencies is described in
Section 3.
Section 4 tests the model accuracy and its validity range by several comparisons with results obtained by the finite element method or available in the literature.
Section 5 concludes this paper.
2. Equations of Motion for Thin Circular Cylindrical Shells
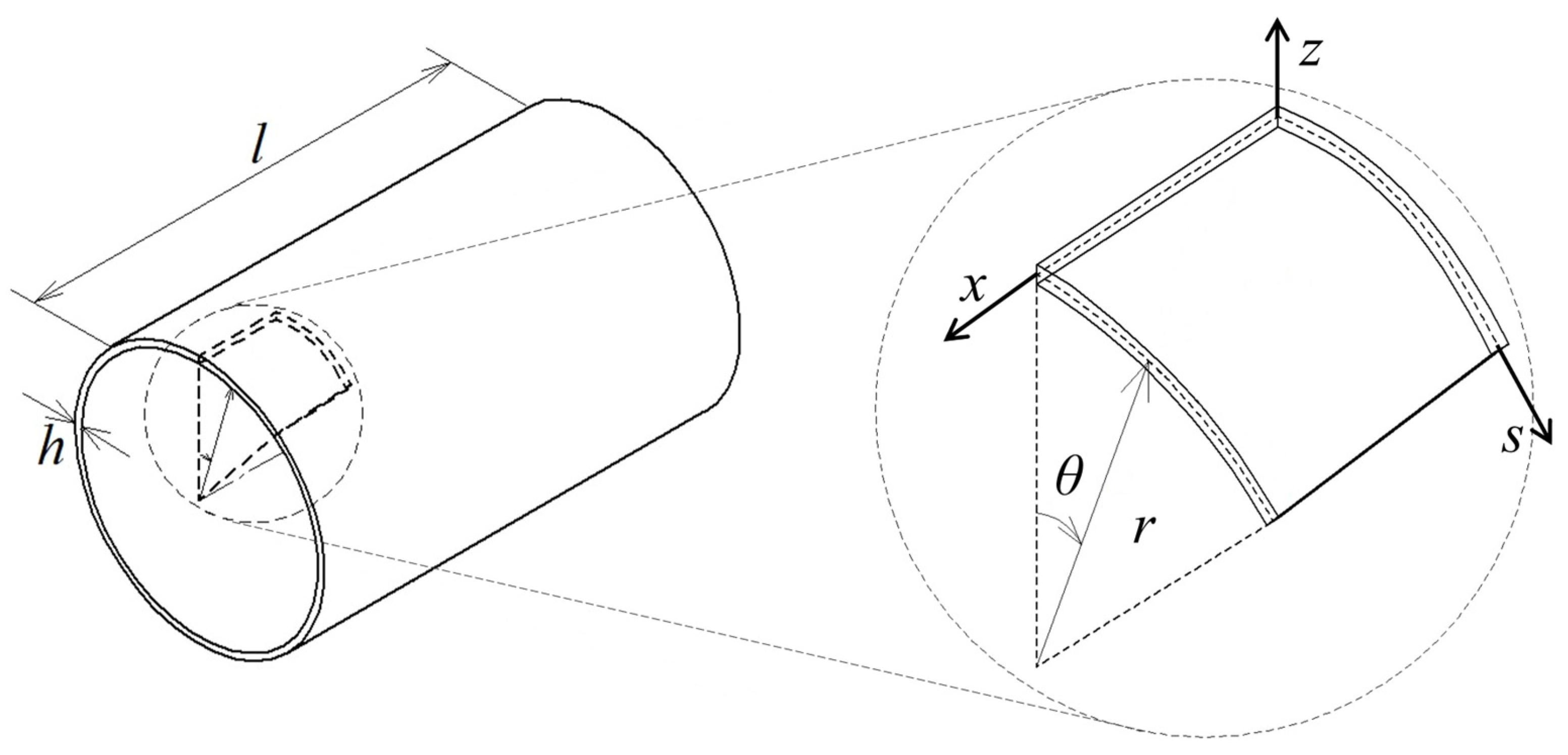
Consider an isotropic and homogeneous thin circular cylindrical shell with length
, uniform thickness
, mean radius
, Young’s modulus
, Poisson’s ratio
, and density
.
Figure 1 shows the coordinate system defined for the middle surface by the axial direction
, the circumferential direction
, and the radial direction
.
is the angular circumferential coordinate.
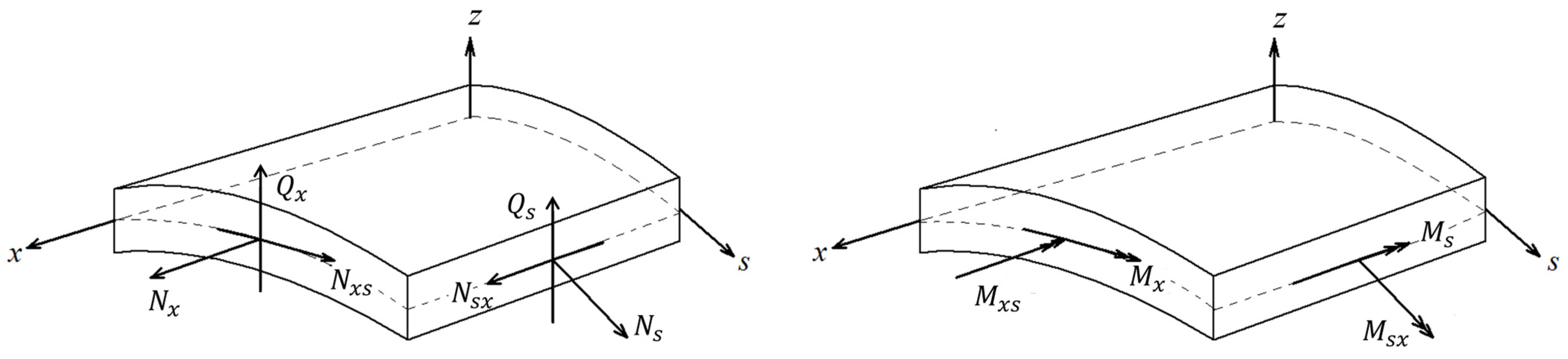
Considering a differential element of the cylindrical shell, the positive forces and moments acting per unit length are shown in
Figure 2. For the face with normal along the
direction,
and
are the in-plane normal and shear forces,
is the out-of-plane shear force,
and
are the bending moment and torsional moment. The same considerations are valid, respectively, for
,
,
,
, and
for the face with normal along the
direction.
The cylindrical shell theory adopted in the present research and outlined in this section is the Donnell–Mushtari version of Love’s theory.
The resulting equations of motion derived from the translational equilibrium along
,
, and
are as follows:
From the rotational equilibrium with respect to
and
, the relations between the transverse shear force resultants and the moment resultants reduce to:
By substituting Equation (2) into the last of Equation (1), the latter reduces to:
The strain–displacement relations are:
where
,
, and
are the displacement components of a point on the middle surface along the axial, circumferential, and radial directions;
and
are the normal strains along
and
directions;
is the in-plane shear strain;
and
are the changes in the curvature of the mid-surface; and
is the mid-surface twist. Note that
for Love’s hypotheses.
Lastly, the resultants of forces and moments are related to the stresses, which in turn are related to the strains by Hooke’s law. Hence, the resulting forces and moments are reduced to the following functions of strains:
where
and
are, respectively, the tensile and bending stiffness of the cylindrical shell.
After substituting the strain–displacement relation of Equation (4) into Equation (5) and then introducing the latter into the first two equations of motion of Equation (1) and in Equation (3), considering that
, the final equations of motion expressed as functions of displacements are:
Equation (6) constitute an eighth-order system of coupled partial differential equations in terms of the three displacement components. Under the hypothesis of a small thickness, the dependence of the three displacement components from the radial coordinate can be neglected; thus, the general expression of the eigenfunctions of the problem is:
where
is the time coordinate. Four boundary conditions for each cylinder end must be introduced to solve the problem. Nevertheless, an exact solution is not available in an explicit form for any combination of boundary constraints. Thus, an approximated resolution based on an energetic method is described in the next section.
3. Generalised Eigenvalue Problem for Natural Frequencies
The most common methods to simplify the free vibrations problem of thin-walled cylinders are based on energetic variational approaches similarly to the Rayleigh–Ritz method. The system of partial differential equations derived from the fundamental theories of thin cylindrical shells (Equation (6)) is reduced to a simpler system of ordinary differential equations by assuming reasonable eigenfunctions for the three displacement components so as not to violate the end conditions, and introducing the equations of motion and the assumed eigenfunctions in an energetic principle. Hence, the resulting solution is not exact but approximately correct on the whole domain.
From the experimental evidence, each vibrational mode of a cylindrical shell is characterised by the number of transverse half-waves, denoted by the positive integer
, and the number of circumferential waves, indicated by the positive integer
. The relevant literature reports several applications proving that fairly accurate results are achieved if a particular solution for a given mode, identified by specific
and
values, is derived by performing a variables separation in the displacements eigenfunctions while ensuring the compliance with the end conditions and the periodicity of the circumferential waveform. Thus, the three coordinates
,
, and
can be decoupled as follows:
where
is the axial coordinate normalised to the cylinder length;
,
, and
are constant displacement amplitudes; and
is the
th transverse waveform of a beam constrained as the cylinder under analysis, which can be generalised as:
where
,
,
, and
are constant values depending on
and the boundary constraints. For a simply supported end, the latter result in the following conditions is:
For a clamped end, it is:
Table 1 lists the flexural waveforms and the frequency equations for a beam subject to the boundary conditions of interest, which are well-established in the relevant literature [
20]. For given constraints, each
th waveform of the beam depends on the
th root of the transcendental frequency equation, denoted by
. Note that the transverse waveform is the same for both ends clamped or one clamped and one simply supported, but the frequency equation and the related solutions differ.
At this point, the equations of motion of Equation (6) are introduced in the principle of virtual work, according to which the virtual work
of all the forces acting on the system, including the inertial actions, is null for any virtual displacements
,
, and
that do not violate the boundary conditions:
Given the arbitrariness of the virtual displacements
,
, and
, Equation (12) can be satisfied if each of the three addends is null. Thus, the problem is reduced to the following three-equation system, obtained by normalising to the cylinder length
:
where
is the cylinder mean radius normalised to the length and
is the normalised thickness.
The system of Equation (13) can be reduced by introducing the assumed eigenfunctions of Equation (8) for the displacement components and their partial derivatives. In particular, consider that for each displacement component
and
where
is arbitrary, the reduced system does not depend on the time coordinate
; indeed, each term of the equations would be multiplied by
, which is constant within the integration domain and thus can be simplified. Moreover, the dependence on the circumferential coordinate
can also be eliminated, because it reduces to
for the first and the third equation and to
for the second one. Hence, after some mathematical manipulation, Equation (13) is reduced to the following homogeneous linear system:
where
. The notation
is the definite integral from 0 to 1 of the product between the
th- and
th-order derivatives of the function
for a given number
of flexural half-waves:
The zero-order derivative is the function
itself.
After simple mathematical manipulation, Equation (14) reduces to the following matrix formulation:
where
;
;
is the unknown vector containing the displacements amplitudes in the three directions,
is the identity matrix, and
is the following matrix:
As it is apparent from Equation (16), the natural frequency of any thin-walled cylinder can be easily calculated by solving the eigenvalue problem of the matrix
, which, thus, is equivalent to a typical dynamic matrix in the modal analysis of discreet systems. From the three eigenvalues
,
, and
, the natural frequency is obtained as follows:
The eigenvectors corresponding to each eigenvalue determine the ratios between the amplitude of the axial, circumferential, and radial displacements for any mode shape.
It is crucial to notice that the integrals of Equation (15) are univocally defined only by the specific
and the cylinder boundary conditions because of the normalisation to the cylinder length. Moreover, from Equations (9) and (15), it can be easily derived that:
where
can be derived from
Table 1. Hence, only the following ratios must be calculated:
Table 2,
Table 3 and
Table 4 list the values of interest of Equation (20), which are derived from the beam flexural waveforms of
Table 1 for the corresponding end condition and can be used in Equation (17) for any thin cylindrical shell.
As a result, populating the dynamic matrix
and solving its eigenvalue problem is immediate and straightforward once the cylinder geometry (
,
,
), the material properties (
,
,
), the vibrational mode (
,
), and the end constraints (
Table 2,
Table 3 and
Table 4) are known.
4. Results and Discussion
The procedure described in
Section 3 was carried out for cylinders with different geometry and material under the three end conditions of interest, i.e., two simply supported ends, two clamped ends, and one clamped and one simply supported end. The eigenvalue problem for the dynamic matrix
was performed in MATLAB R2022a numerical software.
Firstly, the natural frequencies and the displacement amplitudes’ ratios of a steel cylinder (
7833 kg/m
3,
207 kN/mm
2,
0.3) with mean radius
76 mm, length
305 mm, and thickness
0.254 mm were assessed in the three scenarios. The trend of the resulting natural frequencies agrees with the vibrational behaviour of thin-walled cylinders predicted by the relevant literature [
11,
15,
16,
17,
29,
33,
35,
46,
50,
52,
54,
56]; therefore, the results of this first analysis, discussed in
Section 4.1, are listed in the
Appendix A. On the contrary, the numerical and graphical results presented in the current section focus on the model validation.
The same steel cylinder defined above was considered to test the model accuracy by assuming the results of an FEM analysis as a benchmark, as addressed in
Section 4.2.
Section 4.3 proposes a sensitivity analysis of the present model with respect to cylinder geometry and material, presenting a validity range whereby the maximum error against FEM is approximately 10%. Lastly,
Section 4.4 compares the present model with the results obtained by some experimental, numerical, and analytical methods available in the literature.
For
Section 4.1,
Section 4.2 and
Section 4.3, all the mode shapes with
and
were examined. Nonetheless, the natural frequencies for
are not listed in the
Appendix A and in
Section 4.2 for brevity, but the general considerations made in
Section 4.1 and
Section 4.2 remain valid also for
. Moreover, as it is common in the literature on the topic, only the first natural frequency is considered for the model validation carried out in
Section 4.2,
Section 4.3 and
Section 4.4, being the lowest natural frequency as it is addressed in
Section 4.1, and thus the one to be monitored to prevent the undesired risk of resonance phenomena.
4.1. Natural Frequencies and Amplitude Ratios
Table A1,
Table A2 and
Table A3 list the results for the natural frequencies associated with each mode shape (
,
) for every boundary condition derived from the eigenvalues of the dynamic matrix. It is apparent that the first frequency
is lower than
and
by up to two orders of magnitude. Moreover, it is worth noting that
and
are monotonically increasing for increasing
and
, while
shows a minimum for a number
of circumferential waves that increases with the considered number
of transverse half-waves. In
Table A1,
Table A2 and
Table A3, the minimum value of
for a given number
of transverse half-waves is underlined. This general trend for the frequency
was explained by Arnold and Warburton in [
11] by the opposite variation of the stretching energy, which decreases with the number of circumferential waves, and the bending energy, which, on the contrary, increases; as a result, the minimum of the lowest natural frequency
for a given number
of transverse half-waves is due to a minimum in the total strain energy. Nonetheless, depending on the cylinder geometry,
can show a monotonic trend for a low number of transverse half-waves. The global minimum of
, highlighted in bold in
Table A1,
Table A2 and
Table A3, occurs for
1 and
5 if the cylinder has one or two simply supported ends; instead, it occurs for
1 and
6 for the clamped/clamped cylinder. Furthermore, for each mode shape (
,
), the natural frequencies of the clamped/simply supported cylinder (
Table A3) are intermediate between those of the simply supported/simply supported cylinder (
Table A1), which are the lowest, and clamped/clamped cylinder (
Table A2), which are the highest. This evidence validates the hypothesis that the natural frequencies of any cylinder under an arbitrary degree of fixing lie between the natural frequencies achieved for simply supported and clamped ends [
14], corroborating the generality of this work.
Table A4,
Table A5 and
Table A6 show the amplitude ratios derived from the eigenvectors of each mode shape only for
, for brevity. The amplitude of the radial displacement
is chosen as the normalising term. The predominant motion associated with the frequency
is the radial one, while the circumferential displacement and, above all, the axial displacement are small. Thus, the first frequency implies a transverse vibrational mode, whose displacement amplitude increases for increasing
and
. On the contrary, for
and
, the amplitude of the radial displacement decreases for increasing
and
. Nonetheless, for the second frequency
,
grows faster than
for
1; thus, an axial motion is predominant for any
for a simply supported/simply supported cylinder,
4 for a clamped/clamped cylinder, and
3 for a clamped/simply supported cylinder. For
2,
mainly involves a predominant circumferential motion. The third frequency
is always associated with a predominant circumferential motion. Similar trends were obtained in [
46] for the amplitude ratios of a clamped/clamped cylinder.
4.2. Comparison with FEM Results
To test the accuracy of the novel approximated method, the results of a simulations campaign carried out in the commercial software Ansys 22.1, based on the finite element method, were considered as a benchmark. For this purpose, SHELL181 linear elements were used for the modal analysis.
Table 5,
Table 6 and
Table 7 compare the first frequency
obtained by the approximated method and the FEM analysis, reporting the percentage error between the two approaches. Overall, for the cylinder with two simply supported ends, the error is far lower than
1% and mainly negative, which means that the first natural frequency is slightly underestimated on average. On the contrary, the error is higher and mainly positive for the other two end conditions. In
Table 5,
Table 6 and
Table 7, the error related to the global minimum of
is underlined in bold, while an asterisk indicates the maximum error. In this regard, the maximum error between the fast approximated method and the FEM for the simply supported/simply supported cylinder is 2.07% and occurs for
and
; instead, the maximum error is 9.82% and 11.9% for the clamped/clamped or clamped/simply supported cylinder, respectively; in both cases, it occurs for
. Nonetheless, the error occurring for the global minimum frequency, the most potentially dangerous, is just 2.01%, 3.05%, and 3.66%, respectively. Therefore, the level of accuracy is satisfactory.
Figure 3 graphically summarises the results of the comparison with the FEM analysis, showing the trend of
for
8 and
14. The minimum value of
for each
is indicated by a black dot.
4.3. Influence of Cylinder Geometry and Material on Model Accuracy
To further explore the potentiality of the model, its accuracy was tested for different cylinder geometry and material within 8 and 14. Starting from the reference steel cylinder with 4 and 1/300, cylinder length and thickness were changed in turn to assess how they affect model performance for any boundary condition. The observed ranges of variation are 2 10 and 1/400 1/20. For this purpose, it was sufficient to accordingly change or in the dynamic matrix and repeat the resolution of the eigenvalue problem. FEM simulations were conducted to obtain the benchmark values for the first frequency .
Table 8 lists the acceptable range of variation of
and
to comply with a maximum error of the model against the FEM results of approximately 10%. It also reports the maximum error for the global minimum frequency observed within the acceptable range. For any boundary conditions, the model accuracy increases for thinner cylinders. All other conditions being equal, the maximum acceptable value of the thickness/radius ratios is higher for the simply supported/simply supported cylinder, accordingly to the higher model accuracy observed for this boundary condition. On the contrary, the model accuracy improves for long cylinders with two clamped ends and for short cylinders with two simply supported ends. This trend affects the accuracy for a clamped/simply supported cylinder, which shows an intermediate behaviour. Even though the acceptable ranges listed in
Table 8 involve a maximum error of approximately 10%, the error related to the global minimum frequency is approximately 5% only.
Table 9 compares the maximum error and the error for the lowest
for a steel and an aluminium cylinder (
2700 kg/m
3,
68.2 kN/mm
2,
0.33) with
76 mm,
305 mm,
0.254 mm. There are no significant differences, suggesting that the model performance is not affected by the cylinder material.
4.4. Comparison with the Literature
A further test on the validity of the proposed model is performed by considering data available in the literature. This section compares several experimental, numerical, and analytical methods of simply supported/simply supported and clamped/clamped thin-walled cylinders. Different cylinder geometry and material are considered. Experimental or FEM results are always assumed as the benchmark to assess the percentage difference. For brevity, when results for different numbers of transverse half-waves were available, the numerical values listed in the tables reported in the remainder of the section are generally those for
1, whereby the lowest frequencies are observed. The clamped/simply supported condition is not considered here due to the lack of FEM and experimental data in the literature.
Table 10 summarises the literature comparison.
The natural frequencies of an aluminium simply supported/simply supported cylinder were experimentally assessed by Sewall and Naumann [
15] in 1968. After that, the same cylinder was considered by Naeem and Sharma [
50] to present a procedure based on the Rayleigh–Ritz variational approach. The transverse waveforms are modelled by Ritz polynomial functions, resulting in the formulation of an eigenvalue problem which is rather cumbersome, requiring analytical integrations and differentiations. The experimental results were available for
1 and 4
13.
Figure 4 shows the results of the comparison. From the numerical comparison reported in
Table 11, the maximum percentage difference of the present model against the experimental data is 4.30% for
13, while Naeem and Sharma’s model shows a maximum difference of −4.81% for
6. The error in the global minimum frequency for
7 is −0.36% for the present model and 1.64% for Naeem and Sharma. Other experimental results were formerly obtained by Arnold and Warburton [
11] in 1949 for a steel simply supported/simply supported cylinder. Results were available for
10 and 2
6. From
Table 12, which reports the results of the comparison for
4 for brevity, the maximum percentage difference, observed for the global minimum frequency, is 16.22% for
1 and
2. Complete results are shown in
Figure 5.
A comparison with the results reported by Pellicano [
29] is presented in
Table 13 and
Table 14, and
Figure 6 for an aluminium cylinder with two simply supported ends and two clamped ends, respectively. Pellicano’s model assumes Chebyshev polynomials for eigenfunctions and requires a numerical technique for the resolution. Data were available for
1 and 5
12 for the simply supported/simply supported cylinder and for
1 and 6
13 for the clamped/clamped cylinder. The percentage error is assessed against the results of an FEM analysis performed by Pellicano. For the cylinder with two simply supported ends, the exact solution is also provided. In this case, the results of Pellicano’s numerical method equal the exact solution; nonetheless, the present model shows a maximum error of only 0.92% for
8 against FEM and 1.76% for
9 against the exact solution. The error in the global minimum frequency for
7 is 0.73% against FEM and −0.06% against the exact solution. Concerning the clamped/clamped cylinder,
Table 14 shows that the present model has a maximum error of 6.04% for
6, where Pellicano’s method has a maximum error of 1.02%; however, the error of the present model in the global minimum frequency for
9 equals 2.88%, while Pellicano has an error of 0.34%. The error is still good, given the greater simplicity of the proposed novel formulation.
Xuebin [
54] used the wave propagation method and introduced the flexural vibrational mode of a beam to obtain a noniterative mathematical resolution based on a third-order equation. The natural frequencies for an aluminium clamped/clamped cylinder for
1, 3, 5, and
10 were assessed.
Table 15 shows the comparison with the present model only for
1 for brevity, but complete results are shown in
Figure 7. The error is assessed with respect to the results of an FEM analysis reported by Xuebin. The error in the global minimum frequency for
4 is 8.22% for the present model against 1.16% for Xuebin. However, Xuebin’s method shows a significant error for a low number of circumferential waves, achieving a maximum error of 36.19% for
1, more than three times higher than the maximum error of the present model equal to 10.04%. Moreover, the calculation of the coefficients of the third-order equation underpinning Xuebin’s approach is rather convoluted in comparison to the present approximated model.
The last comparison is with the experimental data of Koval and Cranch [
16], the analytical closed-form approaches of Wang and Lai [
53] and Moazzez et al. [
56], the exact solution of Xing et al. [
33] numerically evaluated, and the FEM results discussed in
Section 4.2. Wang and Lai used a direct formula derived from the free vibrations of an infinite-length cylinder. Moazzez et al. used a cascaded algebraic resolution of a third-order equation, presented by Cammalleri and Costanza in [
46], that distinguishes different coefficients for even and odd numbers of transverse half-waves. Xing et al. used the Donnell–Mushtari equations without any other simplifying assumption; thus, the solution is “exact” but assessed by Newton’s iterative method.
Table 16 lists the first natural frequency assessed for
1 and
8. The present method and the one used by Moazzez et al. are in very good agreement, showing a maximum error lower than 10% for
1 and an error of approximately 3% in the global minimum frequency for
6. The “exact” solution of Xing et al. shows the least error with respect to the FEM and experimental data. Against FEM, the maximum error against FEM of Xing et al. is −3.97% for
2, while the error in the global minimum frequency is −0.02%. Nonetheless, the higher error of the present model in comparison with Xing et al. is still acceptable, given the straightforward practice use of the present method that requires neither any initial guess frequencies nor a convergence analysis of the solving algorithm, unlike Xing et al. The approximated formula proposed by Wang and Lai is the less accurate, especially for lower
. It has a maximum error against FEM of 39.47% for
1 and an error in the global minimum frequency of 2.59%.
Figure 8 shows the available first natural frequencies of the models under considerations for
4. Moazzez’s results were excluded from the graphical comparison because they are almost the same as those obtained by the present model.
Overall, the comparison presented in this section suggests that the numerical methods achieve more accurate results, especially with two clamped edges, but at the expense of fast usability. On the contrary, the present approximated model offers a swift, straightforward mathematical treatment which leads to satisfactory accuracy, especially if compared to other analytical methods that sometimes fail for a low number of circumferential waves. The error for the global minimum frequency is generally much lower than 10%. Hence, the practical interest of the proposed approach is significant, given that its ease of use is hard to find in the relevant literature, especially for cylinders with one or two clamped ends. Moreover, it should be noted that, for a given absolute difference, the percentage error is higher for lower frequencies because of its own definition. Indeed, the graphical comparisons of
Figure 4,
Figure 5,
Figure 6,
Figure 7 and
Figure 8 show that the trend of the results obtained by the novel approximated model is in good agreement with FEM and experimental data, even when the percentage error in the global minimum is numerically higher.
When assessing the outcomes of the above comparisons, it should be considered that they may have been affected by potential errors in the results chosen as the benchmark. For instance, the fact that the frequencies resulting from experimental data are often lower than those numerically or analytically assessed suggests that the stiffness of the experimental set-up is lower than those theoretically predicted. Also, potential measurement errors may have occurred. Similarly, the goodness of the results of FEM analysis is strictly dependent on the mesh quality and elements number and type. Therefore, the errors of the present model are widely acceptable within the unavoidable uncertainty range of any engineering problem.
5. Conclusions
This paper proposed a novel procedure to study the free vibrations of an isotropic circular cylindrical shell under different boundary conditions.
The cylinder equations of motion of Donnell–Mushtari’s shell theory were introduced in the principle of virtual work. The normalisation of the resulting system to the cylinder length and the introduction of the eigenfunction of a beam as constrained as the cylinder led to a significant simplification of the mathematical treatment, which was reduced to the eigenvalue problem of a 3 × 3 matrix. In other words, the problem of the free vibrations of a continuous system was reduced to the straightforward definition of a dynamic matrix depending on the cylinder geometry, material, and end constraints, similarly to the modal analysis of discreet systems.
The natural frequencies for several simply supported/simply supported, clamped/clamped, and clamped/simply supported cylinders were assessed and compared to FEM results, experimental data available in the literature, and other numerical and analytical methods. The vibrational behaviour of the clamped/simply supported cylinder lies between the double-simply supported condition, which implies the lowest frequencies, and the double-clamped condition, which results in the highest frequencies. For the cylinder proposed as a case study, the comparison with the present model and FEM analysis showed very good accuracy for a cylinder with two simply supported ends, involving a maximum error of 2.07%. This error increases with one or two clamped ends up to 11.9% and 9.82%, respectively. Nonetheless, the error occurring for the global minimum frequency, the most potentially dangerous, is just 2.01%, 3.66%, and 3.05%, respectively.
To provide a broader insight into the model validity, an FEM simulation campaign proved that the maximum error of approximately 10% for any combination of and is achievable for a wide range of cylinder geometry for any considered end condition. Within the assessed validity range, the error for the global minimum frequency is approximately 5% only. Moreover, a literature comparison showed that the present model resulted in comparable or even higher accuracy than other approximated closed-form approaches available in the literature, while the “exact” methods relying on more cumbersome and time-consuming iterative and numerical techniques perform better, at the expense of usability and immediacy of the computing procedure. Therefore, in general, the level of accuracy is excellent, given that the exact solution of the free vibrations problem for the clamped-end constraints does not exist in a closed form. Thus, the practical interest of the present model is significant.
To conclude, the proposed novel model proved to be a reliable, easy-to-use tool suitable for the rapid esteem of natural frequencies of thin-walled cylinders subject to simply supported or clamped-end conditions. The main strength is the excellent trade-off between usability and accuracy, making it easily implementable also in the design stage without requiring a deep knowledge of the topic.



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}







