
Cyclic Detectors in the Fraction-of-Time Probability Framework


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Signal Decomposition
2.2. Fraction-of-Time Probability
2.3. Cyclic Statistical Functions Estimators
2.3.1. Cyclic CDF
2.3.2. Cyclic CDF and pdf (Kernel-Based Estimators)
2.3.3. Cyclic Autocorrelation
2.3.4. Cyclic Spectrum
2.3.5. 4th-Order Cyclic Moment
2.4. Detection
2.5. Single Cycle (SC) Detectors
2.6. Quadratic Forms (QF) Detectors
2.6.1. QF Detectors Based on Measurements of the Cyclic Autocorrelation, Spectrum, and Moment
- 1.
- exhibits cyclostationarity at : ;
- 2.
- does not exhibit cyclostationarity at : ;
- 3.
- and do not exhibit joint cyclostationarity at : .
- 1.
- exhibits cyclostationarity at : ;
- 2.
- does not exhibit cyclostationarity at : ;
- 3.
- and do not exhibit joint cyclostationarity at : .
2.6.2. QF Detectors Based on Measurements of the Cyclic CDF and pdf
- 1.
- exhibits 1st-order cyclostationarity at : and ;
- 2.
- .
2.6.3. QF Detector Structure
2.6.4. Statistical Test for Presence of Cyclostationarity
3. Results
3.1. Simulation Setup
3.2. Threshold Determined by Monte Carlo Simulations
3.3. Threshold Derived Analytically
3.4. Monte Carlo versus T
3.5. Receiver Operating Characteristic (ROC): Monte Carlo versus Nominal
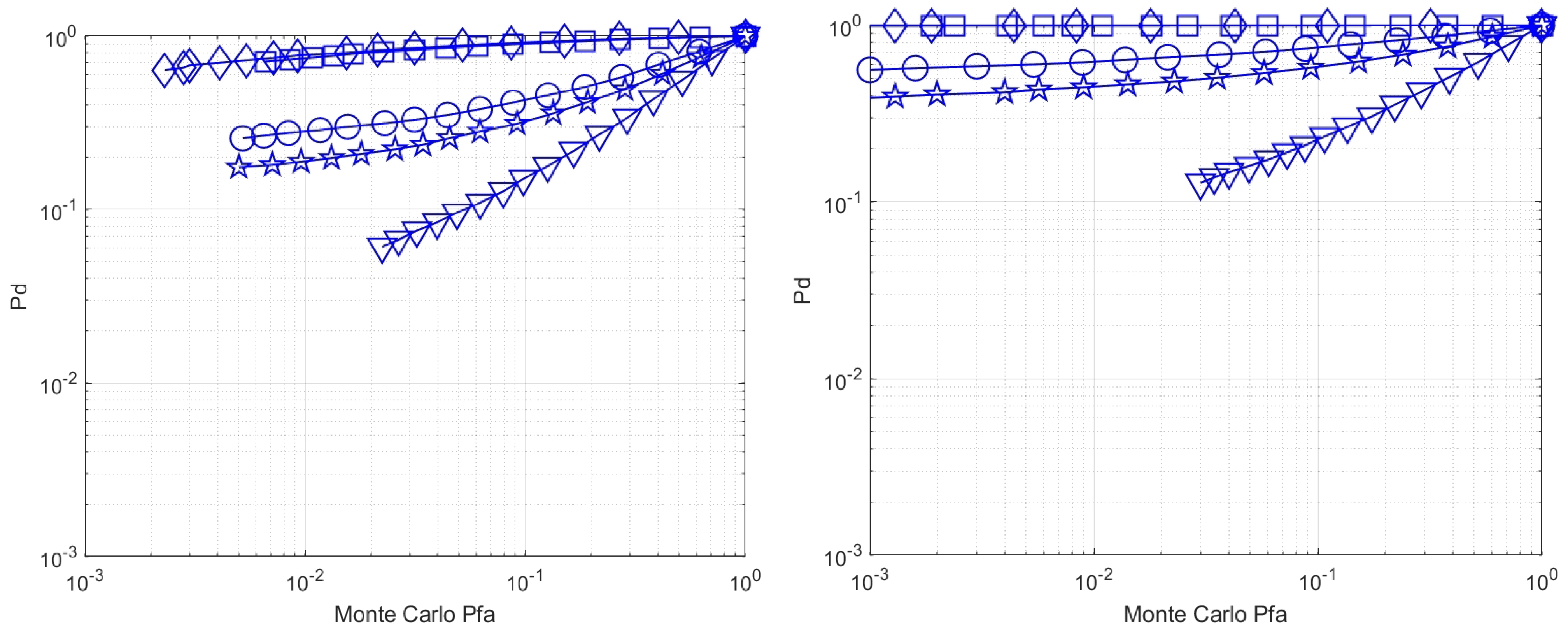
3.6. Receiver Operating Characteristic (ROC): Monte Carlo versus Monte Carlo
3.7. Monte Carlo versus Nominal or Design
4. Discussion
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
Abbreviations
| ACS | Almost-Cyclostationary |
| CDF | Cumulative Distribution Function |
| FOT | Fraction-of-Time |
| FSK | Frequency Shift Keyed |
| GLRT | Generalized Likelihood Ratio Test |
| HOCS | Higher-Order Cyclostationarity |
| LRT | Likelihood Ratio Test |
| MC | Monte Carlo |
| Probability Density Function | |
| QF | Quadratic Form |
| ROC | Receiver Operating Characteristic |
| SC | Single Cycle |
References
- Gardner, W.A. Statistical Spectral Analysis: A Nonprobabilistic Theory; Prentice-Hall: Englewood Cliffs, NJ, USA, 1987. [Google Scholar]
- Napolitano, A. Cyclostationary Processes and Time Series: Theory, Applications, and Generalizations; Elsevier: Amsterdam, The Netherlands, 2019. [Google Scholar] [CrossRef]
- Besicovitch, A.S. Almost Periodic Functions; Cambridge University Press: London, UK, 1932. [Google Scholar]
- Gardner, W.A. Signal interception: A unifying theoretical framework for feature detection. IEEE Trans. Commun. 1988, COM-36, 897–906. [Google Scholar] [CrossRef]
- Gardner, W.A.; Spooner, C.M. Signal interception: Performance advantages of cyclic feature detectors. IEEE Trans. Commun. 1992, 40, 149–159. [Google Scholar] [CrossRef]
- Gardner, W.A.; Spooner, C.M. Detection and source location of weak cyclostationary signals: Simplifications of the maximum-likelihood receiver. IEEE Trans. Commun. 1993, 41, 905–916. [Google Scholar] [CrossRef]
- Spooner, C.M.; Gardner, W.A. The cumulant theory of cyclostationary time-series. Part II: Development and applications. IEEE Trans. Signal Process. 1994, 42, 3409–3429. [Google Scholar] [CrossRef]
- Dandawaté, A.V.; Giannakis, G.B. Statistical tests for presence of cyclostationarity. IEEE Trans. Signal Process. 1994, 42, 2355–2369. [Google Scholar] [CrossRef]
- Napolitano, A. On cyclostationarity-based signal detection. In Proceedings of the XXVI European Signal Processing Conference (EUSIPCO 2018), Rome, Italy, 3–7 September 2018. [Google Scholar] [CrossRef]
- Hurd, H.L.; Gerr, N.L. Graphical methods for determining the presence of periodic correlation. J. Time Ser. Anal. 1991, 12, 337–350. [Google Scholar] [CrossRef]
- Enserink, S.; Cochran, D. On detection of cyclostationary signals. In Proceedings of the 1995 International Conference on Acoustics, Speech, and Signal Processing, Washington, DC, USA, 9–12 May 1995; Volume 3, pp. 2004–2007. [Google Scholar] [CrossRef]
- Sirianunpiboon, S.; Howard, S.D.; Cochran, D. Detection of cyclostationarity using generalized coherence. In Proceedings of the IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP 2018), Calgary, AB, Canada, 15–20 April 2018. [Google Scholar]
- Dehay, D.; Dudek, A.; Leskow, J. Subsampling for continuous-time almost periodically correlated processes. J. Stat. Plan. Inference 2014, 150, 142–158. [Google Scholar] [CrossRef]
- Kim, K.; Akbar, I.; Bae, K.; Um, J.S.; Spooner, C.; Reed, J. Cyclostationary Approaches to Signal Detection and Classification in Cognitive Radio. In Proceedings of the 2nd IEEE International Symposium on New Frontiers in Dynamic Spectrum Access Networks (DySPAN 2007), Washington, DC, USA, 17–20 April 2007; pp. 212–215. [Google Scholar] [CrossRef]
- Sutton, P.; Nolan, K.; Doyle, L. Cyclostationary Signatures in Practical Cognitive Radio Applications. IEEE J. Sel. Areas Commun. 2008, 26, 13–24. [Google Scholar] [CrossRef]
- Haykin, S.; Thomson, D.J.; Reed, J.H. Spectrum Sensing for Cognitive Radio. Proc. IEEE 2009, 97, 849–877. [Google Scholar] [CrossRef]
- Lundén, J.; Koivunen, V.; Huttunen, A.; Poor, H.V. Collaborative Cyclostationary Spectrum Sensing for Cognitive Radio Systems. IEEE Trans. Signal Process. 2009, 57, 4182–4195. [Google Scholar] [CrossRef]
- Cohen, D.; Eldar, Y.C. Sub-Nyquist Cyclostationary Detection for Cognitive Radio. IEEE Trans. Signal Process. 2017, 65, 3004–3019. [Google Scholar] [CrossRef]
- Yavorskyj, I.N.; Yuzefovych, R.; Kravets, I.B.; Matsko, I.Y. Properties of characteristics estimators of periodically correlated random processes in preliminary determination of the period of correlation. Radioelectron. Commun. Syst. 2012, 55, 335–348. [Google Scholar] [CrossRef]
- Javorskyj, I.; Dehay, D.; Kravets, I. Component statistical analysis of second order hidden periodicities. Digit. Signal Process. 2014, 26, 50–70. [Google Scholar] [CrossRef]
- Gardner, W.A. Statistically inferred time warping: Extending the cyclostationarity paradigm from regular to irregular statistical cyclicity in scientific data. EURASIP J. Adv. Signal Process. 2018, 2018, 59. [Google Scholar] [CrossRef]
- Napolitano, A. Time-Warped Almost-Cyclostationary Signals: Characterization and Statistical Function Measurements. IEEE Trans. Signal Process. 2017, 65, 5526–5541. [Google Scholar] [CrossRef]
- Das, S.; Genton, M.G. Cyclostationary Processes With Evolving Periods and Amplitudes. IEEE Trans. Signal Process. 2021, 69, 1579–1590. [Google Scholar] [CrossRef]
- Sun, R.B.; Du, F.P.; Yang, Z.B.; Chen, X.F.; Gryllias, K. Cyclostationary Analysis of Irregular Statistical Cyclicity and Extraction of Rotating Speed for Bearing Diagnostics With Speed Fluctuations. IEEE Trans. Instrum. Meas. 2021, 70, 3514011. [Google Scholar] [CrossRef]
- Leśkow, J.; Napolitano, A. Foundations of the functional approach for signal analysis. Signal Process. 2006, 86, 3796–3825. [Google Scholar] [CrossRef]
- Gardner, W.A. Cyclostationarity.com. 2018. Available online: https://cyclostationarity.com (accessed on 1 October 2023).
- Napolitano, A.; Gardner, W.A. Fraction-of-time probability: Advancing beyond the need for stationarity and ergodicity assumptions. IEEE Access 2022, 10, 34591–34612. [Google Scholar] [CrossRef]
- Gardner, W.A. Transitioning away from stochastic process models. J. Sound Vib. 2023, 565, 117871. [Google Scholar] [CrossRef]
- Kac, M.; Steinhaus, H. Sur les fonctions indépendantes (IV) (Intervalle infini). Stud. Math. 1938, 7, 1–15. [Google Scholar] [CrossRef]
- Kac, M. Statistical Independence in Probability, Analysis and Number Theory; The Mathematical Association of America: Washington, DC, USA, 1959. [Google Scholar]
- Gardner, W.A.; Brown, W.A. Fraction-of-time probability for time-series that exhibit cyclostationarity. Signal Process. 1991, 23, 273–292. [Google Scholar] [CrossRef]
- Gardner, W.A.; Spooner, C.M. The cumulant theory of cyclostationary time-series. Part I: Foundation. IEEE Trans. Signal Process. 1994, 42, 3387–3408. [Google Scholar] [CrossRef]
- Izzo, L.; Napolitano, A. The higher-order theory of generalized almost-cyclostationary time-series. IEEE Trans. Signal Process. 1998, 46, 2975–2989. [Google Scholar] [CrossRef]
- Miao, H.; Zhang, F.; Tao, R. A general fraction-of-time probability framework for chirp cyclostationary signals. Signal Process. 2021, 179, 107820. [Google Scholar] [CrossRef]
- Zemanian, A.H. Distribution Theory and Transform Analysis; Dover: New York, NY, USA, 1987. [Google Scholar]
- Dehay, D.; Leśkow, J.; Napolitano, A. Time average estimation in the fraction-of-time probability framework. Signal Process. 2018, 153, 275–290. [Google Scholar] [CrossRef]
- Parzen, E. On Estimation of a Probability Density Function and Mode. Ann. Math. Stat. 1962, 33, 1065–1076. [Google Scholar] [CrossRef]
- Rosenblatt, M. Curve Estimates. Ann. Math. Stat. 1971, 42, 1815–1842. [Google Scholar] [CrossRef]
- Serfling, R.J. Approximation Theorems of Mathematical Statistics; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 1980. [Google Scholar]
- Castellana, J.; Leadbetter, M. On smoothed probability density estimation for stationary processes. Stoch. Process. Their Appl. 1986, 21, 179–193. [Google Scholar] [CrossRef]
- Shevgunov, T.; Napolitano, A. Fraction-of-time density estimation based on linear interpolation of time series. In Proceedings of the 2021 Systems of Signals Generating and Processing in the Field of on Board Communications, Moscow, Russia, 16–18 March 2021. [Google Scholar] [CrossRef]
- Dehay, D. Spectral analysis of the covariance of the almost periodically correlated processes. Stoch. Process. Their Appl. 1994, 50, 315–330. [Google Scholar] [CrossRef]
- Dehay, D.; Leśkow, J. Functional limit theory for the spectral covariance estimator. J. Appl. Probab. 1996, 33, 1077–1092. [Google Scholar] [CrossRef]
- Leskow, J. Asymptotic normality of the spectral density estimators for almost periodically correlated stochastic processes. Stochatic Process. Their Appl. 1994, 52, 351–360. [Google Scholar] [CrossRef]
- Napolitano, A. Generalizations of Cyclostationary Signal Processing: Spectral Analysis and Applications; John Wiley & Sons Ltd.: Hoboken, NJ, USA; IEEE Press: Piscataway, NJ, USA, 2012. [Google Scholar] [CrossRef]
- Shevgunov, T.; Efimov, E.; Guschina, O. Estimation of a Spectral Correlation Function Using a Time-Smoothing Cyclic Periodogram and FFT Interpolation–2N-FFT Algorithm. Sensors 2023, 23, 215. [Google Scholar] [CrossRef] [PubMed]
- Dandawaté, A.V.; Giannakis, G.B. Nonparametric polyspectral estimators for kth-order (almost) cyclostationary processes. IEEE Trans. Inf. Theory 1994, 40, 67–84. [Google Scholar] [CrossRef]
- Dandawaté, A.V.; Giannakis, G.B. Asymptotic theory of mixed time averages and kth-order cyclic-moment and cumulant statistics. IEEE Trans. Inf. Theory 1995, 41, 216–232. [Google Scholar] [CrossRef]
- Spooner, C.M. Cyclostationary Signal Processing: Understanding and Using the Statistics of Communication Signals. 2015. Available online: https://cyclostationary.blog (accessed on 1 October 2023).
- Picinbono, B. Second-order complex random vectors and normal distributions. IEEE Trans. Signal Process. 1996, 44, 2637–2640. [Google Scholar] [CrossRef]
- Van Trees, H.L. Detection, Estimation, and Modulation Theory. Part I; John Wiley & Sons, Inc.: New York, NY, USA, 1971. [Google Scholar]
- Huang, G.; Tugnait, J.K. On Cyclostationarity Based Spectrum Sensing Under Uncertain Gaussian Noise. IEEE Trans. Signal Process. 2013, 61, 2042–2054. [Google Scholar] [CrossRef]




Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dehay, D.; Leśkow, J.; Napolitano, A.; Shevgunov, T. Cyclic Detectors in the Fraction-of-Time Probability Framework. Inventions 2023, 8, 152. https://doi.org/10.3390/inventions8060152
Dehay D, Leśkow J, Napolitano A, Shevgunov T. Cyclic Detectors in the Fraction-of-Time Probability Framework. Inventions. 2023; 8(6):152. https://doi.org/10.3390/inventions8060152
Chicago/Turabian StyleDehay, Dominique, Jacek Leśkow, Antonio Napolitano, and Timofey Shevgunov. 2023. "Cyclic Detectors in the Fraction-of-Time Probability Framework" Inventions 8, no. 6: 152. https://doi.org/10.3390/inventions8060152