
A New Random Positioning Machine Modification Applied for Microgravity Simulation in Laboratory Experiments with Rats


Abstract
:1. Introduction
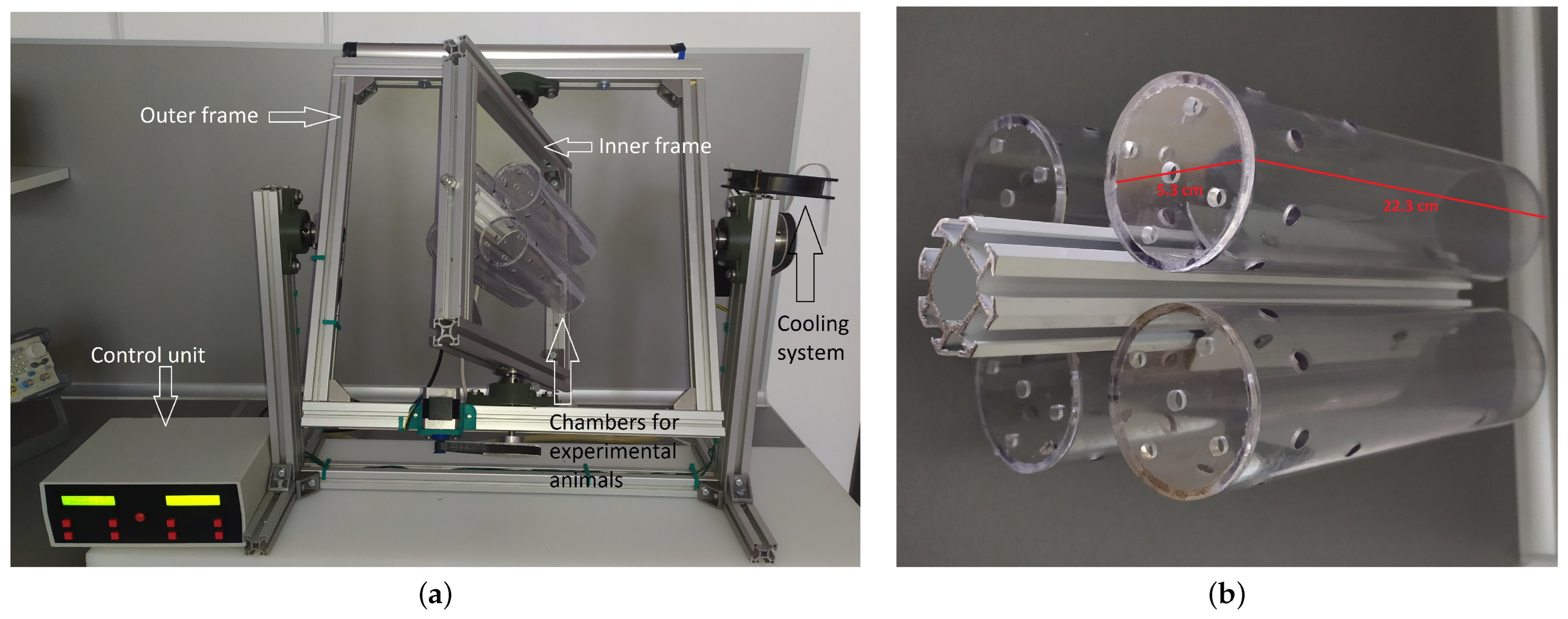
2. Description of the Machine
2.1. Design of the Machine
2.2. Theoretical Description
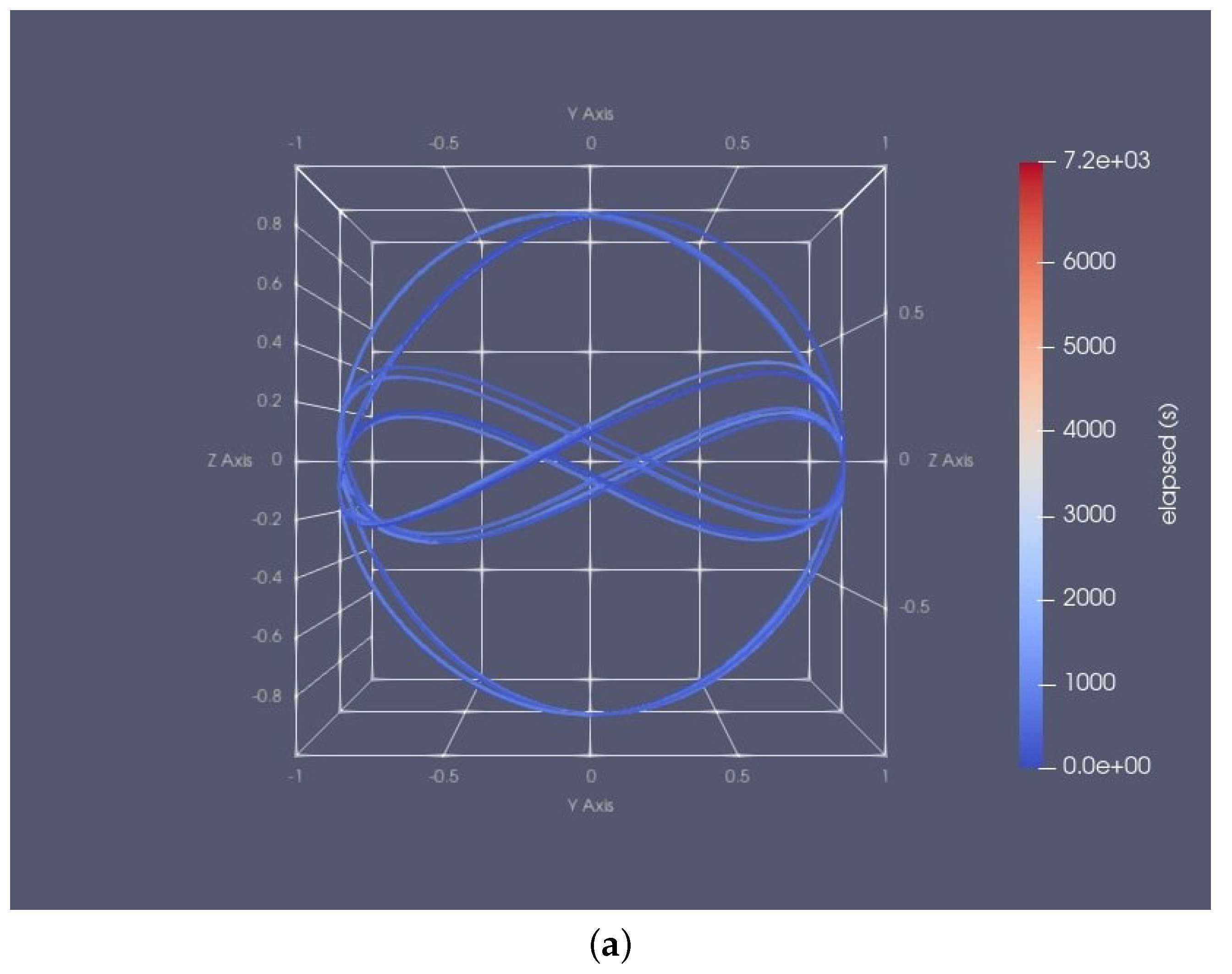
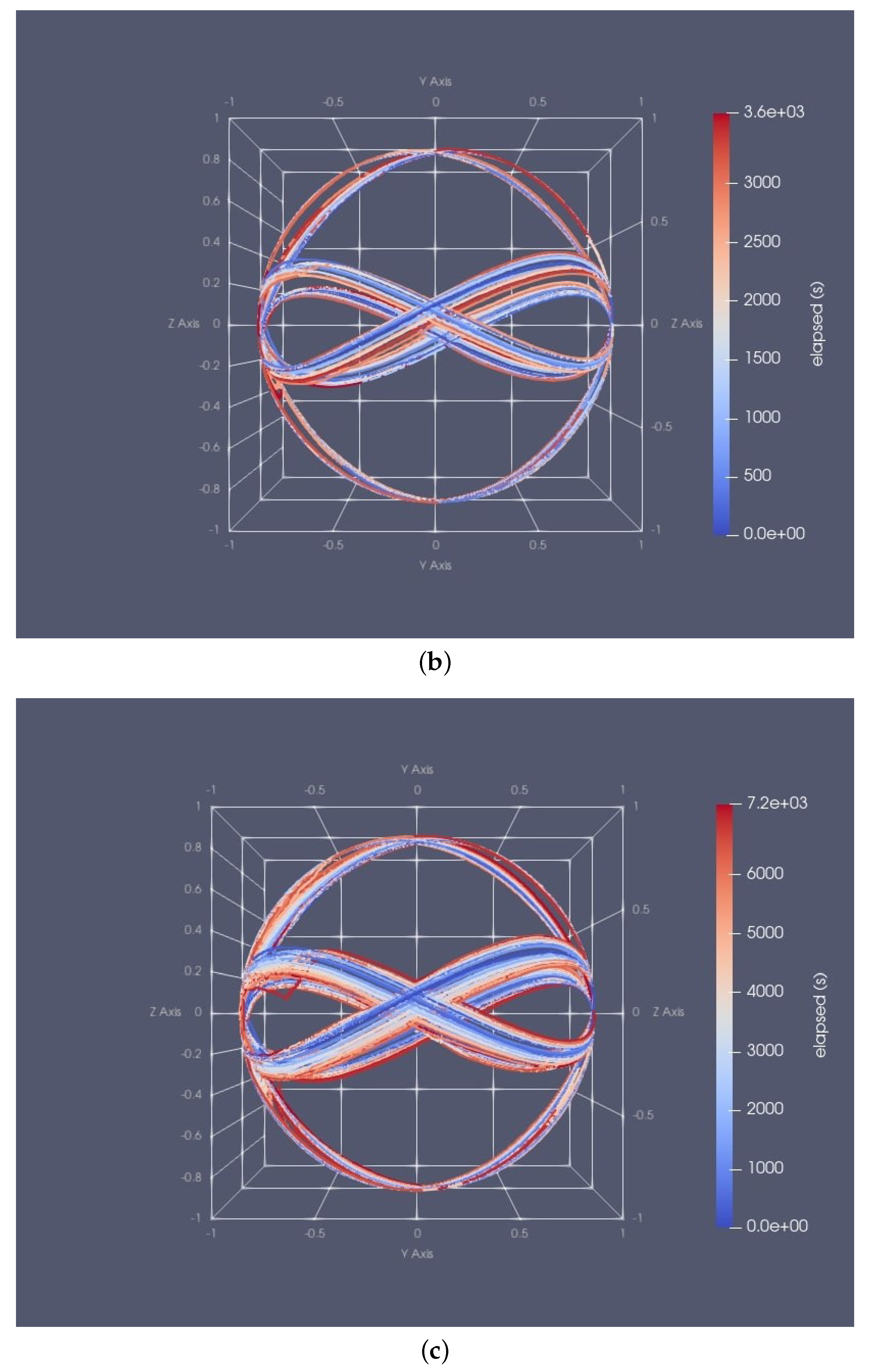
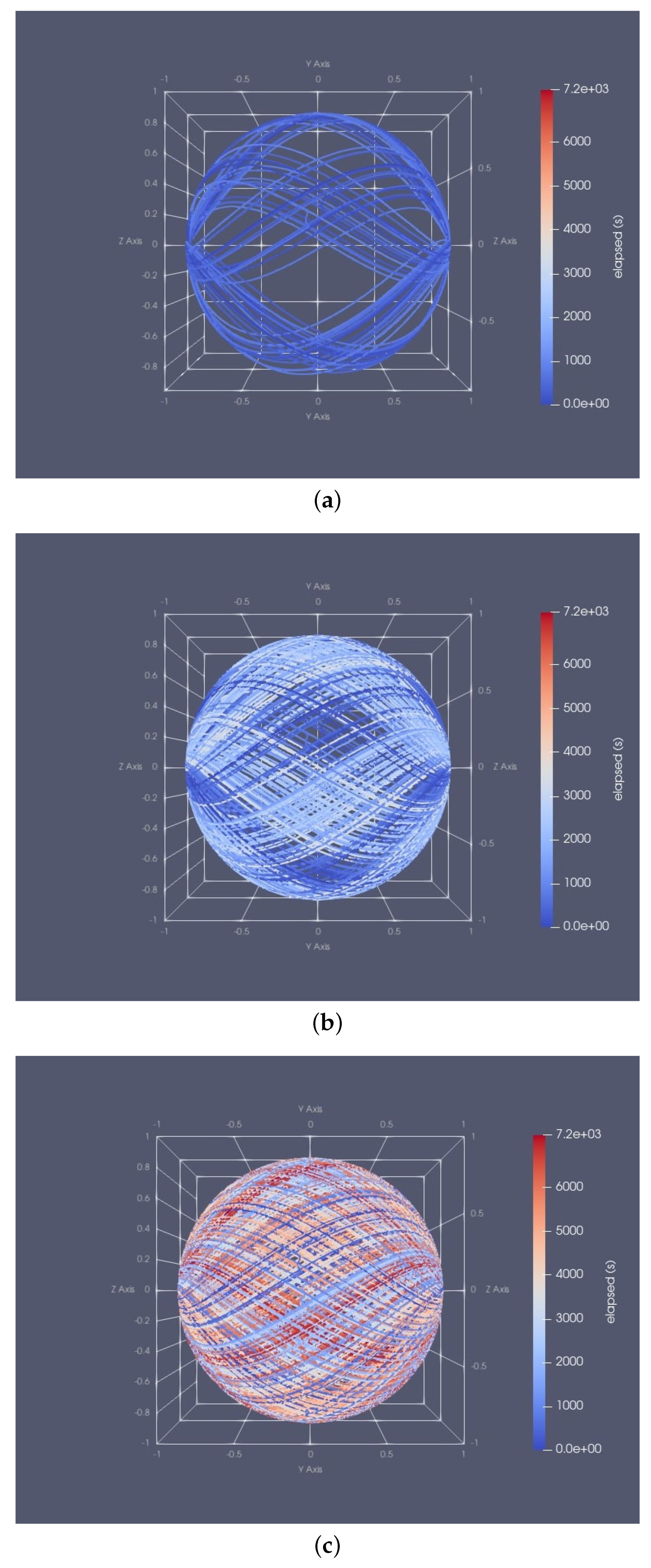
2.3. Gravity Vector Tip Dispersion and taSMG
3. Application in a Laboratory Experiment with Rats
3.1. Description of the Experiment
3.2. Weight and Stress Evaluation
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A






References
- Petrov, V.M. Problems and conception of ensuring radiation safety during Mars missions. Adv. Space Res. 2004, 34, 1451–1454. [Google Scholar] [CrossRef] [PubMed]
- Baevsky, R.; Moser, M.; Nikulina, G.; Polyakov, V.V.; Funtova, I.; Chernikova, A.G. Autonomic regulation of circulation and cardiac contractility during a 14-month space flight. Acta Astronaut. 1998, 42, 159–173. [Google Scholar] [CrossRef]
- Fitts, R.H.; Trappe, S.W.; Costill, D.L.; Gallagher, P.M.; Creer, A.C.; Colloton, P.A.; Peters, J.R.; Romatowski, J.G.; Bain, J.L.; Riley, D.A. Prolonged space flight-induced alterations in the structure and function of human skeletalmuscle fibres. J. Physiol. 2010, 588, 3567–3592. [Google Scholar] [CrossRef] [PubMed]
- Riley, D.A.; Bain, J.L.W.; Thompson, J.L.; Fitts, R.H.; Widrick, J.J.; Trappe, S.W.; Trappe, T.A.; Costill, D.L. Decreased thin filament density and length in human atrophic soleus muscle fibers after spaceflight. J. Appl. Physiol. 2000, 88, 567–572. [Google Scholar] [CrossRef]
- Trappe, S.W.; Trappe, T.; Lee, G.A.; Widrick, D.J.J.; Costill, L.; Fitts, R.H. Comparison of a space shuttle flight (STS-78) and bed rest on human muscle function. J. Appl. Physiol. 2001, 91, 57–64. [Google Scholar] [CrossRef]
- Ronca, A.E.; Moyer, E.L.; Talyansky, Y.; Lowe, M.; Padmanabhan, S.; Choi, S.; Gong, C.; Cadena, S.M.; Stodieck, L.; Globus, R.K. Behavior of mice aboard the International Space Station. Sci. Rep. 2019, 9, 4717. [Google Scholar] [CrossRef]
- Temple, M.; Kosik, K.; Steward, O. Spatial learning and memory is preserved in rats after early development in a microgravity environment. Neurobiol. Learn. Mem. 2002, 78, 199–216. [Google Scholar] [CrossRef]
- Orr, S.; Weigand, R.; Adams, T.; Raychev, R.; Griko, Y. Environmental Enrichment in the ISS Rodent Habitat Hardware System. Int. J. Biosci. Med. 2017, 1, 6. [Google Scholar] [CrossRef]
- Zhang, Y.; Wang, Q.; Chen, H.; Liu, X.; Lv, K.; Wang, T.; Wang, Y.; Ji, G.; Cao, H.; Kan, G.; et al. Involvement of Cholinergic Dysfunction and Oxidative Damage in the Effects of Simulated Weightlessness on Learning and Memory in Rats. BioMed Res. Intl. 2018, 2018, 2547532. [Google Scholar] [CrossRef]
- Pani, G.; Samari, N.; Quintens, R.; de Saint-Georges, L.; Meloni, M.; Baatout, S.; Van Oostveldt, P.; Benotmane, M. Morphological and Physiological Changes in Mature In Vitro Neuronal Networks towards Exposure to Short-, Middle- or Long-Term Simulated Microgravity. PLoS ONE 2013, 8, e73857. [Google Scholar] [CrossRef] [Green Version]
- Bevelacqua, J.J.; Welsh, J.; Mortazavi, S. Comment on “Dexamethasone Inhibits Spheroid Formation of Thyroid Cancer Cells Exposed to Simulated Microgravity”. Cells 2020, 9, 1738. [Google Scholar] [CrossRef] [PubMed]
- van Loon, J.J.W.A. Some history and use of the random positioning machine, RPM, in gravity related research. Adv. Space Res. 2007, 39, 1161–1165. [Google Scholar] [CrossRef]
- Scano, A. Effeti di una variazione continua del campo gravitazionale sullo svoluppo ed accrescimento di Lathyrus Odororatus. In Proceedings of the Communication at 6th International and 12th European Congress on Aeronautical and Space Medicine, Rome, Italy, October 1963. [Google Scholar]
- Murakami, S.; Yamada, M. Architecture of statocytes and chloroplasts under the microgravity environment. Jap. Soc. Biol. Sci. Space 1988, 2, 301. [Google Scholar]
- Hoson, T.; Kamisaka, S.; Masuda, Y.; Yamashita, M. Changes in plant growth process under microgravity conditions simulated by a three-dimensional clinostat. Bot. Mag. Tokyo 1992, 105, 53–70. [Google Scholar] [CrossRef]
- Borst, A.; van Loon, J. Technology and developments for the Random Positioning Machine, RPM. Microgravity Sci. Technol. 2009, 21, 287–292. [Google Scholar] [CrossRef]
- Hemmersbach, R.; Strauch, S.; Seibt, D.; Schuber, M. Comparative studies on gravisensitive protists on ground (2D and 3D clinostats) and in microgravity. Microgravity Sci. Technol. 2006, 18, 257–259. [Google Scholar] [CrossRef]
- Wuest, S.L.; Richard, S.; Kopp, S.; Grimm, D.; Egli, M. Simulated Microgravity: Critical Review on the Use of Random Positioning Machines for Mammalian Cell Culture. BioMed Res. Int. 2015, 2015, 971474. [Google Scholar] [CrossRef]
- Mogil, J.S. The translatability of pain across species. Phil. Trans. R. Soc. B 2019, 374, 20190286. [Google Scholar] [CrossRef]
- Schweinfurth, M.K. The social life of Norway rats (Rattus norvegicus). eLife 2020, 9, 54020. [Google Scholar] [CrossRef]
- Wrighten, S.A.; Hall, C.R. Support for Altruistic Behavior in Rats. Open J. Soc. Sci. 2016, 4, 93–102. [Google Scholar] [CrossRef]
- Swanson, H.H.; Schuster, R. Cooperative social coordination and aggression in male laboratory rats: Effects of housing and testosterone. Horm. Behav. 1987, 21, 310–330. [Google Scholar] [CrossRef]
- Fox, M.D.; Corbetta, M.; Snyder, A.Z.; Vincent, J.L.; Raichle, M.E. Spontaneous neuronal activity distinguishes human dorsal and ventral attention systems. Proc. Natl. Acad. Sci. USA 2006, 103, 10046–10051. [Google Scholar] [CrossRef] [PubMed]
- Girbovan, C.; Plamondon, H. Environmental enrichment in female rodents: Considerations in the effects on behavior and biochemical markers. Behav. Brain Res. 2013, 253, 178–190. [Google Scholar] [CrossRef] [PubMed]
- Lahvis, G.P. Point of View: Unbridle biomedical research from the laboratory cage. eLife 2017, 6, 27438. [Google Scholar] [CrossRef]
- Laviola, G.; Hannan, A.J.; Macrì, S.; Solinas, M.; Jaber, M. Effects of enriched environment on animal models of neurodegenerative diseases and psychiatric disorders. Neurobiol. Dis. 2008, 31, 159–168. [Google Scholar] [CrossRef]
- Simpson, J.; Kelly, J.P. The impact of environmental enrichment in laboratory rats—Behavioural and neurochemical aspects. Behav. Brain Res. 2011, 222, 246–264. [Google Scholar] [CrossRef]
- Sengupta, P. The Laboratory Rat: Relating Its Age with Human’s. Int. J. Prev. Med. 2013, 4, 624–630. [Google Scholar]
- Kim, T.Y. Theoretical study on microgravity and hypogravity simulated by random positioning machine. Acta Astronaut. 2020, 177, 684–696. [Google Scholar] [CrossRef]
- Russomano, T.; Cardoso, R.; Falcao, F.; Dalmarco, G.; Santos, C.D.; Santos, L.D.; de Azevedo, D.; Santos, M.D.; Martinelli, L.; Motta, J.; et al. Development and Validation of a 3 D Clinostat for the Study of Cells during Microgravity Simulation. In Proceedings of the IEEE Engineering in Medicine and Biology 27th Annual Conference, Shanghai, China, 17–18 January 2006; pp. 564–566. [Google Scholar] [CrossRef]
- Kim, Y.; Jeong, A.; Kim, M.; Lee, C.; Ye, S.; Kim, S. Time-averaged simulated microgravity (taSMG) inhibits proliferation of lymphoma cells, L-540 and HDLM-2, using a 3D clinostat. Biomed. Eng. Online 2017, 16, 48. [Google Scholar] [CrossRef]
- Peana, A.; Chessa, M.; Deligios, M.; Cesarone, C.; Meloni, M.; Pippia, P. Effects of simulated microgravity conditions on carrageenin-induced oedema in rat. J. Gravit. Physiol. 2002, 9, 299–300. [Google Scholar]
- Saba, A.; Pani, G.; Galleri, G.; Meloni, M.; Pippia, P. “In vivo” physiological experiments in simulated microgravity conditions on rat bon marrow cells mineralization. J. Biol. Res. 2009, 82, 22–24. [Google Scholar] [CrossRef]
- Ayachit, U. The ParaView Guide: A Parallel Visualization Application; Kitware: Clifton Park, NY, USA, 2015. [Google Scholar]
- van Loon, J.J.W.A.; Folgering, E.H.; Bouten, C.V.; Veldhuijzen, J.P.; Smit, T.H. Inertial shear forces and the use of centrifuges in gravity research. What is the proper control? J. Biomech. Eng. 2003, 125, 342–346. [Google Scholar] [CrossRef] [PubMed]
- Ferranti, F.; Del Bianco, M.; Pacelli, C. Advantages and Limitations of Current Microgravity Platforms for Space Biology Research. Appl. Sci. 2021, 11, 68. [Google Scholar] [CrossRef]
- Harris, R.; Mitchell, T.; Simpson, J.; Redmann, S., Jr.; Youngblood, B.; Ryan, D. Weight loss in rats exposed to repeated acute restraint stress is independent of energy or leptin status. Am. J. Physiol. Regul. Integr. Comp. Physiol. 2002, 82, 77–88. [Google Scholar] [CrossRef]
- Koob, G.F.; Zimmer, A. Chapter 9—Animal models of psychiatric disorders. In Neurobiology of Psychiatric Disorders; Aminoff, M.J., Boller, F., Swaab, D.F., Eds.; Handbook of Clinical Neurology; Elsevier: Amsterdam, The Netherlands, 2012; Volume 106, pp. 137–166. [Google Scholar] [CrossRef]
- Pellow, S.; Chopin, P.; File, S.E.; Briley, M. Validation of open:closed arm entries in an elevated plus-maze as a measure of anxiety in the rat. J. Neurosci. Methods 1985, 14, 149–167. [Google Scholar] [CrossRef]
- Kokhan, V.; Matveeva, M.; Bazyan, A.; Kudrin, V.; Mukhametov, A.; Shtemberg, A. Combined effects of antiorthostatic suspension and ionizing radiation on the behaviour and neurotransmitters changes in different brain structures of rats. Behav. Brain Res. 2017, 320, 473–483. [Google Scholar] [CrossRef]
- Bellone, J.A.; Gifford, P.S.; Nishiyama, N.C.; Hartman, R.E.; Mao, X.W. Long-term effects of simulated microgravity and/or chronic exposure to low-dose gamma radiation on behavior and blood–brain barrier integrity. NPJ Microgravity 2016, 2, 16019. [Google Scholar] [CrossRef]
- Rao, L.; Zhou, Y.; Liang, Z.; Rao, H.; Zheng, R.; Sun, Y.; Tan, C.; Xiao, Y.; Tian, Z.; Chen, X.; et al. Decreasing ventromedial prefrontal cortex deactivation in risky decision making after simulated microgravity: Effects of −6B∘ head-down tilt bed rest. Front. Behav. Neurosci. 2014, 8, 187. [Google Scholar] [CrossRef]
- Lebedeva-Georgievskaya, K.B.; Kokhan, V.S.; Shurtakova, A.K.; Perevezentsev, A.A.; Kudrin, V.S.; Shtemberg, A.S.; Bazyan, A.S. The Neurobiological Effects of the Combined Impact of Anti-Orthostatic Hanging and Different Ionizing Irradiations. Neurochem. J. 2019, 13, 302–311. [Google Scholar] [CrossRef]
- Shang, X.; Xu, B.; Li, Q.; Zhai, B.; Xu, X.; Zhang, T. Neural oscillations as a bridge between glutamatergic system and emotional behaviors in simulated microgravity-induced mice. Behav. Brain Res. 2017, 317, 286–291. [Google Scholar] [CrossRef]
- Andreev-Andrievskiy, A.; Dolgov, O.; Alberts, J.; Popova, A.; Lagereva, E.; Anokhin, K.; Vinogradova, O. Mice display learning and behavioral deficits after a 30-day spaceflight on Bion-M1 satellite. Behav. Brain Res. 2022, 419, 113682. [Google Scholar] [CrossRef] [PubMed]



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Distance from the Center [cm] | (Inner Frame) [rad/s] | (Outer Frame) [rad/s] | taSMG [g] | |
|---|---|---|---|---|
| 0 | 0.0524 | 0.1060 | 0.494 | 0.273 |
| 0 | 0.1575 | 0.2615 | 0.602 | 0.0033 |
| 0 | 0.2092 | 0.1581 | 1.323 | 0.0464 |
| 0 | 0.2111 | 0.2111 | 1 | 0.2713 |
| 3.5 | 0.0524 | 0.1060 | 0.505 | 0.211 |
| 3.5 | 0.1575 | 0.2615 | 0.592 | 0.0050 |
| 3.5 | 0.2092 | 0.1581 | 1.346 | 0.0473 |
| 3.5 | 0.2111 | 0.2111 | 1 | 0.2855 |
| Distance from the Center [cm] | (Inner Frame) [rad/s] | (Outer Frame) [rad/s] | Periods of the Frames | taSMG [g] |
|---|---|---|---|---|
| 0 | 0.0524 to 0.733 | 0.0524 to 0.733 | 1 to 10 | 0.0018 |
| 3.5 | 0.0524 to 0.733 | 0.0524 to 0.733 | 1 to 10 | 0.0027 |
| Group | Day 1 | Day 2 | Day 3 | Day 4 | Day 5 | Day 6 | Day 7 |
|---|---|---|---|---|---|---|---|
| RPM | 100 | ||||||
| RPM-K | 100 | ||||||
| K | 100 |
| Group | RPM | RPM-K | K |
|---|---|---|---|
| Time [s] |
| Group | Number of Entries To Open Arms | Time in Open Spaces [s] | Number of Entries To Closed Arms | Time in Closed Spaces [s] |
|---|---|---|---|---|
| RPM | ||||
| RPM-K | ||||
| K |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Yotov, V.V.; Marovska, J.; Turiyski, V.; Ivanov, S.I. A New Random Positioning Machine Modification Applied for Microgravity Simulation in Laboratory Experiments with Rats. Inventions 2022, 7, 85. https://doi.org/10.3390/inventions7030085
Yotov VV, Marovska J, Turiyski V, Ivanov SI. A New Random Positioning Machine Modification Applied for Microgravity Simulation in Laboratory Experiments with Rats. Inventions. 2022; 7(3):85. https://doi.org/10.3390/inventions7030085
Chicago/Turabian StyleYotov, Viktor V., Jivka Marovska, Valentin Turiyski, and Stoil I. Ivanov. 2022. "A New Random Positioning Machine Modification Applied for Microgravity Simulation in Laboratory Experiments with Rats" Inventions 7, no. 3: 85. https://doi.org/10.3390/inventions7030085