1. Introduction
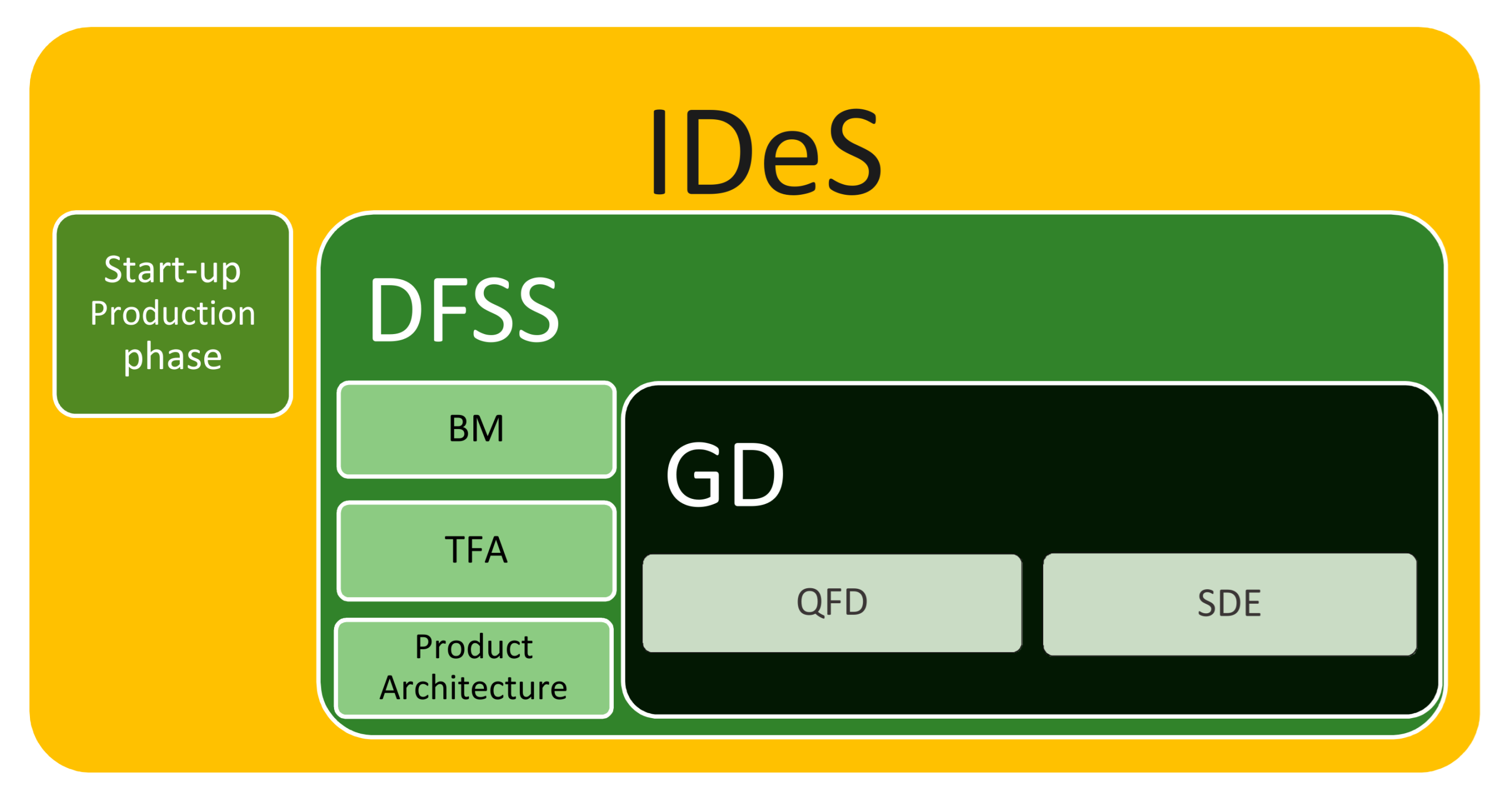
This work illustrates a new and innovative methodology for the development of an industrial project through the use of advanced design techniques. Generative Design (GD) is a methodology that uses tools such as Quality Functions Deployment (QFD) or Stylistic Design Engineering (SDE) to help engineers and designers to develop a new product. Over time, the GD methodology has evolved into the more modern Design for Six Sigma (DFSS) methodology, deployed in with the product development phases through the use of other tools such as Benchmarking (BM), Top–flop Analysis (TFA) and Product Architecture [
1,
2]. Furthermore, as GD methodology proved to be a valid choice to design for applications, it does not involve other key company areas to seamlessly integrate the design criteria across all production and manufacturing departments. The evolution of GD approach is called Industrial Design Structure (IDeS).
Moreover, this document aims to explain the application of the IDeS methodology for product development. IDeS is a design-based method to gather the appropriate organization structure needed to seamlessly develop a product designed accurately for a specific market segment, and that needs to be put into production in a short time. Therefore, IDeS methodology would organize the design steps of industrial projects, allowing to generate a link between the design structure and the company organization. With this process, IDeS methodology proves to deliver a customer-centered product by taking into account the industrialization part, which is of great importance in order to throw a high quality product that would be economically feasible to the organization.
Figure 1 summarizes the IDeS methodology as a procedure which involves both product development and start-up phases, leading to adopt a different company organization. This method is an evolution from past, well-known design methodologies like QFD and SDE, which englobe the GD approach, and DFSS that has been accepted by industries worldwide for reaching high quality levels, by using tools like the Top–Flop Analysis (TFA), Benchmarking (BM) and Product Architecture deployment. Different research findings about the application of this methodologies demonstrated the objective to gather a full project concept approach to provide the designer with a scheme that could guide them through the work for best results across all departments [
3,
4,
5,
6]. However, it can be used across many industries such as automotive, electronics, information technology, marketing, waste management and medical plants.
The development and diffusion of the methodology are demonstrated by the increasing presence of scientific articles dealing with this topic. Research conducted by Javid Butt [
7] deals with the implementation of enabling technologies of industry 4.0 through Lean Six Sigma approaches. To this end, he considered the best practices existing in the field of marketing and management of production technology. The methodologies examined include the Quality Function Deployment (QFD) and Design for Six Sigma (DFSS) approach.
Similarly, O.M. Ikumapayi et al. and E.V. Gijo et al. [
8,
9] compared the results produced in the field of Six Sigma by the most recent methodologies that help organizations to reduce defects whilst reducing overall cycle time.
Likewise, the work conducted by Siddra Qayyum [
10] compares the DMADV methodology [
11,
12] with the DFSS methodology. The first considers the development of products that do not yet satisfy the customer’s aspiration. Conversely, the DFSS methodology aims to optimize production processes based on customer needs. An example of application of the methodology is given by the work of I.A. Daniyan et al. [
13] that uses the interactive approach of acquisition, data processing and exchange of ideas between users and the system, typical of the DFSS methodology to create internal and external accessories for railway wagons. A second application example is provided by Ana Luisa Oliveira da Nóbrega Costa et al. [
14], who designed an assistive device that allows people with quadriplegia to play Paralympic tennis.
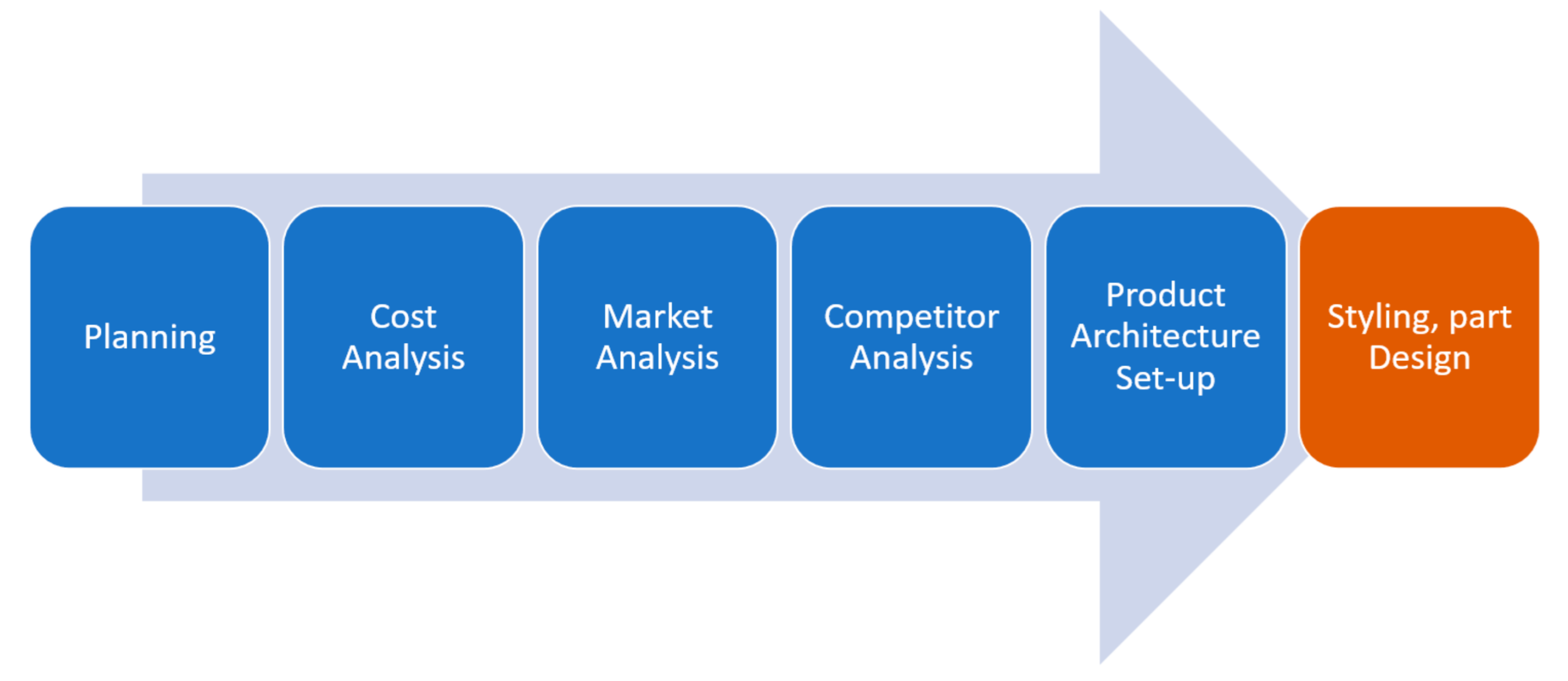
Subsequently, previous research has been performed with the intention of expanding previously known design methodologies, like SDE [
3] and QFD, towards IDeS methodology by means of including additional production-wise approaches. Trials have been made about conceiving a futuristic family car [
5], a city car [
15] and a futuristic mobility solution [
16], solutions of which started to build up the design approach together with the feedback of other project development areas including production. The proposed product set-up phases can be seen in
Figure 2. Later, a description of GD was made by Briard, Segonds and Zamariola [
17] as a set of know-hows which would indicate the main design parameters, or to optimize an existing design, in order to take on previous defined criteria by the end user. This approach to a design decision rules out that a complete analysis must be taken prior to beginning to analyze the different design options of the part. The research of Marinov et al. [
18] states that the GD approach is keen to synthetize design choices by analyzing the whole part in order to reach objectives. This approach could also be useful to gather every relevant input of the part, like simulation parameters, comparison criteria and final market scope decisions.
Meanwhile, recent discoveries about the application of numerical methods would allow to improve the development of compact communication devices with the Beam Propagation Method (BPM) by means of a new compact wavelength demultiplexer by Malka [
19], which allows to implement a communication device that uses a slot-waveguide that also overcomes path-loss, allowing to obtain a high bit rate, supporting to transmit light without restriction losses. Another method, this time applying the Finite-difference time-domain (FDTD), could also aim to combine multiple coherent sources on integrated circuits [
20].
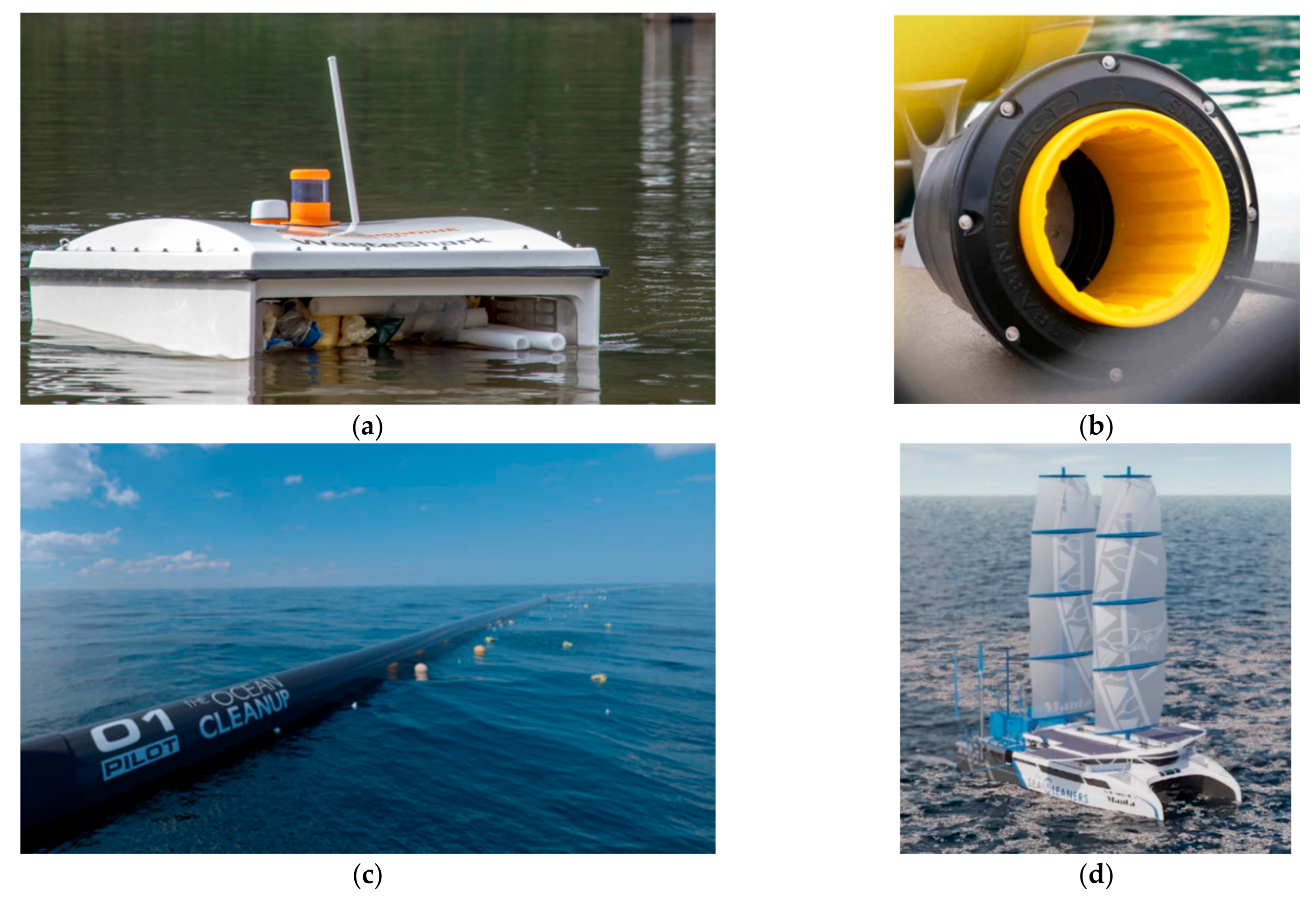
Nevertheless, in recent years, due to the increase in global plastic production and poor waste collection, marine pollution has increased significantly. To date, however, few reports have focused on the development and mobilization of technologies that harvest marine plastic pollution [
21,
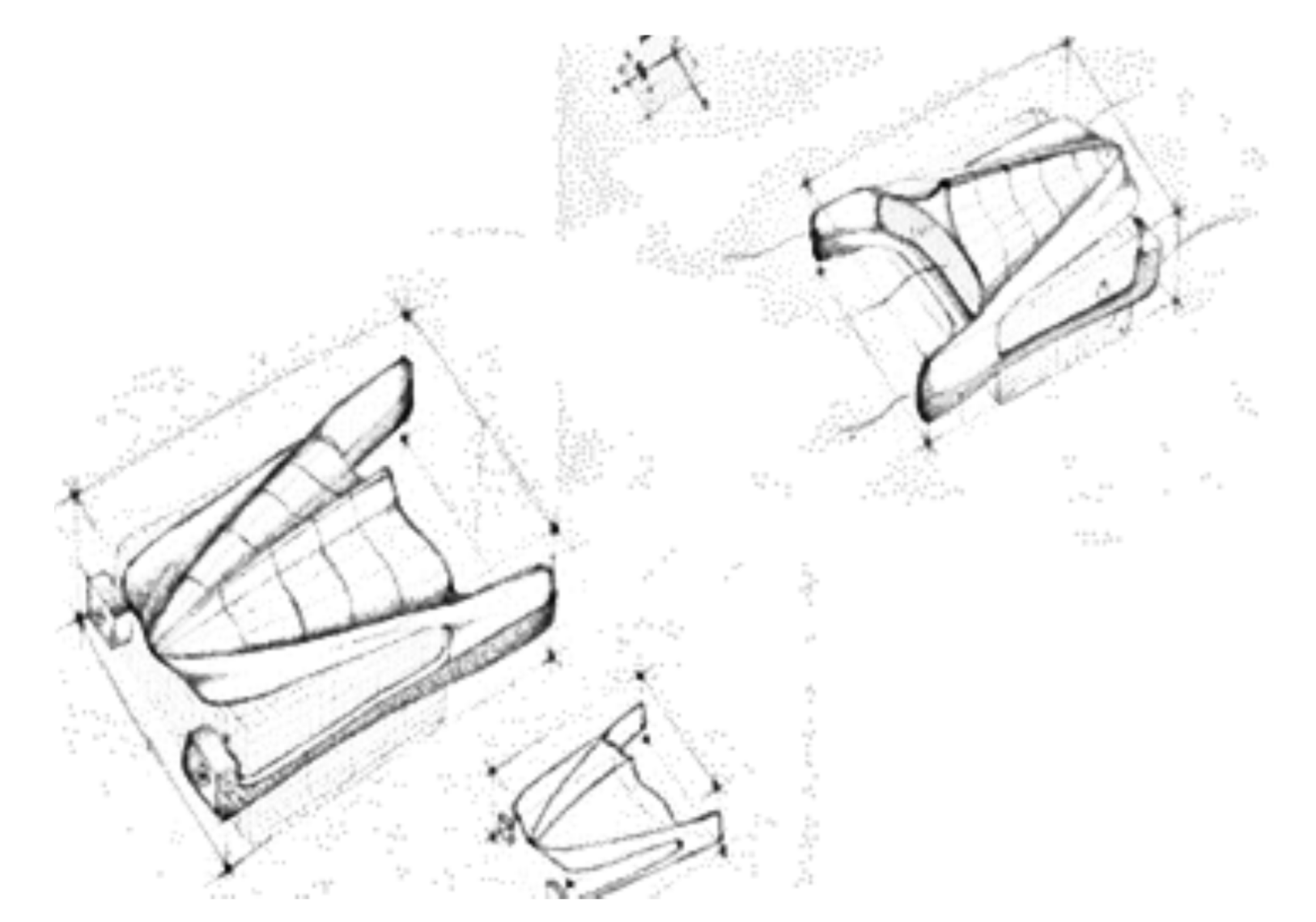
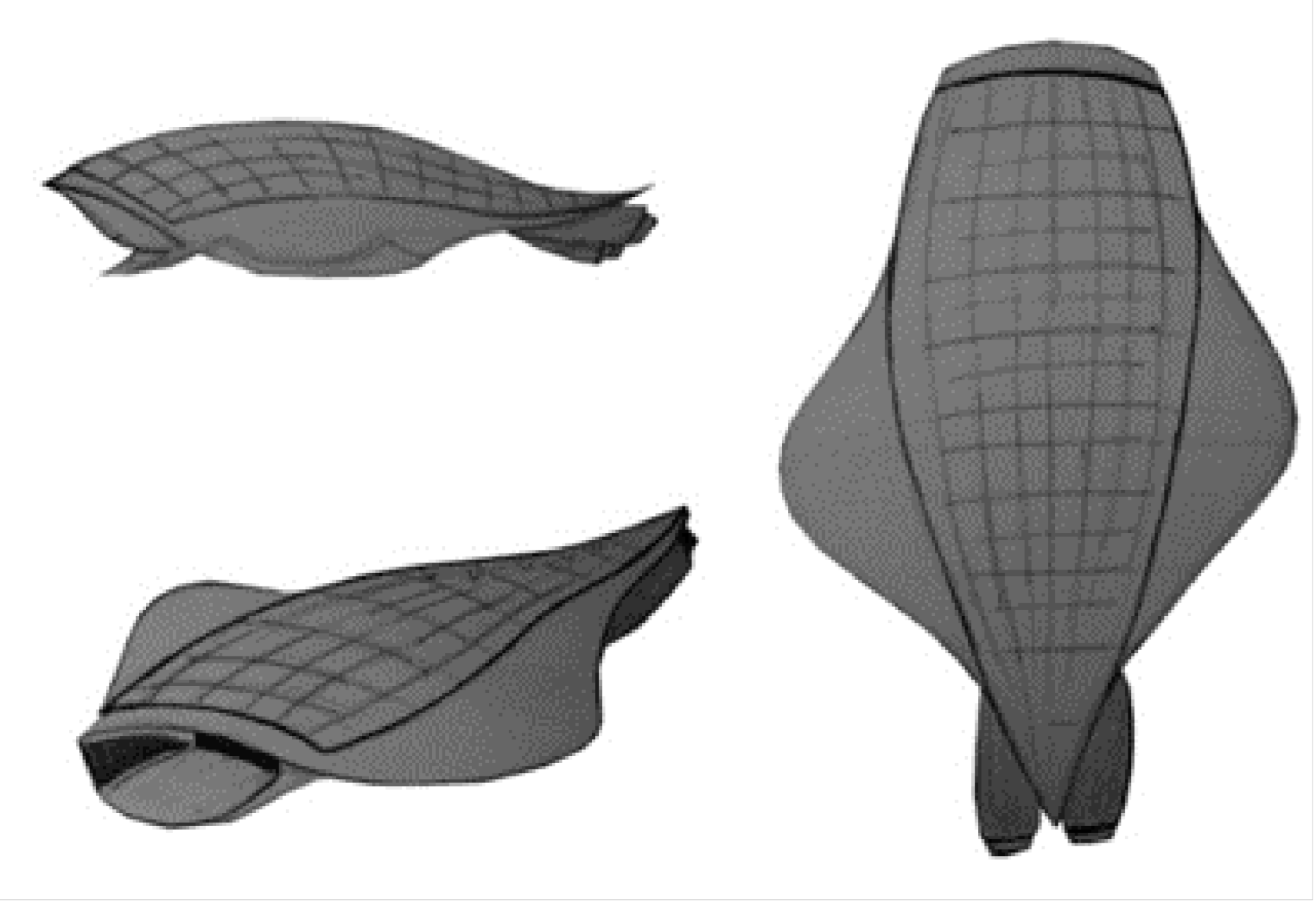
22]. This case study was considered for an application of the IDeS methodology. Consequently, the design of a drone for plastic recovery at sea can be revealed as an answer to fill this gap. This study explains how the IDeS methodology was applied to the design of a Plastic Recovery Drone (PRD) on the basis of a careful environmental and market analysis that represents an innovative solution to the problem of marine pollution.
3. Results
The technical characteristics necessary for the design of the drone emerged from the What–How matrix: autonomy, capacity, recovery and control.
Table 8 shows a Top–Flop analysis performed in the last design phase. An innovative product has been obtained through the IdeS method as the total (Δ) resulting from the Top–Flop analysis of the prototype is equal to 4 (>3). In addition, the main features of the new product include autonomy, recovery and control. Satisfactory results were obtained.
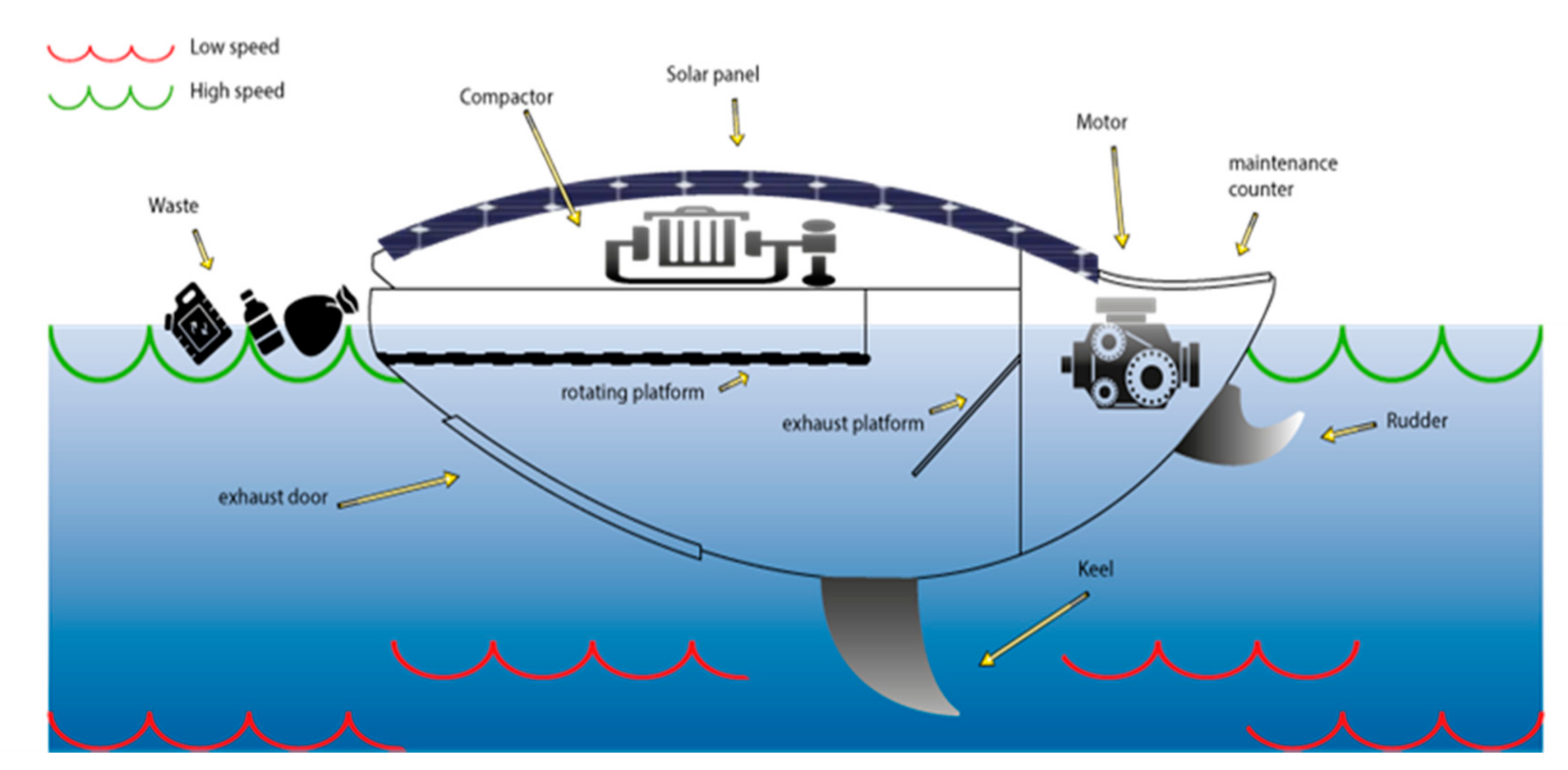
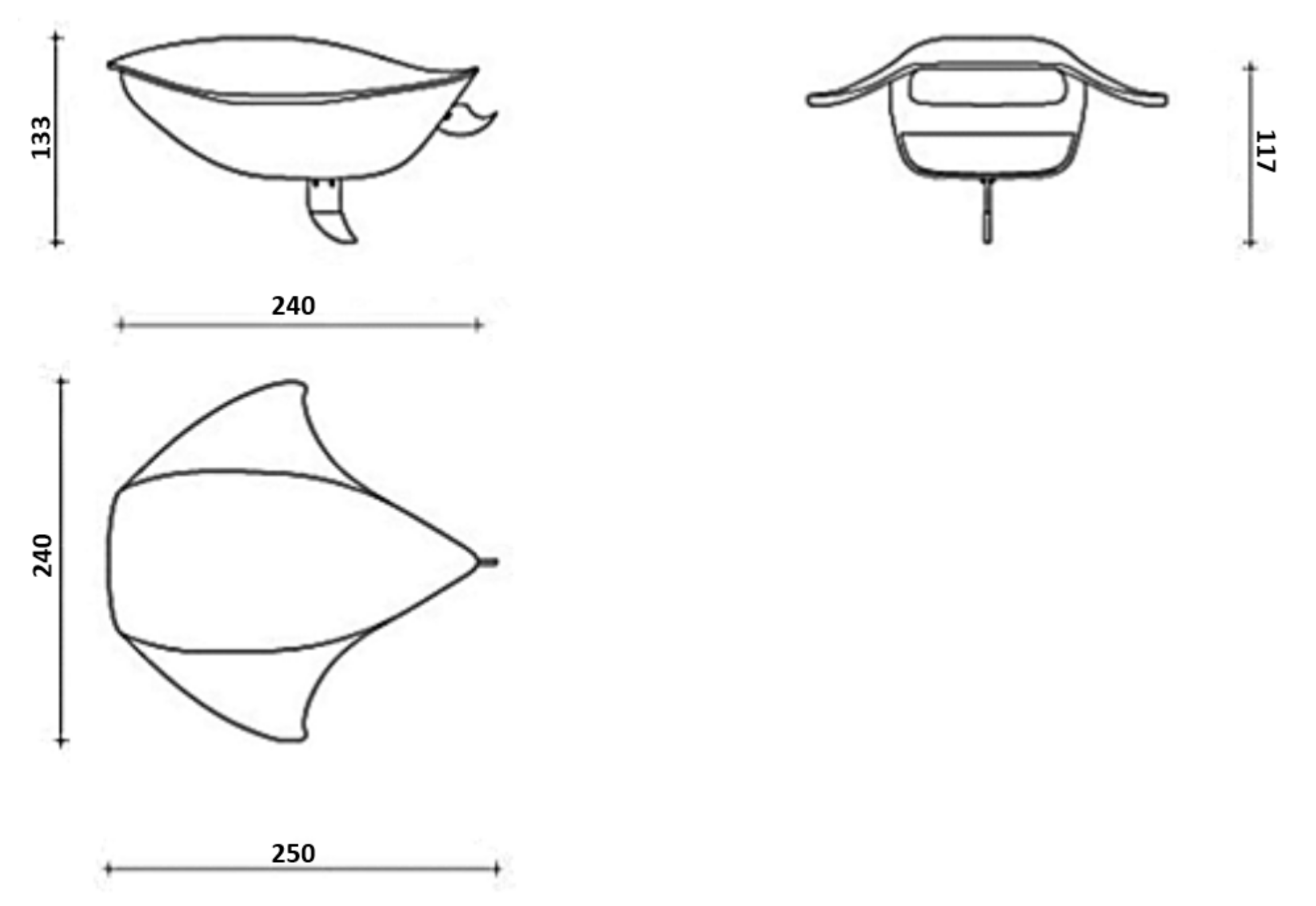
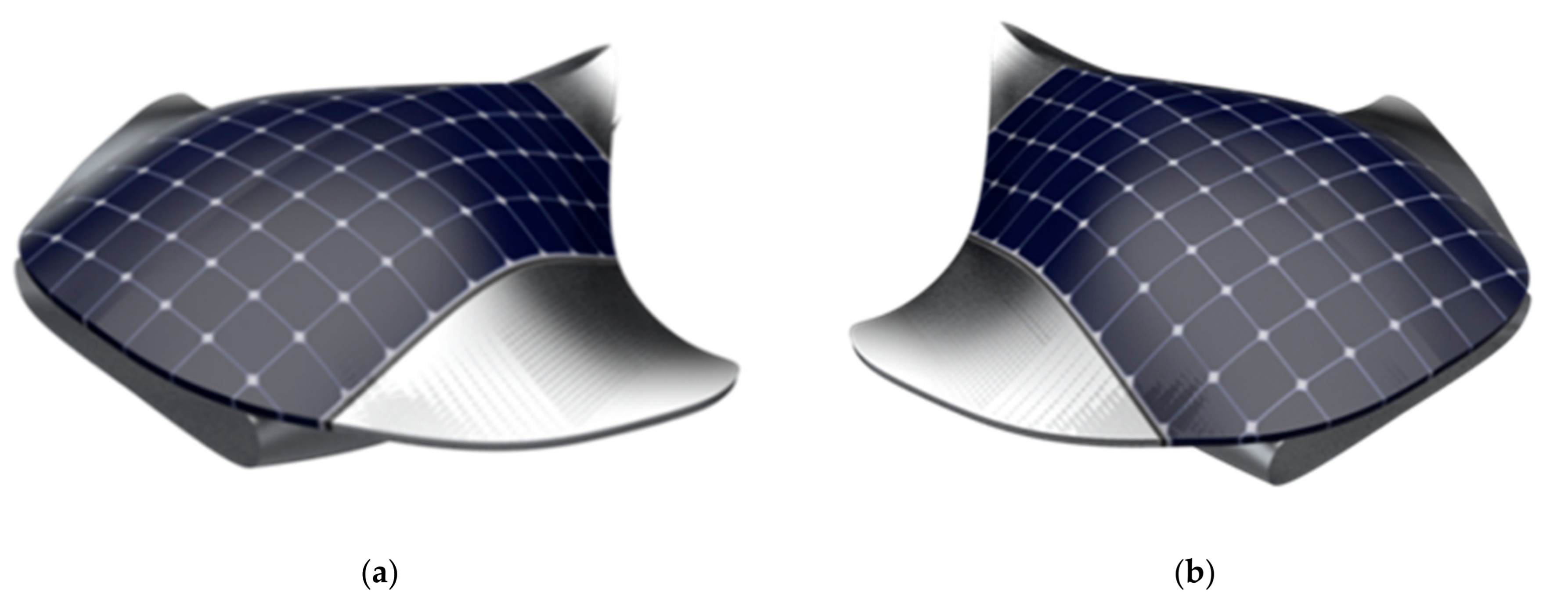
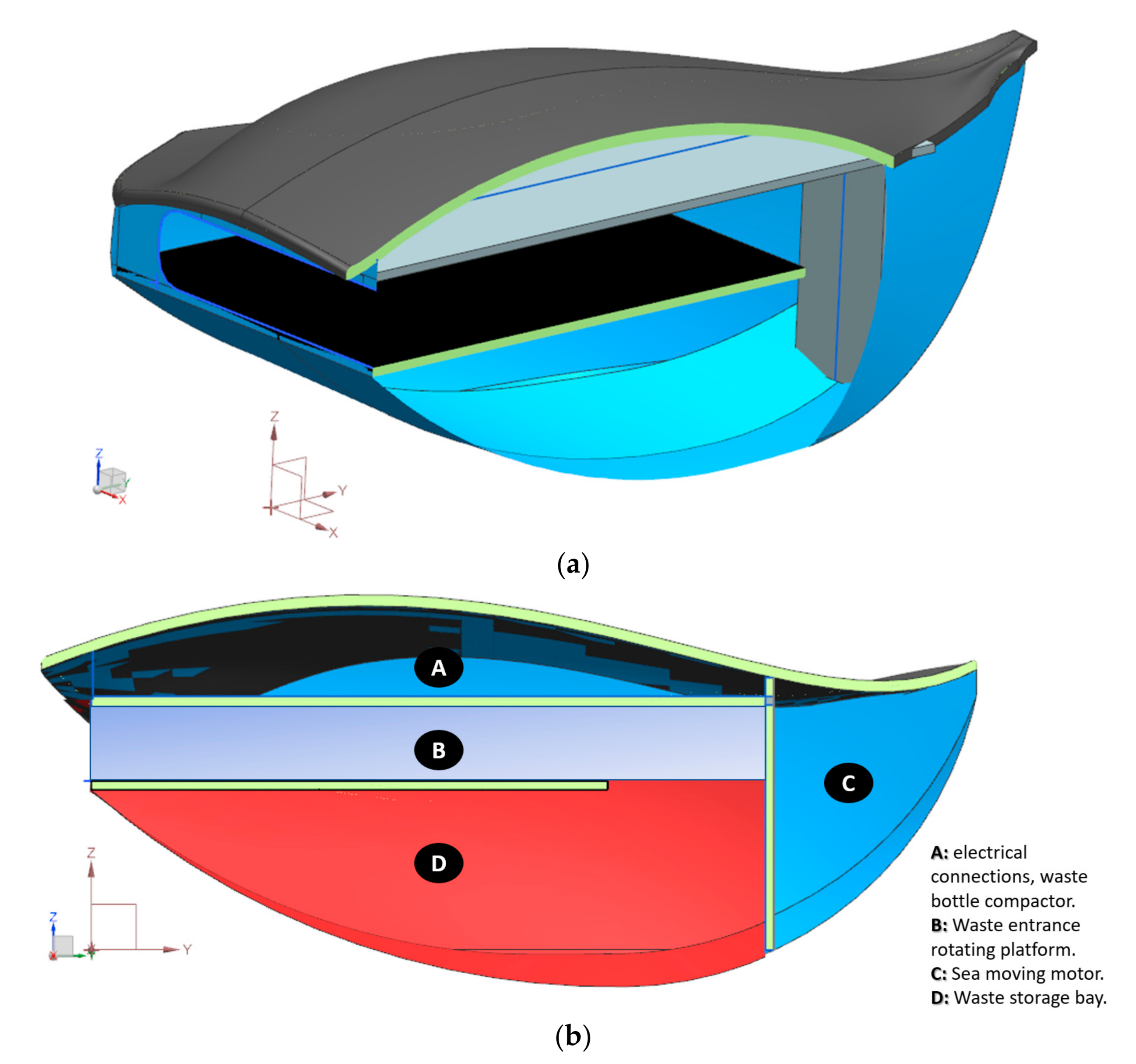
Additionally, environment friendliness was achieved, as the created product is a completely green device capable of collecting marine litter and self-managing it during the entire crop flow. An electric motor powered by both battery and some photovoltaic panels placed in the upper part of the drone was installed. Furthermore, by exploiting the motion of the tides, the drone can reach the waste accumulation areas autonomously and without using the engine. The dimensions of the drone have been selected according to the regulations of the coast guard, remaining within the limits allowed to ensure that it does not need people on board and that its use is controlled. As for the drone’s capacity, it is estimated that it can hold around 6000 L of compacted plastic waste. Even if this data is not among the innovative ones, it can be considered an excellent result given the small size of the drone designed.
Finally, the effectiveness of the IdeS methodology was demonstrated, which provides all the necessary tools for the development of an innovative product.
4. Conclusions
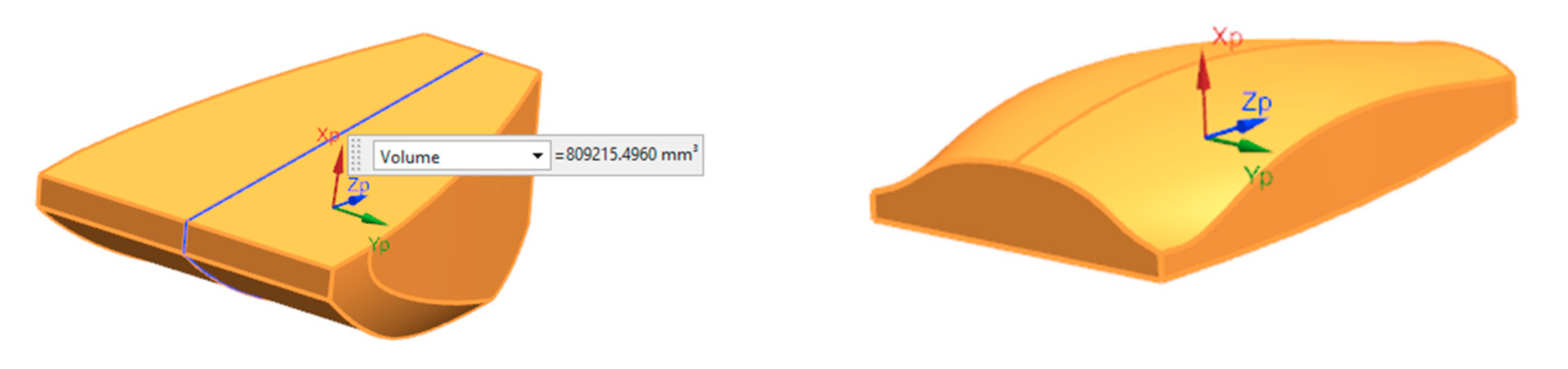
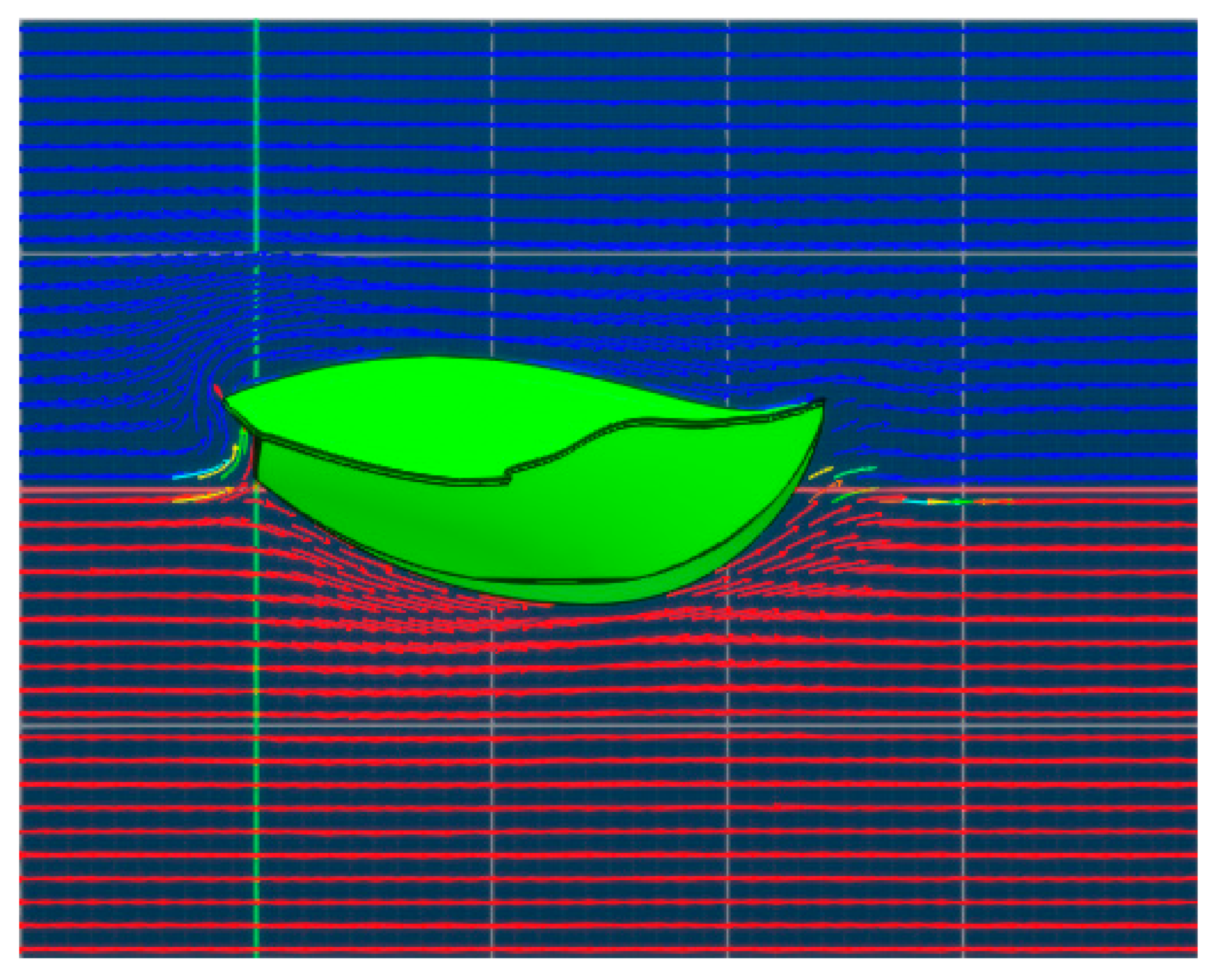
The design of a plastic recovery drone (PRD) was possible with the application of the IdeS methodology. This gave the possibility of integrating tools belonging to the best-known methodologies, such as Generative Design that demonstrated the main advantage of IDeS methodology, to deliver integrated feedback across all departments included in the project development phases of a new product, from the feasibility phase until production setup. Therefore, a complete and effective approach has been obtained that can help the designer to solve rather complex design problems in base of the main product requirements. The effectiveness of the method was demonstrated through the prototyping of the drone, which represented an innovative product on the market in terms of autonomy, recovery and control. The elements of this drone were validated technically by means of CAD, CFD software.
The designed drone has, in fact, a “controlled drift” system that allows it to reach any destination independently by exploiting the motion of the tides. However, it was not possible to obtain a drone that was autonomous in cases of strong currents. The drone was in fact equipped with two outboard motors that have significant advantages such as high silence, high economy and high performance, but which undermine the autonomy of the product. However, it is an auxiliary propulsion system to be used only in short distances.
Additionally, a compactor was chosen for waste recovery, which represents a solution with significant logistical and storage advantages and is energy-efficient thanks to the use of solar panels and, therefore, clean energy.
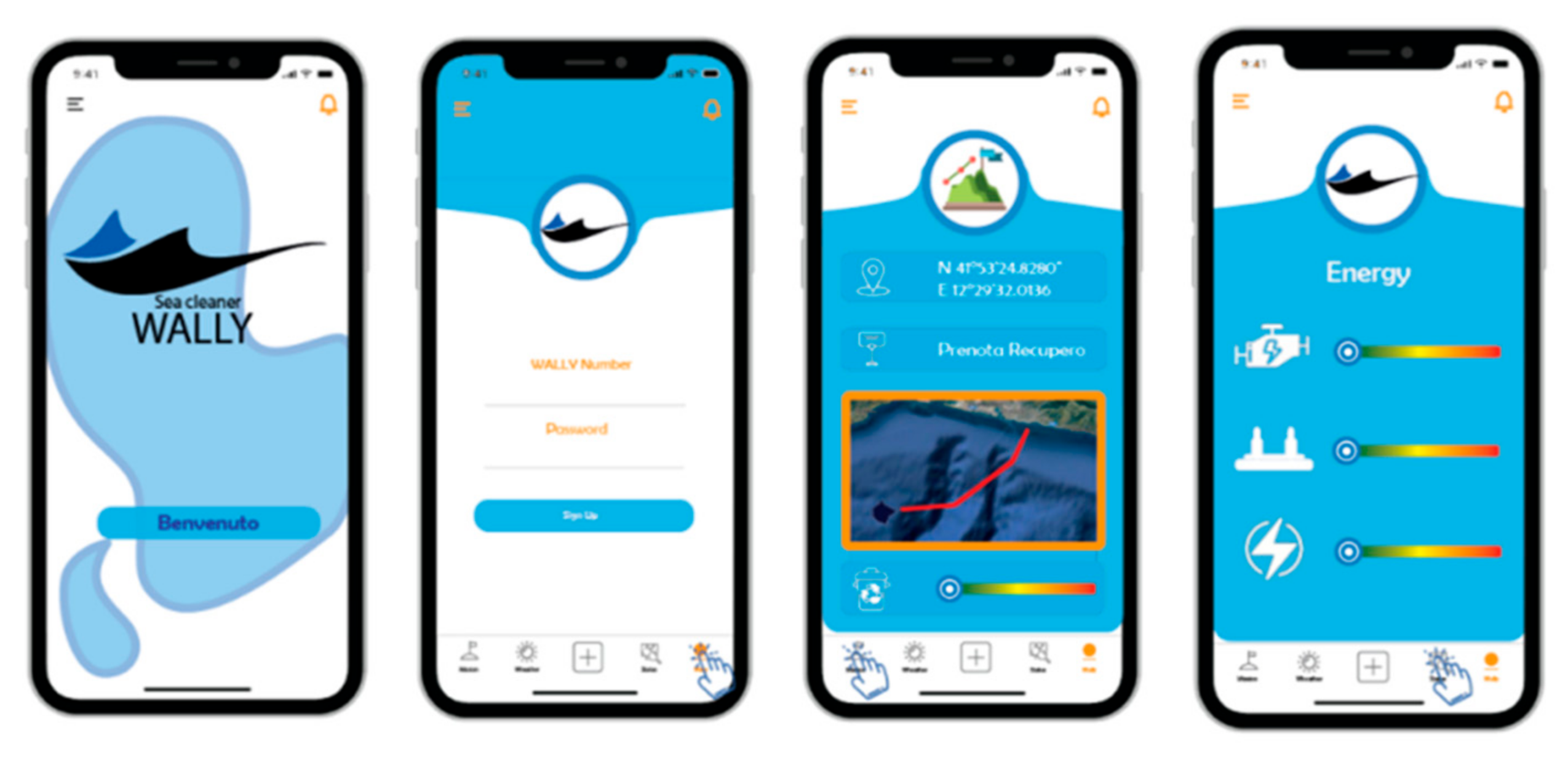
Furthermore, an efficient monitoring system has been devised for the control of the drone, which consists of software that can be installed on all digital devices. This software allows you to know the exact position of the drone at any time, facilitating its recovery in the event of a completed mission or for maintenance.


 ,
, 





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}