A Rolling Electrical Generator Design and Model for Ocean Wave Energy Conversion



Abstract
:
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
1. Introduction
2. Operating Principles
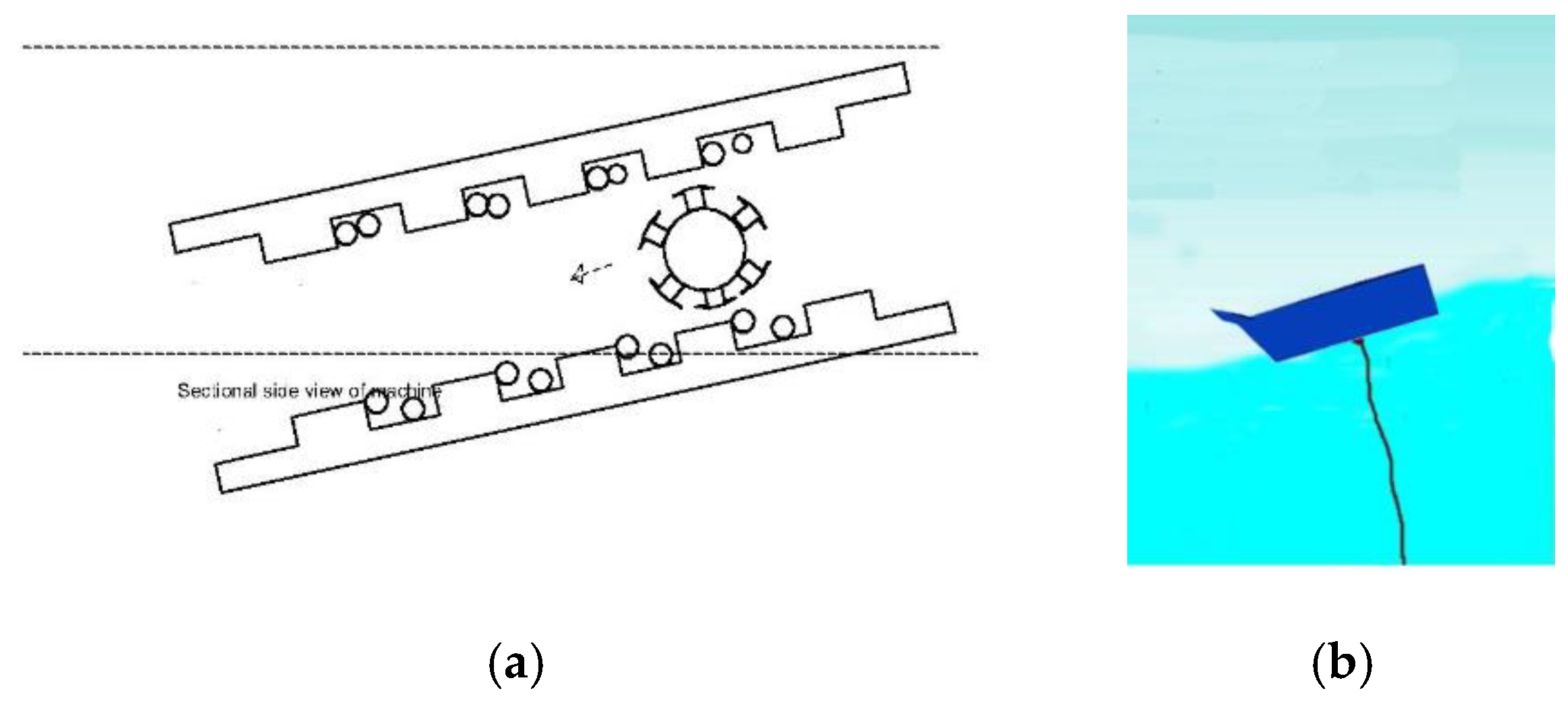
2.1. Working Principle of the Proposed Generator
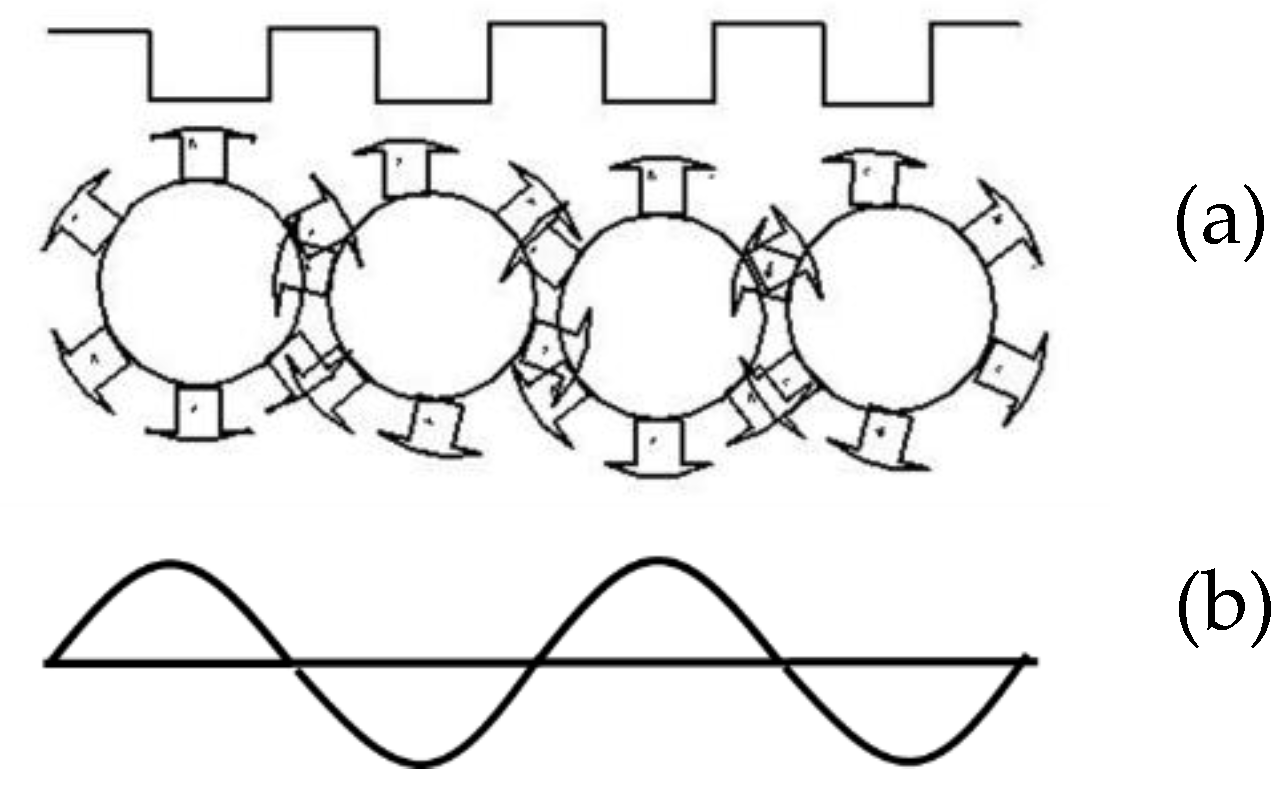
2.2. Generation of EMF
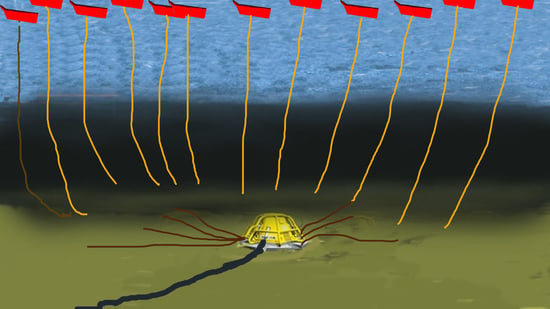
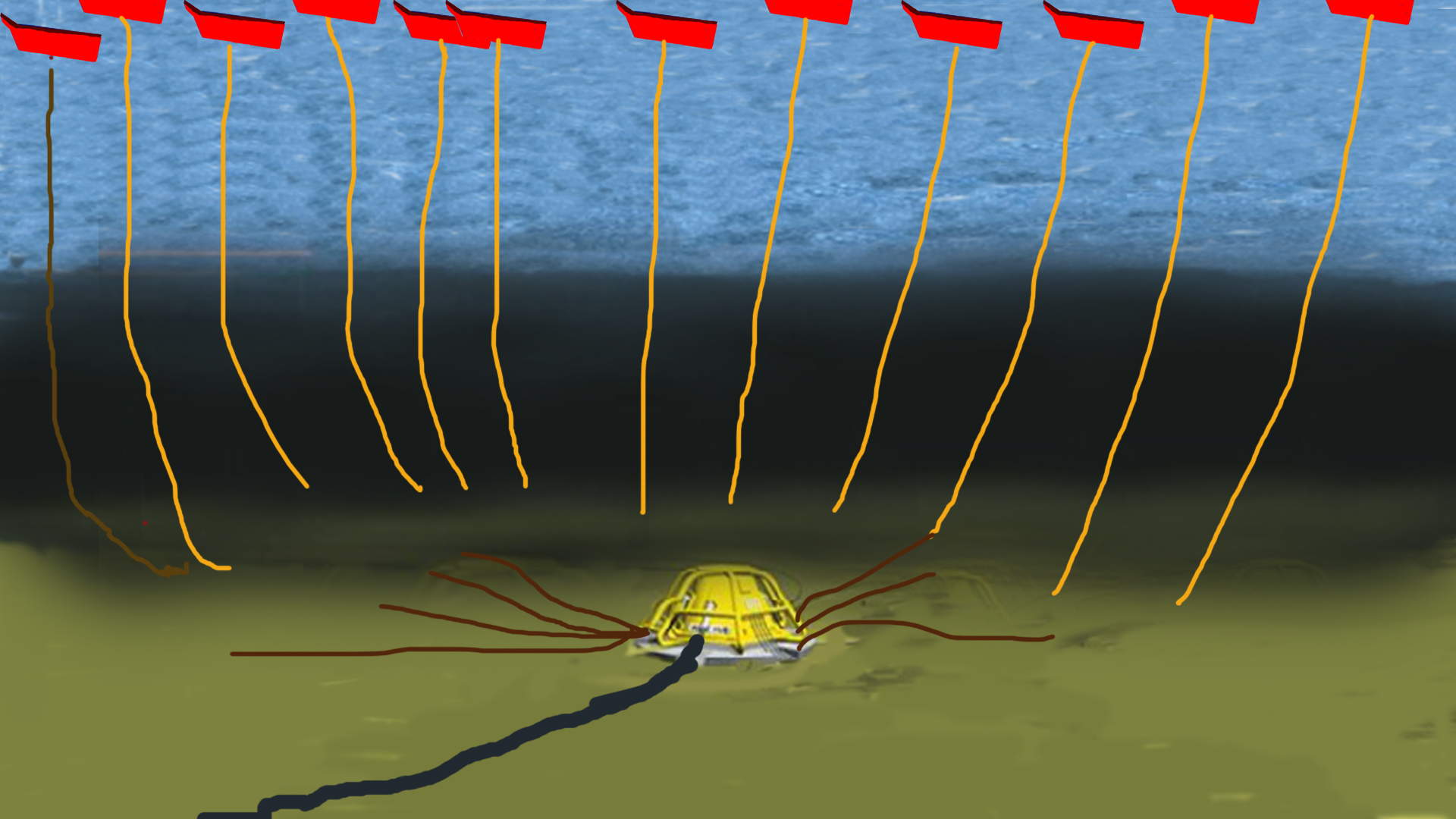
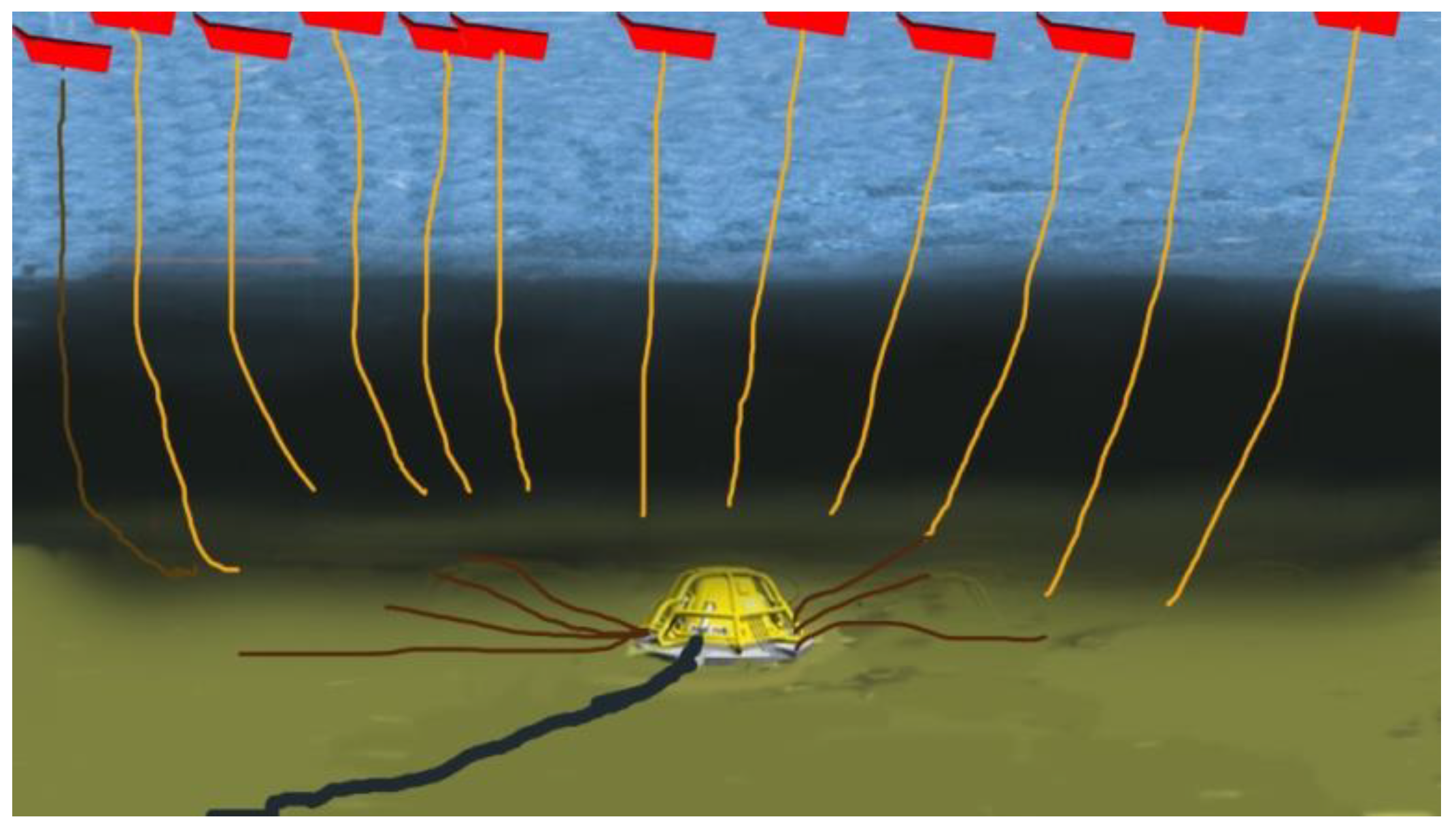
2.3. Plant Overview and Installation
3. System Design
3.1. Materials Required for System Design
3.2. Proposed Design
- (1)
- Design of the stator;
- (2)
- Design of the rotor;
- (3)
- Design of the winding;
- (4)
- Design of the air-sealing hydrophobic body.
3.2.1. Stator Design
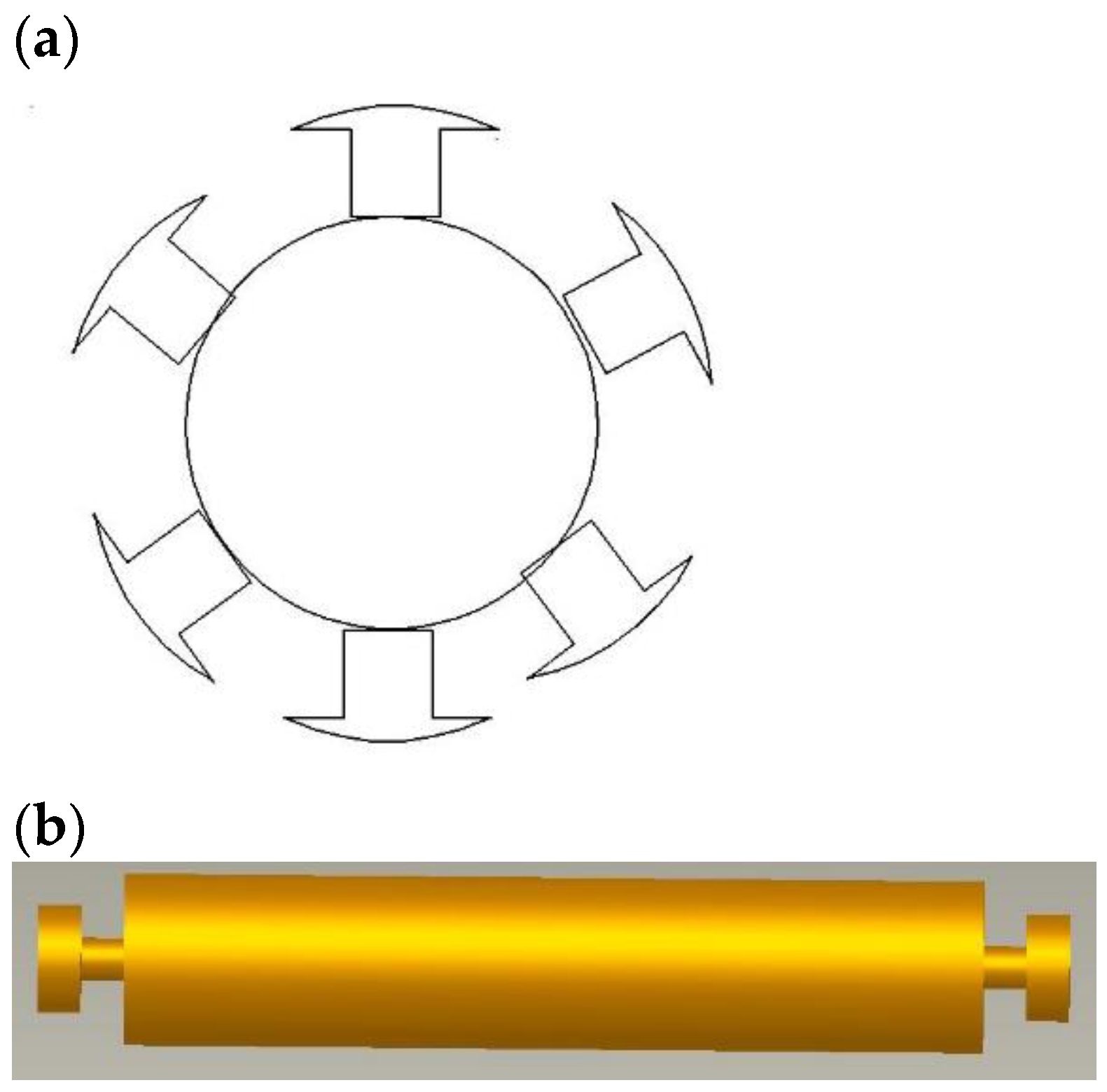
3.2.2. Design of the Rotor
3.2.3. Design of the Winding
3.2.4. Design of the Grooves
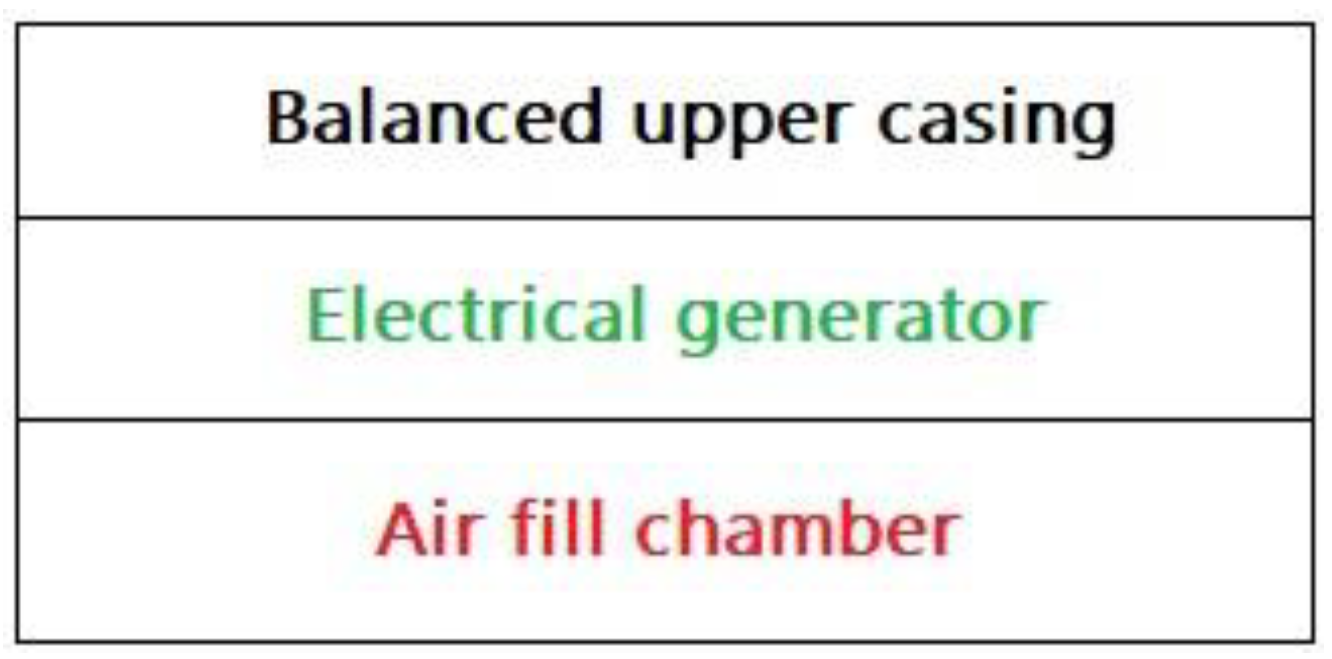
3.2.5. Design of the Hydrophobic Body Seal and Parts Assembly
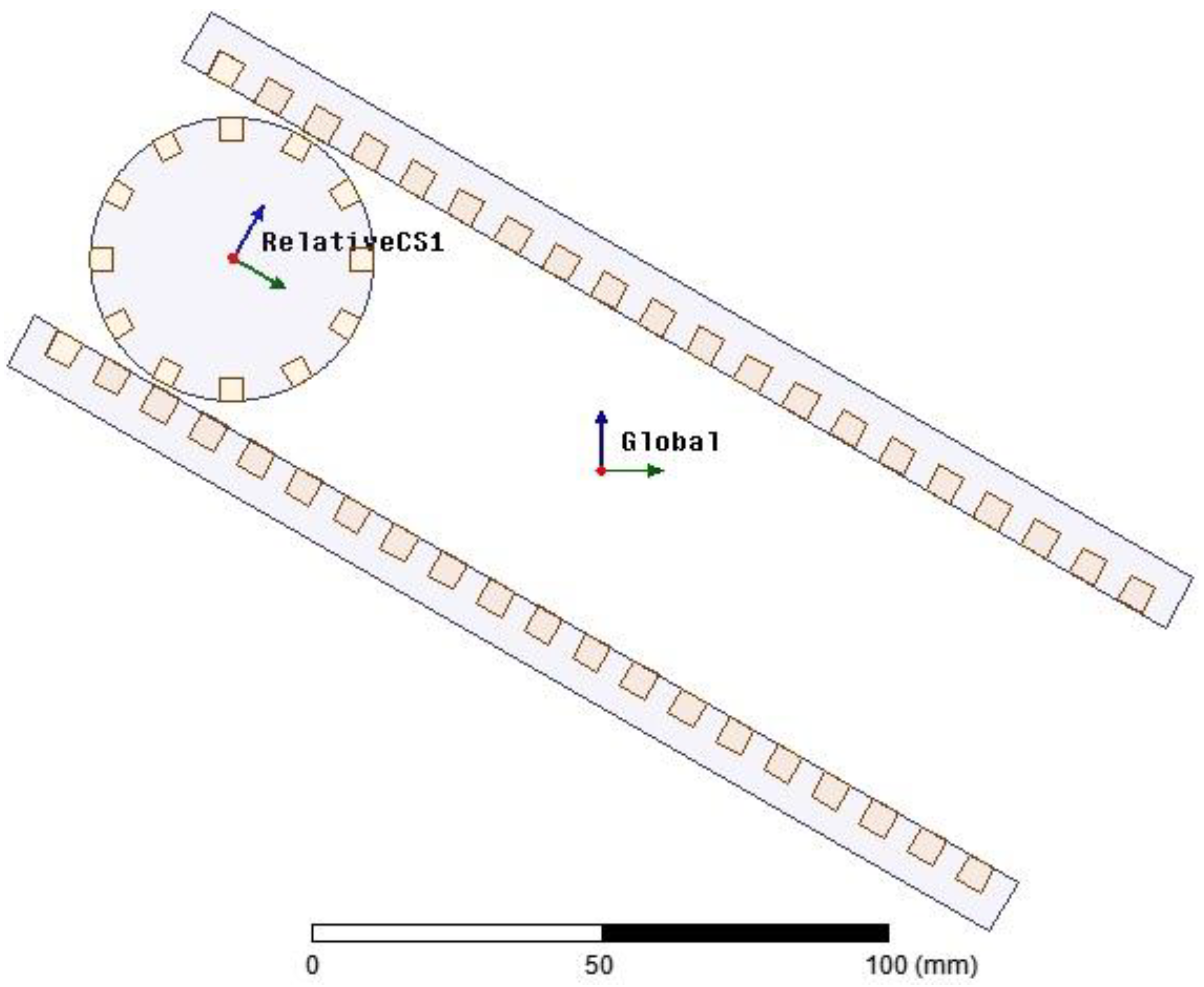
4. Modeling and Simulation
Proof of Concept and Prototype
5. Results and Discussion
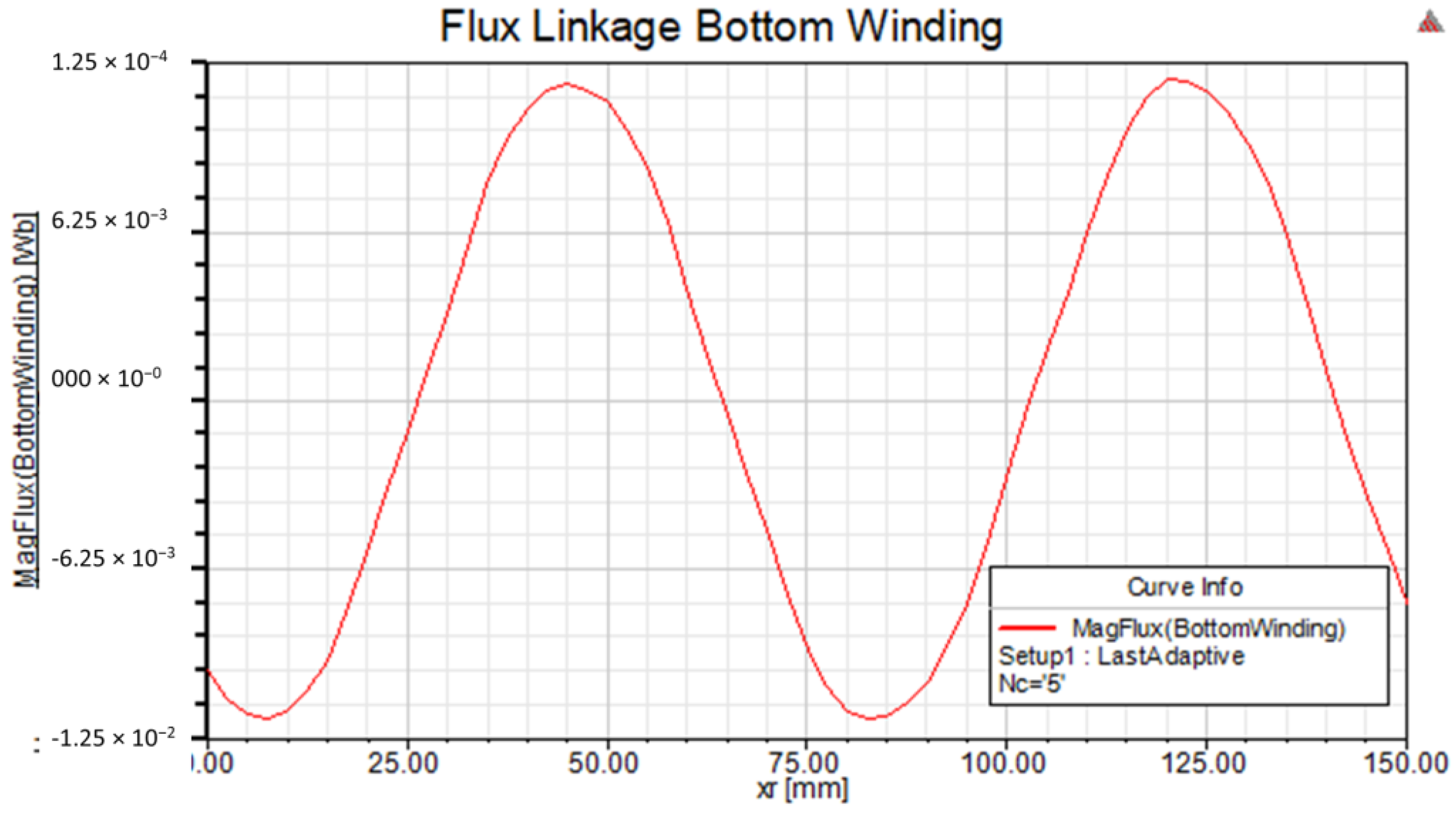
5.1. Simulation Results
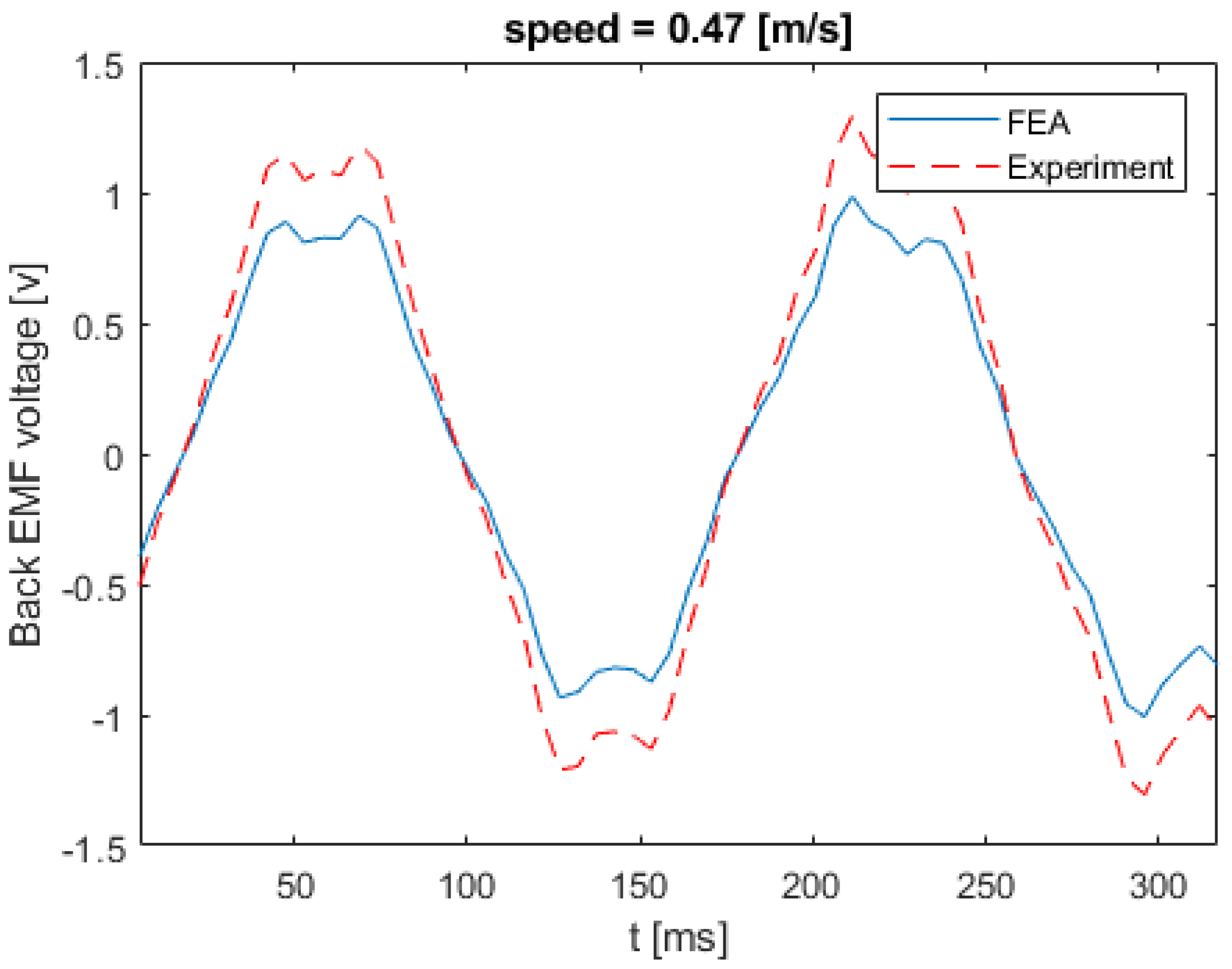
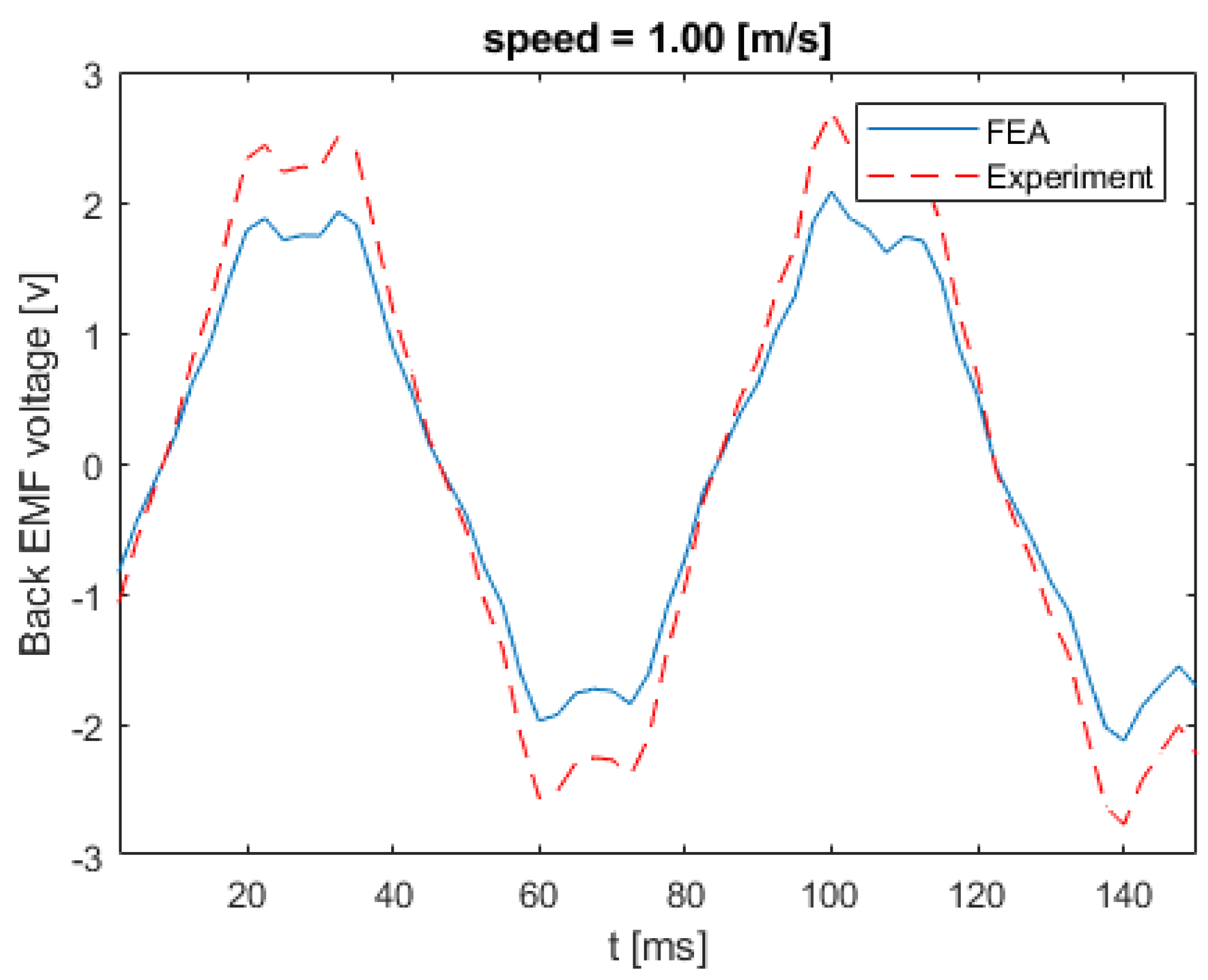
5.2. Prototype Testing Results and Comparison
6. Conclusions
7. Patents
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
Abbreviation
| NOMENCLATURE | |
| Average air gap flux density. | |
| Average time period of wave in seconds | |
| Time taken to rotor from one end to another end in seconds | |
| Length of the stator plate | |
| Total length of wave energy converter | |
| Acceleration due to gravity | |
| Average height of the tide | |
| Wave length | |
| Maximum output voltage | |
| Winding factor | |
| Number of turns | |
| Flux linkage | |
| Flux per pole | |
| Acceleration of rotor | |
| Frequency of generation | |
| Number of slots | |
| Total slot width (tooth width + slot pitch) | |
| Permeability of material | |
| Number of poles | |
| Diameter of the rotor | |
| Radius of rotor | |
References
- Henderson, R. Design, simulation, and testing of a novel hydraulic power take-off system for the Pelamis wave energy converter. Renew. Energy 2006, 31, 271–283. [Google Scholar] [CrossRef]
- Everett, R.; Boyle, G.; Peake, S.; Ramage, J. Energy Systems and Sustainability: Power for a Sustainable Future; Oxford University Press: Oxford, UK, 2012. [Google Scholar]
- Jacobson, P.T.; Hagerman, G.; Scott, G. Mapping and Assessment of the United States Ocean Wave Energy Resource; Electric Power Research Institute: Palo Alto, CA, USA, 2011. [Google Scholar]
- Karayaka, H.B.; Mahlke, H.; Bogucki, D.; Mehrubeoglu, M. A rotational wave energy conversion system development and validation with real ocean wave data. In Proceedings of the 2011 IEEE Power and Energy Society General Meeting, Detroit, MI, USA, 24–28 July 2011; pp. 1–7. [Google Scholar]
- Negri, M.; Malavasi, S. Wave Energy Harnessing in Shallow Water through Oscillating Bodies. Energies 2018, 11, 2730. [Google Scholar] [CrossRef] [Green Version]
- Hazra, S. Power Generation and Energy Storage Integration for Wave Energy Conversion System; North Carolina State University: Raleigh, NC, USA, 2017. [Google Scholar]
- Czech, B.; Bauer, P. Wave energy converter concepts: Design challenges and classification. IEEE Ind. Electron. Mag. 2012, 6, 4–16. [Google Scholar] [CrossRef]
- Drew, B.; Plummer, A.R.; Sahinkaya, M.N. A Review of Wave Energy Converter Technology; Sage Publications Sage UK: London, UK, 2009. [Google Scholar]
- Damacharla, L.V.N.P. A FLOATING WAVE ENERGY CONVERSION SYSTEM. 2011. Available online: http://ipindia.nic.in/ipr/patent/journal_archieve/journal_2011/pat_arch_052011/official_journal_27052011_part_i.pdf (accessed on 26 June 2019).
- Damacharla, P. Design of Linear Rotating Generator for Wave Energy Converter. In Proceedings of the International Conference Renewable and Sustainable Energies 2010 (ICRSE 2010), Hyderabad, AP, India, 18 December 2010; p. 4. [Google Scholar]
- Clément, A.; McCullen, P.; Falcão, A.; Fiorentino, A.; Gardner, F.; Hammarlund, K.; Lemonis, G.; Lewis, T.; Nielsen, K.; Petroncini, S.; et al. Wave energy in Europe: Current status and perspectives. Renew. Sustain. Energy Rev. 2002, 6, 405–431. [Google Scholar]
- Pyrhonen, J.; Jokinen, T.; Hrabovcova, V. Design of Rotating Electrical Machines; John Wiley & Son: Hoboken, NJ, USA, 2013. [Google Scholar]
- Say, M.G. Performance and Design of AC Machines; English CBS Publishers Distributors: New Delhi, India, 1995. [Google Scholar]
- Fang, H.-W.; Song, R.-N.; Xiao, Z.-X. Optimal Design of Permanent Magnet Linear Generator and Its Application in a Wave Energy Conversion System. Energies 2018, 11, 3109. [Google Scholar] [CrossRef] [Green Version]
- Singh, S.K. Rolling Along an Incline. Available online: https://cnx.org/contents/MymQBhVV@175.14:qte40QR6@9/Rolling-along-an-incline (accessed on 11 May 2019).
- Leijon, M.; Danielsson, O.; Eriksson, M.; Thorburn, K.; Bernhoff, H.; Isberg, J.; Sundberg, J.; Ivanova, I.; Sjöstedt, E.; Ågren, O. An electrical approach to wave energy conversion. Renew. Energy 2006, 31, 1309–1319. [Google Scholar] [CrossRef]
- Mei, D. Electrical thrust in opposite direction of aggressive submarine. Mar. Electr. Electron. Technol. 1995, 2, 30–35. [Google Scholar]




















© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Damacharla, P.; Fard, A.J. A Rolling Electrical Generator Design and Model for Ocean Wave Energy Conversion. Inventions 2020, 5, 3. https://doi.org/10.3390/inventions5010003
Damacharla P, Fard AJ. A Rolling Electrical Generator Design and Model for Ocean Wave Energy Conversion. Inventions. 2020; 5(1):3. https://doi.org/10.3390/inventions5010003
Chicago/Turabian StyleDamacharla, Praveen, and Ali Jamali Fard. 2020. "A Rolling Electrical Generator Design and Model for Ocean Wave Energy Conversion" Inventions 5, no. 1: 3. https://doi.org/10.3390/inventions5010003