


An Advanced Bio-Inspired Mantis Search Algorithm for Characterization of PV Panel and Global Optimization of Its Model Parameters
 , ,
, ,  and
and
Abstract
:1. Introduction
1.1. Motivation and Incitement
1.2. Literature Review
1.3. Contribution and Paper Organisation
2. Problem Formulation of Solar PV Parameters Extraction
2.1. PV Equivalent Circuit-Based on 3DM
2.2. PV Equivalent Circuit-Based on 2DM
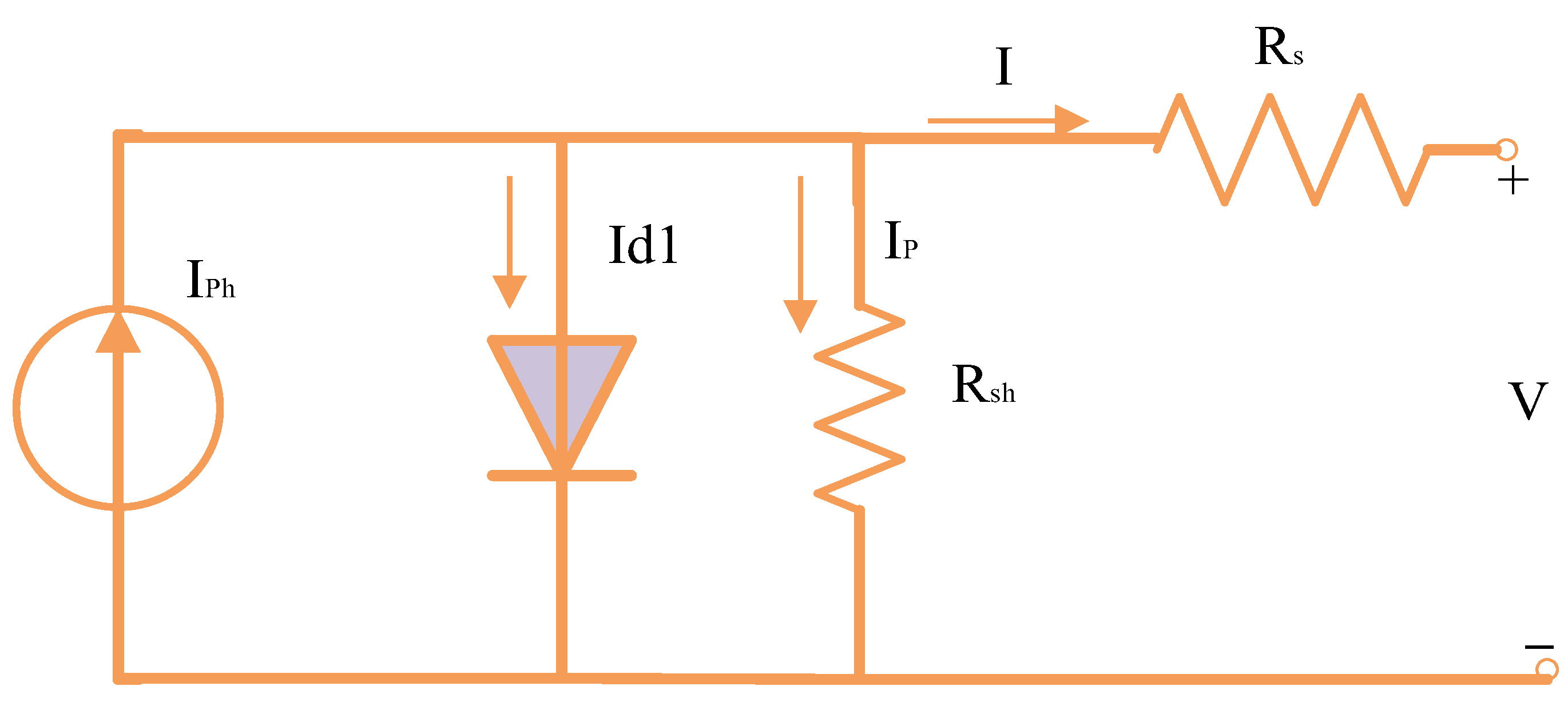
2.3. PV Equivalent Circuit-Based on 1DM
2.4. Objective Model
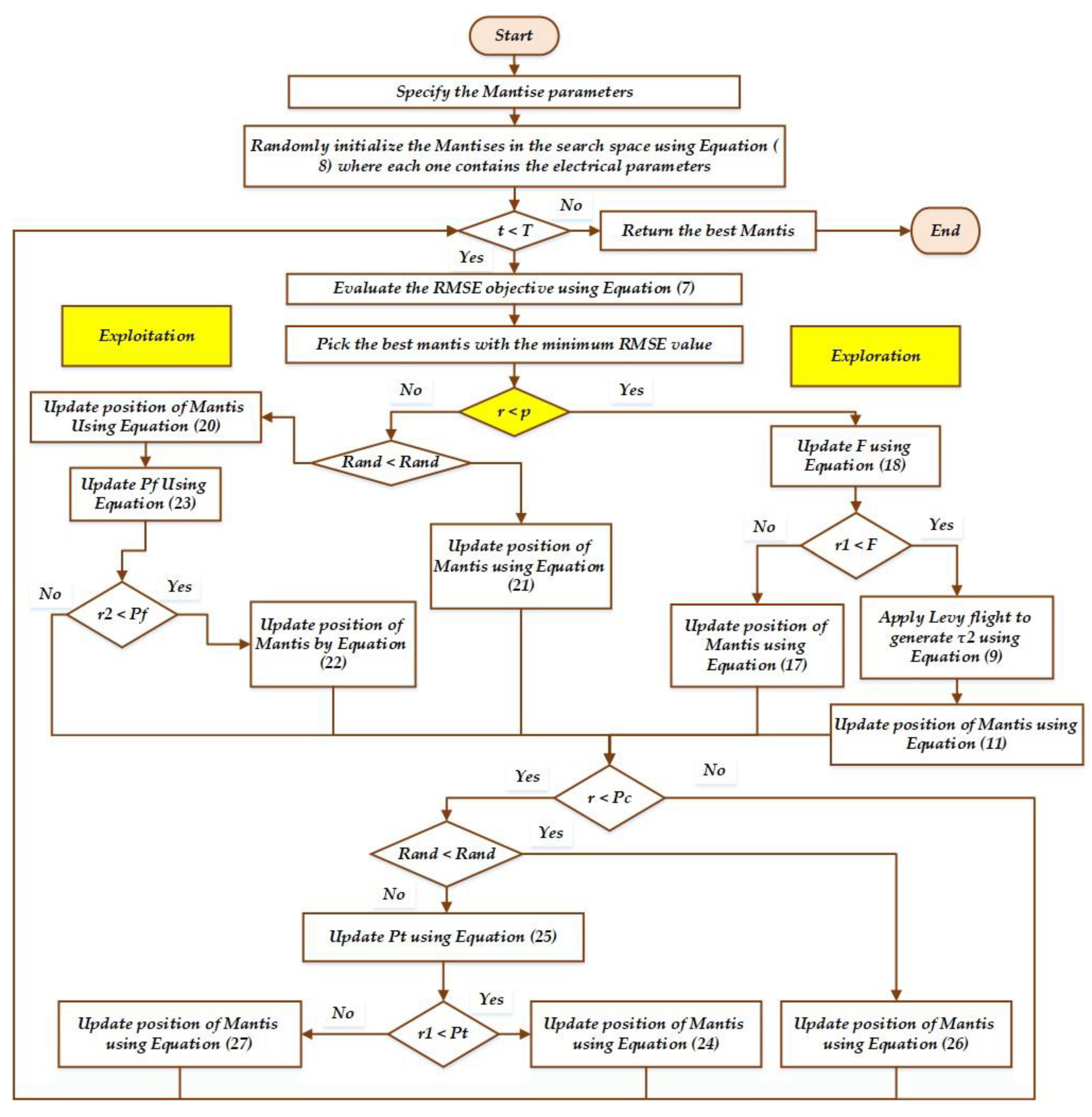
3. Developing MSA for Best Extraction of PV Parameters
3.1. Initial Population
3.2. Exploration Stage
3.3. Attacking the Prey: Exploitation Stage
3.4. Sexual Cannibalism
4. Simulation Results
4.1. First Test Investigation: RTC France Cell
4.1.1. Case 1: Application for 1DM System
4.1.2. Case 2: Application for 2DM System
4.1.3. Case 3: Application for 3DM System
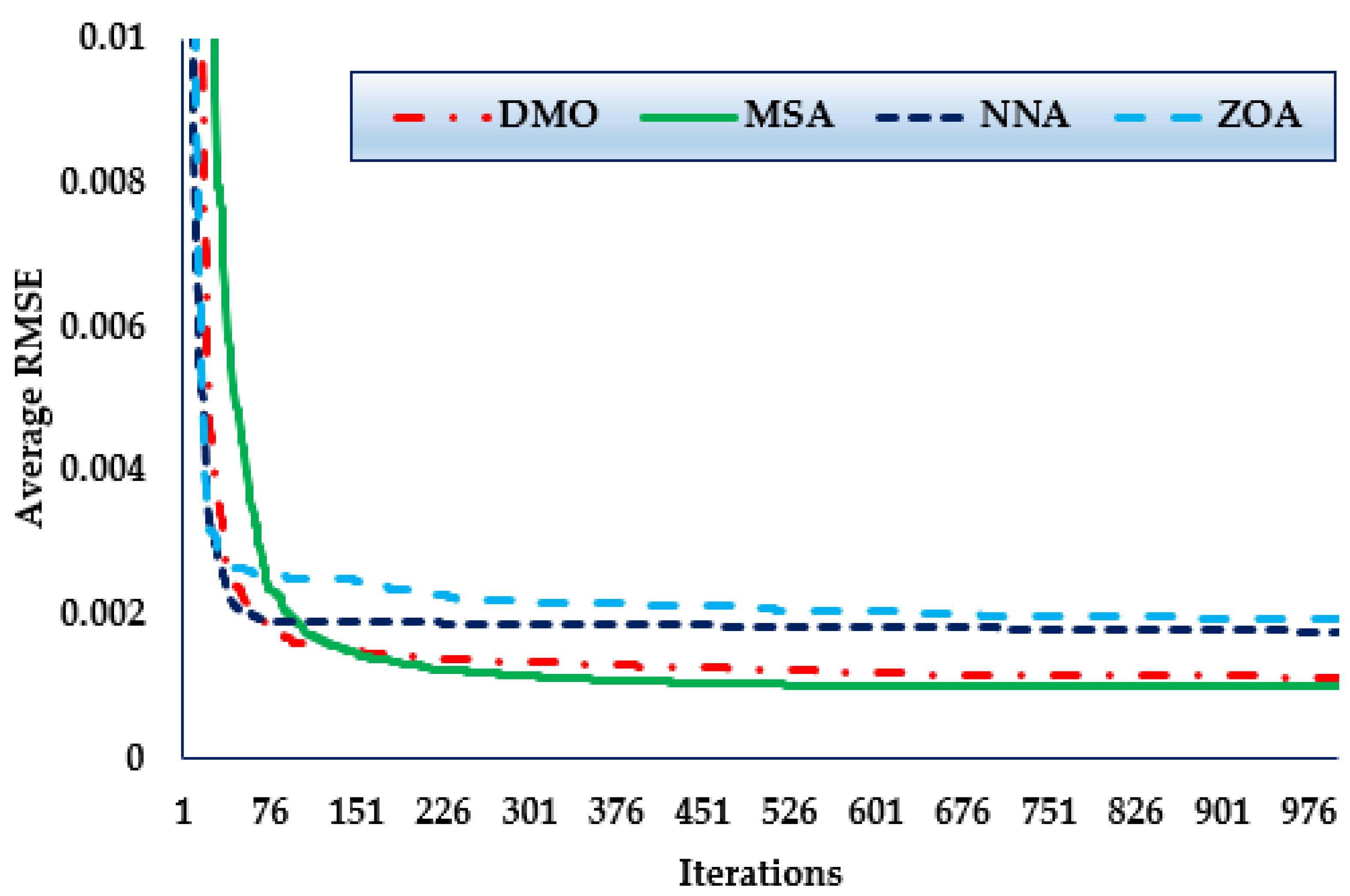
4.1.4. Statistical Assessment of MSA, NNA, DMO, and ZOA for Cases 1–3 (RTC France Cell)
4.2. Second Test Investigation: Ultra 85-P PV Panel
4.2.1. Case 4: Application for 1DM System
4.2.2. Case 5: Application for 2DM System
4.2.3. Case 6: Application for 3DM System
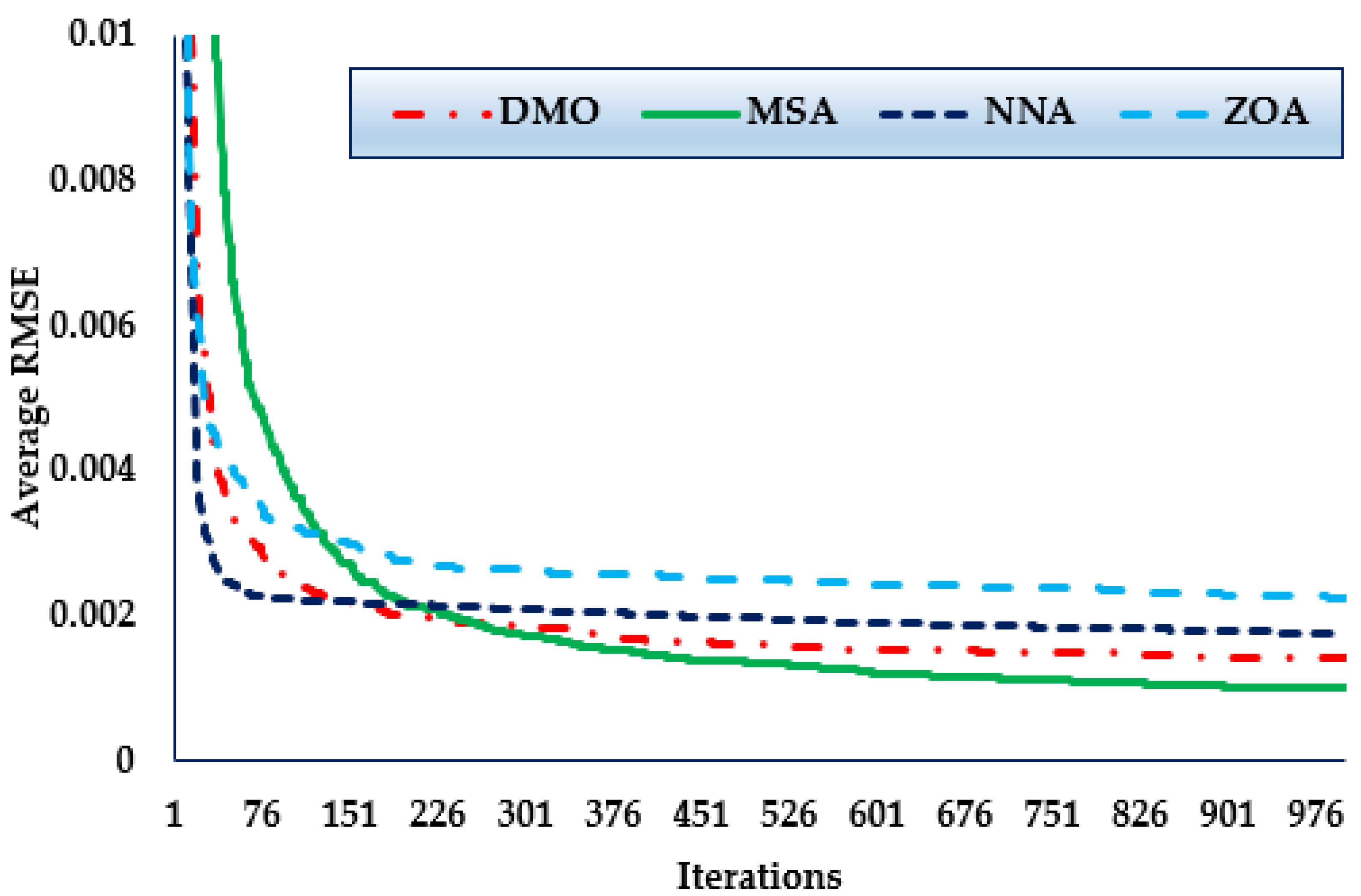
4.2.4. Statistical Assessment of MSA, NNA, DMO, and ZOA for Cases 4–6 (Ultra 85-P PV Panel)
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
Appendix A

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Value | Parameter Description |
|---|---|
| p = 0.5 | A probability to exchange between the exploration and exploitation stages |
| A = 1.0 | Length of the archive |
| a = 0.5 | A probability of the strike’s failure |
| P = 2 | A recycling factor to exchange between pursuers and spearers |
| alp = 6 | The gravitational acceleration rate of the mantis’s strike |
| Pc = 0.2 | The percentage of sexual cannibalism |
References
- Abdel-Basset, M.; El-Shahat, D.; Chakrabortty, R.K.; Ryan, M. Parameter estimation of photovoltaic models using an improved marine predators algorithm. Energy Convers. Manag. 2021, 227, 113491. [Google Scholar] [CrossRef]
- Abbassi, R.; Abbassi, A.; Jemli, M.; Chebbi, S. Identification of unknown parameters of solar cell models: A comprehensive overview of available approaches. Renew. Sustain. Energy Rev. 2018, 90, 453–474. [Google Scholar] [CrossRef]
- Ma, J.; Bi, Z.; Ting, T.O.; Hao, S.; Hao, W. Comparative performance on photovoltaic model parameter identification via bio-inspired algorithms. Sol. Energy 2016, 132, 606–616. [Google Scholar] [CrossRef]
- Muci, J.; Ortiz-Conde, A.O.; Garcı, F.J. New method to extract the model parameters of solar cells from the explicit analytic solutions of their illuminated I–V characteristics. Sol. Energy Mater. Sol. Cells 2006, 90, 352–361. [Google Scholar] [CrossRef]
- Easwarakhanthan, T.; Bottin, J.; Bouhouch, I.; Boutrit, C. Nonlinear Minimization Algorithm for Determining the Solar Cell Parameters with Microcomputers. Int. J. Sol. Energy 1986, 4, 1–12. [Google Scholar] [CrossRef]
- Siddiqui, M.U.; Abido, M. Parameter estimation for five- and seven-parameter photovoltaic electrical models using evolutionary algorithms. Appl. Soft Comput. 2013, 13, 4608–4621. [Google Scholar] [CrossRef]
- Gao, X.; Cui, Y.; Hu, J.; Xu, G.; Wang, Z.; Qu, J.; Wang, H. Parameter extraction of solar cell models using improved shuffled complex evolution algorithm. Energy Convers. Manag. 2018, 157, 460–479. [Google Scholar] [CrossRef]
- Sudhakar Babu, T.; Prasanth Ram, J.; Sangeetha, K.; Laudani, A.; Rajasekar, N. Parameter extraction of two diode solar PV model using Fireworks algorithm. Sol. Energy 2016, 140, 44. [Google Scholar] [CrossRef]
- Kanimozhi, G. Harish Kumar Modeling of solar cell under different conditions by Ant Lion Optimizer with LambertW function. Appl. Soft Comput. J. 2018, 71, 141–151. [Google Scholar] [CrossRef]
- Oliva, D.; Cuevas, E.; Pajares, G. Parameter identification of solar cells using artificial bee colony optimization. Energy 2014, 72, 93–102. [Google Scholar] [CrossRef]
- Xu, S.; Wang, Y. Parameter estimation of photovoltaic modules using a hybrid flower pollination algorithm. Energy Convers. Manag. 2017, 144, 53–68. [Google Scholar] [CrossRef]
- Oliva, D.; Abd El Aziz, M.; Ella Hassanien, A. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Appl. Energy 2017, 200, 29. [Google Scholar] [CrossRef]
- Yu, K.; Qu, B.; Yue, C.; Ge, S.; Chen, X.; Liang, J. A performance-guided JAYA algorithm for parameters identification of photovoltaic cell and module. Appl. Energy 2019, 237, 241–257. [Google Scholar] [CrossRef]
- Liu, Y.; Chong, G.; Heidari, A.A.; Chen, H.; Liang, G.; Ye, X.; Cai, Z.; Wang, M. Horizontal and vertical crossover of Harris hawk optimizer with Nelder-Mead simplex for parameter estimation of photovoltaic models. Energy Convers. Manag. 2020, 223, 113211. [Google Scholar] [CrossRef]
- Zhang, H.; Heidari, A.A.; Wang, M.; Zhang, L.; Chen, H.; Li, C. Orthogonal Nelder-Mead moth flame method for parameters identification of photovoltaic modules. Energy Convers. Manag. 2020, 211, 112764. [Google Scholar] [CrossRef]
- Ridha, H.M.; Heidari, A.A.; Wang, M.; Chen, H. Boosted mutation-based Harris hawks optimizer for parameters identification of single-diode solar cell models. Energy Convers. Manag. 2020, 209, 112660. [Google Scholar] [CrossRef]
- Chen, H.; Jiao, S.; Wang, M.; Heidari, A.A.; Zhao, X. Parameters identification of photovoltaic cells and modules using diversification-enriched Harris hawks optimization with chaotic drifts. J. Clean. Prod. 2020, 244, 118778. [Google Scholar] [CrossRef]
- Wu, Z.; Yu, D.; Kang, X. Parameter identification of photovoltaic cell model based on improved ant lion optimizer. Energy Convers. Manag. 2017, 151, 107–115. [Google Scholar] [CrossRef]
- Chen, H.; Jiao, S.; Heidari, A.A.; Wang, M.; Chen, X.; Zhao, X. An opposition-based sine cosine approach with local search for parameter estimation of photovoltaic models. Energy Convers. Manag. 2019, 195, 927–942. [Google Scholar] [CrossRef]
- Merchaoui, M.; Sakly, A.; Mimouni, M.F. Particle swarm optimisation with adaptive mutation strategy for photovoltaic solar cell/module parameter extraction. Energy Convers. Manag. 2018, 175, 151–163. [Google Scholar] [CrossRef]
- Nunes, H.G.G.; Pombo, J.A.N.; Mariano, S.J.P.S.; Calado, M.R.A.; Felippe de Souza, J.A.M. A new high performance method for determining the parameters of PV cells and modules based on guaranteed convergence particle swarm optimization. Appl. Energy 2018, 211, 774–791. [Google Scholar] [CrossRef]
- Ridha, H.M.; Gomes, C.; Hizam, H.; Ahmadipour, M.; Heidari, A.A.; Chen, H. Multi-objective optimization and multi-criteria decision-making methods for optimal design of standalone photovoltaic system: A comprehensive review. Renew. Sustain. Energy Rev. 2021, 135, 110202. [Google Scholar] [CrossRef]
- Jiao, S.; Chong, G.; Huang, C.; Hu, H.; Wang, M.; Heidari, A.A.; Chen, H.; Zhao, X. Orthogonally adapted Harris hawks optimization for parameter estimation of photovoltaic models. Energy 2020, 203, 117804. [Google Scholar] [CrossRef]
- Abbassi, A.; Abbassi, R.; Heidari, A.A.; Oliva, D.; Chen, H.; Habib, A.; Jemli, M.; Wang, M. Parameters identification of photovoltaic cell models using enhanced exploratory salp chains-based approach. Energy 2020, 198, 117333. [Google Scholar] [CrossRef]
- Ayyarao, T.S.L.V.; Kishore, G.I. Parameter estimation of solar PV models with artificial humming bird optimization algorithm using various objective functions. Soft Comput. 2023, 1–22. [Google Scholar] [CrossRef]
- Trojovský, P.; Dehghani, M. Subtraction-Average-Based Optimizer: A New Swarm-Inspired Metaheuristic Algorithm for Solving Optimization Problems. Biomimetics 2023, 8, 149. [Google Scholar] [CrossRef]
- Jakšić, Z.; Devi, S.; Jakšić, O.; Guha, K. A Comprehensive Review of Bio-Inspired Optimization Algorithms Including Applications in Microelectronics and Nanophotonics. Biomimetics 2023, 8, 278. [Google Scholar] [CrossRef]
- Trojovská, E.; Dehghani, M.; Leiva, V. Drawer Algorithm: A New Metaheuristic Approach for Solving Optimization Problems in Engineering. Biomimetics 2023, 8, 239. [Google Scholar] [CrossRef]
- Moustafa, G.; Tolba, M.A.; El-Rifaie, A.M.; Ginidi, A.; Shaheen, A.M.; Abid, S. A Subtraction-Average-Based Optimizer for Solving Engineering Problems with Applications on TCSC Allocation in Power Systems. Biomimetics 2023, 8, 332. [Google Scholar] [CrossRef]
- Madhiarasan, M.; Cotfas, D.T.; Cotfas, P.A. Black Widow Optimization Algorithm Used to Extract the Parameters of Photovoltaic Cells and Panels. Mathematics 2023, 11, 967. [Google Scholar] [CrossRef]
- Zhu, J.; Liu, J.; Chen, Y.; Xue, X.; Sun, S. Binary Restructuring Particle Swarm Optimization and Its Application. Biomimetics 2023, 8, 266. [Google Scholar] [CrossRef] [PubMed]
- Hashim, F.A.; Houssein, E.H.; Mabrouk, M.S.; Al-Atabany, W.; Mirjalili, S. Henry gas solubility optimization: A novel physics-based algorithm. Futur. Gener. Comput. Syst. 2019, 101, 646–667. [Google Scholar] [CrossRef]
- Moustafa, G.; El-Rifaie, A.M.; Smaili, I.H.; Ginidi, A.; Shaheen, A.M.; Youssef, A.F.; Tolba, M.A. An Enhanced Dwarf Mongoose Optimization Algorithm for Solving Engineering Problems. Mathematics 2023, 11, 3297. [Google Scholar] [CrossRef]
- Abdel-Basset, M.; Mohamed, R.; Zidan, M.; Jameel, M.; Abouhawwash, M. Mantis Search Algorithm: A novel bio-inspired algorithm for global optimization and engineering design problems. Comput. Methods Appl. Mech. Eng. 2023, 415, 116200. [Google Scholar] [CrossRef]
- Sadollah, A.; Sayyaadi, H.; Yadav, A. A dynamic metaheuristic optimization model inspired by biological nervous systems: Neural network algorithm. Appl. Soft Comput. J. 2018, 71, 39. [Google Scholar] [CrossRef]
- Agushaka, J.O.; Ezugwu, A.E.; Abualigah, L. Dwarf Mongoose Optimization Algorithm. Comput. Methods Appl. Mech. Eng. 2022, 391, 114570. [Google Scholar] [CrossRef]
- Trojovska, E.; Dehghani, M.; Trojovsky, P. Zebra Optimization Algorithm: A New Bio-Inspired Optimization Algorithm for Solving Optimization Algorithm. IEEE Access 2022, 10, 3172789. [Google Scholar] [CrossRef]
- Shaheen, A.M.; El-Sehiemy, R.A.; Ginidi, A.; Elsayed, A.M.; Al-Gahtani, S.F. Optimal Allocation of PV-STATCOM Devices in Distribution Systems for Energy Losses Minimization and Voltage Profile Improvement via Hunter-Prey-Based Algorithm. Energies 2023, 16, 2790. [Google Scholar] [CrossRef]
- Shaheen, A.M.; Ginidi, A.R.; El-Sehiemy, R.A.; El-Fergany, A.; Elsayed, A.M. Optimal parameters extraction of photovoltaic triple diode model using an enhanced artificial gorilla troops optimizer. Energy 2023, 283, 129034. [Google Scholar] [CrossRef]
- Chin, V.J.; Salam, Z.; Ishaque, K. Cell modelling and model parameters estimation techniques for photovoltaic simulator application: A review. Appl. Energy 2015, 154, 500–519. [Google Scholar] [CrossRef]
- Ginidi, A.R.; Shaheen, A.M.; El-Sehiemy, R.A.; Hasanien, H.M.; Al-Durra, A. Estimation of electrical parameters of photovoltaic panels using heap-based algorithm. IET Renew. Power Gener. 2022, 16, 2292–2312. [Google Scholar] [CrossRef]
- Ben Aribia, H.; El-Rifaie, A.M.; Tolba, M.A.; Shaheen, A.; Moustafa, G.; Elsayed, F.; Elshahed, M. Growth Optimizer for Parameter Identification of Solar Photovoltaic Cells and Modules. Sustainability 2023, 15, 7896. [Google Scholar] [CrossRef]
- Elshahed, M.; El-Rifaie, A.M.; Tolba, M.A.; Ginidi, A.; Shaheen, A.; Mohamed, S.A. An Innovative Hunter-Prey-Based Optimization for Electrically Based Single-, Double-, and Triple-Diode Models of Solar Photovoltaic Systems. Mathematics 2022, 10, 4625. [Google Scholar] [CrossRef]
- Chin, V.J.; Salam, Z. Coyote optimization algorithm for the parameter extraction of photovoltaic cells. Sol. Energy 2019, 194, 656–670. [Google Scholar] [CrossRef]
- Shell PowerMax Solar Modules for Off-Grids Markets, Shell Solar, The Hague. 2019. Available online: http://www.effectivesolar.com/PDF/shell/SQ-80-85-P.pdf (accessed on 30 January 2020).
- Mehmood, K.; Chaudhary, N.I.; Khan, Z.A.; Cheema, K.M.; Raja, M.A.Z.; Milyani, A.H.; Azhari, A.A. Dwarf Mongoose Optimization Metaheuristics for Autoregressive Exogenous Model Identification. Mathematics 2022, 10, 3821. [Google Scholar] [CrossRef]
- Alissa, K.; Elkamchouchi, H.D.; Tarmissi, K.; Yafoz, A.; Alsini, R.; Alghushairy, O.; Mohamed, A.; Al Duhayyim, M. Dwarf Mongoose Optimization with Machine-Learning-Driven Ransomware Detection in Internet of Things Environment. Appl. Sci. 2022, 12, 9513. [Google Scholar] [CrossRef]
- Rana, A.; Khurana, V.; Shrivastava, A.; Gangodkar, D.; Arora, D.; Kumar Dixit, A. A ZEBRA Optimization Algorithm Search for Improving Localization in Wireless Sensor Network. In Proceedings of the International Conference on Technological Advancements in Computational Sciences, ICTACS 2022, Tashkent, Uzbekistan, 10 October 2022. [Google Scholar]
- Saadaoui, D.; Elyaqouti, M.; Assalaou, K.; Ben hmamou, D.; Lidaighbi, S. Parameters optimization of solar PV cell/module using genetic algorithm based on non-uniform mutation. Energy Convers. Manag. X 2021, 12, 100129. [Google Scholar] [CrossRef]
- Niu, Q.; Zhang, L.; Li, K. A biogeography-based optimization algorithm with mutation strategies for model parameter estimation of solar and fuel cells. Energy Convers. Manag. 2014, 86, 1173–1185. [Google Scholar] [CrossRef]
- Wang, W.; Wu, J.M.; Liu, J.H. A particle swarm optimization based on chaotic neighborhood search to avoid premature convergence. In Proceedings of the 2009 Third International Conference on Genetic and Evolutionary Computing, Guilin, China, 14–17 October 2009; pp. 633–636. [Google Scholar] [CrossRef]
- Wang, R.; Zhan, Y.; Zhou, H. Application of artificial bee colony in model parameter identification of solar cells. Energies 2015, 8, 7563–7581. [Google Scholar] [CrossRef]
- Askarzadeh, A.; Rezazadeh, A. Parameter identification for solar cell models using harmony search-based algorithms. Sol. Energy 2012, 86, 3241–3249. [Google Scholar] [CrossRef]
- Long, W.; Cai, S.; Jiao, J.; Xu, M.; Wu, T. A new hybrid algorithm based on grey wolf optimizer and cuckoo search for parameter extraction of solar photovoltaic models. Energy Convers. Manag. 2020, 203, 112243. [Google Scholar] [CrossRef]
- Yu, K.; Liang, J.J.; Qu, B.Y.; Chen, X.; Wang, H. Parameters identification of photovoltaic models using an improved JAYA optimization algorithm. Energy Convers. Manag. 2017, 150, 742–753. [Google Scholar] [CrossRef]
- Hu, Z.; Gong, W.; Li, S. Reinforcement learning-based differential evolution for parameters extraction of photovoltaic models. Energy Rep. 2021, 7, 916–928. [Google Scholar] [CrossRef]
- Chen, X.; Xu, B.; Mei, C.; Ding, Y.; Li, K. Teaching–learning–based artificial bee colony for solar photovoltaic parameter estimation. Appl. Energy 2018, 212, 1578–1588. [Google Scholar] [CrossRef]
- Chen, X.; Yu, K.; Du, W.; Zhao, W.; Liu, G. Parameters identification of solar cell models using generalized oppositional teaching learning based optimization. Energy 2016, 99, 170–180. [Google Scholar] [CrossRef]
- Rao, R.V.; Savsani, V.J.; Vakharia, D.P. Teaching—Learning-based optimization: An optimization method for continuous non-linear large scale problems. Inf. Sci. 2012, 183, 1–15. [Google Scholar] [CrossRef]
- Guo, L.; Meng, Z.; Sun, Y.; Wang, L. Parameter identification and sensitivity analysis of solar cell models with cat swarm optimization algorithm. Energy Convers. Manag. 2016, 108, 520–528. [Google Scholar] [CrossRef]
- Mahdy, A.; El-Sehiemy, R.; Shaheen, A.; Ginidi, A.; Elbarbary, Z.M.S. An Improved Artificial Ecosystem Algorithm for Economic Dispatch with Combined Heat and Power Units. Appl. Sci. 2022, 12, 11773. [Google Scholar] [CrossRef]
- El-Sehiemy, R.; Shaheen, A.; Ginidi, A.; Elhosseini, M. A Honey Badger Optimization for Minimizing the Pollutant Environmental Emissions-Based Economic Dispatch Model Integrating Combined Heat and Power Units. Energies 2022, 15, 7603. [Google Scholar] [CrossRef]
- Ginidi, A.; Elsayed, A.; Shaheen, A.; Elattar, E.; El-Sehiemy, R. An Innovative Hybrid Heap-Based and Jellyfish Search Algorithm for Combined Heat and Power Economic Dispatch in Electrical Grids. Mathematics 2021, 9, 2053. [Google Scholar] [CrossRef]
- Elshahed, M.; Tolba, M.A.; El-Rifaie, A.M.; Ginidi, A.; Shaheen, A.; Mohamed, S.A. An Artificial Rabbits’ Optimization to Allocate PVSTATCOM for Ancillary Service Provision in Distribution Systems. Mathematics 2023, 11, 339. [Google Scholar] [CrossRef]
















| Parameter | RTC France PV Cell | Ultra 85-P PV Panel | ||
|---|---|---|---|---|
| Lower | Upper | Lower | Upper | |
| Is1, Is2, Is3 (μA) | 0.00 | 1.00 | 0.00 | 10.00 |
| IPh (A) | 0.00 | 1.00 | 0.00 | 10.00 |
| Rsh (Ω) | 0.00 | 100.00 | 0.00 | 100.00 |
| Rs (Ω) | 0.00 | 0.50 | 0.00 | 2.00 |
| η1, η2, η3 per cell | 1.00 | 2.00 | 1.00 | 2.00 |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 0.7607755 | 0.7605558 | 0.7607653 | 0.7606034 |
| Rsh (Ω) | 0.0363771 | 0.0358427 | 0.0362887 | 0.0357996 |
| Rs (Ω) | 53.7185260 | 58.9141185 | 54.3393156 | 60.0352518 |
| Is1 (A) | 0.0000003 | 0.0000004 | 0.0000003 | 0.0000004 |
| η1 | 1.4811836 | 1.4943328 | 1.4834317 | 1.4966056 |
| RMSE | 0.0009860 | 0.0010212 | 0.0009869 | 0.0010309 |
| Difference compared to MSA | - | 3.52 × 10−5 | 9.15 × 10−7 | 4.48 × 10−5 |
| Improvement | - | 3.45% | 0.09% | 4.35% |
| Algorithms | RMSE |
|---|---|
| MSA | 0.0009860 |
| DMO | 0.0010212 |
| NNA | 0.0009869 |
| ZOA | 0.0010309 |
| GA with NUM [49] | 9.8618 × 10−4 |
| Mutated BBO [50] | 9.8634 × 10−4 |
| TLBO [51] | 9.8733 × 10−4 |
| ABC [52] | 10 × 10−4 |
| Improved DE [51] | 9.89 × 10−4 |
| Chaotic PSO [51] | 13.8607 × 10−4 |
| HSBA [53] | 9.95146 × 10−4 |
| GWO [54] | 75.011 × 10−4 |
| JAYA [55] | 9.8946 × 10−4 |
| Comprehensive Learning PSO [56] | 9.9633 × 10−4 |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 0.76078221 | 0.761086003 | 0.760790742 | 0.76087427 |
| Rsh (Ω) | 0.03665767 | 0.036452844 | 0.036596751 | 0.036829377 |
| Rs (Ω) | 55.12971603 | 56.0407128 | 53.33855515 | 50.98794622 |
| Is1 (A) | 2.43012 × 10−7 | 3.81141 × 10−7 | 1.84217 × 10−7 | 2.56794 × 10−7 |
| η1 | 1.457158843 | 1.83357911 | 1.448493654 | 1.461518645 |
| Is2 (A) | 6.04558 × 10−7 | 2.38858 × 10−7 | 1.80839 × 10−7 | 1.16674 × 10−7 |
| η2 | 1.996965209 | 1.458364626 | 1.589535404 | 1.777597367 |
| RMSE | 0.000982718 | 0.001028696 | 0.000987219 | 0.001001673 |
| Difference compared to MSA | - | 4.60 × 10−5 | 4.50 × 10−6 | 1.90 × 10−5 |
| Improvement | - | 4.47% | 0.46% | 1.89% |
| Algorithms | RMSE |
|---|---|
| MSA | 0.000982718 |
| DMO | 0.001028696 |
| NNA | 0.000987219 |
| ZOA | 0.001001673 |
| BWOA [30] * | 0.0009773823 * |
| ABC | 1.28482 × 10−3 |
| Teaching–learning–based ABC | 1.50482 × 10−3 |
| Generalised oppositional TLBO | 4.43212 × 10−3 |
| TLBO | 1.52057 × 10−3 |
| Cat swarm algorithm | 1.22 × 10−3 |
| Sine cosine approach | 9.86863 × 10−4 |
| Comprehensive learning PSO | 1.3991 × 10−3 |
| Flower pollination algorithm | 1.934336 × 10−3 |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 0.760771771 | 0.760598554 | 0.760746273 | 0.760933659 |
| Rsh (Ω) | 0.036624048 | 0.035617495 | 0.037016425 | 0.035602637 |
| RS (Ω) | 54.85092436 | 71.78477566 | 58.21689511 | 56.95493745 |
| IS1 (A) | 2.47337 × 10−7 | 4.56677 × 10−7 | 5.28442 × 10−7 | 1.54528 × 10−7 |
| η1 | 1.458909504 | 1.862177339 | 1.585110202 | 1.444120881 |
| IS2 (A) | 1.8128 × 10−7 | 4.77356 × 10−7 | 1.34494 × 10−8 | 4.93567 × 10−8 |
| η2 | 1.982050848 | 1.685843012 | 1.289423782 | 1.699258208 |
| IS3 (A) | 2.8619 × 10−7 | 1.05595 × 10−7 | 1.01943 × 10−7 | 3.50553 × 10−7 |
| η3 | 1.933021037 | 1.410321073 | 1.999680734 | 1.631958875 |
| RMSE | 0.000983323 | 0.001233216 | 0.001005292 | 0.001108423 |
| Difference compared to MSA | - | 2.50 × 10−4 | 2.20 × 10−5 | 1.25 × 10−4 |
| Improvement | - | 20.26% | 2.19% | 11.29% |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 5.227492636 | 5.209587967 | 5.227413736 | 5.180799436 |
| Rsh (Ω) | 0.011074354 | 0.010647702 | 0.011071209 | 0.010118476 |
| Rs (Ω) | 3.764442466 | 4.952758368 | 3.770662178 | 23.47359277 |
| Is1 (A) | 1.01117 × 10−5 | 1.64942 × 10−5 | 1.01497 × 10−5 | 3.1682 × 10−5 |
| η1 | 1.56462094 | 1.624721679 | 1.565062489 | 1.711091626 |
| RMSE | 0.003563198 | 0.008172571 | 0.003563424 | 0.013722439 |
| Difference compared to MSA | - | 0.004609373 | 2.26221 × 10−7 | 0.010159241 |
| Improvement | - | 56.40% | 0.01% | 74.03% |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 5.225245297 | 5.192576302 | 5.217578751 | 5.17870078 |
| Rsh (Ω) | 0.011028319 | 0.01018628 | 0.010966592 | 0.010245894 |
| Rs (Ω) | 3.894603375 | 10.09141719 | 4.80950381 | 23.72714823 |
| Is1 (A) | 1.84526 × 10−7 | 4.1711 × 10−6 | 2.87875 × 10−5 | 1.87291 × 10−5 |
| η1 | 1.995046933 | 1.602714205 | 2 | 1.716772886 |
| Is2 (A) | 1.06059 × 10−5 | 2.46318 × 10−5 | 5.64295 × 10−6 | 1.01294 × 10−5 |
| η2 | 1.57035711 | 1.726106004 | 1.517105615 | 1.669564389 |
| RMSE | 0.003621422 | 0.011392079 | 0.004672962 | 0.013473226 |
| Difference compared to MSA | - | 0.007770657 | 0.00105154 | 0.009851804 |
| Improvement | - | 68.21% | 22.50% | 73.12% |
| Applied Technique | MSA | DMO | NNA | ZOA |
|---|---|---|---|---|
| IPh (A) | 5.211524612 | 5.20406249 | 5.207590683 | 5.206605809 |
| Rsh (Ω) | 0.010830847 | 0.010216306 | 0.010615902 | 0.010011148 |
| Rs (Ω) | 5.096501608 | 9.728685738 | 6.482032244 | 7.526568705 |
| Is1 (A) | 4.95291 × 10−6 | 1.46832 × 10−5 | 2.02445 × 10−11 | 5.96796 × 10−6 |
| η1 | 1.592291062 | 1.639062307 | 1.945438395 | 1.845134969 |
| Is2 (A) | 7.29486 × 10−6 | 6.86358 × 10−6 | 5.17631 × 10−6 | 1.67964 × 10−5 |
| η2 | 1.590393766 | 1.862699049 | 1.530454645 | 1.774759034 |
| Is3 (A) | 5.29217 × 10−6 | 2.044 × 10−6 | 3.01439 × 10−6 | 1.17361 × 10−6 |
| η3 | 1.984877988 | 1.973364739 | 1.882800822 | 1.651100572 |
| RMSE | 0.005391459 | 0.012520036 | 0.007974089 | 0.012354068 |
| Difference compared to MSA | - | 0.007128577 | 0.00258263 | 0.006962609 |
| Improvement | - | 56.94% | 32.39% | 56.36% |
| 1DM | 2DM | 3DM | |
|---|---|---|---|
| No of solutions | 100 | 100 | 100 |
| No of iterations | 1000 | 1000 | 1000 |
| Dim | 5 | 7 | 9 |
| Complexity using O notation | O(500,000) × O(F(x)). | O(700,000) × O(F(x)). | O(900,000) × O(F(x)). |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Moustafa, G.; Alnami, H.; Hakmi, S.H.; Ginidi, A.; Shaheen, A.M.; Al-Mufadi, F.A. An Advanced Bio-Inspired Mantis Search Algorithm for Characterization of PV Panel and Global Optimization of Its Model Parameters. Biomimetics 2023, 8, 490. https://doi.org/10.3390/biomimetics8060490
Moustafa G, Alnami H, Hakmi SH, Ginidi A, Shaheen AM, Al-Mufadi FA. An Advanced Bio-Inspired Mantis Search Algorithm for Characterization of PV Panel and Global Optimization of Its Model Parameters. Biomimetics. 2023; 8(6):490. https://doi.org/10.3390/biomimetics8060490
Chicago/Turabian StyleMoustafa, Ghareeb, Hashim Alnami, Sultan Hassan Hakmi, Ahmed Ginidi, Abdullah M. Shaheen, and Fahad A. Al-Mufadi. 2023. "An Advanced Bio-Inspired Mantis Search Algorithm for Characterization of PV Panel and Global Optimization of Its Model Parameters" Biomimetics 8, no. 6: 490. https://doi.org/10.3390/biomimetics8060490