

Comparative Analysis of a Family of Sliding Mode Observers under Real-Time Conditions for the Monitoring in the Bioethanol Production
 ,
,
Abstract
:1. Introduction
2. Materials and Methods
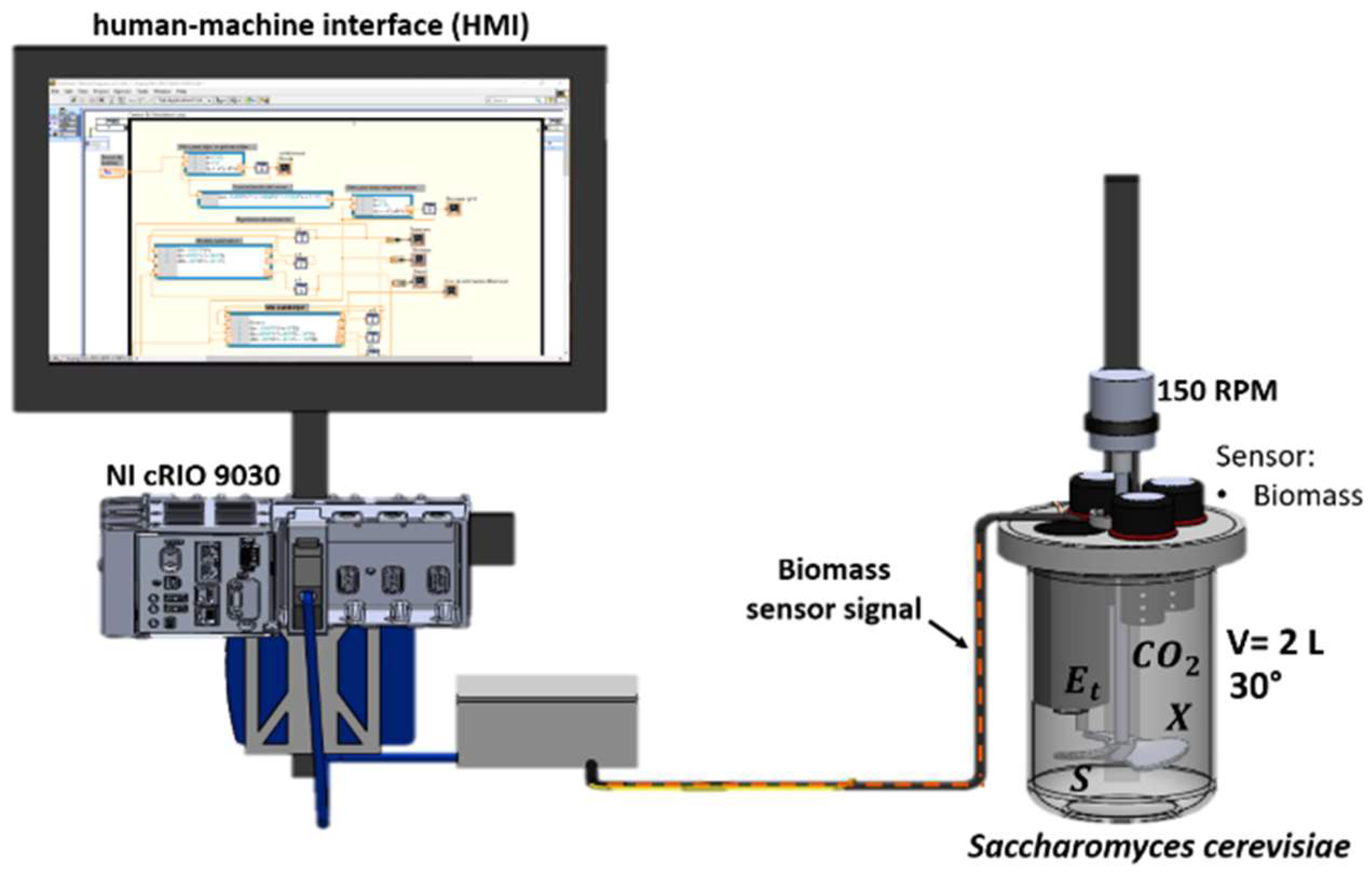
2.1. Batch Fermenter
- (a)
- NI CRIO-9030: high-performance real-time controller with a reconfigurable FPGA chassis, using a 1.33 GHz dual-core Intel Atom chip;
- (b)
- NI 9381: 24-bit analog input module for the cRIO real-time embedded system;
- (c)
- Turbidity sensor (used to determine the biomass concentration);
- (d)
- Tank with a capacity of 2 L;
- (e)
- 12 V voltage source;
- (f)
- LED monitor as a user interface.
2.2. Proposed Kinetic Model
2.2.1. Parametric Identification of the Kinetic Model
2.2.2. Parametric Sensitivity Analysis
2.3. Observability
Observability via an Inferential Diagram
- (a)
- Draw a bond, appears in the differential equation for . This implies that by monitoring it is possible to obtain information about .
- (b)
- Decompose the inference diagram into a unique set of maximal strongly connected components (SCC). SCCs are subgraphs selected such that there is a direct path from every node to every other node in the subgraph. Dotted lines enclose the SCCs. It is worth noting that each node in an SCC contains information about the other nodes. The so-called root SCCs do not have output links.
- (c)
- We chose at least one node of each root SCC, which would be the sensor node, to guarantee the observability of the whole system.
- The links in capture the pattern of interaction between the state variables: there is a link from to in the graph if is nonzero.
- A node in the graph is a sensor node if for some .
- A node is an objective node if for some .
2.4. Statistical Correlation Criteria
2.5. State Observers for Batch Bioreactor Fermentations
2.5.1. Sliding-Mode Observers (SMOs)
Classic Sliding-Mode Observer
Proportional Sliding-Mode Observer (PSMO)
High-Order Sliding-Mode Observer (HOSMO)
2.6. Performance Indexes
3. Results and Discussion
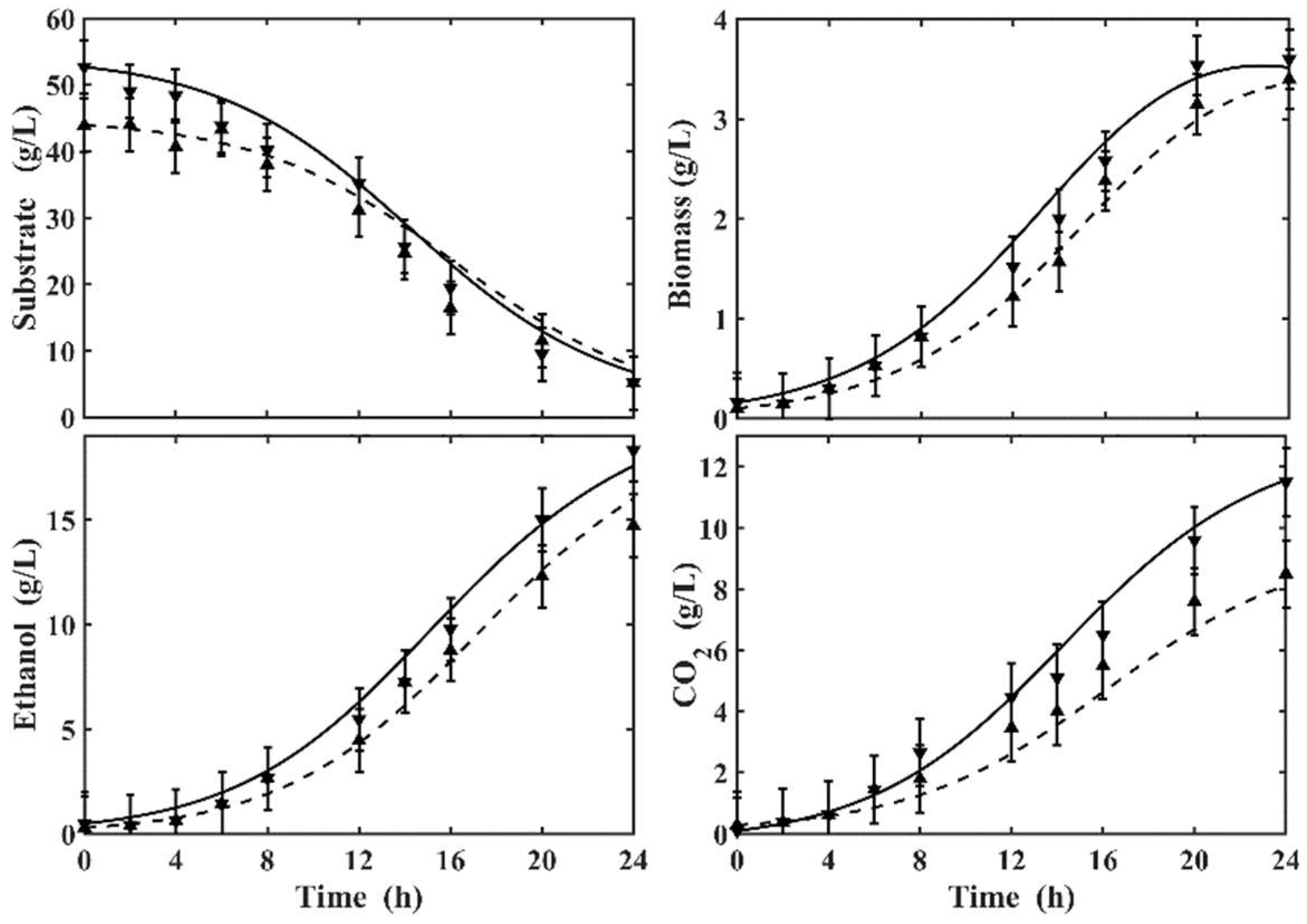
3.1. Bioreactor Performance
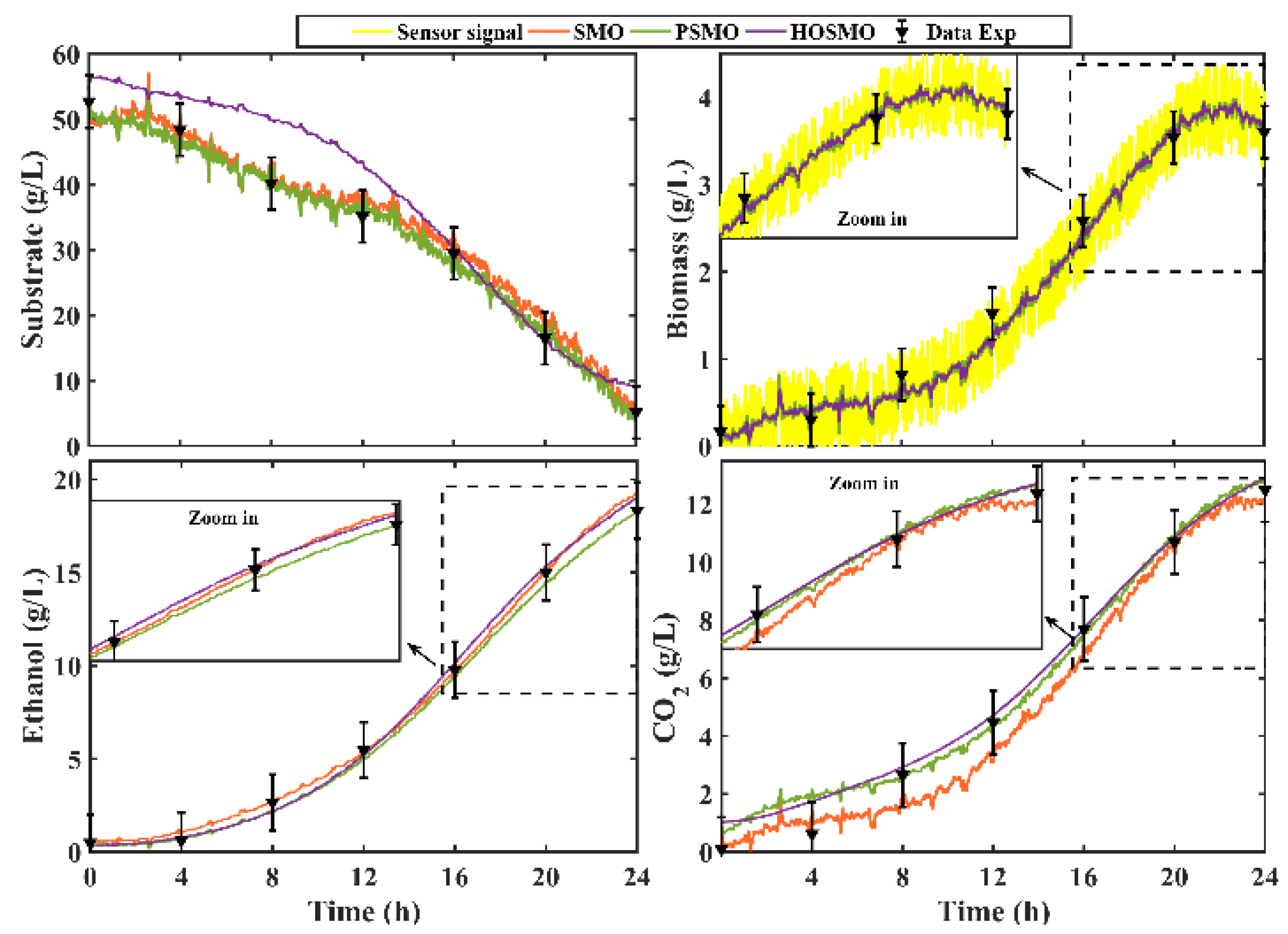
3.2. Simulation of Selected Sliding-Mode Observers
3.3. Implementation of the State Observers in Real-Time
Signal Conditioning of the Turbidity Biomass Sensor to Improve the Performance of the PSMO in Real-Time
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- López, R.A.; Pérez, P.A.L.; Femat, R. Control in Bioprocessing: Modeling, Estimation and the Use of Soft Sensors; John Wiley & Sons: New York, NY, USA, 2020. [Google Scholar]
- Rincón, A.; Hoyos, F.E.; Restrepo, G.M. Design and Evaluation of a Robust Observer Using Dead-Zone Lyapunov Functions—Application to Reaction Rate Estimation in Bioprocesses. Fermentation 2022, 8, 173. [Google Scholar] [CrossRef]
- Hrnčiřík, P. Monitoring of Biopolymer Production Process Using Soft Sensors Based on Off-Gas Composition Analysis and Capacitance Measurement. Fermentation 2021, 7, 318. [Google Scholar] [CrossRef]
- Yu, S.I.; Rhee, C.; Cho, K.H.; Shin, S.G. Comparison of different machine learning algorithms to estimate liquid level for bioreactor management. Environ. Eng. Res. 2022, 28, 220037. [Google Scholar] [CrossRef]
- Alexander, R.; Campani, G.; Dinh, S.; Lima, F.V. Challenges and opportunities on nonlinear state estimation of chemical and biochemical processes. Processes 2020, 8, 1462. [Google Scholar] [CrossRef]
- Dochain, D. State and parameter estimation in chemical and biochemical processes: A tutorial. J. Process Control 2003, 13, 801–818. [Google Scholar] [CrossRef]
- Ali, J.M.; Hoang, N.H.; Hussain, M.A.; Dochain, D. Review and classification of recent observers applied in chemical process systems. Comput. Chem. Eng. 2015, 76, 27–41. [Google Scholar]
- Aguilar-López, R.; Maya-Yescas, R. State estimation for nonlinear systems under model uncertainties: A class of sliding-mode observers. J. Process Control 2005, 15, 363–370. [Google Scholar] [CrossRef]
- Cabrera, A.; Aranda, J.; Chairez, J.; Ramirez, M.G. Neural observer to trehalose estimation. IFAC Proc. Vol. 2008, 41, 9631–9636. [Google Scholar] [CrossRef]
- Alcaraz-González, V.; Harmand, J.; Rapaport, A.; Steyer, J.P.; Gonzalez-Alvarez, V.; Pelayo-Ortiz, C. Software sensors for highly uncertain WWTPs: A new approach based on interval observers. Water Res. 2002, 36, 2515–2524. [Google Scholar] [CrossRef]
- Dewasme, L.; Sbarciog, M.; Rocha-Cozatl, E.; Haugen, F.; Wouwer, A.V. State and unknown input estimation of an anaerobic digestion reactor with experimental validation. Control Eng. Pract. 2019, 85, 280–289. [Google Scholar] [CrossRef]
- Petre, E.; Sendrescu, D.; Selişteanu, D.; Roman, M. Estimation Based Control Strategies for an Alcoholic Fermentation Process with Unknown Inputs. In Proceedings of the 2019 23rd International Conference on System Theory, Control and Computing (ICSTCC), Sinaia, Romania, 9–11 October 2019; pp. 224–229. [Google Scholar]
- Ortega, F.A.; Pérez, O.A.; López, E.A. Comparison of the Performance of Nonlinear State Estimators to Determine the Concentration of Biomass and Substrate in a Bioprocess. Inf. Technol. 2015, 26, 35–44. [Google Scholar]
- Quintero, O.; Amicarelli, A.; di Sciascio, F. Recursive Bayesian filtering for states estimation: An application case in biotechnological processes. In Proceedings of the MCMSki (3rd IMS-ISBA) Meeting, Bormio, Italy, 9–11 January 2008; pp. 9–11. [Google Scholar]
- Bricio-Barrios, E.E.; Arceo-Dıaz, S.; Henández-Escoto, H.; López-Caamal, F. Estimación de biomasa y control geométrico del proceso de fermentación de cerveza en operación batch. AMCA 2018, 10–12, 219–224. [Google Scholar]
- Lisci, S.; Grosso, M.; Tronci, S. A geometric observer-assisted approach to tailor state estimation in a bioreactor for ethanol production. Processes 2020, 8, 480. [Google Scholar] [CrossRef] [Green Version]
- Duan, Z.; Kravaris, C. Nonlinear observer design for two-time-scale systems. AIChE J. 2020, 66, e16956. [Google Scholar] [CrossRef]
- Avilés, J.D.; Torres-Zúñiga, I.; Villa-Leyva, A.; Vargas, A.; Buitrón, G. Experimental validation of an interval observer-based sensor fault detection strategy applied to a biohydrogen production dark fermenter. J. Process Control 2022, 114, 131–142. [Google Scholar] [CrossRef]
- Grisales Díaz, V.H.; Willis, M.J. Ethanol production using Zymomonas mobilis: Development of a kinetic model describing glucose and xylose co-fermentation. Biomass Bioenergy 2019, 123, 41–50. [Google Scholar] [CrossRef]
- Cortes, T.R.; Cuervo-Parra, J.A.; Robles-Olvera, V.J.; Cortes, E.R.; Perez, P.A.L. Experimental and Kinetic Production of Ethanol Using Mucilage Juice Residues from Cocoa Processing. Int. J. Chem. Reactor Eng. 2018, 16, 1–16. [Google Scholar] [CrossRef]
- Nguyen, B.T.; Rittmann, B.E. Low-cost optical sensor to automatically monitor and control biomass concentration in microalgal cultivation. Algal Res. 2018, 32, 101–106. [Google Scholar] [CrossRef]
- Dawood, M.A.M.; Taha, M.G.A.E.; Ali, H.E. Production of Bio-Ethanol from Potato Starch Wastes by Saccharomyces cerevisiae. Egypt. J. Appl. Sci. 2019, 34, 256–267. [Google Scholar]
- Ghanian, Z.; Konduri, G.G.; Audi, S.H.; Camara, A.K.; Ranji, M. Quantitative optical measurement of mitochondrial superoxide dynamics in pulmonary artery endothelial cells. J. Innov. Opt. Health Sci. 2018, 11, 1750018. [Google Scholar] [CrossRef] [PubMed]
- Gagliano, A.; Nocera, F.; Bruno, M. Simulation models of biomass thermochemical conversion processes, gasification and pyrolysis, for the prediction of the energetic potential. In Advances in Renewable Energies and Power Technologies; Elsevier: Amsterdam, The Netherlands, 2018; pp. 39–85. [Google Scholar]
- Vertis, C.S.; Oliveira, N.M.; Bernardo, F.P. Systematic development of kinetic models for systems described by linear reaction schemes. In Computer Aided Chemical Engineering; Elsevier: Amsterdam, The Netherlands, 2015; Volume 37, pp. 647–652. [Google Scholar]
- Alvarado-Santos, E.; Aguilar-López, R.; Neria-González, M.I.; Romero-Cortés, T.; Robles-Olvera, V.J.; López-Pérez, P.A. A novel kinetic model for a cocoa waste fermentation to ethanol reaction and its experimental validation. Prep. Biochem. Biotechnol. 2022, 1–16. [Google Scholar] [CrossRef] [PubMed]
- Ciesielski, A.; Grzywacz, R. Nonlinear analysis of cybernetic model for aerobic growth of Saccharomyces cerevisiae in a continuous stirred tank bioreactor. Static bifurcations. Biochem. Eng. J. 2019, 146, 88–96. [Google Scholar] [CrossRef]
- Ciesielski, A.; Grzywacz, R. Dynamic bifurcations in continuous process of bioethanol production under aerobic conditions using Saccharomyces cerevisiae. Biochem. Eng. J. 2020, 161, 107609. [Google Scholar] [CrossRef]
- Almquist, J.; Cvijovic, M.; Hatzimanikatis, V.; Nielsen, J.; Jirstrand, M. Kinetic models in industrial biotechnology– Improving cell factory performance. Metab. Eng. 2014, 24, 38–60. [Google Scholar] [CrossRef]
- Moles, C.G. Parameter Estimation in Biochemical Pathways: A Comparison of Global Optimization Methods. Genome Res. 2003, 13, 2467–2474. [Google Scholar] [CrossRef] [PubMed]
- Oliva, D.; Abd El Aziz, M.; Ella Hassanien, A. Parameter estimation of photovoltaic cells using an improved chaotic whale optimization algorithm. Appl. Energy 2017, 200, 141–154. [Google Scholar] [CrossRef]
- Liu, Y.Y.; Slotine, J.J.; Barabási, A.L. Observability of complex systems. Proc. Natl. Acad. Sci. USA 2013, 110, 2460–2465. [Google Scholar] [CrossRef]
- Montanari, A.N.; Duan, C.; Aguirre, L.A.; Motter, A.E. Functional observability and target state estimation in large-scale networks. Proc. Natl. Acad. Sci. USA 2022, 119, e2113750119. [Google Scholar] [CrossRef]
- Nuñez, S.; De Battista, H.; Garelli, F.; Vignoni, A.; Picó, J. Second-order sliding mode observer for multiple kinetic rates estimation in bioprocesses. Control Eng. Pract. 2013, 21, 1259–1265. [Google Scholar] [CrossRef]
- Shtessel, Y.; Edwards, C.; Fridman, L.; Levant, A. Sliding Mode Control and Observation; Springer: New York, NY, USA, 2014; Volume 10. [Google Scholar]
- Slotine, J.J.E.; Li, W. Applied Nonlinear Control; Prentice Hall: Englewood Cliffs, NJ, USA, 1991; Volume 199, p. 238. [Google Scholar]
- Nuñez, S.; Garelli, F.; De Battista, H. Sliding mode observer for biomass estimation in a biohydrogen production process. Int. J. Hydrog. Energy 2012, 37, 10089–10094. [Google Scholar] [CrossRef]
- Engel, R.; Kreisselmeier, G. A continuous-time observer which converges in finite time. IEEE Trans. Autom. Control 2002, 47, 1202–1204. [Google Scholar] [CrossRef]
- Bertoni, G.; Punta, E. Chattering elimination with second order sliding-modes robust to Coulomb friction. J. Dyn. Meas. Control 2000, 122, 679–684. [Google Scholar]
- Hong, Y.; Xu, Y.; Huang, J. Finite-time control for robot manipulators. Syst. Control Lett. 2002, 46, 243–253. [Google Scholar] [CrossRef]
- Aguilar-López, R.; López-Pérez, P.A.; Neria-González, M.I.; Domínguez-Bocanegra, A.R. Observer based adaptive model for a class of aerobic batch bioreactor. Revista Mexicana de Ingeniería Química 2010, 9, 29–35. [Google Scholar]
- Reimann, A.; Hay, T.; Echterhof, T.; Kirschen, M.; Pfeifer, H. Application and Evaluation of Mathematical Models for Prediction of the Electric Energy Demand Using Plant Data of Five Industrial-Size EAFs. Metals 2021, 11, 1348. [Google Scholar] [CrossRef]
- Take Your First Measurement with LabVIEW Real-Time (Data Logging). Available online: https://knowledge.ni.com/KnowledgeArticleDetails?id=kA03q000000x0UdCAI&l=es-MX (accessed on 3 April 2022).
- Elhaj, N.; Sedra, M.B.; Djeghloud, H. DFPI-based Control of the DC-bus Voltage and the AC-side Current of a Shunt Active Power Filter. Bull. Electr. Eng. Inform. 2016, 5, 430–441. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Observer | Process | Measured Variables | Estimated Variables | References |
|---|---|---|---|---|
| Sliding-mode observer | Model of a stirred tank | Substrate concentration | Substrate consumption rate | [8] |
| Neural networks | Fermentation for yeast production by Saccharomyces cerevisiae | Substrate concentration volume of the medium | Biomass concentration Trehalose concentration | [9] |
| Asymptotic observer | Continuous fixed-bed anaerobic reactor used for wastewater treatment | Flow of O2 in and out, volume, inlet fructose, and nitrogen concentration | Biomass concentration | [10] |
| Sliding-mode observer | Alcoholic fermentation process | Substrate and ethanol concentration | Influent substrate | [12] |
| Extended Kalman filter | Anaerobic digestion pilot plant | Methane flow outlet | Substrate concentration | [13] |
| Recursive Bayesian filter | Alcoholic fermentation by Zymomonas mobilis M | Substrate and product concentration | Biomass concentration | [14] |
| Super-twisting observer | Beer fermentation | Reducing sugars and ethanol via HPLC | Biomass concentration | [15] |
| Geometric observer | Yeast fermenter | Substrate concentration | Biomass concentration | [16] |
| Extended Luenberger observer | Anaerobic digestion model | Biomass concentration and volatile fatty acids | Concentrations of methane and carbon dioxide | [17] |
| Hybrid observer (linear and nonlinear Luenberger observer) | Biohydrogen production fermenter model | Concentrations of glucose and biomass | Production of hydrogen | [18] |
| Symbol | Value | Units | Definition |
|---|---|---|---|
| L/gh | Substrate kinetic constant | ||
| L/gh | Biomass kinetic constant | ||
| L/gh | Ethanol kinetic constant | ||
| L/gh | kinetic constant | ||
| Kinetic constant | |||
| Kinetic constant |
| Variable | |||
|---|---|---|---|
| Substrate | |||
| Biomass | |||
| Ethanol | |||
| Substrate | |||
| Biomass | |||
| Ethanol | |||
| Observer | IAE | ISE | ||||||
|---|---|---|---|---|---|---|---|---|
| OSM | 3.889 | 2.556 | 0.988 | 14.39 | 10.83 | 6.44 | 0.187 | 11.61 |
| OPSM | 2.864 | 2.521 | 0.874 | 12.45 | 5.384 | 6.495 | 0.175 | 9.566 |
| OHOSM | 30.27 | 2.614 | 26.32 | 40.99 | 23.23 | 30.4 | 1.026 | 14.99 |
| Observer | IAE | ISE | ||||||
|---|---|---|---|---|---|---|---|---|
| OSM | 2.364 | 0.268 | 0.476 | 1.006 | 6.076 | 0.018 | 0.074 | 0.433 |
| OPSM | 1.495 | 0.266 | 0.392 | 0.689 | 2.791 | 0.017 | 0.058 | 0.248 |
| OHOSM | 27.54 | 0.294 | 1.56 | 2.845 | 13.29 | 0.021 | 0.854 | 3.151 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Alvarado-Santos, E.; Mata-Machuca, J.L.; López-Pérez, P.A.; Garrido-Moctezuma, R.A.; Pérez-Guevara, F.; Aguilar-López, R. Comparative Analysis of a Family of Sliding Mode Observers under Real-Time Conditions for the Monitoring in the Bioethanol Production. Fermentation 2022, 8, 446. https://doi.org/10.3390/fermentation8090446
Alvarado-Santos E, Mata-Machuca JL, López-Pérez PA, Garrido-Moctezuma RA, Pérez-Guevara F, Aguilar-López R. Comparative Analysis of a Family of Sliding Mode Observers under Real-Time Conditions for the Monitoring in the Bioethanol Production. Fermentation. 2022; 8(9):446. https://doi.org/10.3390/fermentation8090446
Chicago/Turabian StyleAlvarado-Santos, Eduardo, Juan L. Mata-Machuca, Pablo A. López-Pérez, Rubén A. Garrido-Moctezuma, Fermín Pérez-Guevara, and Ricardo Aguilar-López. 2022. "Comparative Analysis of a Family of Sliding Mode Observers under Real-Time Conditions for the Monitoring in the Bioethanol Production" Fermentation 8, no. 9: 446. https://doi.org/10.3390/fermentation8090446