
Thermo-Responsive Hydrogel-Based Soft Valves with Annular Actuation Calibration and Circumferential Gripping
 ,
,  , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Materials
2.2. NPHV Manufacturing
2.3. PAHV Manufacturing
2.4. Actuation Mechanism
2.5. Dehydration/Rehydration Kinetics
2.6. Finite Element (FE) Simulations
3. Results
3.1. NPHV’s Thermo-Mechanical Performance
3.2. PAHV’s Thermal Actuation
3.3. PAHV Thermo-Mechanical Performance
3.4. PAHV Dehydration Kinetics
3.5. PAHV Rehydration Kinetics
4. NPHV and PAHV Performance Comparison
5. Applications
5.1. PAHV Fluid Flow Control Valve
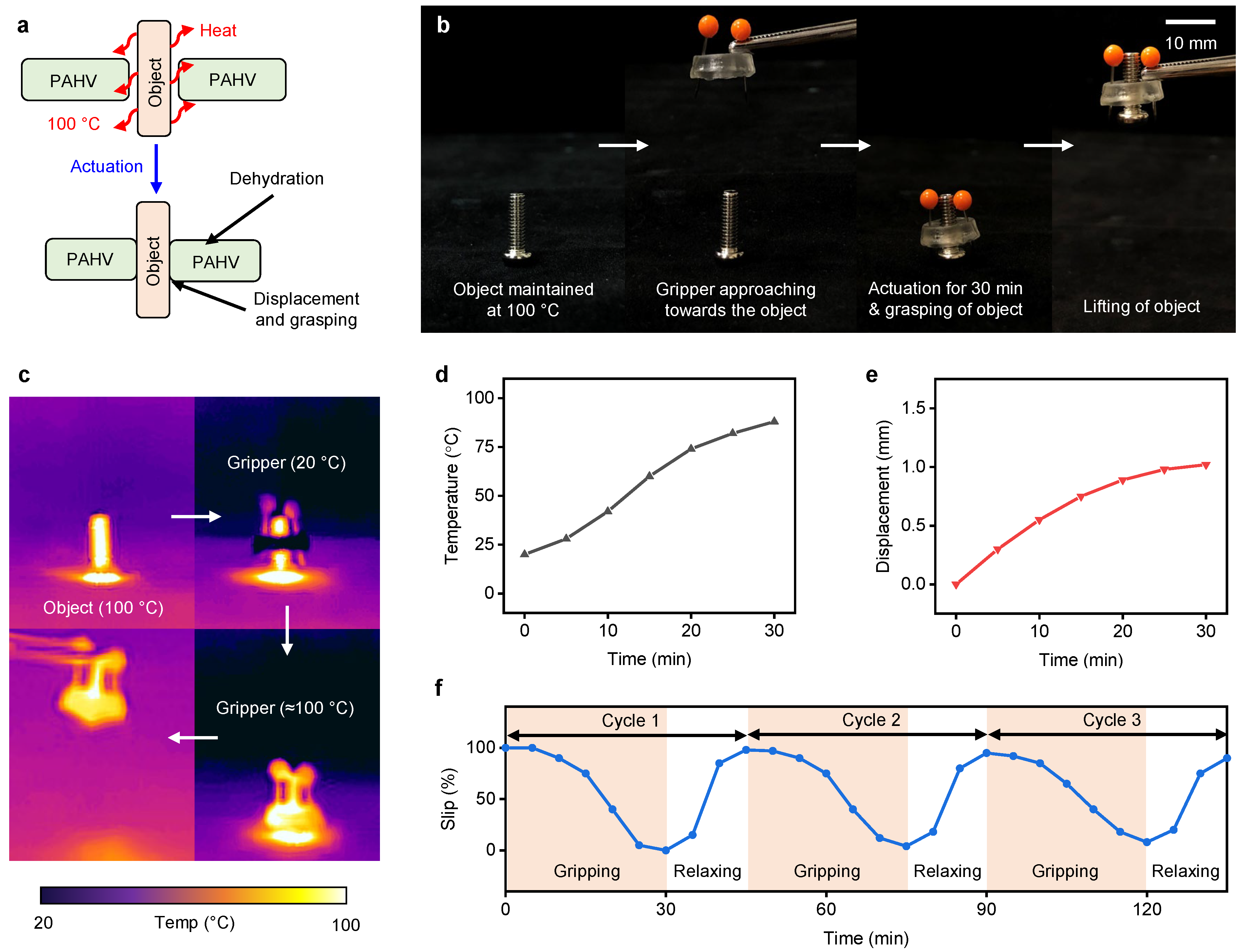
5.2. PAHV Circumferential Gripper
6. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
Abbreviations
| NPHV | N-Isopropylacrylamide hydrogels-based valve |
| PAHV | PAAm-alinate hydrogels-based valve |
References
- Cao, Z.Q.; Wang, G.J. Multi-stimuli-responsive polymer materials: Particles, films, and bulk gels. Chem. Rec. 2016, 16, 1398–1435. [Google Scholar] [CrossRef] [PubMed]
- Eddington, D.T.; Beebe, D.J. Flow control with hydrogels. Adv. Drug Deliv. Rev. 2004, 56, 199–210. [Google Scholar] [CrossRef]
- Lee, Y.; Song, W.; Sun, J.Y. Hydrogel soft robotics. Mater. Today Phys. 2020, 15, 100258. [Google Scholar] [CrossRef]
- Banerjee, H.; Suhail, M.; Ren, H. Hydrogel actuators and sensors for biomedical soft robots: Brief overview with impending challenges. Biomimetics 2018, 3, 15. [Google Scholar] [CrossRef] [Green Version]
- Banerjee, H.; Ren, H. Electromagnetically responsive soft-flexible robots and sensors for biomedical applications and impending challenges. In Electromagnetic Actuation and Sensing in Medical Robotics; Springer: Berlin, Germany, 2018; pp. 43–72. [Google Scholar]
- Li, H.; Go, G.; Ko, S.Y.; Park, J.O.; Park, S. Magnetic actuated pH-responsive hydrogel-based soft micro-robot for targeted drug delivery. Smart Mater. Struct. 2016, 25, 027001. [Google Scholar] [CrossRef]
- Banerjee, H.; Ren, H. Optimizing double-network hydrogel for biomedical soft robots. Soft Robot. 2017, 4, 191–201. [Google Scholar] [CrossRef] [PubMed]
- Kalairaj, M.S.; Banerjee, H.; Lim, C.M.; Chen, P.Y.; Ren, H. Hydrogel-matrix encapsulated Nitinol actuation with self-cooling mechanism. RSC Adv. 2019, 9, 34244–34255. [Google Scholar] [CrossRef] [Green Version]
- Beebe, D.J.; Moore, J.S.; Bauer, J.M.; Yu, Q.; Liu, R.H.; Devadoss, C.; Jo, B.H. Functional hydrogel structures for autonomous flow control inside microfluidic channels. Nature 2000, 404, 588–590. [Google Scholar] [CrossRef]
- Kalairaj, M.S.; Banerjee, H.; Lopez, K.G.; Ren, H. Thermo-responsive hydrogel-based circular valve embedded with shape-memory actuators. In Flexible Robotics in Medicine: A Design Journey of Motion Generation Mechanisms and Biorobotic System Development; Academic Press: London, UK, 2020; p. 455. [Google Scholar]
- Yu, Q.; Bauer, J.M.; Moore, J.S.; Beebe, D.J. Responsive biomimetic hydrogel valve for microfluidics. Appl. Phys. Lett. 2001, 78, 2589–2591. [Google Scholar] [CrossRef]
- Wu, J.; Lin, Y.; Sun, J. Anisotropic volume change of poly (N-isopropylacrylamide)-based hydrogels with an aligned dual-network microstructure. J. Mater. Chem. 2012, 22, 17449–17451. [Google Scholar] [CrossRef]
- Tudor, A.; Saez, J.; Florea, L.; Benito-Lopez, F.; Diamond, D. Poly (ionic liquid) thermo-responsive hydrogel microfluidic actuators. Sens. Actuators Chem. 2017, 247, 749–755. [Google Scholar] [CrossRef]
- Danko, M.; Kronekova, Z.; Mrlik, M.; Osicka, J.; bin Yousaf, A.; Mihalova, A.; Tkac, J.; Kasak, P. Sulfobetaines meet carboxybetaines: Modulation of thermo-and ion-responsivity, water structure, mechanical properties, and cell adhesion. Langmuir 2018, 35, 1391–1403. [Google Scholar] [CrossRef] [PubMed]
- Kasak, P.; Danko, M.; Zavahir, S.; Mrlik, M.; Xiong, Y.; Yousaf, A.B.; Lai, W.F.; Krupa, I.; Tkac, J.; Rogach, A.L. Identification of molecular fluorophore as a component of carbon dots able to induce gelation in a fluorescent multivalent-metal-ion-free alginate hydrogel. Sci. Rep. 2019, 9, 1–11. [Google Scholar]
- Lübtow, M.M.; Mrlik, M.; Hahn, L.; Altmann, A.; Beudert, M.; Lühmann, T.; Luxenhofer, R. Temperature-Dependent Rheological and Viscoelastic Investigation of a Poly (2-methyl-2-oxazoline)-b-poly (2-iso-butyl-2-oxazoline)-b-poly (2-methyl-2-oxazoline)-Based Thermogelling Hydrogel. J. Funct. Biomater. 2019, 10, 36. [Google Scholar] [CrossRef] [Green Version]
- Le, X.; Lu, W.; Zhang, J.; Chen, T. Recent progress in biomimetic anisotropic hydrogel actuators. Adv. Sci. 2019, 6, 1801584. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chin, S.Y.; Poh, Y.C.; Kohler, A.C.; Compton, J.T.; Hsu, L.L.; Lau, K.M.; Kim, S.; Lee, B.W.; Lee, F.Y.; Sia, S.K. Additive manufacturing of hydrogel-based materials for next-generation implantable medical devices. Sci. Robot. 2017, 2, eaah6451. [Google Scholar] [CrossRef]
- Banerjee, H.; Aaron, O.Y.W.; Yeow, B.S.; Ren, H. Fabrication and initial cadaveric trials of bi-directional soft hydrogel robotic benders aiming for biocompatible robot-tissue interactions. In Proceedings of the 2018 3rd International Conference on Advanced Robotics and Mechatronics (ICARM), Singapore, 18–20 July 2018; pp. 630–635. [Google Scholar]
- Lee, K.Y.; Mooney, D.J. Hydrogels for tissue engineering. Chem. Rev. 2001, 101, 1869–1880. [Google Scholar] [CrossRef] [PubMed]
- Vashist, A.; Vashist, A.; Gupta, Y.; Ahmad, S. Recent advances in hydrogel based drug delivery systems for the human body. J. Mater. Chem. B 2014, 2, 147–166. [Google Scholar] [CrossRef]
- Yuk, H.; Lin, S.; Ma, C.; Takaffoli, M.; Fang, N.X.; Zhao, X. Hydraulic hydrogel actuators and robots optically and sonically camouflaged in water. Nat. Commun. 2017, 8, 1–12. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yuk, H.; Lu, B.; Zhao, X. Hydrogel bioelectronics. Chem. Soc. Rev. 2019, 48, 1642–1667. [Google Scholar] [CrossRef] [Green Version]
- Lei, Z.; Wang, Q.; Sun, S.; Zhu, W.; Wu, P. A bioinspired mineral hydrogel as a self-healable, mechanically adaptable ionic skin for highly sensitive pressure sensing. Adv. Mater. 2017, 29, 1700321. [Google Scholar] [CrossRef] [PubMed]
- Su, G.; Cao, J.; Zhang, X.; Zhang, Y.; Yin, S.; Jia, L.; Guo, Q.; Zhang, X.; Zhang, J.; Zhou, T. Human-tissue-inspired anti-fatigue-fracture hydrogel for a sensitive wide-range human–machine interface. J. Mater. Chem. A 2020, 8, 2074–2082. [Google Scholar] [CrossRef]
- Zhang, X.; Xu, B.; Puperi, D.S.; Yonezawa, A.L.; Wu, Y.; Tseng, H.; Cuchiara, M.L.; West, J.L.; Grande-Allen, K.J. Integrating valve-inspired design features into poly (ethylene glycol) hydrogel scaffolds for heart valve tissue engineering. Acta Biomater. 2015, 14, 11–21. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Chen, W.H.; Liao, W.C.; Sohn, Y.S.; Fadeev, M.; Cecconello, A.; Nechushtai, R.; Willner, I. Stimuli-Responsive Nucleic Acid-Based Polyacrylamide Hydrogel-Coated Metal–Organic Framework Nanoparticles for Controlled Drug Release. Adv. Funct. Mater. 2018, 28, 1705137. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, T.; Zhang, Y.; Qu, G.; Wei, S.; Liu, Z.; Kong, T. Ultrastretchable and Wireless Bioelectronics Based on All-Hydrogel Microfluidics. Adv. Mater. 2019, 31, 1902783. [Google Scholar] [CrossRef] [PubMed]
- Korde, J.M.; Kandasubramanian, B. Naturally biomimicked smart shape memory hydrogels for biomedical functions. Chem. Eng. J. 2020, 379, 122430. [Google Scholar] [CrossRef]
- Song, K.H.; Highley, C.B.; Rouff, A.; Burdick, J.A. Complex 3D-printed microchannels within cell-degradable hydrogels. Adv. Funct. Mater. 2018, 28, 1801331. [Google Scholar] [CrossRef]
- Liu, S.; Li, L. Ultrastretchable and self-healing double-network hydrogel for 3D printing and strain sensor. ACS Appl. Mater. Interfaces 2017, 9, 26429–26437. [Google Scholar] [CrossRef]
- Rothemund, P.; Ainla, A.; Belding, L.; Preston, D.J.; Kurihara, S.; Suo, Z.; Whitesides, G.M. A soft, bistable valve for autonomous control of soft actuators. Sci. Robot. 2018, 3, aar7986. [Google Scholar] [CrossRef] [Green Version]
- Wu, J.; Sailor, M.J. Chitosan hydrogel-capped porous SiO2 as a pH responsive nano-valve for triggered release of insulin. Adv. Funct. Mater. 2009, 19, 733–741. [Google Scholar] [CrossRef]
- D’Eramo, L.; Chollet, B.; Leman, M.; Martwong, E.; Li, M.; Geisler, H.; Dupire, J.; Kerdraon, M.; Vergne, C.; Monti, F.; et al. Microfluidic actuators based on temperature-responsive hydrogels. Microsyst. Nanoeng. 2018, 4, 1–7. [Google Scholar] [CrossRef]
- Marchese, A.D.; Onal, C.D.; Rus, D. Soft robot actuators using energy-efficient valves controlled by electropermanent magnets. In Proceedings of the 2011 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Francisco, CA, USA, 25–30 September 2011; pp. 756–761. [Google Scholar]
- Lê, T.P.; Jung, J. Implantable Device as Organ Valve Replacement. U.S. Patent 7,510,574, 31 March 2009. [Google Scholar]
- Tolley, M.T.; Shepherd, R.F.; Mosadegh, B.; Galloway, K.C.; Wehner, M.; Karpelson, M.; Wood, R.J.; Whitesides, G.M. A resilient, untethered soft robot. Soft Robot. 2014, 1, 213–223. [Google Scholar] [CrossRef]
- Rama Rao, G.; López, G.P. Encapsulation of Poly (N-Isopropyl Acrylamide) in Silica: A Stimuli-Responsive Porous Hybrid Material That Incorporates Molecular Nano-Valves. Adv. Mater. 2000, 12, 1692–1695. [Google Scholar] [CrossRef]
- Tripathi, B.P.; Dubey, N.C.; Simon, F.; Stamm, M. Thermo responsive ultrafiltration membranes of grafted poly (N-isopropyl acrylamide) via polydopamine. RSC Adv. 2014, 4, 34073–34083. [Google Scholar] [CrossRef]
- Mazaheri, H.; Baghani, M.; Naghdabadi, R.; Sohrabpour, S. Inhomogeneous swelling behavior of temperature sensitive PNIPAM hydrogels in micro-valves: Analytical and numerical study. Smart Mater. Struct. 2015, 24, 045004. [Google Scholar] [CrossRef]
- Yi, Y.; Zaher, A.; Yassine, O.; Kosel, J.; Foulds, I.G. A remotely operated drug delivery system with an electrolytic pump and a thermo-responsive valve. Biomicrofluidics 2015, 9, 052608. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Yi, Y.; Huang, R.; Li, C. Flexible substrate-based thermo-responsive valve applied in electromagnetically powered drug delivery system. J. Mater. Sci. 2019, 54, 3392–3402. [Google Scholar] [CrossRef]
- Haraguchi, K.; Takehisa, T. Nanocomposite hydrogels: A unique organic–inorganic network structure with extraordinary mechanical, optical, and swelling/de-swelling properties. Adv. Mater. 2002, 14, 1120–1124. [Google Scholar] [CrossRef]
- Liu, S.; Boatti, E.; Bertoldi, K.; Kramer-Bottiglio, R. Stimuli-induced bi-directional hydrogel unimorph actuators. Extrem. Mech. Lett. 2018, 21, 35–43. [Google Scholar] [CrossRef]
- Yang, H.; Ji, M.; Yang, M.; Shi, M.; Pan, Y.; Zhou, Y.; Qi, H.J.; Suo, Z.; Tang, J. Fabricating hydrogels to mimic biological tissues of complex shapes and high fatigue resistance. Matter 2021, 4, 1935–1946. [Google Scholar] [CrossRef]
- Mao, Y.; Ding, Z.; Yuan, C.; Ai, S.; Isakov, M.; Wu, J.; Wang, T.; Dunn, M.L.; Qi, H.J. 3D printed reversible shape changing components with stimuli responsive materials. Sci. Rep. 2016, 6, 1–13. [Google Scholar]
- Jeong, K.U.; Jang, J.H.; Kim, D.Y.; Nah, C.; Lee, J.H.; Lee, M.H.; Sun, H.J.; Wang, C.L.; Cheng, S.Z.; Thomas, E.L. Three-dimensional actuators transformed from the programmed two-dimensional structures via bending, twisting and folding mechanisms. J. Mater. Chem. 2011, 21, 6824–6830. [Google Scholar] [CrossRef]
- Morales, D.; Podolsky, I.; Mailen, R.W.; Shay, T.; Dickey, M.D.; Velev, O.D. Ionoprinted multi-responsive hydrogel actuators. Micromachines 2016, 7, 98. [Google Scholar] [CrossRef] [Green Version]
- Kim, J.; Hanna, J.A.; Byun, M.; Santangelo, C.D.; Hayward, R.C. Designing responsive buckled surfaces by halftone gel lithography. Science 2012, 335, 1201–1205. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Lee, H.; Xia, C.; Fang, N.X. First jump of microgel; actuation speed enhancement by elastic instability. Soft Matter 2010, 6, 4342–4345. [Google Scholar] [CrossRef] [Green Version]
- Morales, D.; Palleau, E.; Dickey, M.D.; Velev, O.D. Electro-actuated hydrogel walkers with dual responsive legs. Soft Matter 2014, 10, 1337–1348. [Google Scholar] [CrossRef] [PubMed]
- Stoychev, G.; Zakharchenko, S.; Turcaud, S.; Dunlop, J.W.; Ionov, L. Shape-programmed folding of stimuli-responsive polymer bilayers. ACS Nano 2012, 6, 3925–3934. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Duan, B.; Hockaday, L.A.; Kang, K.H.; Butcher, J.T. 3D bioprinting of heterogeneous aortic valve conduits with alginate/gelatin hydrogels. J. Biomed. Mater. Res. Part A 2013, 101, 1255–1264. [Google Scholar] [CrossRef] [Green Version]
- Di Giuseppe, M.; Law, N.; Webb, B.; Macrae, R.A.; Liew, L.J.; Sercombe, T.B.; Dilley, R.J.; Doyle, B.J. Mechanical behaviour of alginate-gelatin hydrogels for 3D bioprinting. J. Mech. Behav. Biomed. Mater. 2018, 79, 150–157. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Mohammadi Nasab, A.; Ye, Z.; Shan, W.; Majidi, C. Highly dynamic shape memory alloy actuator for fast moving soft robots. Adv. Mater. Technol. 2019, 4, 1800540. [Google Scholar] [CrossRef]
- Huang, X.; Kumar, K.; Jawed, M.K.; Nasab, A.M.; Ye, Z.; Shan, W.; Majidi, C. Chasing biomimetic locomotion speeds: Creating untethered soft robots with shape memory alloy actuators. Sci. Robot. 2018, 3, eaau7557. [Google Scholar] [CrossRef]
- Sun, Y.; Chen, L.; Jiang, Y.; Zhang, X.; Yao, X.; Soh, S. Soft stimuli-responsive grippers and machines with high load-to-weight ratios. Mater. Horiz. 2019, 6, 160–168. [Google Scholar] [CrossRef]
- Synytska, A.; Svetushkina, E.; Puretskiy, N.; Stoychev, G.; Berger, S.; Ionov, L.; Bellmann, C.; Eichhorn, K.J.; Stamm, M. Biocompatible polymeric materials with switchable adhesion properties. Soft Matter 2010, 6, 5907–5914. [Google Scholar] [CrossRef]
- Sun, J.Y.; Zhao, X.; Illeperuma, W.R.; Chaudhuri, O.; Oh, K.H.; Mooney, D.J.; Vlassak, J.J.; Suo, Z. Highly stretchable and tough hydrogels. Nature 2012, 489, 133–136. [Google Scholar] [CrossRef] [PubMed]
- Banerjee, H.; Kalairaj, M.S.; Ren, H.; Jusufi, A. Strong, Ultrastretchable Hydrogel-Based Multilayered Soft Actuator Composites Enhancing Biologically Inspired Pumping Systems. Adv. Eng. Mater 2021. [CrossRef]
- Li, M.; Wang, X.; Dong, B.; Sitti, M. In-air fast response and high speed jumping and rolling of a light-driven hydrogel actuator. Nat. Commun. 2020, 11, 1–10. [Google Scholar] [CrossRef]
- Tang, N.; Peng, Z.; Guo, R.; An, M.; Li, X.; Yang, N.; Zang, J. Thermal Conductivity of PAAm Hydrogel and its Crosslinking Effect. arXiv 2017, arXiv:1705.01417. [Google Scholar]
- Zhang, J.T.; Huang, S.W.; Liu, J.; Zhuo, R.X. Temperature Sensitive Poly [N-isopropylacrylamide-co-(acryloyl β-cyclodextrin)] for Improved Drug Release. Macromol. Biosci. 2005, 5, 192–196. [Google Scholar] [CrossRef]
- Zhang, N.; Zheng, S.; Pan, Z.; Liu, Z. Phase transition effects on mechanical properties of NIPA hydrogel. Polymers 2018, 10, 358. [Google Scholar] [CrossRef] [PubMed] [Green Version]











Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Sivaperuman Kalairaj, M.; Banerjee, H.; Senthil Kumar, K.; Lopez, K.G.; Ren, H. Thermo-Responsive Hydrogel-Based Soft Valves with Annular Actuation Calibration and Circumferential Gripping. Bioengineering 2021, 8, 127. https://doi.org/10.3390/bioengineering8090127
Sivaperuman Kalairaj M, Banerjee H, Senthil Kumar K, Lopez KG, Ren H. Thermo-Responsive Hydrogel-Based Soft Valves with Annular Actuation Calibration and Circumferential Gripping. Bioengineering. 2021; 8(9):127. https://doi.org/10.3390/bioengineering8090127
Chicago/Turabian StyleSivaperuman Kalairaj, Manivannan, Hritwick Banerjee, Kirthika Senthil Kumar, Keith Gerard Lopez, and Hongliang Ren. 2021. "Thermo-Responsive Hydrogel-Based Soft Valves with Annular Actuation Calibration and Circumferential Gripping" Bioengineering 8, no. 9: 127. https://doi.org/10.3390/bioengineering8090127