
Development of a New Wearable Device for the Characterization of Hand Tremor

 ,
,
Abstract
:1. Introduction
2. Materials and Methods
2.1. Development of the Wearable Device
2.2. Firmware and Mobile App
2.3. Data Acquisition and Processing
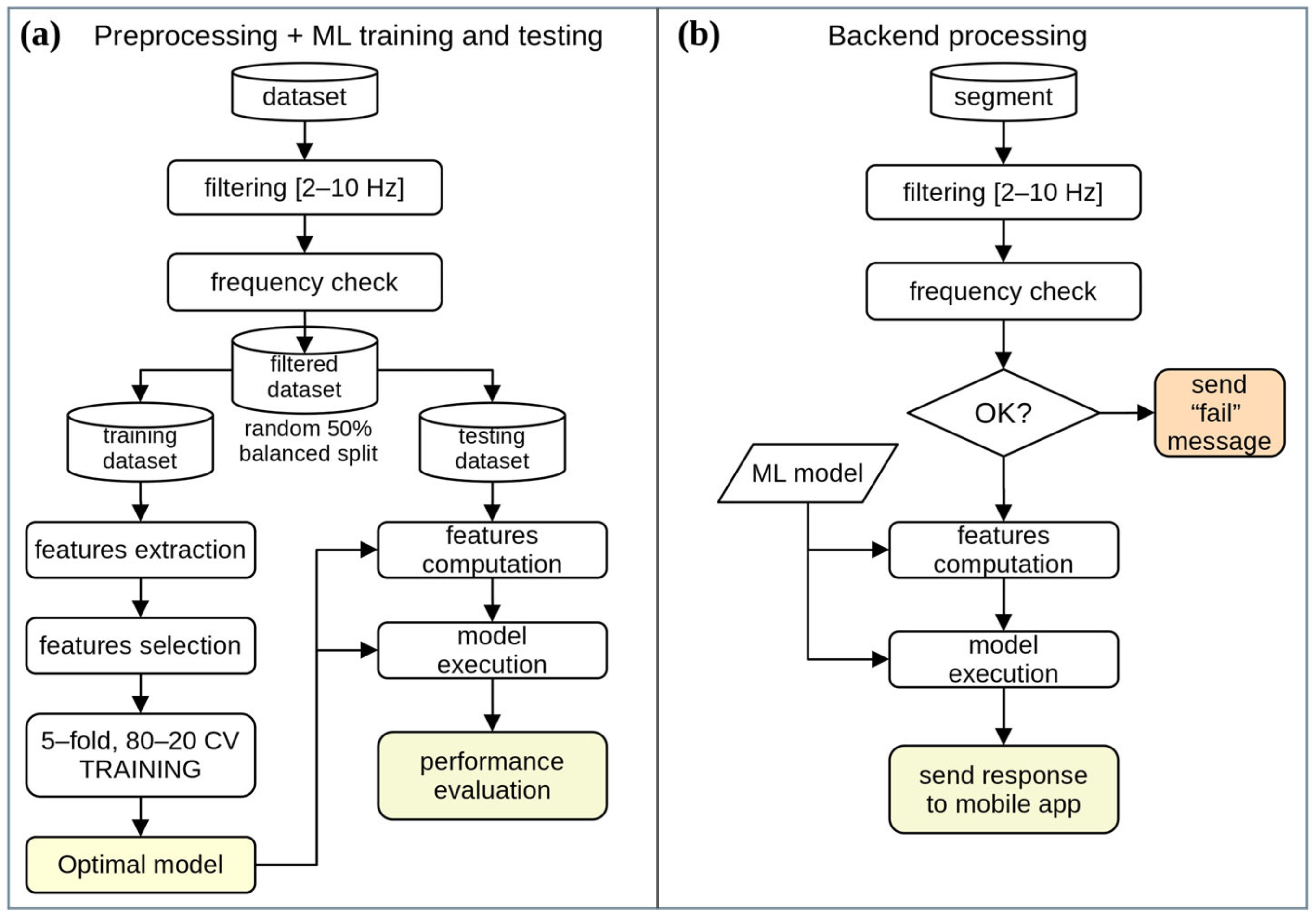
2.4. Machine Learning Algorithms
2.5. Backend Application
3. Results
4. Discussion
5. Conclusions
6. Patents
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Bhatia, K.P.; Bain, P.; Bajaj, N.; Elble, R.J.; Hallett, M.; Louis, E.D.; Raethjen, J.; Stamelou, M.; Testa, C.M.; Deuschl, G. Consensus Statement on the Classification of Tremors. From the Task Force on Tremor of the International Parkinson and Movement Disorder Society. Mov. Disord. 2018, 33, 75–87. [Google Scholar] [CrossRef] [PubMed]
- Postuma, R.B.; Berg, D.; Stern, M.; Poewe, W.; Olanow, C.W.; Oertel, W.; Obeso, J.; Marek, K.; Litvan, I.; Lang, A.E.; et al. MDS Clinical Diagnostic Criteria for Parkinson’s Disease. Mov. Disord. 2015, 30, 1591–1601. [Google Scholar] [CrossRef] [PubMed]
- Van De Wardt, J.; Van Der Stouwe, A.M.M.; DIrkx, M.; Elting, J.W.J.; Post, B.; Tijssen, M.A.J.; Helmich, R.C. Systematic Clinical Approach for Diagnosing Upper Limb Tremor. J. Neurol. Neurosurg. Psychiatry 2020, 91, 822–830. [Google Scholar] [CrossRef] [PubMed]
- Chen, W.; Hopfner, F.; Becktepe, J.S.; Deuschl, G. Rest Tremor Revisited: Parkinson’s Disease and Other Disorders. Transl. Neurodegener. 2017, 6, 16. [Google Scholar] [CrossRef]
- Vial, F.; Kassavetis, P.; Merchant, S.; Haubenberger, D.; Hallett, M. How to Do an Electrophysiological Study of Tremor. Clin. Neurophysiol. Pract. 2019, 4, 134–142. [Google Scholar] [CrossRef]
- Chen, K.-H.S.; Chen, R. Principles of Electrophysiological Assessments for Movement Disorders. J. Mov. Disord. 2020, 13, 27–38. [Google Scholar] [CrossRef]
- Quattrone, A.; Nisticò, R.; Morelli, M.; Arabia, G.; Crasà, M.; Vescio, B.; Mechelli, A.; Cascini, G.L.; Quattrone, A. Rest Tremor Pattern Predicts DaTscan (123I-Ioflupane) Result in Tremulous Disorders. Mov. Disord. 2021, 36, 2964–2966. [Google Scholar] [CrossRef]
- Milanov, I. Electromyographic Differentiation of Tremors. Clin. Neurophysiol. 2001, 112, 1626–1632. [Google Scholar] [CrossRef]
- Boose, A.; Jentgens, C.; Spieker, S.; Dichgans, J. Variations on Tremor Parameters. Chaos Interdiscip. J. Nonlinear Sci. 1995, 5, 52–56. [Google Scholar] [CrossRef]
- Vescio, B.; Nisticò, R.; Augimeri, A.; Quattrone, A.; Crasà, M.; Quattrone, A. Development and Validation of a New Wearable Mobile Device for the Automated Detection of Resting Tremor in Parkinson’s Disease and Essential Tremor. Diagnostics 2021, 11, 200. [Google Scholar] [CrossRef]
- Vescio, B.; Quattrone, A.; Nisticò, R.; Crasà, M.; Quattrone, A. Wearable Devices for Assessment of Tremor. Front. Neurol. 2021, 12, 680011. [Google Scholar] [CrossRef] [PubMed]
- Hadi, R.H.; Hady, H.N.; Hasan, A.M.; Al-Jodah, A.; Humaidi, A.J. Improved Fault Classification for Predictive Maintenance in Industrial IoT Based on AutoML: A Case Study of Ball-Bearing Faults. Processes 2023, 11, 1507. [Google Scholar] [CrossRef]
- De, A.; Bhatia, K.P.; Volkmann, J.; Peach, R.; Schreglmann, S.R. Machine Learning in Tremor Analysis: Critique and Directions. Mov. Disord. 2023, 38, 717–731. [Google Scholar] [CrossRef] [PubMed]
- Nisticò, R.; Quattrone, A.; Crasà, M.; De Maria, M.; Vescio, B.; Quattrone, A. Evaluation of Rest Tremor in Different Positions in Parkinson’s Disease and Essential Tremor plus. Neurol. Sci. 2022, 43, 3621–3627. [Google Scholar] [CrossRef]
- Nisticò, R.; Pirritano, D.; Salsone, M.; Novellino, F.; Del Giudice, F.; Morelli, M.; Trotta, M.; Bilotti, G.; Condino, F.; Cherubini, A.; et al. Synchronous Pattern Distinguishes Resting Tremor Associated with Essential Tremor from Rest Tremor of Parkinson’s Disease. Park. Relat. Disord. 2011, 17, 30–33. [Google Scholar] [CrossRef]
- Breiman, L. Random Forests. Mach. Learn. 2001, 45, 5–32. [Google Scholar] [CrossRef]
- Chen, T.; Guestrin, C. XGBoost. In Proceedings of the 22nd ACM SIGKDD International Conference on Knowledge Discovery and Data Mining, San Francisco, CA, USA, 13–17 August 2016; ACM: New York, NY, USA, 2016; pp. 785–794. [Google Scholar]
- Kuhn, M. Building Predictive Models in R Using the Caret Package. J. Stat. Softw. 2008, 28, 1–26. [Google Scholar] [CrossRef]
- De Araújo, A.C.A.; Santos, E.G.d.R.; de Sá, K.S.G.; Furtado, V.K.T.; Santos, F.A.; de Lima, R.C.; Krejcová, L.V.; Santos-Lobato, B.L.; Pinto, G.H.L.; Cabral, A.d.S.; et al. Hand Resting Tremor Assessment of Healthy and Patients with Parkinson’s Disease: An Exploratory Machine Learning Study. Front. Bioeng. Biotechnol. 2020, 8, 778. [Google Scholar] [CrossRef]
- Channa, A.; Ifrim, R.C.; Popescu, D.; Popescu, N. A-Wear Bracelet for Detection of Hand Tremor and Bradykinesia in Parkinson’s Patients. Sensors 2021, 21, 981. [Google Scholar] [CrossRef]
- Luft, F.; Sharifi, S.; Mugge, W.; Schouten, A.C.; Bour, L.J.; van Rootselaar, A.F.; Veltink, P.H.; Heida, T. A Power Spectral Density-Based Method to Detect Tremor and Tremor Intermittency in Movement Disorders. Sensors 2019, 19, 4301. [Google Scholar] [CrossRef]
- Yang, H.; Shen, Y.; Zhuang, W.; Gao, C.; Dai, D.; Zhang, W. A Smart Wearable Ring Device for Sensing Hand Tremor of Parkinson’s Patients. Comput. Model. Eng. Sci. 2021, 126, 1217–1238. [Google Scholar] [CrossRef]
- Kostikis, N.; Hristu-Varsakelis, D.; Arnaoutoglou, M.; Kotsavasiloglou, C. A Smartphone-Based Tool for Assessing Parkinsonian Hand Tremor. IEEE J. Biomed. Health Inform. 2015, 19, 1835–1842. [Google Scholar] [CrossRef] [PubMed]
- Peres, L.B.; Calil, B.C.; da Silva, A.P.S.P.B.; Dionísio, V.C.; Vieira, M.F.; de Oliveira Andrade, A.; Pereira, A.A. Discrimination between Healthy and Patients with Parkinson’s Disease from Hand Resting Activity Using Inertial Measurement Unit. Biomed. Eng. Online 2021, 20, 50. [Google Scholar] [CrossRef] [PubMed]
- LeMoyne, R.; Tomycz, N.; Mastroianni, T.; McCandless, C.; Cozza, M.; Peduto, D. Implementation of a Smartphone Wireless Accelerometer Platform for Establishing Deep Brain Stimulation Treatment Efficacy of Essential Tremor with Machine Learning. In Proceedings of the 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 25–29 August 2015; ISBN 9781424492701. [Google Scholar]
- McNames, J.; Shah, V.V.; Mancini, M.; Curtze, C.; El-Gohary, M.; Aboy, M.; Carlson-Kuhta, P.; Nutt, J.G.; Horak, F. A Two-Stage Tremor Detection Algorithm for Wearable Inertial Sensors During Normal Daily Activities. In Proceedings of the 2019 41st Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Berlin, Germany, 23–27 July 2019; pp. 2535–2538. [Google Scholar]
- San-Segundo, R.; Zhang, A.; Cebulla, A.; Panev, S.; Tabor, G.; Stebbins, K.; Massa, R.E.; Whitford, A.; de la Torre, F.; Hodgins, J. Parkinson’s Disease Tremor Detection in the Wild Using Wearable Accelerometers. Sensors 2020, 20, 5817. [Google Scholar] [CrossRef] [PubMed]
- Rovini, E.; Maremmani, C.; Cavallo, F. How Wearable Sensors Can Support Parkinson’s Disease Diagnosis and Treatment: A Systematic Review. Front. Neurosci. 2017, 11, 555. [Google Scholar] [CrossRef]
- Jeon, H.; Lee, W.; Park, H.; Lee, H.J.; Kim, S.K.; Kim, H.B.; Jeon, B.; Park, K.S. High-Accuracy Automatic Classification of Parkinsonian Tremor Severity Using Machine Learning Method. Physiol. Meas. 2017, 38, 1980–1999. [Google Scholar] [CrossRef]
- Ali, S.M.; Arjunan, S.P.; Peters, J.; Perju-Dumbrava, L.; Ding, C.; Eller, M.; Raghav, S.; Kempster, P.; Motin, M.A.; Radcliffe, P.J.; et al. Wearable Sensors during Drawing Tasks to Measure the Severity of Essential Tremor. Sci. Rep. 2022, 12, 5242. [Google Scholar] [CrossRef]
- Dai, H.; Zhang, P.; Lueth, T. Quantitative Assessment of Parkinsonian Tremor Based on an Inertial Measurement Unit. Sensors 2015, 15, 25055–25071. [Google Scholar] [CrossRef]
- Kim, H.B.; Lee, W.W.; Kim, A.; Lee, H.J.; Park, H.Y.; Jeon, H.S.; Kim, S.K.; Jeon, B.; Park, K.S. Wrist Sensor-Based Tremor Severity Quantification in Parkinson’s Disease Using Convolutional Neural Network. Comput. Biol. Med. 2018, 95, 140–146. [Google Scholar] [CrossRef]
- Sanchez-Perez, L.A.; Sanchez-Fernandez, L.P.; Shaout, A.; Martinez-Hernandez, J.M.; Alvarez-Noriega, M.J. Rest Tremor Quantification Based on Fuzzy Inference Systems and Wearable Sensors. Int. J. Med. Inform. 2018, 114, 6–17. [Google Scholar] [CrossRef]
- Heldman, D.A.; Jankovic, J.; Vaillancourt, D.E.; Prodoehl, J.; Elble, R.J.; Giuffrida, J.P. Essential Tremor Quantification during Activities of Daily Living. Parkinsonism Relat. Disord. 2011, 17, 537–542. [Google Scholar] [CrossRef] [PubMed]
- Hssayeni, M.D.; Jimenez-Shahed, J.; Burack, M.A.; Ghoraani, B. Wearable Sensors for Estimation of Parkinsonian Tremor Severity during Free Body Movements. Sensors 2019, 19, 4215. [Google Scholar] [CrossRef] [PubMed]
- Mahadevan, N.; Demanuele, C.; Zhang, H.; Volfson, D.; Ho, B.; Erb, M.K.; Patel, S. Development of Digital Biomarkers for Resting Tremor and Bradykinesia Using a Wrist-Worn Wearable Device. NPJ Digit. Med. 2020, 3, 5. [Google Scholar] [CrossRef] [PubMed]
- Rigas, G.; Tzallas, A.T.; Tsipouras, M.G.; Bougia, P.; Tripoliti, E.E.; Baga, D.; Fotiadis, D.I.; Tsouli, S.G.; Konitsiotis, S. Assessment of Tremor Activity in the Parkinsons Disease Using a Set of Wearable Sensors. IEEE Trans. Inf. Technol. Biomed. 2012, 16, 478–487. [Google Scholar] [CrossRef]
- Sigcha, L.; Pavón, I.; Costa, N.; Costa, S.; Gago, M.; Arezes, P.; López, J.M.; Arcas, G. De Automatic Resting Tremor Assessment in Parkinson’s Disease Using Smartwatches and Multitask Convolutional Neural Networks. Sensors 2021, 21, 291. [Google Scholar] [CrossRef]
- Zheng, X.; Campos, A.V.; Ordieres-Meré, J.; Balseiro, J.; Marcos, S.L.; Aladro, Y. Continuous Monitoring of Essential Tremor Using a Portable System Based on Smartwatch. Front. Neurol. 2017, 8, 96. [Google Scholar] [CrossRef]
- Di Biase, L.; Brittain, J.-S.; Shah, S.A.; Pedrosa, D.J.; Cagnan, H.; Mathy, A.; Chen, C.C.; Martín-Rodríguez, J.F.; Mir, P.; Timmerman, L.; et al. Tremor Stability Index: A New Tool for Differential Diagnosis in Tremor Syndromes. Brain 2017, 140, 1977–1986. [Google Scholar] [CrossRef]
- Wile, D.J.; Ranawaya, R.; Kiss, Z.H.T. Smart Watch Accelerometry for Analysis and Diagnosis of Tremor. J. Neurosci. Methods 2014, 230, 1–4. [Google Scholar] [CrossRef]
- Surangsrirat, D.; Thanawattano, C.; Pongthornseri, R.; Dumnin, S.; Anan, C.; Bhidayasiri, R. Support Vector Machine Classification of Parkinson’s Disease and Essential Tremor Subjects Based on Temporal Fluctuation. In Proceedings of the 2016 38th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Orlando, FL, USA, 16–20 August 2016; pp. 6389–6392. [Google Scholar]
- Duque, J.D.L.; Egea, A.J.S.; Reeb, T.; Rojas, H.A.G.; González-Vargas, A.M. Angular Velocity Analysis Boosted by Machine Learning for Helping in the Differential Diagnosis of Parkinson’s Disease and Essential Tremor. IEEE Access 2020, 8, 88866–88875. [Google Scholar] [CrossRef]
- Hossen, A.; Muthuraman, M.; Al-Hakim, Z.; Raethjen, J.; Deuschl, G.; Heute, U. Discrimination of Parkinsonian Tremor from Essential Tremor Using Statistical Signal Characterization of the Spectrum of Accelerometer Signal. Biomed. Mater. Eng. 2013, 23, 513–531. [Google Scholar] [CrossRef]
- Locatelli, P.; Alimonti, D. Differentiating Essential Tremor and Parkinson’s Disease Using a Wearable Sensor—A Pilot Study. In Proceedings of the 2017 7th IEEE International Workshop on Advances in Sensors and Interfaces (IWASI), Vieste, Italy, 15–16 June 2017; pp. 213–218. [Google Scholar]
- Barrantes, S.; Sánchez Egea, A.J.; González Rojas, H.A.; Martí, M.J.; Compta, Y.; Valldeoriola, F.; Mezquita, E.S.; Tolosa, E.; Valls-Solè, J. Differential Diagnosis between Parkinson’s Disease and Essential Tremor Using the Smartphone’s Accelerometer. PLoS ONE 2017, 12, e0183843. [Google Scholar] [CrossRef] [PubMed]
- Muthuraman, M.; Hossen, A.; Heute, U.; Deuschl, G.; Raethjen, J. A New Diagnostic Test to Distinguish Tremulous Parkinson’s Disease from Advanced Essential Tremor. Mov. Disord. 2011, 26, 1548–1552. [Google Scholar] [CrossRef] [PubMed]
- Balachandar, A.; Algarni, M.; Oliveira, L.; Marsili, L.; Merola, A.; Sturchio, A.; Espay, A.J.; Hutchison, W.D.; Balasubramaniam, A.; Rudzicz, F.; et al. Are Smartphones and Machine Learning Enough to Diagnose Tremor? J. Neurol. 2022, 269, 6104–6115. [Google Scholar] [CrossRef] [PubMed]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Model | Hyperparameters | Definition |
|---|---|---|
| RF | Mtry = 1 | Number of variables randomly sampled as candidates at each split |
| XGBoost | Nrounds = 300 Max.depth = 4 Eta = 0.05 Gamma = 0.0 Col.sample_by_tree = 0.4 Child_weight = 1 Subsample = 0.75 | Maximum number of iterations/trees to grow Depth of the tree Learning rate Regularisation (preventing overfitting) Controls the number of features supplied to a tree Leaf threshold for stopping tree splitting Controls the number of samples supplied to a tree |
| Features | |||||
|---|---|---|---|---|---|
| Description | Synchronous Pattern | Alternating Pattern | p-Value | ||
| ay-az cross-spectral frequency (Hz) | 5.63 ± 0.69 | 4.96 ± 0.65 | <0.001 | # | |
| ay-az cross-spectral amplitude (m2/s4/Hz) | 0.38 ± 1.03 | 10.70 ± 18.32 | <0.001 | # | |
| wx spectral amplitude ((°/s)2/Hz) | 338 ± 1619 | 13656 ± 23240 | <0.001 | # | |
| ay-az magnitude squared coherence | 0.81 ± 0.27 | 0.96 ± 0.09 | <0.001 | # | |
| ay-az axes correlation | 0.55 ± 0.64 | 0.93 ± 0.15 | <0.001 | # | |
| ay-az phase difference (°) | 45.35 ± 54.50 | 11.84 ± 17.36 | <0.001 | # | |
| 3 dB power, ay-az cross-spectrum (m2/s4) | 0.18 ± 0.49 | 4.80 ± 8.34 | <0.001 | # | |
| 3 dB powers (m2/s4) | wx | 156 ± 693 | 6144 ± 10628 | <0.001 | # |
| ay | 0.26 ± 0.91 | 4.95 ± 9.04 | <0.001 | # | |
| az | 0.14 ± 0.30 | 6.18 ± 11.81 | <0.001 | # | |
| 3 dB bandwidth, ay-az cross-spectrum (Hz) | 0.65 ± 0.24 | 0.57 ± 0.09 | 0.016 | # | |
| 3 dB bandwidths (Hz) | wx | 0.74 ± 0.33 | 0.58 ± 0.14 | 0.001 | # |
| ay | 0.72 ± 0.29 | 0.59 ± 0.14 | 0.001 | # | |
| az | 0.68 ± 0.26 | 0.57 ± 0.08 | 0.003 | # | |
| y,z spectral amplitudes (m2/s4/Hz) | ay | 0.39 ± 0.73 | 2.46 ± 2.45 | <0.001 | # |
| az | 0.36 ± 0.52 | 2.88 ± 2.83 | <0.001 | # | |
| Mean 1 s coherence, ay-az cross spectrum | 0.71 ± 0.07 | 0.75 ± 0.04 | <0.001 | # | |
| Mean 1 s coherence, wx spectrum | 0.72 ± 0.05 | 0.76 ± 0.02 | <0.001 | # | |
| Var. 1 s coherence, y-z cross spectrum | 0.04 ± 0.05 | 0.01 ± 0.02 | <0.001 | # | |
| Var. 1 s coherence, wx spectrum | 0.04 ± 0.03 | 0.01 ± 0.02 | <0.001 | # | |
| Skew. 1 s coherence, ay-az cross spectrum | −0.47 ± 0.74 | −0.37 ± 0.72 | 0.582 | # | |
| Skew. 1 s coherence, wx spectrum | −0.38 ± 0.72 | −0.32 ± 0.71 | 0.631 | * | |
| Kurt. 1 s coherence, ay-az cross spectrum | 2.46 ± 1.00 | 2.46 ± 1.01 | 0.962 | # | |
| Kurt. 1 s coherence, wx spectrum | 2.48 ± 1.06 | 2.40 ± 0.80 | 0.881 | # | |
| Single-axis frequencies (Hz) | ax | 5.52 ± 0.84 | 4.97 ± 0.73 | <0.001 | # |
| ay | 5.63 ± 0.71 | 4.96 ± 0.65 | <0.001 | # | |
| az | 5.61 ± 0.65 | 4.95 ± 0.65 | <0.001 | # | |
| wx | 5.57 ± 0.78 | 4.91 ± 0.63 | <0.001 | # | |
| wy | 5.51 ± 0.86 | 4.97 ± 0.81 | <0.001 | # | |
| wz | 5.63 ± 0.66 | 4.98 ± 0.73 | <0.001 | # | |
| Single-axis accelerometer peak-to-peak amplitudes (mG) | ax | 93.38 ± 149.64 | 355.73 ± 349.61 | <0.001 | # |
| ay | 85.64 ± 132.39 | 521.64 ± 517.66 | <0.001 | # | |
| az | 77.69 ± 90.18 | 594.47 ± 562.86 | <0.001 | # | |
| Vectorial magnitude of peak-to-peak accelerometer amplitudes (mG) | 157.76 ± 212.64 | 919.24 ± 782.95 | <0.001 | # | |
| Single-axis gyroscope peak-to-peak amplitudes (°/s) | wx | 17.54 ± 32.72 | 180.59 ± 174.16 | <0.001 | # |
| wy | 26.43 ± 56.13 | 76.24 ± 81.57 | <0.001 | # | |
| wz | 31.97 ± 66.05 | 84.77 ± 82.09 | <0.001 | # | |
| Vectorial magnitude of peak-to-peak gyroscope amplitudes (°/s) | 49.07 ± 90.55 | 224.69 ± 196.97 | <0.001 | # | |
| Sum of first 2 harmonics on axis az (m2/s4/Hz) | 0.12 ± 0.26 | 5.66 ± 10.58 | <0.001 | # | |
| ax, wavelet approx. coefficient (m/s2) | a3 | 7.17 ± 3.36 | 9.61 ± 5.08 | 0.004 | # |
| ax, wavelet detail coefficients (m/s2) | d3 | 0.62 ± 0.82 | 2.39 ± 2.04 | <0.001 | # |
| d2 | 0.24 ± 0.24 | 1.04 ± 1.02 | <0.001 | # | |
| d1 | 0.10 ± 0.09 | 0.46 ± 0.57 | <0.001 | # | |
| ay, wavelet approx. coefficient (m/s2) | a3 | 24.54 ± 2.62 | 22.90 ± 5.54 | 0.158 | # |
| ay, wavelet detail coefficients (m/s2) | d3 | 0.83 ± 0.79 | 3.11 ± 2.44 | <0.001 | # |
| d2 | 0.48 ± 0.27 | 1.10 ± 0.96 | <0.001 | # | |
| d1 | 0.26 ± 0.13 | 0.45 ± 0.42 | 0.001 | # | |
| az, wavelet approx. coefficient (m/s2) | a3 | 7.92 ± 5.13 | 12.83 ± 6.32 | <0.001 | # |
| az, wavelet detail coefficients (m/s2) | d3 | 0.58 ± 0.55 | 3.55 ± 2.91 | <0.001 | # |
| d2 | 0.22 ± 0.16 | 1.27 ± 1.27 | <0.001 | # | |
| d1 | 0.10 ± 0.07 | 0.52 ± 0.75 | <0.001 | # | |
| wx, wavelet approx. coefficient (°/s) | a3 | 19.61 ± 30.67 | 162.47 ± 149.40 | <0.001 | # |
| wx, wavelet detail coefficients (°/s) | d3 | 12.11 ± 19.61 | 100.66 ± 92.52 | <0.001 | # |
| d2 | 3.65 ± 6.04 | 29.83 ± 33.77 | <0.001 | # | |
| d1 | 1.16 ± 2.34 | 8.61 ± 12.26 | <0.001 | # | |
| wy, wavelet approx. coefficient (°/s) | a3 | 31.61 ± 40.73 | 76.36 ± 77.29 | <0.001 | # |
| wy, wavelet detail coefficients (°/s) | d3 | 17.28 ± 33.33 | 52.65 ± 51.71 | <0.001 | # |
| d2 | 5.14 ± 8.72 | 20.67 ± 23.12 | <0.001 | # | |
| d1 | 1.32 ± 2.13 | 7.20 ± 9.89 | <0.001 | # | |
| wz, wavelet approx. coefficient (°/s) | a3 | 28.76 ± 48.37 | 80.76 ± 75.45 | <0.001 | # |
| wz, wavelet detail coefficients (°/s) | d3 | 20.86 ± 41.14 | 51.00 ± 44.17 | <0.001 | # |
| d2 | 5.55 ± 10.08 | 15.75 ± 13.79 | <0.001 | # | |
| d1 | 1.30 ± 2.30 | 4.73 ± 5.17 | <0.001 | # |
| Model | Metric | Training | Testing |
|---|---|---|---|
| Random Forest | accuracy | 0.88 (0.87–0.90) | 0.92 (0.83–0.97) |
| kappa | 0.76 | 0.83 | |
| sensitivity | 0.89 | 0.96 | |
| specificity | 0.88 | 0.87 | |
| ppv | 0.89 | 0.90 | |
| npv | 0.87 | 0.94 | |
| XGBoost | accuracy | 0.89 (0.86–0.92) | 0.89 (0.80–0.95) |
| kappa | 0.79 | 0.78 | |
| sensitivity | 0.89 | 0.96 | |
| specificity | 0.90 | 0.82 | |
| ppv | 0.91 | 0.86 | |
| npv | 0.88 | 0.94 |
| Model | Fold | Accuracy | Kappa | Sensitivity | Specificity |
|---|---|---|---|---|---|
| Random forest | 1 | 0.94 | 0.88 | 0.90 | 1.00 |
| 2 | 0.82 | 0.65 | 0.78 | 0.88 | |
| 3 | 0.87 | 0.73 | 1.00 | 0.72 | |
| 4 | 0.91 | 0.82 | 1.00 | 0.81 | |
| 5 | 0.87 | 0.74 | 0.78 | 0.97 | |
| 6 | 0.91 | 0.82 | 0.89 | 0.94 | |
| 7 | 0.85 | 0.69 | 0.90 | 0.79 | |
| 8 | 0.71 | 0.41 | 0.67 | 0.75 | |
| 9 | 0.97 | 0.94 | 1.00 | 0.94 | |
| 10 | 0.91 | 0.82 | 1.00 | 0.81 | |
| 11 | 0.82 | 0.64 | 0.89 | 0.75 | |
| 12 | 0.97 | 0.94 | 1.00 | 0.94 | |
| 13 | 0.91 | 0.82 | 0.85 | 1.00 | |
| 14 | 0.76 | 0.53 | 0.67 | 0.88 | |
| 15 | 0.94 | 0.88 | 1.00 | 0.88 | |
| 16 | 0.91 | 0.82 | 0.85 | 1.00 | |
| 17 | 0.76 | 0.52 | 0.89 | 0.63 | |
| 18 | 0.90 | 0.79 | 0.92 | 0.88 | |
| 19 | 1.00 | 1.00 | 1.00 | 1.00 | |
| 20 | 0.84 | 0.68 | 0.78 | 0.91 | |
| 21 | 0.84 | 0.67 | 0.83 | 0.86 | |
| 22 | 0.85 | 0.71 | 0.83 | 0.88 | |
| 23 | 0.94 | 0.88 | 1.00 | 0.88 | |
| 24 | 0.94 | 0.88 | 0.89 | 1.00 | |
| 25 | 0.88 | 0.76 | 0.89 | 0.88 | |
| mean | 0.88 | 0.76 | 0.89 | 0.88 | |
| std. dev. | 0.07 | 0.14 | 0.10 | 0.10 | |
| XGBoost | 1 | 0.91 | 0.82 | 0.97 | 0.84 |
| 2 | 0.90 | 0.79 | 0.86 | 0.94 | |
| 3 | 0.90 | 0.79 | 0.87 | 0.93 | |
| 4 | 0.88 | 0.76 | 0.87 | 0.90 | |
| 5 | 0.90 | 0.80 | 0.84 | 0.97 | |
| 6 | 0.96 | 0.91 | 0.95 | 0.97 | |
| 7 | 0.88 | 0.76 | 0.86 | 0.91 | |
| 8 | 0.90 | 0.79 | 0.89 | 0.90 | |
| 9 | 0.90 | 0.79 | 0.89 | 0.90 | |
| 10 | 0.90 | 0.79 | 0.89 | 0.90 | |
| 11 | 0.91 | 0.82 | 0.89 | 0.94 | |
| 12 | 0.90 | 0.79 | 0.86 | 0.94 | |
| 13 | 0.87 | 0.73 | 0.86 | 0.88 | |
| 14 | 0.84 | 0.67 | 0.84 | 0.84 | |
| 15 | 0.87 | 0.73 | 0.86 | 0.87 | |
| 16 | 0.88 | 0.76 | 0.86 | 0.90 | |
| 17 | 0.90 | 0.79 | 0.86 | 0.94 | |
| 18 | 0.90 | 0.79 | 0.89 | 0.91 | |
| 19 | 0.90 | 0.79 | 0.92 | 0.87 | |
| 20 | 0.90 | 0.79 | 0.92 | 0.87 | |
| 21 | 0.93 | 0.85 | 0.95 | 0.90 | |
| 22 | 0.90 | 0.79 | 0.89 | 0.90 | |
| 23 | 0.90 | 0.80 | 0.89 | 0.92 | |
| 24 | 0.88 | 0.76 | 0.89 | 0.88 | |
| 25 | 0.76 | 0.53 | 0.78 | 0.75 | |
| mean | 0.89 | 0.78 | 0.88 | 0.90 | |
| std. dev. | 0.03 | 0.07 | 0.04 | 0.05 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Vescio, B.; De Maria, M.; Crasà, M.; Nisticò, R.; Calomino, C.; Aracri, F.; Quattrone, A.; Quattrone, A. Development of a New Wearable Device for the Characterization of Hand Tremor. Bioengineering 2023, 10, 1025. https://doi.org/10.3390/bioengineering10091025
Vescio B, De Maria M, Crasà M, Nisticò R, Calomino C, Aracri F, Quattrone A, Quattrone A. Development of a New Wearable Device for the Characterization of Hand Tremor. Bioengineering. 2023; 10(9):1025. https://doi.org/10.3390/bioengineering10091025
Chicago/Turabian StyleVescio, Basilio, Marida De Maria, Marianna Crasà, Rita Nisticò, Camilla Calomino, Federica Aracri, Aldo Quattrone, and Andrea Quattrone. 2023. "Development of a New Wearable Device for the Characterization of Hand Tremor" Bioengineering 10, no. 9: 1025. https://doi.org/10.3390/bioengineering10091025