


Empowering Hand Rehabilitation with AI-Powered Gesture Recognition: A Study of an sEMG-Based System
 , , ,
, , , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. Materials and Methods
2.1. Related Work
2.1.1. Hand Design and Actuation
2.1.2. Recognition Methods of the sEMG Signals
2.2. Design and Manufacture of the Hand Robot
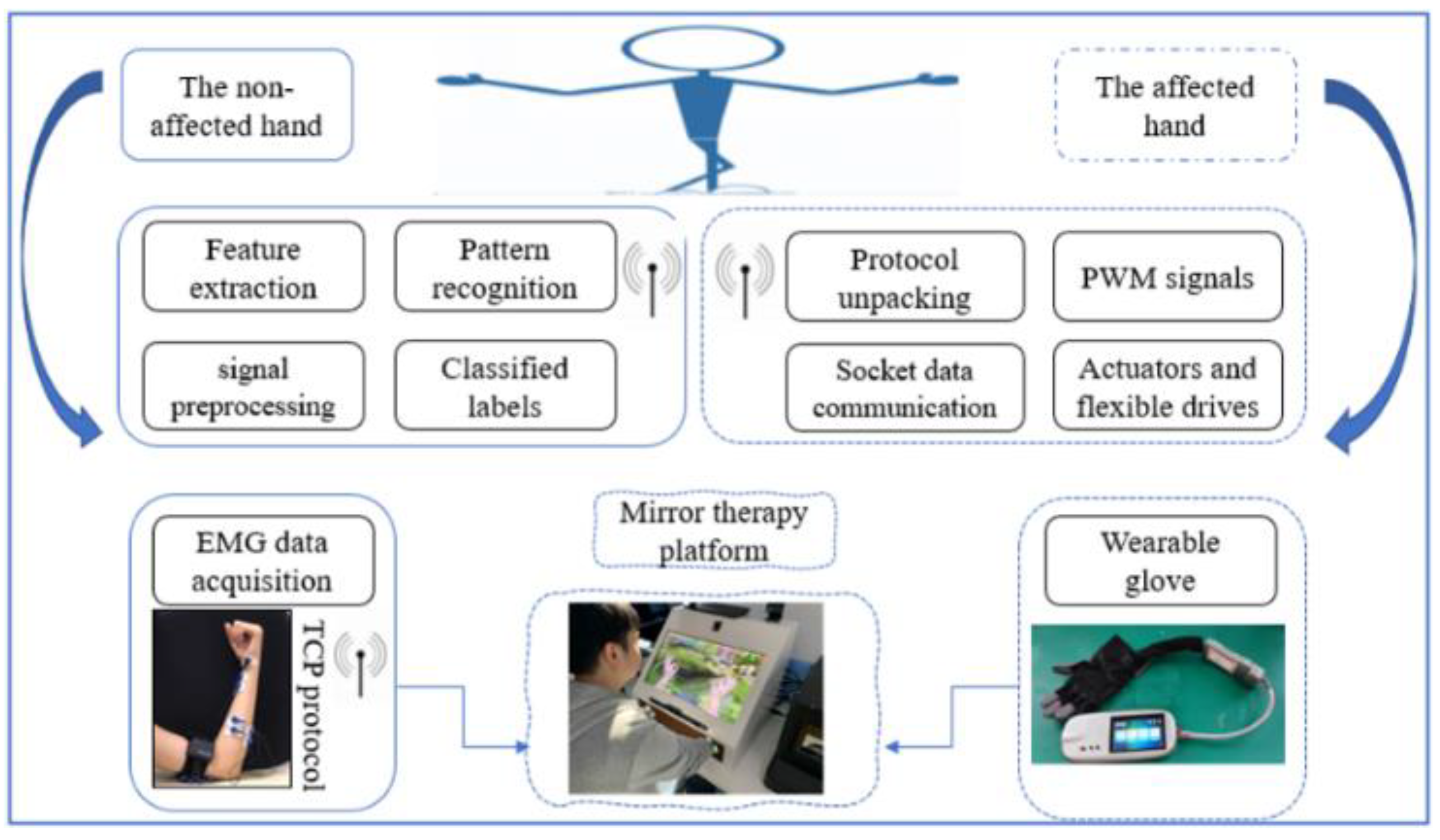
2.2.1. Host Machine for the Hand Rehabilitation Robot
2.2.2. Glove and Finger Structure
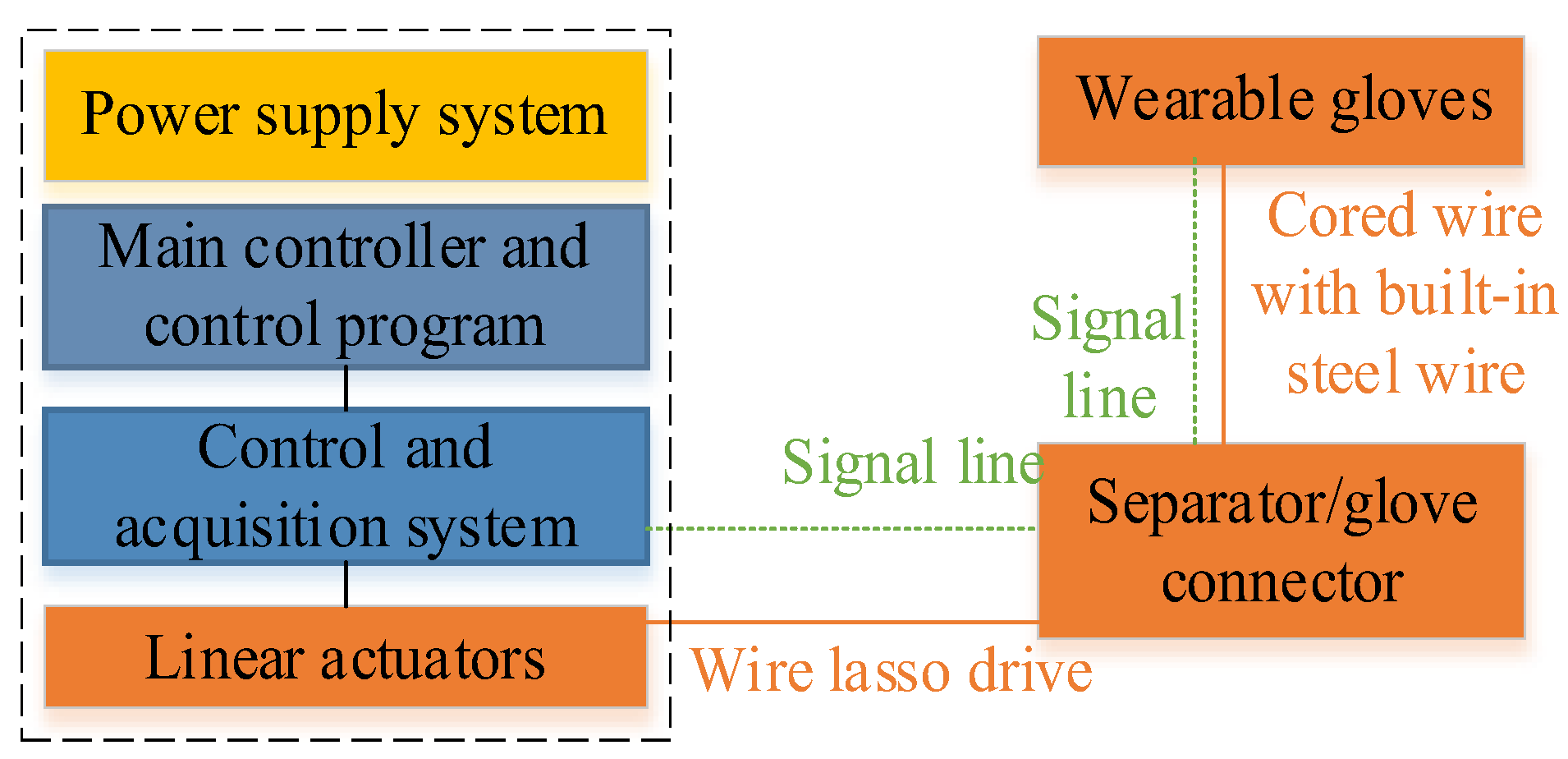
2.2.3. Driving System with Linear Actuator and Flexible Lasso
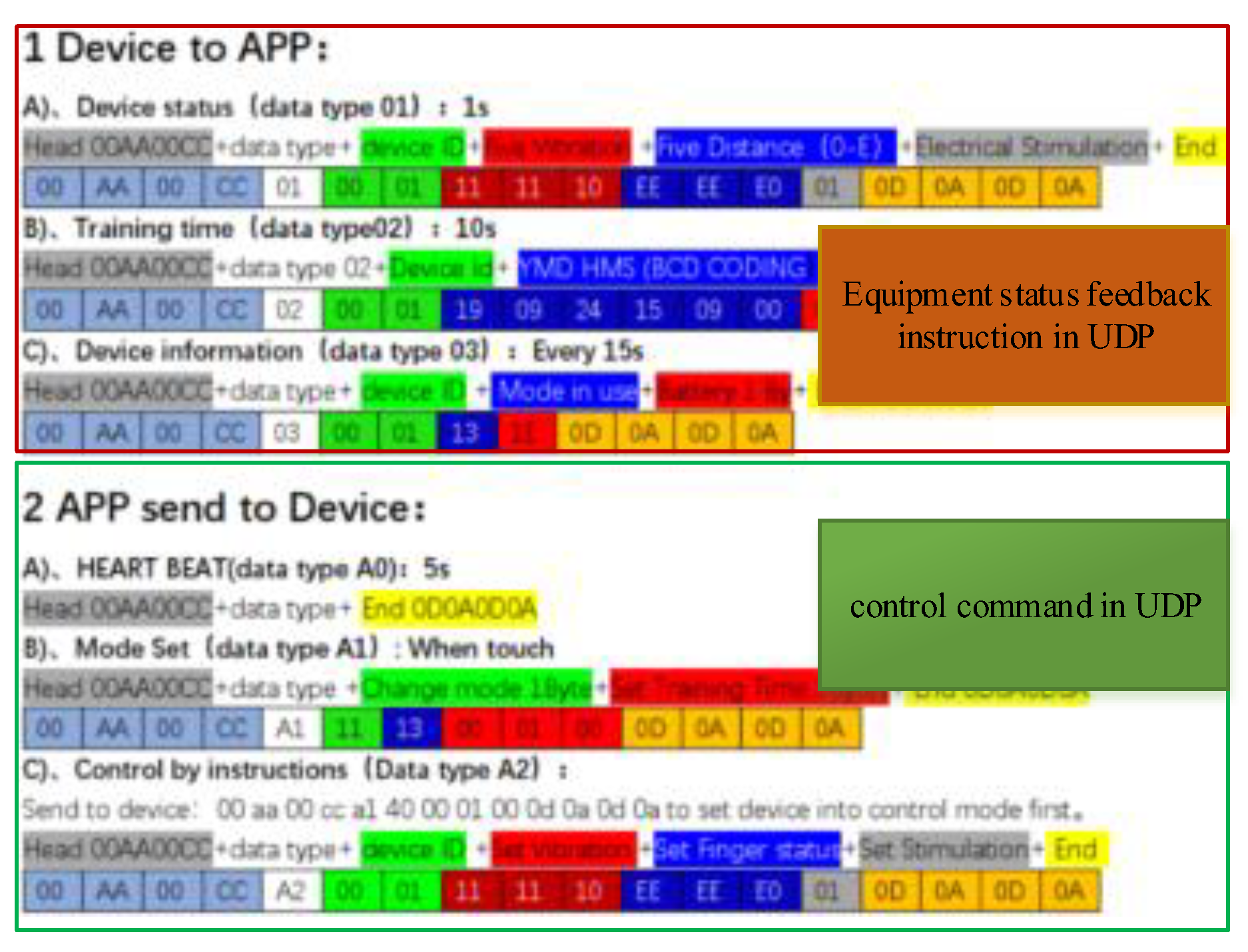
2.2.4. Control Protocol of the Hand Robot




2.3. Research on Gesture Recognition Algorithms
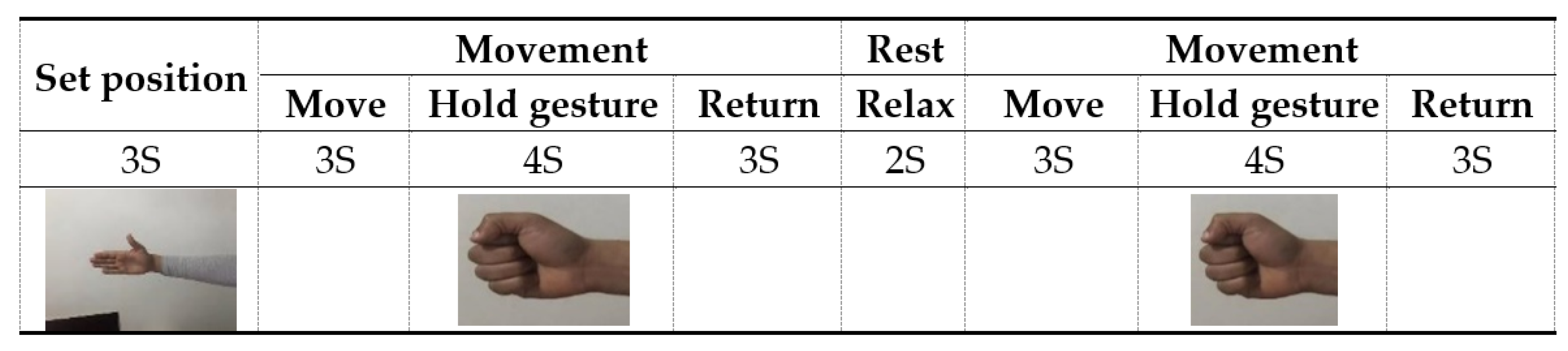
2.3.1. Gestures and Device Settings
2.3.2. Data Preprocessing and Feature Extraction
3. Results
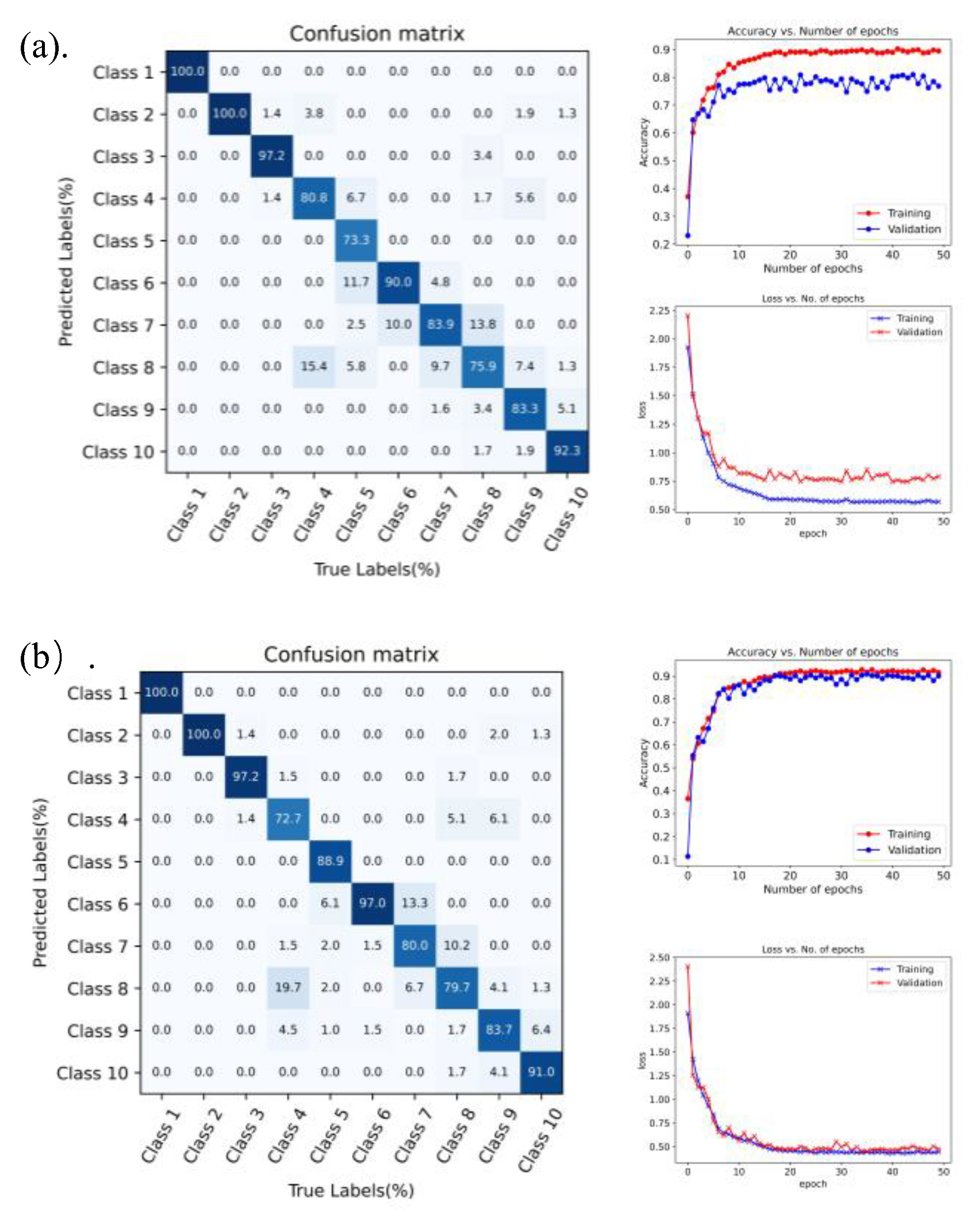
3.1. Accuracy of Gesture Recognition
3.2. Control of the Hand Rehabilitation Robot Based on sEMG
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Wang, Y.; Xu, Q. Design and testing of a soft parallel robot based on pneumatic artificial muscles for wrist rehabilitation. Sci. Rep. 2021, 11, 1273. [Google Scholar] [CrossRef] [PubMed]
- Moin, A.; Zhou, A.; Rahimi, A.; Menon, A.; Benatti, S.; Alexandrov, G.; Tamakloe, S.; Ting, J.; Yamamoto, N.; Khan, Y.; et al. A wearable biosensing system with in-sensor adaptive machine learning for hand gesture recognition. Nat. Electron. 2021, 4, 54–63. [Google Scholar] [CrossRef]
- Orban, M.; Zhang, X.; Lu, Z.; Marcal, A.; Emad, A.; Masengo, G. Precise Control Method on Prosthetic Hand Using sEMG Signals. In Proceedings of the 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Auto-Mation, Control, and Intelligent Systems (CYBER), Xi’an, China, 10–13 October 2020; pp. 326–331. [Google Scholar]
- Tsai, Y.L.; Huang, J.J.; Pu, S.W.; Chen, H.P.; Hsu, S.C.; Chang, J.Y.; Pei, Y.C. Usability Assessment of a Cable-Driven Exoskeletal Robot for Hand Rehabilitation. Front. Neurorobotics 2019, 13, 3. [Google Scholar] [CrossRef] [PubMed]
- Orban, M.; Elsamanty, M.; Guo, K.; Zhang, S.; Yang, H. A Review of Brain Activity and EEG-Based Brain–Computer Interfaces for Rehabilitation Application. Bioengineering 2022, 9, 768. [Google Scholar] [CrossRef]
- Torrisi, M.; Maggio, M.G.; De Cola, M.C.; Zichittella, C.; Carmela, C.; Porcari, B.; la Rosa, G.; De Luca, R.; Naro, A.; Calabrò, R.S. Beyond motor recovery after stroke: The role of hand robotic rehabilitation plus virtual reality in improving cognitive function. J. Clin. Neurosci. 2021, 92, 11–16. [Google Scholar] [CrossRef]
- Zanatta, F.; Giardini, A.; Pierobon, A.; D’Addario, M.; Steca, P. A systematic review on the usability of robotic and virtual reality devices in neuromotor rehabilitation: Patients’ and healthcare professionals’ perspective. BMC Health Serv. Res. 2022, 22, 523. [Google Scholar] [CrossRef]
- Pu, S.W.; Pei, Y.C.; Chang, J.Y. Decoupling finger joint motion in an exoskeletal hand: A design for robot-assisted rehabilitation. IEEE Trans. Ind. Electron. 2019, 67, 686–697. [Google Scholar] [CrossRef]
- Shanmuganathan, V.; Yesudhas, H.R.; Khan, M.S.; Gandomi, A. R-CNN and wavelet feature extraction for hand gesture recognition with EMG signals. Neural Comput. Appl. 2020, 32, 16723–16736. [Google Scholar] [CrossRef]
- Bouteraa, Y.; Abdallah, I.B.; Elmogy, A.M. Training of hand rehabilitation using low cost exoskeleton and vision-based game interface. J. Intell. Robot. Syst. 2019, 96, 31–47. [Google Scholar] [CrossRef]
- Chowdhury, A.; Raza, H.; Meena, Y.K.; Dutta, A.; Prasad, G. An EEG-EMG correlation-based brain-computer interface for hand orthosis supported neuro-rehabilitation. J. Neurosci. Methods 2019, 312, 1–11. [Google Scholar] [CrossRef]
- Huang, Y.; Lai, W.P.; Qian, Q.; Hu, X.; Tam, E.W.; Zheng, Y. Translation of robot-assisted rehabilitation to clinical service: A comparison of the rehabilitation effectiveness of EMG-driven robot hand assisted upper limb training in practical clinical service and in clinical trial with laboratory configuration for chronic stroke. Biomed. Eng. Online 2018, 17, 91. [Google Scholar]
- Randazzo, L.; Iturrate, I.; Perdikis, S.; Millan, J.D.R. mano: A Wearable Hand Exoskeleton for Activities of Daily Living and Neurorehabilitation. IEEE Robot. Autom. Lett. 2018, 3, 500–507. [Google Scholar] [CrossRef]
- Bützer, T.; Lambercy, O.; Arata, J.; Gassert, R. Fully Wearable Actuated Soft Exoskeleton for Grasping Assistance in Everyday Activities. Soft Robot. 2021, 8, 128–143. [Google Scholar] [CrossRef] [PubMed]
- Sierotowicz, M.; Lotti, N.; Nell, L.; Missiroli, F.; Alicea, R.; Zhang, X.; Xiloyannis, M.; Rupp, R.; Papp, E.; Krzywinski, J.; et al. EMG-Driven Machine Learning Control of a Soft Glove for Grasping Assistance and Rehabilitation. IEEE Robot. Autom. Lett. 2022, 7, 1566–1573. [Google Scholar] [CrossRef]
- Turolla, A.; Albasini, O.A.D.; Oboe, R.; Agostini, M.; Tonin, P.; Paolucci, S.; Sandrini, G.; Venneri, A.; Piron, L. Haptic-Based Neurorehabilitation in Poststroke Patients: A Feasibility Prospective Multicentre Trial for Robotics Hand Rehabilitation. Comput. Math. Methods Med. 2013, 2013, 895492. [Google Scholar] [CrossRef]
- George, J.A.; Kluger, D.T.; Davis, T.S.; Wendelken, S.M.; Okorokova, E.V.; He, Q.; Duncan, C.C.; Hutchinson, D.T.; Thumser, Z.C.; Beckler, D.T.; et al. Biomimetic sensory feedback through peripheral nerve stimulation improves dexterous use of a bionic hand. Sci. Robot. 2019, 4, eaax2352. [Google Scholar] [CrossRef] [PubMed]
- Laffranchi, M.; Boccardo, N.; Traverso, S.; Lombardi, L.; Canepa, M.; Lince, A.; Semprini, M.; Saglia, J.A.; Naceri, A.; Sacchetti, R.; et al. The Hannes hand prosthesis replicates the key biological properties of the human hand. Sci. Robot. 2020, 5, eabb0467. [Google Scholar] [CrossRef]
- Furui, A.; Eto, S.; Nakagaki, K.; Shimada, K.; Nakamura, G.; Masuda, A.; Chin, T.; Tsuji, T. A myoelectric prosthetic hand with muscle synergy–based motion determination and impedance model–based biomimetic control. Sci. Robot. 2019, 4, eaaw6339. [Google Scholar] [CrossRef]
- D’Anna, E.; Valle, G.; Mazzoni, A.; Strauss, I.; Iberite, F.; Patton, J.; Petrini, F.M.; Raspopovic, S.; Granata, G.; Di Iorio, R.; et al. A closed-loop hand prosthesis with simultaneous intraneural tactile and position feedback. Sci. Robot. 2019, 4, eaau8892. [Google Scholar] [CrossRef]
- Veer, K. Flexible Approach for Classifying EMG Signals for Rehabilitation Applications. Neurophysiology 2020, 52, 60–66. [Google Scholar] [CrossRef]
- Schwartz, C.; Wang, F.C.; Forthomme, B.; Denoël, V.; Brüls, O.; Croisier, J.L. Normalizing gastrocnemius muscle EMG signal: An optimal set of maximum voluntary isometric contraction tests for young adults considering reproducibility. Gait Posture 2020, 82, 196–202. [Google Scholar] [CrossRef] [PubMed]
- Sui, X.; Wan, K.; Yang, Z. Pattern recognition of SEMG based on wavelet packet transform and improved SVM. Optik 2019, 176, 228–235. [Google Scholar] [CrossRef]
- Tepe, C.; Demir, M.C. The effects of the number of channels and gyroscopic data on the classification performance in EMG data acquired by Myo armband. J. Comput. Sci. 2021, 51, 101348. [Google Scholar] [CrossRef]
- Pancholi, S.; Joshi, A.M. Advanced Energy Kernel-Based Feature Extraction Scheme for Improved EMG-PR-Based Prosthesis Control against Force Variation. IEEE Trans. Cybern. 2020, 52, 3819–3828. [Google Scholar] [CrossRef] [PubMed]
- Gandolla, M.; Ferrante, S.; Ferrigno, G.; Baldassini, D.; Molteni, F.; Guanziroli, E.; Cotti Cottini, M.; Seneci, C.; Pedrocchi, A. Artificial neural network EMG classifier for functional hand grasp movements prediction. J. Int. Med. Res. 2017, 45, 1831–1847. [Google Scholar] [CrossRef]
- Xiong, P.; Wu, C.; Zhou, H.; Song, A.; Hu, L.; Liu, X.P. design of an accurate end-of-arm force display system based on wearable arm gesture sensors and EMG sensors. Inf. Fusion 2017, 39, 178–185. [Google Scholar] [CrossRef]
- Zhang, L.; Qi, W.; Hu, Y.; Chen, Y. Disturbance-Observer-Based Fuzzy Control for a Robot Manipulator Using an EMG-Driven Neuromusculoskeletal Model. Complexity 2020, 2020, 8814460. [Google Scholar] [CrossRef]
- Li, Y.; Zhang, Q.; Zeng, N.; Chen, J.; Zhang, Q. Discrete Hand Motion Intention Decoding Based on Transient Myoelectric Signals. IEEE Access 2019, 7, 81630–81639. [Google Scholar] [CrossRef]
- Naik, G.; Kumar, D. Hybrid Feature Selection for Myoelectric Signal Classification Using MICA. J. Electr. Eng. 2010, 61, 93–99. [Google Scholar] [CrossRef]
- Schabron, B.; Desai, J.; Yihun, Y. Wheelchair-Mounted Upper Limb Robotic Exoskeleton with Adaptive Controller for Activities of Daily Living. Sensors 2021, 21, 5738. [Google Scholar] [CrossRef]
- Guo, K.; Orban, M.; Yang, H.; Li, Z. Research on rope-driven flexible robot for hand rehabilitation and experimental study based on EEG signals. J. Mech. Med. Biol. 2022, 22, 2240043. [Google Scholar] [CrossRef]
- Yu, Z.; Zhao, J.; Wang, Y.; He, L.; Wang, S. Surface EMG-Based Instantaneous Hand Gesture Recognition Using Convolutional Neural Network with the Transfer Learning Method. Sensors 2021, 21, 2540. [Google Scholar] [CrossRef] [PubMed]
- Orban, M.; Zhang, X.; Lu, Z.; Zhang, Y.; Li, H. An Approach for Accurate Pattern Recognition of Four Hand Gestures Based on sEMG Signals. In Proceedings of the 2019 2nd International Conference on Control and Robot Technology (ICCRT 2019), Jeju, Republic of Korea, 12–14 December 2019; Association for Computing Machinery: New York, NY, USA, 2020; pp. 145–150. [Google Scholar] [CrossRef]
- Lu, J.; Guo, K.; Yang, H. Dynamic Analysis and Experimental Study of Lasso Transmission for Hand Rehabilitation Robot. Micromachines 2023, 14, 858. [Google Scholar] [CrossRef]
- Liu, C.; Li, J.; Zhang, S.; Yang, H.; Guo, K. Study on Flexible sEMG Acquisition System and Its Application in Muscle Strength Evaluation and Hand Rehabilitation. Micromachines 2022, 13, 2047. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Lu, J.; Yang, H.; Guo, K. Current State of Robotics in hand rehabilitation after stroke: A systematic review. Appl. Sci. 2022, 12, 4540. [Google Scholar] [CrossRef]




















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Guo, K.; Orban, M.; Lu, J.; Al-Quraishi, M.S.; Yang, H.; Elsamanty, M. Empowering Hand Rehabilitation with AI-Powered Gesture Recognition: A Study of an sEMG-Based System. Bioengineering 2023, 10, 557. https://doi.org/10.3390/bioengineering10050557
Guo K, Orban M, Lu J, Al-Quraishi MS, Yang H, Elsamanty M. Empowering Hand Rehabilitation with AI-Powered Gesture Recognition: A Study of an sEMG-Based System. Bioengineering. 2023; 10(5):557. https://doi.org/10.3390/bioengineering10050557
Chicago/Turabian StyleGuo, Kai, Mostafa Orban, Jingxin Lu, Maged S. Al-Quraishi, Hongbo Yang, and Mahmoud Elsamanty. 2023. "Empowering Hand Rehabilitation with AI-Powered Gesture Recognition: A Study of an sEMG-Based System" Bioengineering 10, no. 5: 557. https://doi.org/10.3390/bioengineering10050557