Figure 1.
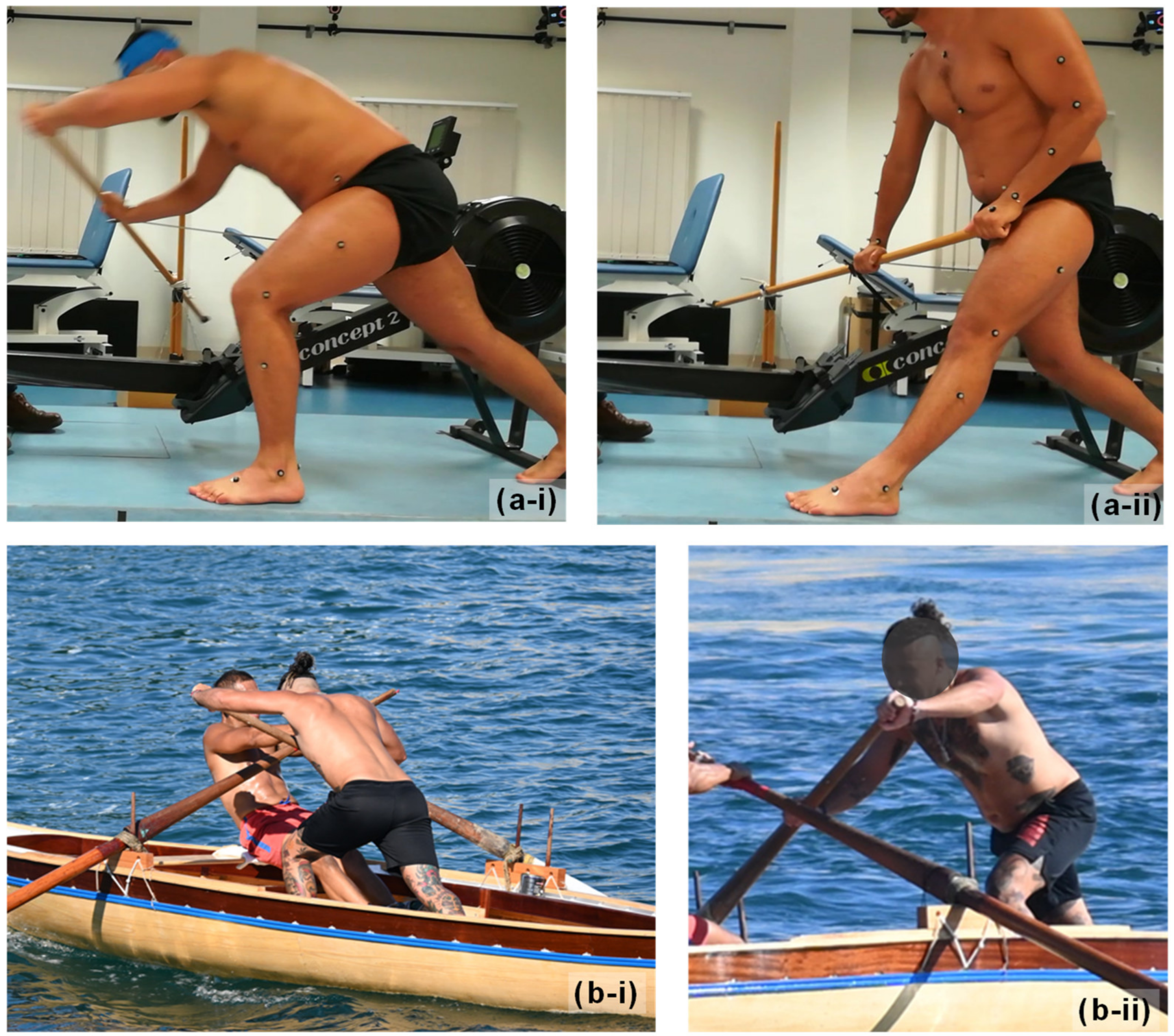
The basics of Venetian style standing rowing, demonstrated here on the Maltese “Dgħajsa tal-Pass” racing traditional rowing boat where the standing rower is shown alongside a seated rowing. (a) A shows the “finish” position for the boat set up with a crew of two (left) or four (right) rowers whilst (b) highlights the key components of the cycle, where a standing rower (locally known as the “parasija”) is rowing in sync with a standard traditional seated rower (locally known as “irmiġġier”). Illustrated here are, approximately, (i) the finish, (ii) mid-recovery, (iii) the catch and (iv) mid-drive. Note that in boats with two rowers, the seated rower keeps the stoke rate whilst the standing rower steers.
Figure 1.
The basics of Venetian style standing rowing, demonstrated here on the Maltese “Dgħajsa tal-Pass” racing traditional rowing boat where the standing rower is shown alongside a seated rowing. (a) A shows the “finish” position for the boat set up with a crew of two (left) or four (right) rowers whilst (b) highlights the key components of the cycle, where a standing rower (locally known as the “parasija”) is rowing in sync with a standard traditional seated rower (locally known as “irmiġġier”). Illustrated here are, approximately, (i) the finish, (ii) mid-recovery, (iii) the catch and (iv) mid-drive. Note that in boats with two rowers, the seated rower keeps the stoke rate whilst the standing rower steers.
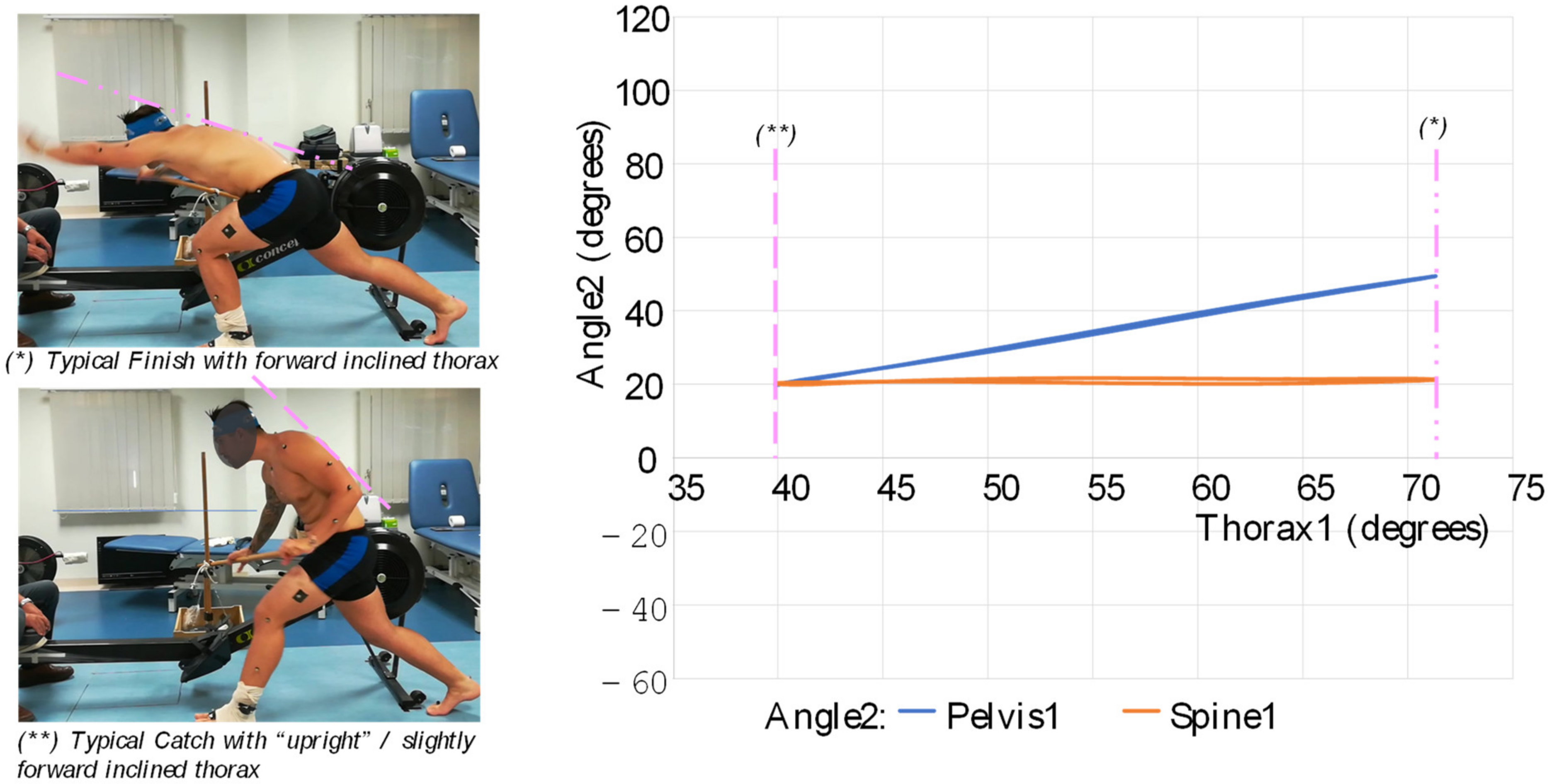
Figure 2.
(a) The set up used in the laboratory to mimic the on-water setup, shown in (b). Note that the rowers in (a-i) and (b) are nearing to the “finish” whilst the rower in (a-ii) is nearing the “catch”. Note also the position of the reflective markers, shown more clearly in (a-ii).
Figure 2.
(a) The set up used in the laboratory to mimic the on-water setup, shown in (b). Note that the rowers in (a-i) and (b) are nearing to the “finish” whilst the rower in (a-ii) is nearing the “catch”. Note also the position of the reflective markers, shown more clearly in (a-ii).
Figure 3.
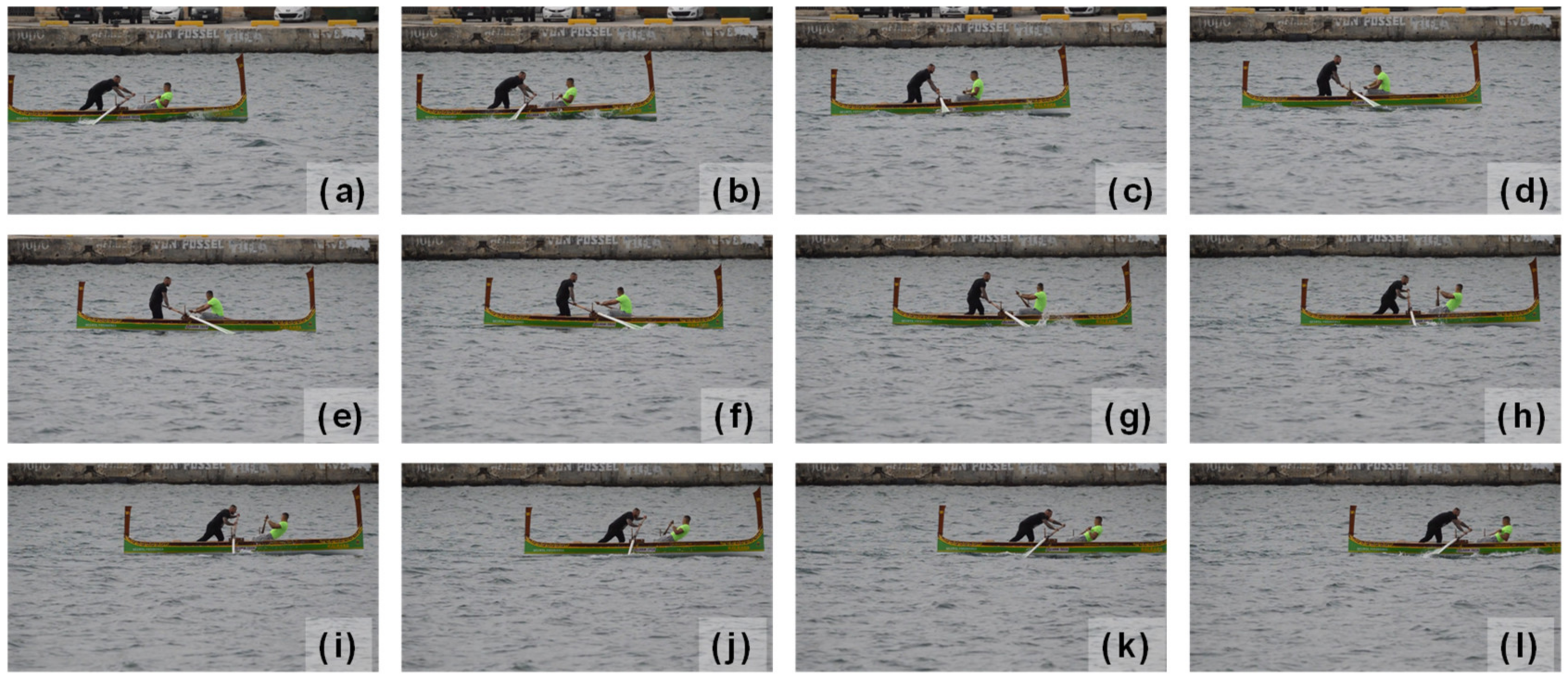
A detailed sequence of images showing the kinematics of standing rowing recorded on water on a Maltese Dgħajsa tal-Pass. Note that the catch, drive, finish and recovery of the sitting and standing rowers is synchronised, as is normal in rowing. (a–l) illustrate different parts of the stroke with (a,l) representing the finish; with the catch commencing at (e).
Figure 3.
A detailed sequence of images showing the kinematics of standing rowing recorded on water on a Maltese Dgħajsa tal-Pass. Note that the catch, drive, finish and recovery of the sitting and standing rowers is synchronised, as is normal in rowing. (a–l) illustrate different parts of the stroke with (a,l) representing the finish; with the catch commencing at (e).
Figure 4.
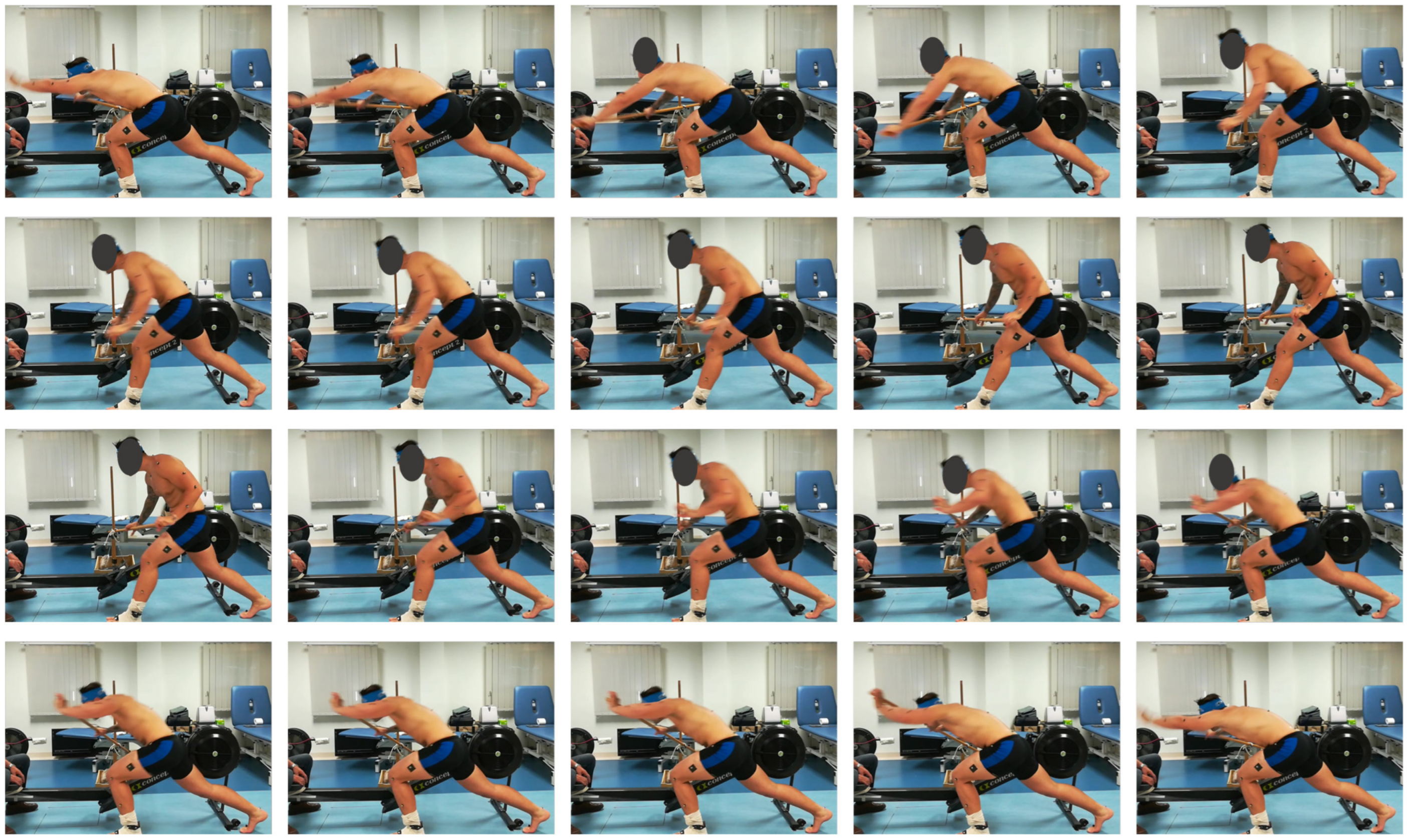
A sequence of images showing a typical standing rowing cycle as performed in the lab, with the first two rows of images showing the “recovery” phase (starting from the “finish” position) and the last two rows showing the “drive” phase (starting from the “catch”, ending with the “finish”).
Figure 4.
A sequence of images showing a typical standing rowing cycle as performed in the lab, with the first two rows of images showing the “recovery” phase (starting from the “finish” position) and the last two rows showing the “drive” phase (starting from the “catch”, ending with the “finish”).
Figure 5.
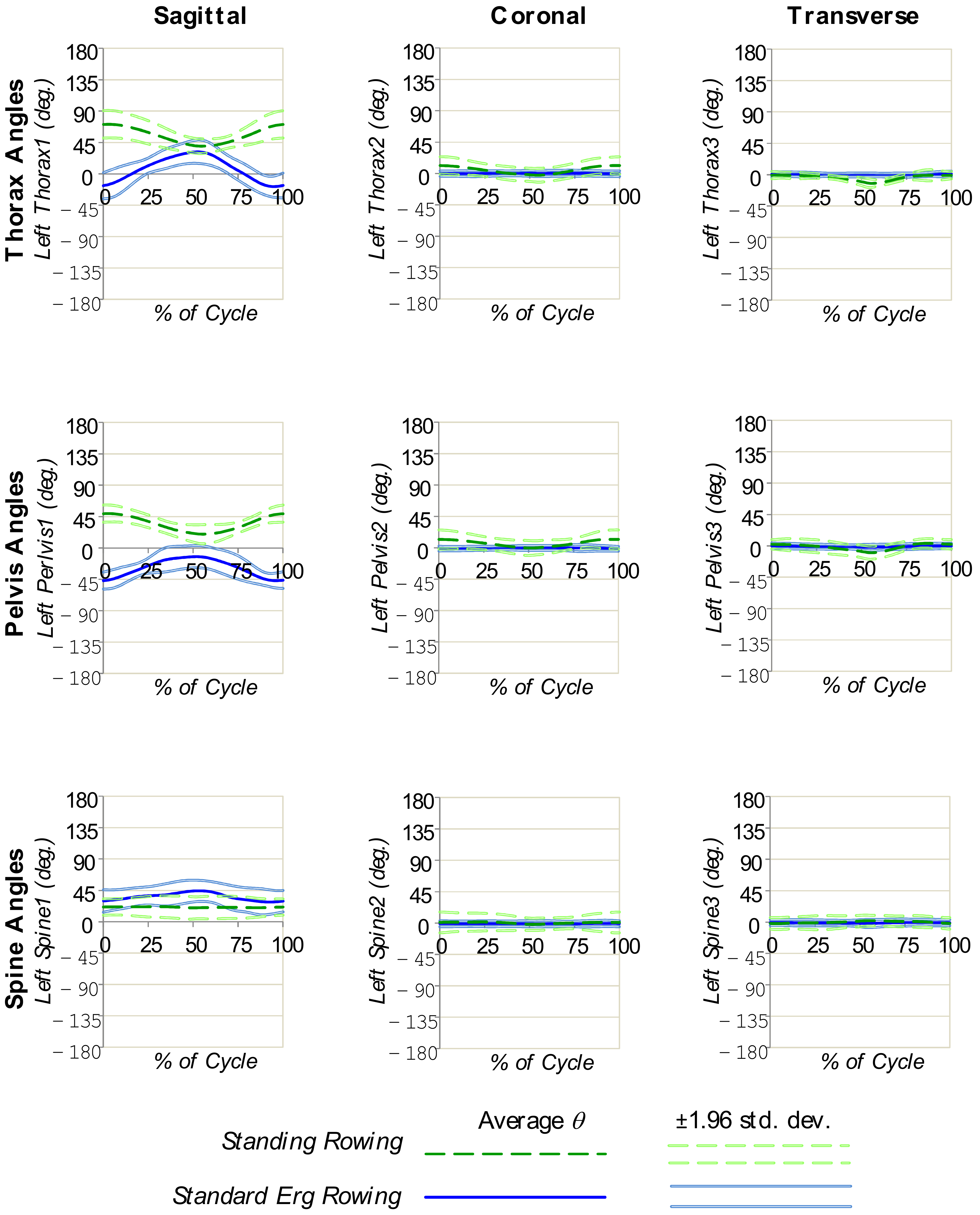
The averaged angular measurements for the thorax, pelvis and spine from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 5.
The averaged angular measurements for the thorax, pelvis and spine from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 6.
Angle–Angle plots, which illustrate the relationship between movements in sagittal plane of the pelvis/spine with that of the thorax. See also
Supplementary Materials.
Figure 6.
Angle–Angle plots, which illustrate the relationship between movements in sagittal plane of the pelvis/spine with that of the thorax. See also
Supplementary Materials.
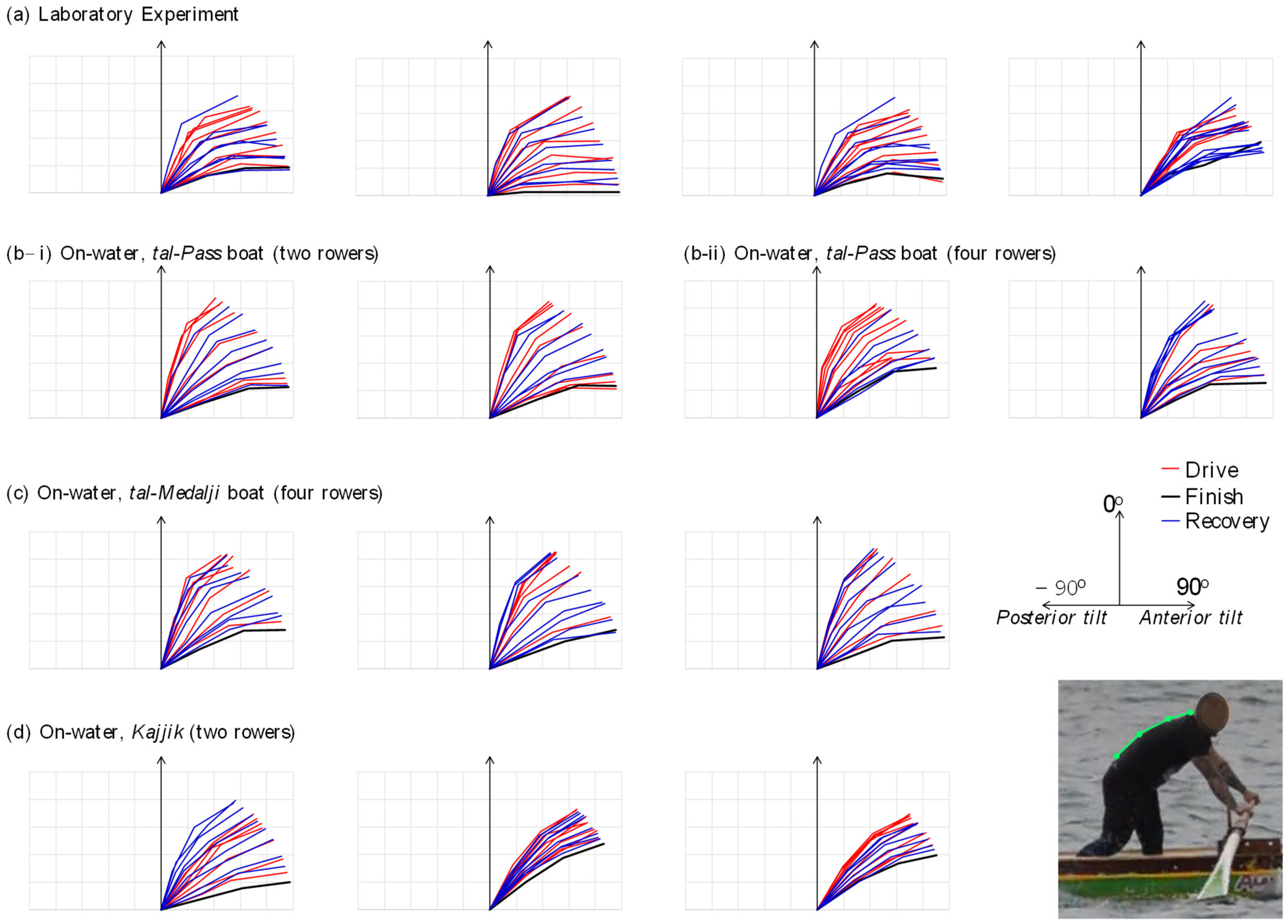
Figure 7.
Images showing the typical outline of the back profiles traced from images extracted from video of on-water rowing and the lab study for standing rowing, where (a) shows cycles from each of the different rowers in the laboratory study, whilst (b–d) refer to the equivalent profiles from rowers rowing on different types of boats. The boats studied are all traditional Maltese rowing racing boats where (b) is the widest and heaviest Tal-Pass boat which can be rowed by two rowers, one sitting one standing (b-i), or four rowers, two sitting, two standing (b-ii); (c) refers to the more slender, slightly longer, and lighter Tal-Medalji version, also rowed by four rowers, two sitting, two standing whilst (d) refers to the much shorter Kajjik, rowed by two rowers, one sitting, one standing. The rower analysed is always the standing rower with the oar on his right-hand side (parasija). The manner of how these profiles were drawn is illustrated in the insert. Note that profiles refer to rowers facing the right direction.
Figure 7.
Images showing the typical outline of the back profiles traced from images extracted from video of on-water rowing and the lab study for standing rowing, where (a) shows cycles from each of the different rowers in the laboratory study, whilst (b–d) refer to the equivalent profiles from rowers rowing on different types of boats. The boats studied are all traditional Maltese rowing racing boats where (b) is the widest and heaviest Tal-Pass boat which can be rowed by two rowers, one sitting one standing (b-i), or four rowers, two sitting, two standing (b-ii); (c) refers to the more slender, slightly longer, and lighter Tal-Medalji version, also rowed by four rowers, two sitting, two standing whilst (d) refers to the much shorter Kajjik, rowed by two rowers, one sitting, one standing. The rower analysed is always the standing rower with the oar on his right-hand side (parasija). The manner of how these profiles were drawn is illustrated in the insert. Note that profiles refer to rowers facing the right direction.
![Bioengineering 10 00310 g007]()
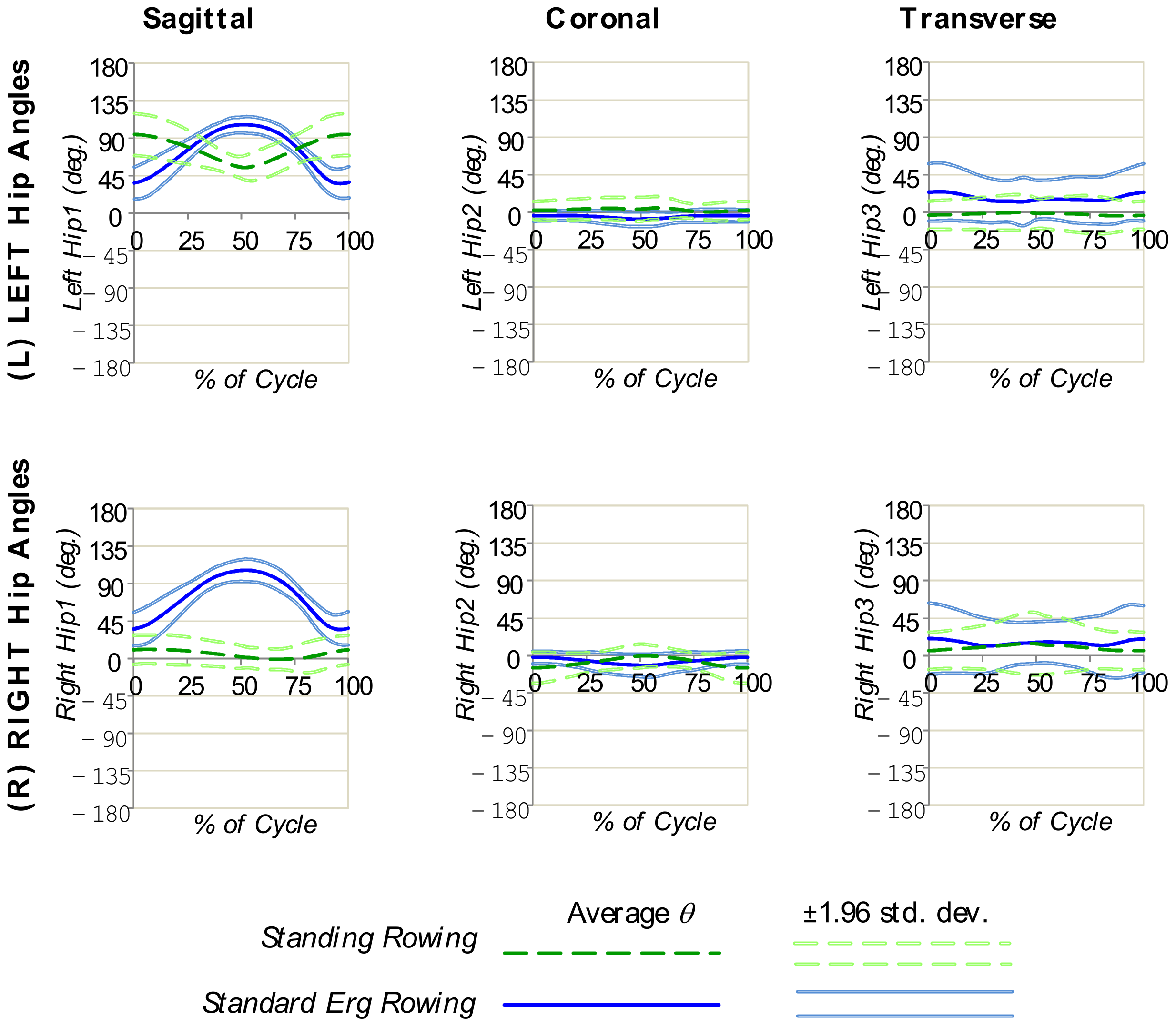
Figure 8.
The averaged angular measurements for the hip from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 8.
The averaged angular measurements for the hip from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
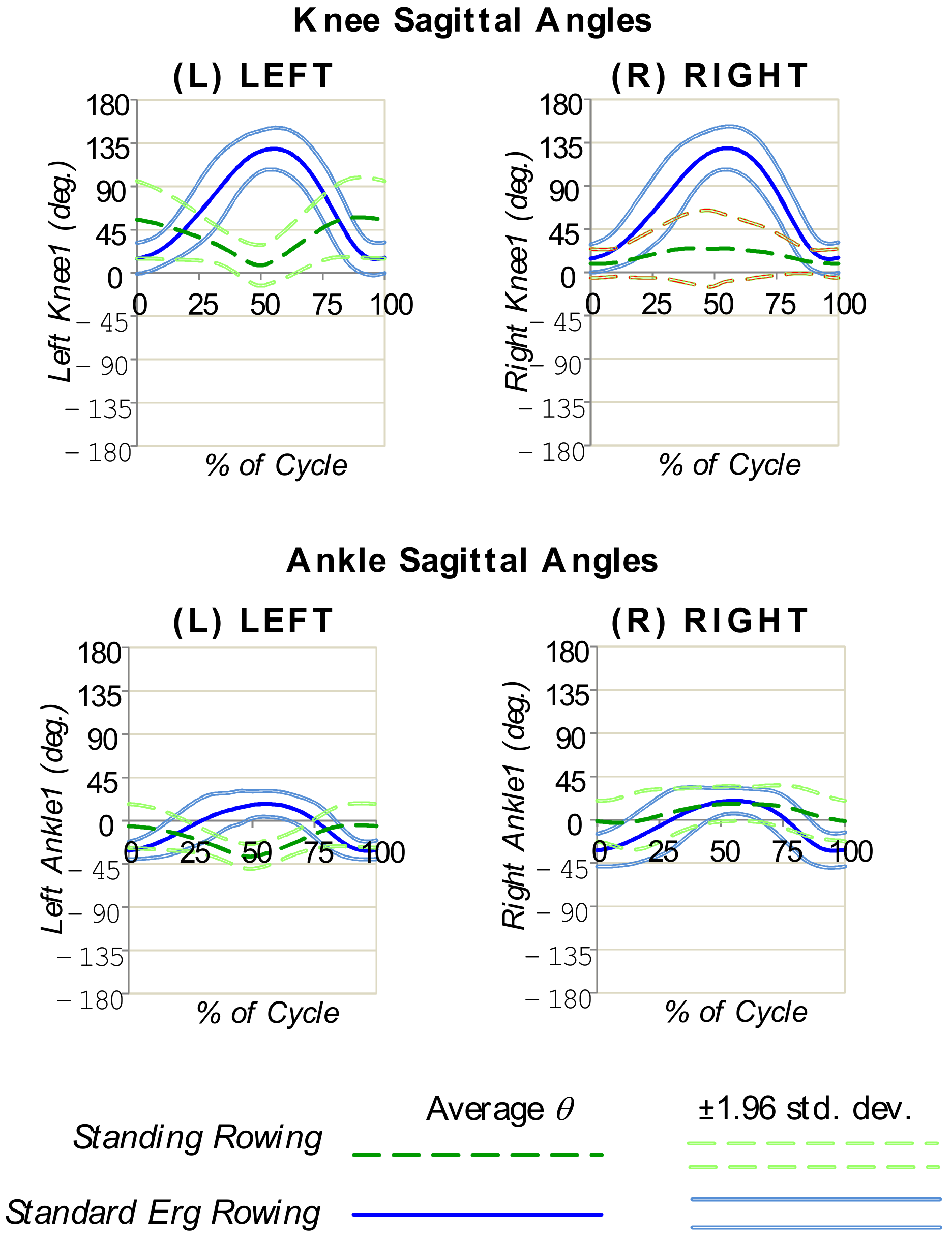
Figure 9.
The averaged angular measurements for the knee and ankle (sagittal) from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 9.
The averaged angular measurements for the knee and ankle (sagittal) from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
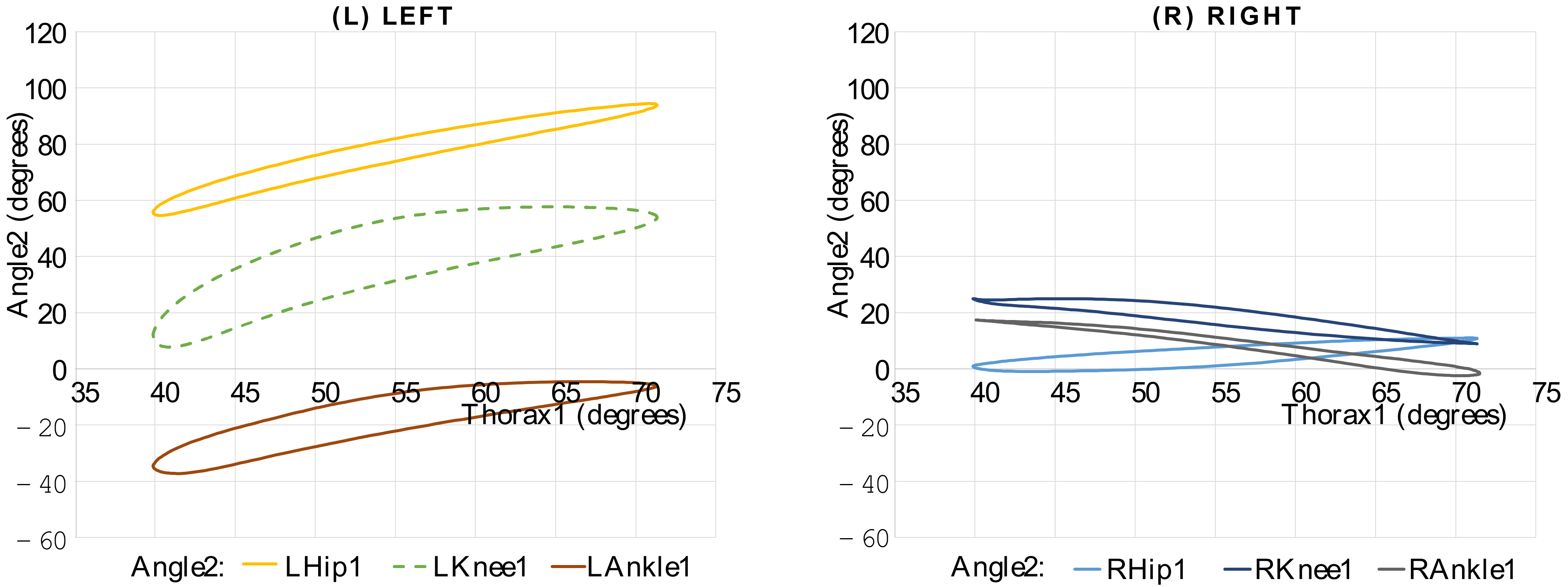
Figure 10.
Angle–Angle plots which illustrate the relationship between movements in the lower body with that of the thorax. See also
supplementary information for other plots.
Figure 10.
Angle–Angle plots which illustrate the relationship between movements in the lower body with that of the thorax. See also
supplementary information for other plots.
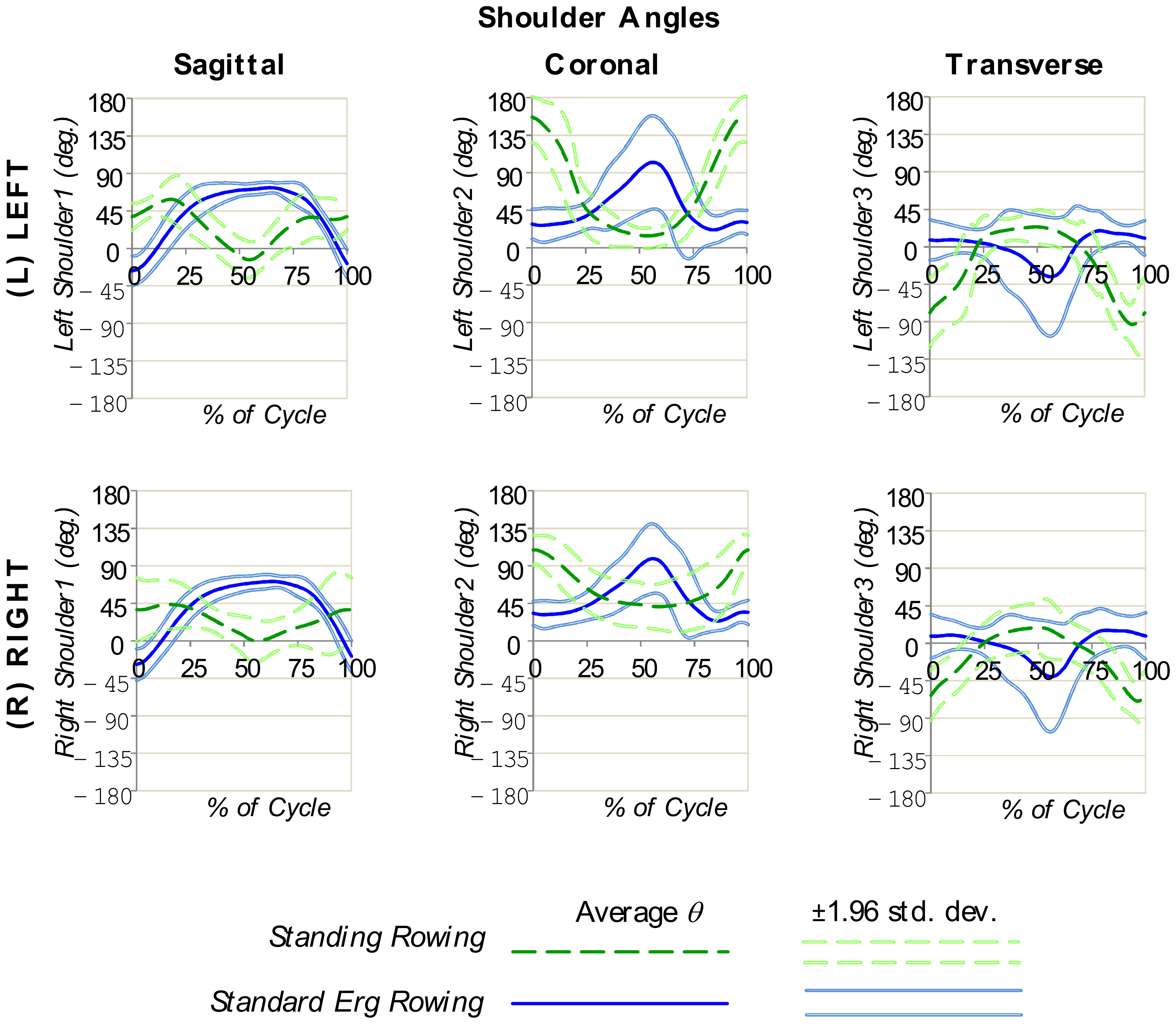
Figure 11.
The averaged angular measurements for the shoulders from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 11.
The averaged angular measurements for the shoulders from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
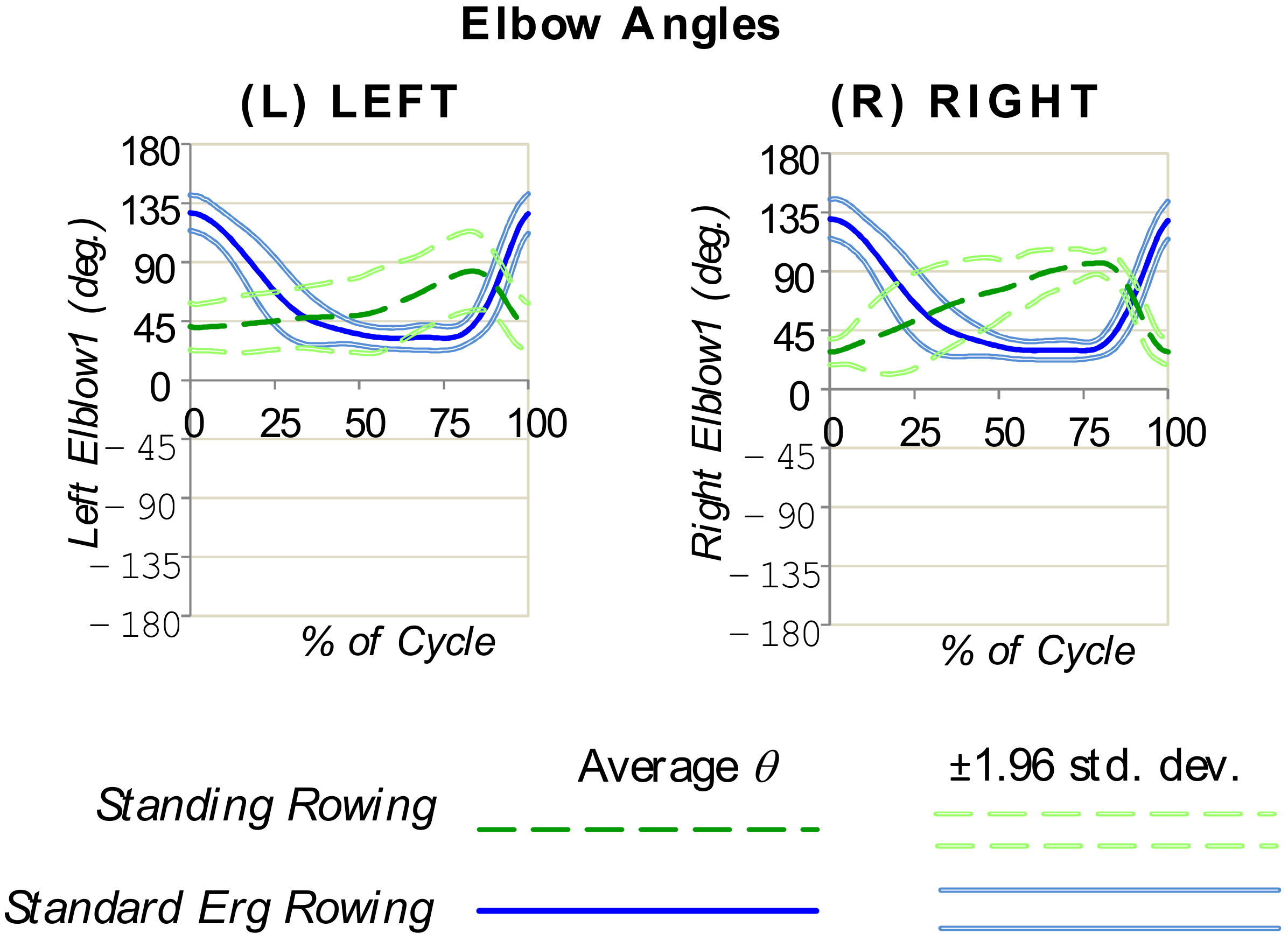
Figure 12.
The averaged angular measurements for the elbow (sagittal) from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
Figure 12.
The averaged angular measurements for the elbow (sagittal) from the laboratory study, reported as mean ± 1.96 s.d., which compares standing rowing (green) with standard ergometer sliding-seat rowing (blue).
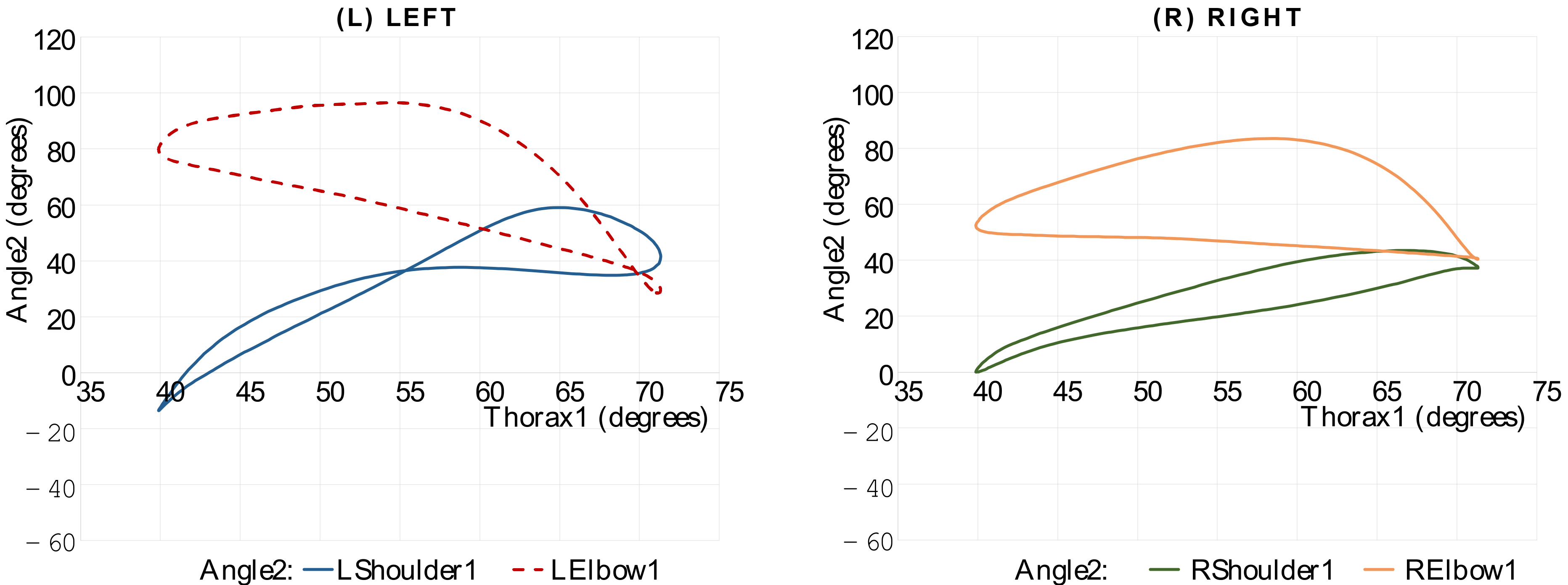
Figure 13.
Angle–Angle plots which illustrate the relationship between movements in the shoulders and elbow with that of the thorax. See also
Supplementary Materials for other plots.
Figure 13.
Angle–Angle plots which illustrate the relationship between movements in the shoulders and elbow with that of the thorax. See also
Supplementary Materials for other plots.
Table 1.
The range of motion values, θROM, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 1.
The range of motion values, θROM, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θROM | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Thorax1 | L | 24.7 ± 3.1 | 47.7 ± 1.2 | 39 ± 4.4 | 18 ± 3 | 32.3 ± 12.5 | 52 ± 11.3 | (0.000) |
| Thorax2 | L | 12 ± 1 | 17 ± 1 | 21.3 ± 2.5 | 9.3 ± 2.9 | 14.9 ± 5.1 | 2.9 ± 1.2 | (0.000) |
| Thorax3 | L | 10.7 ± 1.5 | 11.7 ± 0.6 | 20.3 ± 4.2 | 15.3 ± 2.9 | 14.5 ± 4.6 | 3.3 ± 1.6 | (0.000) |
| Pelvis1 | L | 29.3 ± 2.9 | 44 ± 2 | 30.3 ± 1.5 | 18 ± 5.6 | 30.4 ± 10 | 36.3 ± 9.3 | (0.139) |
| Pelvis2 | L | 12 ± 1.7 | 10 ± 2 | 21.7 ± 1.5 | 9.7 ± 2.1 | 13.3 ± 5.3 | 2.7 ± 1.5 | (0.000) |
| Pelvis3 | L | 10.3 ± 2.1 | 13 ± 1 | 20.7 ± 3.8 | 15 ± 3.6 | 14.8 ± 4.7 | 3.5 ± 1.6 | (0.000) |
| Spine1 | L | 9.3 ± 1.5 | 7.3 ± 1.5 | 7.3 ± 2.1 | 4 ± 1 | 7 ± 2.4 | 17.3 ± 6.6 | (0.000) |
| Spine2 | L | 6.3 ± 0.6 | 5.7 ± 1.5 | 6.7 ± 1.2 | 5.7 ± 2.1 | 6.1 ± 1.3 | 2.8 ± 0.9 | (0.000) |
| Spine3 | L | 7.3 ± 1.5 | 5.3 ± 1.5 | 4.7 ± 1.2 | 4.7 ± 1.2 | 5.5 ± 1.6 | 2.9 ± 1 | (0.000) |
Table 2.
The minimum values, θmin, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 2.
The minimum values, θmin, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θmin | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Thorax1 | L | 46.7 ± 3.2 | 35 ± 1.7 | 37 ± 2.6 | 39.3 ± 2.1 | 39.5 ± 5.1 | −20 ± 7.6 | (0.000) |
| Thorax2 | L | 3.3 ± 1.5 | 0 ± 1 | −7.3 ± 2.5 | −7.3 ± 1.5 | −2.8 ± 5.1 | −1.4 ± 2.2 | (0.427) |
| Thorax3 | L | −11.3 ± 0.6 | −12 ± 1.7 | −16.3 ± 3.5 | −14 ± 1.7 | −13.4 ± 2.7 | −1.5 ± 1.3 | (0.000) |
| Pelvis1 | L | 15.7 ± 2.5 | 11.7 ± 3.2 | 24.3 ± 1.5 | 26 ± 5.3 | 19.4 ± 6.9 | −48.3 ± 4.7 | (0.000) |
| Pelvis2 | L | 7.3 ± 1.2 | −4.3 ± 1.2 | −3.7 ± 0.6 | −3.3 ± 2.5 | −1 ± 5.2 | −2.1 ± 1.6 | (0.000) |
| Pelvis3 | L | −8.3 ± 1.2 | −8.7 ± 0.6 | −17.7 ± 3.5 | −7 ± 1 | −10.4 ± 4.7 | −2.8 ± 1.7 | (0.000) |
| Spine1 | L | 24.3 ± 1.2 | 21.3 ± 2.5 | 13.3 ± 1.2 | 11.3 ± 2.5 | 17.6 ± 5.9 | 27.4 ± 8.6 | (0.002) |
| Spine2 | L | −0.3 ± 2.1 | −11.3 ± 2.9 | −0.7 ± 1.5 | 0.7 ± 2.5 | −2.9 ± 5.5 | −2.3 ± 1.9 | (0.397) |
| Spine3 | L | −6.3 ± 2.3 | −2.7 ± 0.6 | −4.7 ± 0.6 | 4 ± 1 | −2.4 ± 4.3 | −2.6 ± 2.6 | (0.577) |
Table 3.
The maximum values, θmax, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., compared to its equivalent mean value for standard ergometer rowing.
Table 3.
The maximum values, θmax, of the thorax, pelvis and spine angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., compared to its equivalent mean value for standard ergometer rowing.
| θmax | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Thorax1 | L | 71 ± 1 | 82.7 ± 1.5 | 76 ± 2 | 57 ± 3.5 | 71.7 ± 10 | 32.2 ± 8.5 | (0.000) |
| Thorax2 | L | 15.3 ± 2.5 | 16.7 ± 0.6 | 14.3 ± 0.6 | 2 ± 2 | 12.1 ± 6.3 | 1.7 ± 1.8 | (0.000) |
| Thorax3 | L | −0.3 ± 0.6 | −0.3 ± 1.2 | 4 ± 1 | 1.7 ± 2.5 | 1.3 ± 2.3 | 1.8 ± 1.7 | (0.314) |
| Pelvis1 | L | 45 ± 1.7 | 55.3 ± 4.7 | 55 ± 1 | 43.7 ± 0.6 | 49.8 ± 6.1 | −12 ± 8.3 | (0.000) |
| Pelvis2 | L | 19.7 ± 2.1 | 5.3 ± 2.1 | 18 ± 2 | 6.7 ± 0.6 | 12.4 ± 6.9 | 0.8 ± 2 | (0.000) |
| Pelvis3 | L | 2 ± 3 | 4.3 ± 1.5 | 3 ± 1.7 | 8.3 ± 4 | 4.4 ± 3.4 | 0.7 ± 2 | (0.001) |
| Spine1 | L | 33.7 ± 2.1 | 29 ± 2.6 | 20.3 ± 2.5 | 15 ± 3.6 | 24.5 ± 8 | 44.8 ± 7.8 | (0.000) |
| Spine2 | L | 6 ± 1.7 | −6.3 ± 1.2 | 5.7 ± 2.1 | 6.3 ± 1.5 | 2.9 ± 5.8 | 0.4 ± 2.2 | (0.015) |
| Spine3 | L | 0.3 ± 1.2 | 2.7 ± 1.5 | 0 ± 1 | 9 ± 1 | 3 ± 3.9 | 0.3 ± 2.6 | (0.061) |
Table 4.
The range of motion values, θROM, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 4.
The range of motion values, θROM, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θROM | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Hip1 | L | 43.7 ± 2.5 | 49.3 ± 4.7 | 48 ± 1 | 23 ± 3.6 | 41 ± 11.4 | 72.5 ± 9.9 | (0.000) |
| | R | 16.3 ± 1.5 | 23 ± 2.6 | 6.3 ± 2.1 | 9 ± 1 | 13.7 ± 7 | 72.4 ± 10.2 | (0.000) |
| Hip2 | L | 8.7 ± 0.6 | 3.3 ± 0.6 | 7.3 ± 2.1 | 5 ± 1 | 6.1 ± 2.4 | 7.7 ± 3.4 | (0.236) |
| | R | 14 ± 1.7 | 9.3 ± 2.5 | 25.7 ± 2.1 | 12.7 ± 3.2 | 15.4 ± 6.8 | 11.2 ± 5.2 | (0.162) |
| Hip3 | L | 7 ± 1 | 9.7 ± 1.5 | 4 ± 1.7 | 9.7 ± 1.2 | 7.6 ± 2.7 | 16.9 ± 6.5 | (0.000) |
| | R | 18 ± 8 | 4.7 ± 1.2 | 7.3 ± 2.1 | 17 ± 15.6 | 11.8 ± 9.7 | 18.5 ± 5.8 | (0.008) |
| Knee1 | L | 65.3 ± 1.5 | 37.7 ± 3.2 | 64.3 ± 3.1 | 42.3 ± 4.5 | 52.4 ± 13.4 | 116.6 ±13.1 | (0.000) |
| | R | 11.3 ± 2.5 | 37.7 ± 4.2 | 30 ± 0 | 11 ± 3.6 | 22.5 ± 12.4 | 116.8 ±14.6 | (0.000) |
| Ankle1 | L | 37.7 ± 0.6 | 28.3 ± 2.5 | 45 ± 1 | 26 ± 4.4 | 34.3 ± 8.2 | 49.4 ± 5.8 | (0.000) |
| | R | 36 ± 3.5 | 19.7 ± 1.5 | 14.3 ± 4.2 | 21.7 ± 5.1 | 22.9 ± 9 | 52.7 ± 6.3 | (0.000) |
Table 5.
The minimum values, θmin, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 5.
The minimum values, θmin, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θmin | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Hip1 | L | 61.7 ± 3.2 | 42.7 ± 2.5 | 57.7 ± 1.2 | 52.7 ± 2.9 | 53.7 ± 7.7 | 34.5 ± 8.7 | (0.000) |
| | R | −11.7 ± 1.2 | 2 ± 1 | 0.3 ± 0.6 | 0.3 ± 2.5 | −2.3 ± 5.9 | 33.9 ± 9.2 | (0.000) |
| Hip2 | L | 7.3 ± 2.1 | −3 ± 1 | −1.7 ± 1.2 | −3.7 ± 3.2 | −0.3 ± 5 | −9.6 ± 5 | (0.000) |
| | R | −23.3 ± 1.5 | −9.7 ± 2.3 | −24.3 ± 1.5 | −3.7 ± 0.6 | −15.3 ± 9.3 | −12.5 ± 7.2 | (0.346) |
| Hip3 | L | 4.3 ± 1.2 | −10 ± 1 | −18.7 ± 1.5 | −1 ± 1 | −6.3 ± 9.2 | 9.8 ± 15.5 | (0.004) |
| | R | 10 ± 1 | −13.7 ± 1.2 | 5.3 ± 2.9 | 16 ± 1.7 | 4.4 ± 11.7 | 6.8 ± 17.4 | (0.401) |
| Knee1 | L | 23 ± 1.7 | 4.7 ± 0.6 | 1.3 ± 1.5 | −3.3 ± 1.5 | 6.4 ± 10.5 | 13.1 ± 8.4 | (0.025) |
| | R | 13.7 ± 1.5 | 13 ± 1 | 3.7 ± 0.6 | −3.7 ± 8.6 | 6.7 ± 8.4 | 12.9 ± 7.8 | (0.055) |
| Ankle1 | L | −28 ± 2 | −43.7 ± 2.3 | −41.3 ± 1.2 | −40 ± 4.6 | −38.3 ± 6.8 | −32 ± 4.4 | (0.006) |
| | R | −18.3 ± 5.1 | 7 ± 1.7 | 8.7 ± 1.2 | −16.7 ± 2.1 | −4.8 ± 13.5 | −33 ± 9.5 | (0.000) |
Table 6.
The maximum values, θmax, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 6.
The maximum values, θmax, of the hip, knee and ankle angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θmax | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Hip1 | L | 105.3 ± 1.5 | 91.7 ± 6.8 | 105.7 ± 0.6 | 76 ± 1 | 94.7 ± 13.1 | 106.8 ± 4.8 | (0.005) |
| | R | 4.7 ± 0.6 | 25 ± 2.6 | 6.3 ± 2.1 | 9.7 ± 3.1 | 11.4 ± 8.6 | 106.3 ± 6.9 | (0.000) |
| Hip2 | L | 16 ± 2 | 0.7 ± 1.5 | 5.3 ± 1.2 | 1 ± 2 | 5.8 ± 6.6 | −2 ± 3 | (0.000) |
| | R | −9 ± 1 | −0.3 ± 3.2 | 1.3 ± 1.2 | 9.3 ± 2.9 | 0.3 ± 7.1 | −1.4 ± 4.1 | (0.000) |
| Hip3 | L | 11 ± 2 | −0.3 ± 1.5 | −15 ± 1 | 8.7 ± 1.5 | 1.1 ± 10.7 | 26.8 ± 16.3 | (0.000) |
| | R | 28 ± 8.2 | −8.7 ± 0.6 | 12.3 ± 2.3 | 33 ± 14 | 16.2 ± 18.3 | 25.4 ± 15.9 | (0.000) |
| Knee1 | L | 88.7 ± 2.9 | 42 ± 3.6 | 65.3 ± 1.5 | 39 ± 5.6 | 58.8 ± 21.2 | 129.7 ± 11 | (0.000) |
| | R | 24.7 ± 1.5 | 50 ± 4.6 | 33.7 ± 0.6 | 7.3 ± 7.8 | 28.9 ± 16.6 | 129.7 ±11.4 | (0.000) |
| Ankle1 | L | 9.7 ± 1.5 | −15.3 ± 1.5 | 3.7 ± 0.6 | −13.7 ± 3.8 | −3.9 ± 11.4 | 17.5 ± 6.8 | (0.000) |
| | R | 17.7 ± 3.5 | 27 ± 1 | 23 ± 3.6 | 6 ± 4.4 | 18.4 ± 8.7 | 19.9 ± 7 | (0.000) |
Table 7.
The range of motion values, θROM, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 7.
The range of motion values, θROM, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θROM | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Shoulder1 | L | 64.3 ± 5.9 | 79.3 ± 2.1 | 80.3 ± 4.2 | 84 ± 3.6 | 77 ± 8.6 | 101.5 ± 7.9 | (0.000) |
| | R | 22.7 ± 3.1 | 54.7 ± 3.1 | 35 ± 6.9 | 85.3 ± 3.1 | 49.4 ± 25 | 100.6 ± 9.7 | (0.000) |
| Shoulder2 | L | 152 ± 3.5 | 157.7 ± 2.5 | 162.3 ± 4.7 | 108 ± 5.3 | 145 ± 22.9 | 86 ± 27.7 | (0.000) |
| | R | 44.7 ± 7.5 | 85.7 ± 8.7 | 75.3 ± 3.2 | 83.3 ± 11 | 72.3 ± 18.5 | 80.2 ± 21.8 | (0.591) |
| Shoulder3 | L | 137.7 ± 3.8 | 112.3 ± 4.7 | 136.3 ±11.2 | 116 ± 4.4 | 125.6 ±13.3 | 62.4 ± 28.9 | (0.000) |
| | R | 69.3 ± 6 | 86 ± 12.5 | 128.7 ± 8.1 | 90 ± 8 | 93.5 ± 24 | 63.6 ± 29.7 | (0.014) |
| Elbow1 | L | 80 ± 2 | 74.3 ± 5.9 | 66 ± 2 | 66 ± 1.7 | 71.6 ± 6.8 | 102.4 ± 6.3 | (0.000) |
| | R | 39 ± 5.6 | 56.3 ± 1.2 | 33.7 ± 3.2 | 54.7 ± 3.8 | 45.9 ± 10.7 | 98 ± 6.7 | (0.000) |
Table 8.
The minimum values, θmin, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 8.
The minimum values, θmin, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θmin | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Shoulder1 | L | −17.3 ± 4.2 | −9.3 ± 2.9 | −2 ± 2.6 | −29 ± 0 | −14.4 ±10.7 | −26.7 ± 9 | (0.003) |
| | R | −0.3 ± 1.5 | −8 ± 3.5 | 14 ± 5 | −16.3 ± 2.1 | −2.7 ± 12 | −27.9 ± 9.3 | (0.000) |
| Shoulder2 | L | 12.3 ± 2.1 | 6.3 ± 2.1 | 9.3 ± 2.5 | 25.3 ± 3.2 | 13.3 ± 7.9 | 18.8 ± 7.7 | (0.034) |
| | R | 59.3 ± 4.2 | 27.7 ± 4.9 | 44.3 ± 1.2 | 22 ± 3.6 | 38.3 ± 15.6 | 21 ± 5.9 | (0.000) |
| Shoulder3 | L | −117.3 ± 4.2 | −95.7 ± 5.1 | −98.3 ± 8.1 | −85.3 ± 7.1 | −99.2 ± 13.2 | −38.6 ± 34.6 | (0.000) |
| | R | −65 ± 1 | −76.7 ±11.6 | −83.7 ± 1.5 | −64.3 ± 7.5 | −72.4 ± 10.4 | −42.7 ± 32.6 | (0.008) |
| Elbow1 | L | 24.3 ± 1.2 | 24.3 ± 1.5 | 25.3 ± 0.6 | 34.7 ± 1.2 | 27.2 ± 4.6 | 28 ± 3.6 | (0.166) |
| | R | 45.7 ± 2.1 | 37 ± 3.6 | 27.3 ± 1.2 | 42.7 ± 2.1 | 38.2 ± 7.6 | 30.5 ± 4.3 | (0.008) |
Table 9.
The maximum values, θmax, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
Table 9.
The maximum values, θmax, of the shoulder and elbow angles measured for the Venetian style rowing technique, in degrees, ± 1 s.d., for the individual rowers 1–4, their mean, and its equivalent mean value for standard ergometer rowing, with p-value for these two means reported in parentheses.
| θmax | | Venetian Rowing Technique (VRT) | Control–Erg |
|---|
| | | Rower 1 | Rower 2 | Rower 3 | Rower 4 | Mean | Mean | (p) |
|---|
| Shoulder1 | L | 46.7 ± 2.1 | 70.3 ± 1.2 | 79 ± 4 | 55 ± 3.6 | 62.8 ± 13.5 | 75 ± 3.4 | (0.007) |
| | R | 22.3 ± 1.5 | 46.7 ± 1.2 | 49 ± 3.6 | 69.3 ± 1.5 | 46.8 ± 17.5 | 72.7 ± 3.8 | (0.007) |
| Shoulder2 | L | 164.3 ± 3.5 | 164 ± 2 | 171.7 ± 2.3 | 133 ± 2.6 | 158.3 ±15.7 | 104.6 ± 28.1 | (0.000) |
| | R | 104 ± 3.6 | 113 ± 5.3 | 119.7 ± 2.1 | 104.7 ± 9.3 | 110.3 ± 8.3 | 101.2 ± 20.5 | (0.000) |
| Shoulder3 | L | 20.3 ± 1.5 | 16.7 ± 0.6 | 38 ± 3.6 | 31 ± 3.6 | 26.5 ± 9.1 | 24 ± 9.3 | (0.568) |
| | R | 5 ± 6.6 | 9.3 ± 4 | 45 ± 7.2 | 25.3 ± 0.6 | 21.2 ± 17 | 21 ± 11.2 | (0.568) |
| Elbow1 | L | 104.3 ± 1.2 | 98.7 ± 7.6 | 91.3 ± 2.5 | 100.7 ± 1.5 | 98.8 ± 6.1 | 130.3 ± 7.2 | (0.000) |
| | R | 84.7 ± 7.4 | 93.3 ± 4.7 | 60.7 ± 4 | 97 ± 3 | 83.9 ± 15.4 | 128.5 ± 6.7 | (0.000) |



 ,
, 














{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}