
Automatic Segmentation of Cervical Cells Based on Star-Convex Polygons in Pap Smear Images

Abstract
:1. Introduction
- A star-convex polygon-based SPCNet is proposed for the segmentation of adherent cervical cells. The method utilizes the star-convex polygons to detect objects within Pap smear images and then screens the polygons using a post-processing algorithm to complete the automatic segmentation of cervical cells.
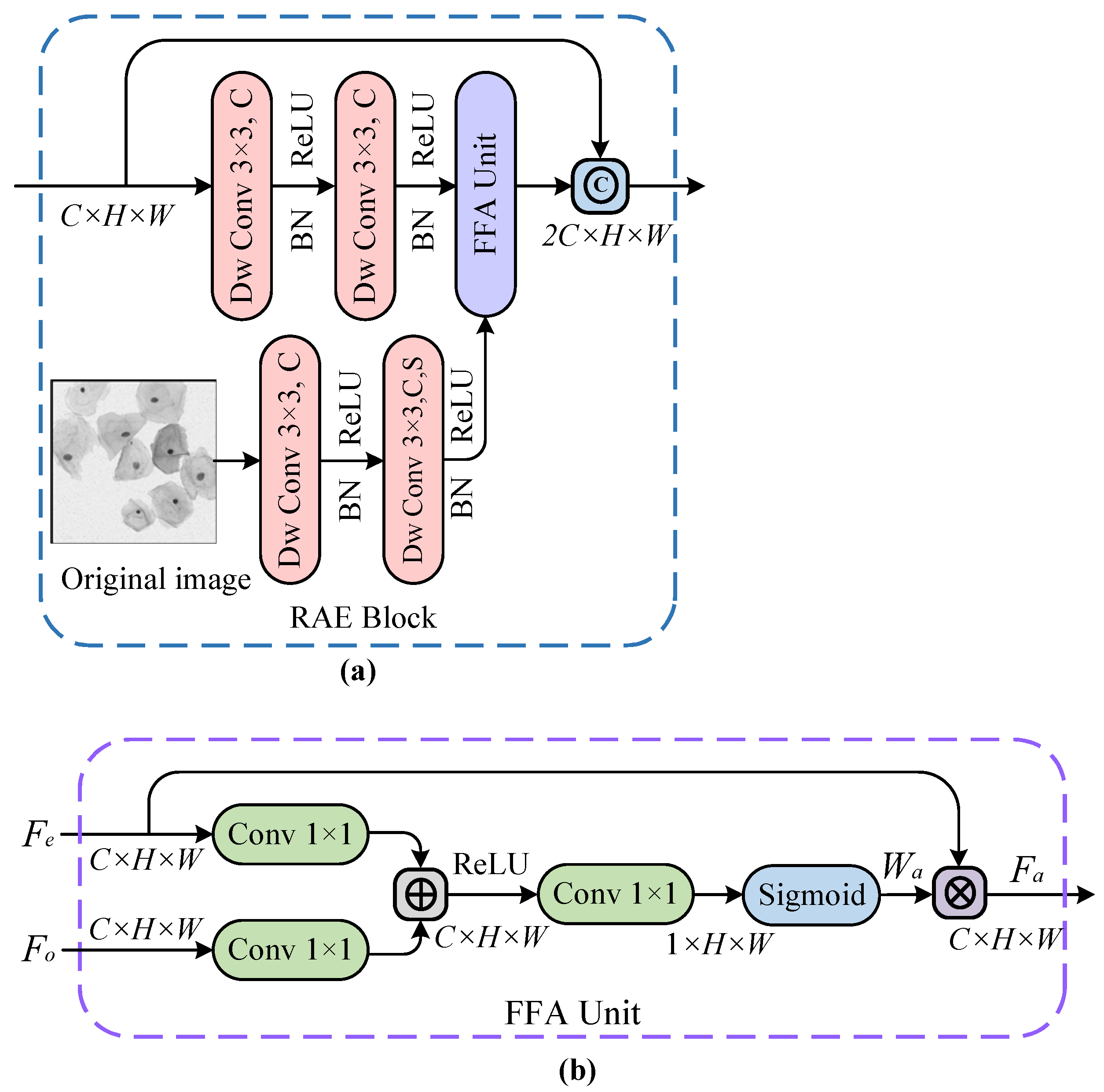
- A residual-based attention embedding block RAE is designed to extract relevant image features. The module provides strong feature extraction and representation capabilities. Moreover, a polygon-based adaptive NMS algorithm is used as the post-processing step of the network to improve the accuracy of cervical cell segmentation.
- The segmentation performance of SPCNet is evaluated on three public datasets. The experimental results demonstrate that our method outperforms other popular algorithms in both segmentation performance and generalization ability.
2. Related Work
3. Methodology
3.1. Pre-Processing
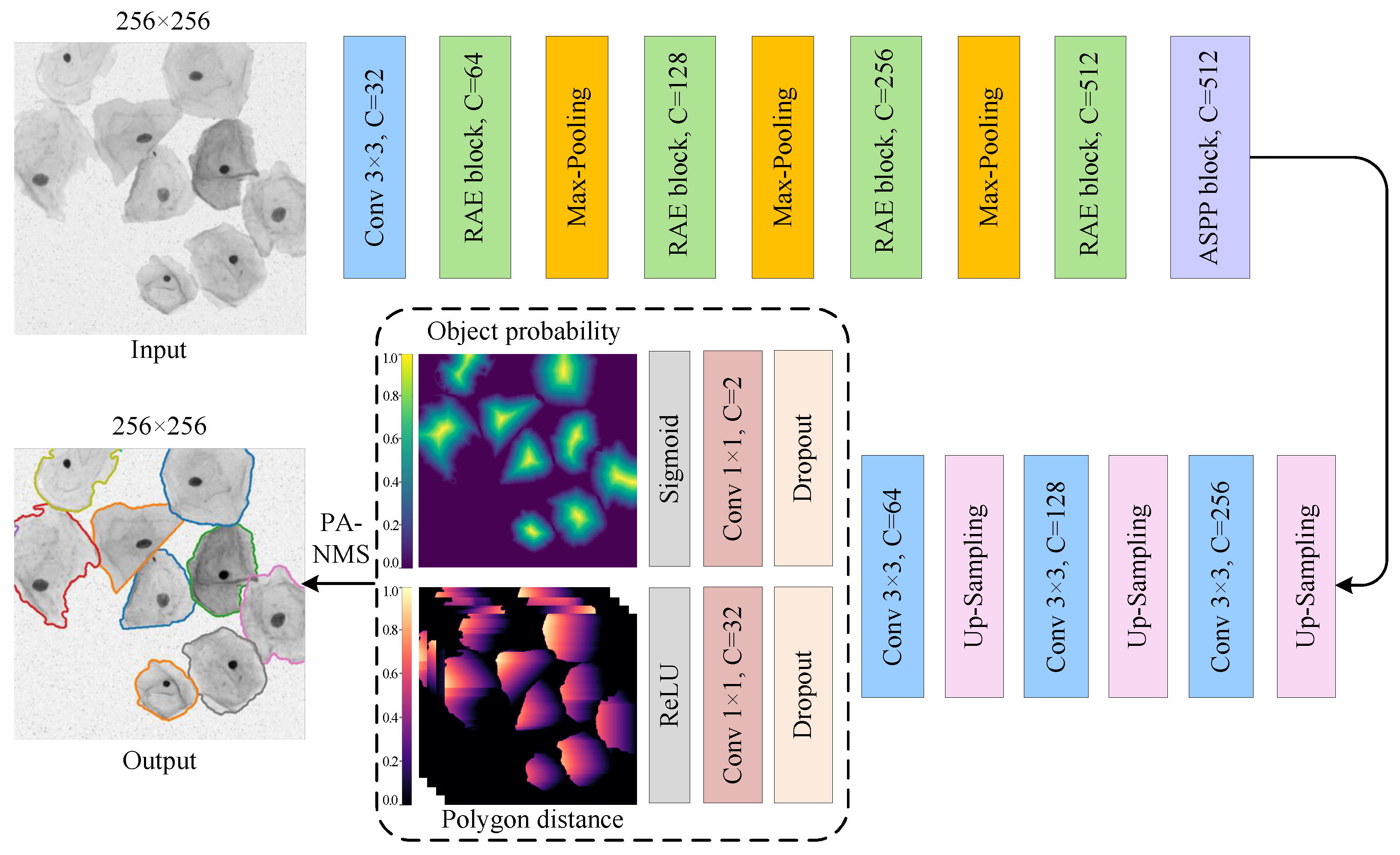
3.2. Network Architecture
3.2.1. RAE Module
3.2.2. Loss Function
3.2.3. Post-Processing
| Algorithm 1 The polygon-based PA-NMS algorithm |
| Input: B is the list of initial polygon boxes S is the list containing corresponding detection scores D is the list of corresponding detection densities is the initial threshold while : m argmax(S) = max F.append(M) B.remove(M) for p in B: if polygon_IoU remove(p) remove(s) return |
4. Experiments
4.1. Datasets
4.2. Evaluation Metrics
4.3. Implementation Details
4.4. Ablation Study
4.4.1. The Effect of RAE Module on Network Performance
4.4.2. The Effect of ASPP Module on Network Performance
4.4.3. The Effect of PA-NMS Algorithm on Model Performance
4.5. Comparison with Other Popular Models
4.5.1. Evaluation on TCC Dataset
4.5.2. Evaluation on Other Datasets
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Santesso, N.; Mustafa, R.A.; Schünemann, H.J.; Arbyn, M.; Blumenthal, P.D.; Cain, J.; Chirenje, M.; Denny, L.; De Vuyst, H.; Eckert, L.O.; et al. World Health Organization Guidelines for treatment of cervical intraepithelial neoplasia 2–3 and screen-and-treat strategies to prevent cervical cancer. Int. J. Gynecol. Obstet. 2016, 132, 252–258. [Google Scholar] [CrossRef]
- Yang-Mao, S.F.; Chan, Y.K.; Chu, Y.P. Edge enhancement nucleus and cytoplast contour detector of cervical smear images. IEEE Trans. Syst. Man Cybern. Part B (Cybern.) 2008, 38, 353–366. [Google Scholar] [CrossRef]
- Saslow, D.; Solomon, D.; Lawson, H.W.; Killackey, M.; Kulasingam, S.L.; Cain, J.; Garcia, F.A.; Moriarty, A.T.; Waxman, A.G.; Wilbur, D.C.; et al. American Cancer Society, American Society for Colposcopy and Cervical Pathology, and American Society for Clinical Pathology screening guidelines for the prevention and early detection of cervical cancer. Am. J. Clin. Pathol. 2012, 137, 516–542. [Google Scholar] [CrossRef]
- Yanase, J.; Triantaphyllou, E. A systematic survey of computer-aided diagnosis in medicine: Past and present developments. Expert Syst. Appl. 2019, 138, 112821. [Google Scholar] [CrossRef]
- Santos, M.K.; Ferreira, J.R.; Wada, D.T.; Tenório, A.P.M.; Barbosa, M.H.N.; Marques, P.M.d.A. Artificial intelligence, machine learning, computer-aided diagnosis, and radiomics: Advances in imaging towards to precision medicine. Radiol. Bras. 2019, 52, 387–396. [Google Scholar] [CrossRef] [Green Version]
- Pantanowitz, L.; Bui, M.M. Computer-assisted pap test screening. Mod. Tech. Cytopathol. 2020, 25, 67–74. [Google Scholar]
- Shan, P.; Wang, Y.; Fu, C.; Song, W.; Chen, J. Automatic skin lesion segmentation based on FC-DPN. Comput. Biol. Med. 2020, 123, 103762. [Google Scholar] [CrossRef]
- He, K.; Gkioxari, G.; Dollár, P.; Girshick, R. Mask r-cnn. In Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 22–29 October 2017; pp. 2961–2969. [Google Scholar]
- Zhang, W.; Fu, C.; Cao, L.; Sham, C.W. CODH++: Macro-semantic differences oriented instance segmentation network. Expert Syst. Appl. 2022, 202, 117198. [Google Scholar] [CrossRef]
- Salscheider, N.O. Featurenms: Non-maximum suppression by learning feature embeddings. In Proceedings of the 2020 25th International Conference on Pattern Recognition (ICPR), Milan, Italy, 10–15 January 2021; pp. 7848–7854. [Google Scholar]
- Schmidt, U.; Weigert, M.; Broaddus, C.; Myers, G. Cell detection with star-convex polygons. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Granada, Spain, 16–20 September 2018; Springer: Berlin/Heidelberg, Germany, 2018; pp. 265–273. [Google Scholar]
- Jentzen, W.; Freudenberg, L.; Eising, E.G.; Heinze, M.; Brandau, W.; Bockisch, A. Segmentation of PET volumes by iterative image thresholding. J. Nucl. Med. 2007, 48, 108–114. [Google Scholar]
- Plissiti, M.E.; Nikou, C.; Charchanti, A. Automated detection of cell nuclei in pap smear images using morphological reconstruction and clustering. IEEE Trans. Inf. Technol. Biomed. 2010, 15, 233–241. [Google Scholar] [CrossRef]
- Alnabelsi, S.H. Cervical cancer diagnostic system using adaptive fuzzy moving k-means algorithm and fuzzy min-max neural network. J. Theor. Appl. Inf. Technol. 2013, 57, 48–53. [Google Scholar]
- Fan, J.; Wang, R.; Li, S.; Zhang, C. Automated cervical cell image segmentation using level set based active contour model. In Proceedings of the 2012 12th International Conference on Control Automation Robotics & Vision (ICARCV), Guangzhou, China, 5–7 December 2012; pp. 877–882. [Google Scholar]
- Zhou, H.; Li, X.; Schaefer, G.; Celebi, M.E.; Miller, P. Mean shift based gradient vector flow for image segmentation. Comput. Vis. Image Underst. 2013, 117, 1004–1016. [Google Scholar] [CrossRef] [Green Version]
- Putzu, L.; Di Ruberto, C. White blood cells identification and counting from microscopic blood image. Int. J. Med. Health Sci. 2013, 7, 20–27. [Google Scholar]
- Ruberto, C.D.; Loddo, A.; Putzu, L. A multiple classifier learning by sampling system for white blood cells segmentation. In Proceedings of the International Conference on Computer Analysis of Images and Patterns, Valletta, Malta, 2–4 September 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 415–425. [Google Scholar]
- Li, K.; Lu, Z.; Liu, W.; Yin, J. Cytoplasm and nucleus segmentation in cervical smear images using Radiating GVF Snake. Pattern Recognit. 2012, 45, 1255–1264. [Google Scholar] [CrossRef]
- Lu, Z.; Carneiro, G.; Bradley, A.P. An improved joint optimization of multiple level set functions for the segmentation of overlapping cervical cells. IEEE Trans. Image Process. 2015, 24, 1261–1272. [Google Scholar]
- Aggarwal, V.; Gagandeep. A review: Deep learning technique for image classification. ACCENTS Trans. Image Process. Comput. Vis. 2018, 4, 21. [Google Scholar] [CrossRef]
- Dargan, S.; Kumar, M.; Ayyagari, M.R.; Kumar, G. A survey of deep learning and its applications: A new paradigm to machine learning. Arch. Comput. Methods Eng. 2020, 27, 1071–1092. [Google Scholar] [CrossRef]
- Dong, S.; Wang, P.; Abbas, K. A survey on deep learning and its applications. Comput. Sci. Rev. 2021, 40, 100379. [Google Scholar] [CrossRef]
- Song, W.; Fu, C.; Zheng, Y.; Cao, L.; Tie, M.; Sham, C.W. Protection of image ROI using chaos-based encryption and DCNN-based object detection. Neural Comput. Appl. 2022, 34, 5743–5756. [Google Scholar] [CrossRef]
- Zheng, Y.; Tian, H.; Du, M.; Fu, C. Encrypted video search: Scalable, modular, and content-similar. In Proceedings of the 13th ACM Multimedia Systems Conference, Athlone, Ireland, 14–17 June 2022; pp. 177–190. [Google Scholar]
- Zhang, W.; Fu, C.; Xie, H.; Zhu, M.; Tie, M.; Chen, J. Global context aware RCNN for object detection. Neural Comput. Appl. 2021, 33, 11627–11639. [Google Scholar] [CrossRef]
- Zhao, Y.; Fu, C.; Xu, S.; Cao, L.; Ma, H.F. LFANet: Lightweight feature attention network for abnormal cell segmentation in cervical cytology images. Comput. Biol. Med. 2022, 145, 105500. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Fu, C.; Zheng, Y.; Zhang, F.; Zhao, Y.; Sham, C.W. HSNet: A hybrid semantic network for polyp segmentation. Comput. Biol. Med. 2022, 150, 106173. [Google Scholar] [CrossRef] [PubMed]
- Zhang, W.; Fu, C.; Chang, X.; Zhao, T.; Li, X.; Sham, C.W. A More Compact Object Detector Head Network with Feature Enhancement and Relational Reasoning. Neurocomputing 2022, 499, 23–34. [Google Scholar] [CrossRef]
- Long, J.; Shelhamer, E.; Darrell, T. Fully convolutional networks for semantic segmentation. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Boston, MA, USA, 7–12 June 2015; pp. 3431–3440. [Google Scholar]
- Ronneberger, O.; Fischer, P.; Brox, T. U-net: Convolutional networks for biomedical image segmentation. In Proceedings of the International Conference on Medical Image Computing and Computer-Assisted Intervention, Munich, Germany, 5–9 October 2015; Springer: Berlin/Heidelberg, Germany, 2015; pp. 234–241. [Google Scholar]
- Chen, H.; Qi, X.; Yu, L.; Heng, P.A. DCAN: Deep contour-aware networks for accurate gland segmentation. In Proceedings of the IEEE conference on Computer Vision and Pattern Recognition, Las Vegas, NV, USA, 27–30 June 2016; pp. 2487–2496. [Google Scholar]
- Voigt, S.P.; Ravikumar, K.; Basu, B.; Kalidindi, S.R. Automated image processing workflow for morphological analysis of fluorescence microscopy cell images. JOM 2021, 73, 2356–2365. [Google Scholar] [CrossRef]
- Howse, J.; Minichino, J. Learning OpenCV 4 Computer Vision with Python 3: Get to Grips with Tools, Techniques, and Algorithms for Computer Vision and Machine Learning; Packt Publishing Ltd.: Birmingham, UK, 2020. [Google Scholar]
- Wahab khadim, S.; Al-ogaili, H.; Shadhar, A.M. The Finger Vein Recognition Using Deep Learning Technique. Wasit J. Comput. Math. Sci. 2022, 1, 1–11. [Google Scholar]
- Shorten, C.; Khoshgoftaar, T.M. A survey on image data augmentation for deep learning. J. Big Data 2019, 6, 1–48. [Google Scholar] [CrossRef]
- Song, W.; Zheng, Y.; Fu, C.; Shan, P. A novel batch image encryption algorithm using parallel computing. Inf. Sci. 2020, 518, 211–224. [Google Scholar] [CrossRef]
- Acharya, U.K.; Kumar, S. Genetic algorithm based adaptive histogram equalization (GAAHE) technique for medical image enhancement. Optik 2021, 230, 166273. [Google Scholar] [CrossRef]
- Song, W.; Fu, C.; Tie, M.; Sham, C.W.; Liu, J.; Ma, H.f. A fast parallel batch image encryption algorithm using intrinsic properties of chaos. Signal Process. Image Commun. 2022, 102, 116628. [Google Scholar] [CrossRef]
- Song, W.; Fu, C.; Zheng, Y.; Cao, L.; Tie, M. A practical medical image cryptosystem with parallel acceleration. J. Ambient. Intell. Humaniz. Comput. 2022, 1–15. [Google Scholar] [CrossRef]
- Song, W.; Fu, C.; Zheng, Y.; Tie, M.; Liu, J.; Chen, J. A parallel image encryption algorithm using intra bitplane scrambling. Math. Comput. Simul. 2023, 204, 71–88. [Google Scholar] [CrossRef]
- Chen, L.C.; Papandreou, G.; Kokkinos, I.; Murphy, K.; Yuille, A.L. Deeplab: Semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected crfs. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 40, 834–848. [Google Scholar] [CrossRef] [Green Version]
- Niu, Z.; Zhong, G.; Yu, H. A review on the attention mechanism of deep learning. Neurocomputing 2021, 452, 48–62. [Google Scholar] [CrossRef]
- Liu, S.; Huang, D.; Wang, Y. Adaptive nms: Refining pedestrian detection in a crowd. In Proceedings of the IEEE/CVF conference on Computer Vision and Pattern Recognition, Long Beach, CA, USA, 15–20 June 2019; pp. 6459–6468. [Google Scholar]
- Das, P.K.; Meher, S. An efficient deep convolutional neural network based detection and classification of acute lymphoblastic leukemia. Expert Syst. Appl. 2021, 183, 115311. [Google Scholar] [CrossRef]
- Win, K.P.; Kitjaidure, Y.; Hamamoto, K.; Myo Aung, T. Computer-assisted screening for cervical cancer using digital image processing of pap smear images. Appl. Sci. 2020, 10, 1800. [Google Scholar] [CrossRef] [Green Version]
- Xiang, Y.; Sun, W.; Pan, C.; Yan, M.; Yin, Z.; Liang, Y. A novel automation-assisted cervical cancer reading method based on convolutional neural network. Biocybern. Biomed. Eng. 2020, 40, 611–623. [Google Scholar] [CrossRef]
- Lian, S.; Luo, Z.; Zhong, Z.; Lin, X.; Su, S.; Li, S. Attention guided U-Net for accurate iris segmentation. J. Vis. Commun. Image Represent. 2018, 56, 296–304. [Google Scholar] [CrossRef]
- Bolya, D.; Zhou, C.; Xiao, F.; Lee, Y.J. Yolact: Real-time instance segmentation. In Proceedings of the IEEE/CVF International Conference on Computer Vision, Seoul, Republic of Korea, 27 October–2 November 2019; pp. 9157–9166. [Google Scholar]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Encoders | DC (%) | TPp (%) | FPp (%) | FN (%) | AP (%) |
|---|---|---|---|---|---|
| TCB | 89.23 | 84.49 | 0.46 | 7.51 | 86.04 |
| TCB + RC | 90.37 | 84.72 | 0.41 | 7.32 | 86.45 |
| TCB + FFA | 91.29 | 85.68 | 0.38 | 7.14 | 86.72 |
| RAE (ours) | 91.86 | 85.97 | 0.31 | 6.56 | 87.35 |
| ASPP Module | DC (%) | TPp (%) | FPp (%) | FN (%) | AP (%) |
|---|---|---|---|---|---|
| ✕ | 91.86 | 85.97 | 0.31 | 6.56 | 87.35 |
| √ | 92.08 | 86.15 | 0.24 | 6.15 | 87.93 |
| Post-Processing | DC (%) | TPp (%) | FPp (%) | FN (%) | AP (%) |
|---|---|---|---|---|---|
| NMS | 92.08 | 86.15 | 0.24 | 6.15 | 87.93 |
| PA-NMS (ours) | 92.57 | 86.78 | 0.19 | 5.46 | 89.45 |
| Models | DC (%) | TPp (%) | FPp (%) | FN (%) | AP (%) |
|---|---|---|---|---|---|
| U-Net | 83.34 | 82.49 | 0.72 | 19.32 | 82.73 |
| ATT-UNet | 84.75 | 82.86 | 0.66 | 16.08 | 83.06 |
| DCAN | 85.63 | 83.05 | 0.63 | 13.59 | 83.71 |
| Mask R-CNN | 89.18 | 84.37 | 0.37 | 9.87 | 85.82 |
| YOLACT | 87.59 | 83.21 | 0.58 | 11.63 | 84.59 |
| StarDist | 89.23 | 84.49 | 0.46 | 7.51 | 86.04 |
| SPCNet (ours) | 92.57 | 86.78 | 0.19 | 5.46 | 89.45 |
| Models | DC (%) | TPp (%) | FPp (%) | FN (%) | AP (%) |
|---|---|---|---|---|---|
| U-Net | 86.64 | 84.62 | 0.68 | 17.28 | 83.42 |
| ATT-UNet | 87.12 | 85.07 | 0.62 | 16.64 | 84.27 |
| DCAN | 88.34 | 86.25 | 0.56 | 15.88 | 84.93 |
| Mask R-CNN | 92.24 | 89.76 | 0.41 | 9.56 | 88.96 |
| YOLACT | 90.53 | 87.83 | 0.47 | 12.30 | 86.58 |
| StarDist | 92.89 | 90.04 | 0.29 | 8.17 | 89.42 |
| SPCNet (ours) | 93.67 | 90.68 | 0.18 | 6.33 | 90.09 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, Y.; Fu, C.; Zhang, W.; Ye, C.; Wang, Z.; Ma, H.-f. Automatic Segmentation of Cervical Cells Based on Star-Convex Polygons in Pap Smear Images. Bioengineering 2023, 10, 47. https://doi.org/10.3390/bioengineering10010047
Zhao Y, Fu C, Zhang W, Ye C, Wang Z, Ma H-f. Automatic Segmentation of Cervical Cells Based on Star-Convex Polygons in Pap Smear Images. Bioengineering. 2023; 10(1):47. https://doi.org/10.3390/bioengineering10010047
Chicago/Turabian StyleZhao, Yanli, Chong Fu, Wenchao Zhang, Chen Ye, Zhixiao Wang, and Hong-feng Ma. 2023. "Automatic Segmentation of Cervical Cells Based on Star-Convex Polygons in Pap Smear Images" Bioengineering 10, no. 1: 47. https://doi.org/10.3390/bioengineering10010047