
HOG-SVM Impurity Detection Method for Chinese Liquor (Baijiu) Based on Adaptive GMM Fusion Frame Difference


Abstract
:1. Introduction
2. Materials and Methods
2.1. Image Data Acquisition of Impurities
2.1.1. Image Acquisition System
2.1.2. Image Preprocessing
2.2. Detection and Identification of Impurities in Bottled Baijiu
2.2.1. Adaptive GMM Fusion Frame Difference Algorithm
GMM Model
Adaptive GMM Model
- (1)
- The number of Gaussian distributions is fixed. So, lots of useless distributions are included, resulting in a large amount of computation and poor real-time detection performance.
- (2)
- The model learning rate is fixed, which leads to poor robustness of the background area and ghosting images in the foreground area.
- (3)
- It is susceptible to light changes and prone to produce false targets for suspended impurities.
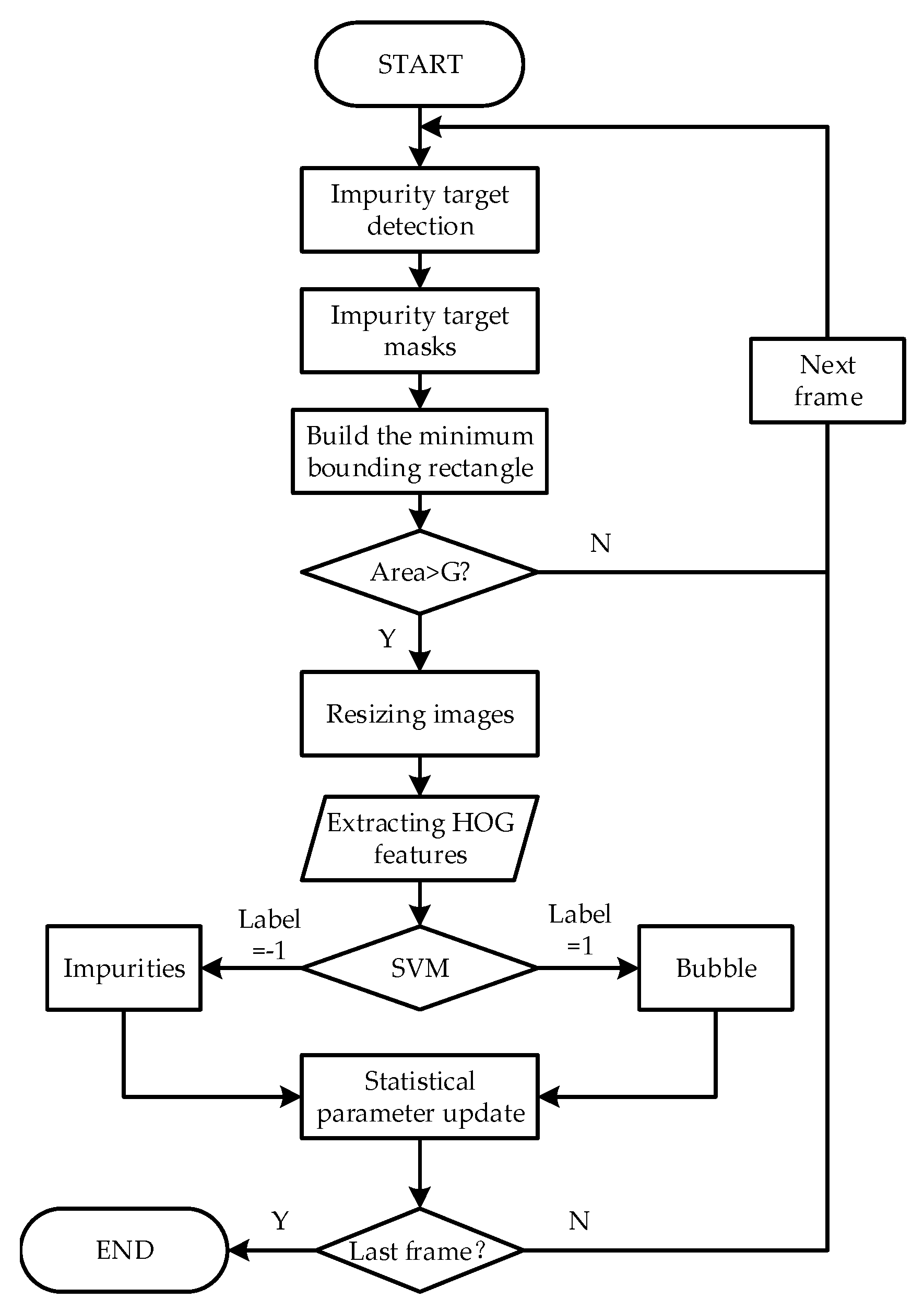
2.2.2. Impurities and Bubbles Differentiation Algorithm
3. Experiments and Results
3.1. Comparative Experiments of Detection Algorithms
3.1.1. Comparison with Image Processing Based Detection Algorithms
3.1.2. Comparison with Machine Learning-Based Detection Algorithms
3.2. Comparison Experiment of Illumination Change
3.3. Comparison Experiments with Manual Lamp Inspection
3.3.1. Comparison of Detection Performance
3.3.2. Comparison of Different Impurity Detection
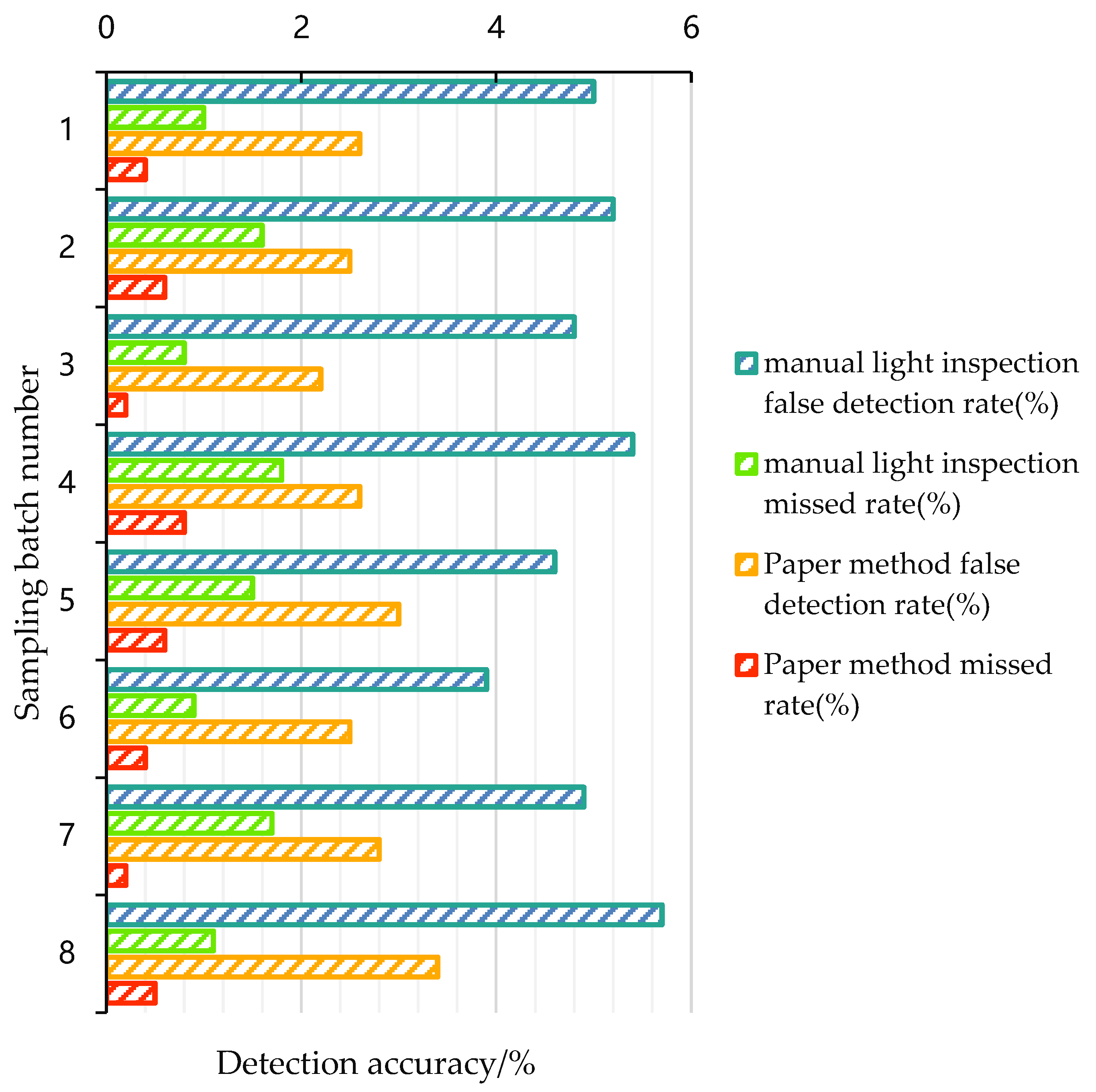
3.3.3. Comparison of Repeatability Indicators
3.3.4. Comparison of Detection Speed
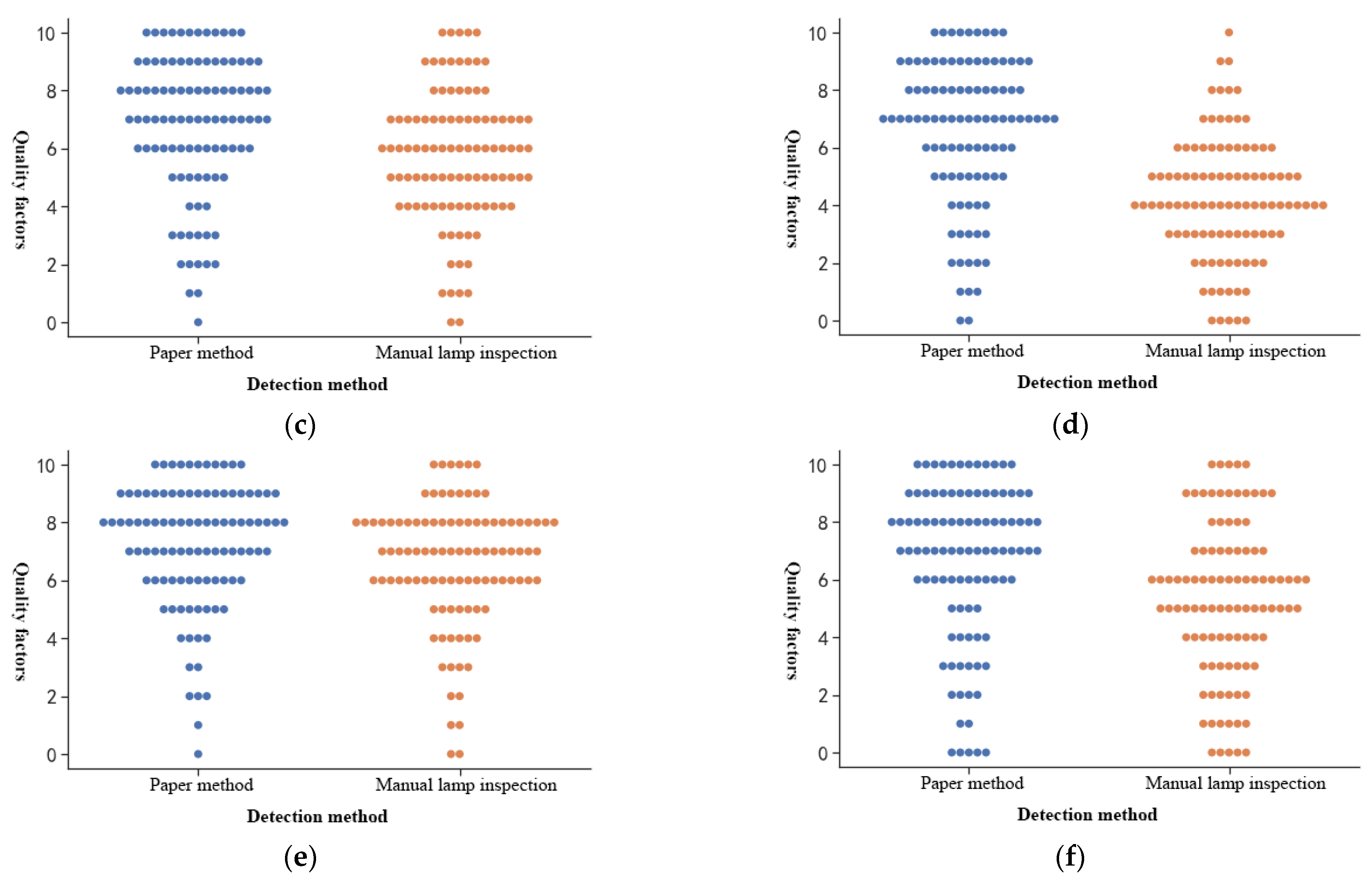
3.3.5. Knapp–Kushner Test Experiment
4. Discussion
5. Conclusions
- (1)
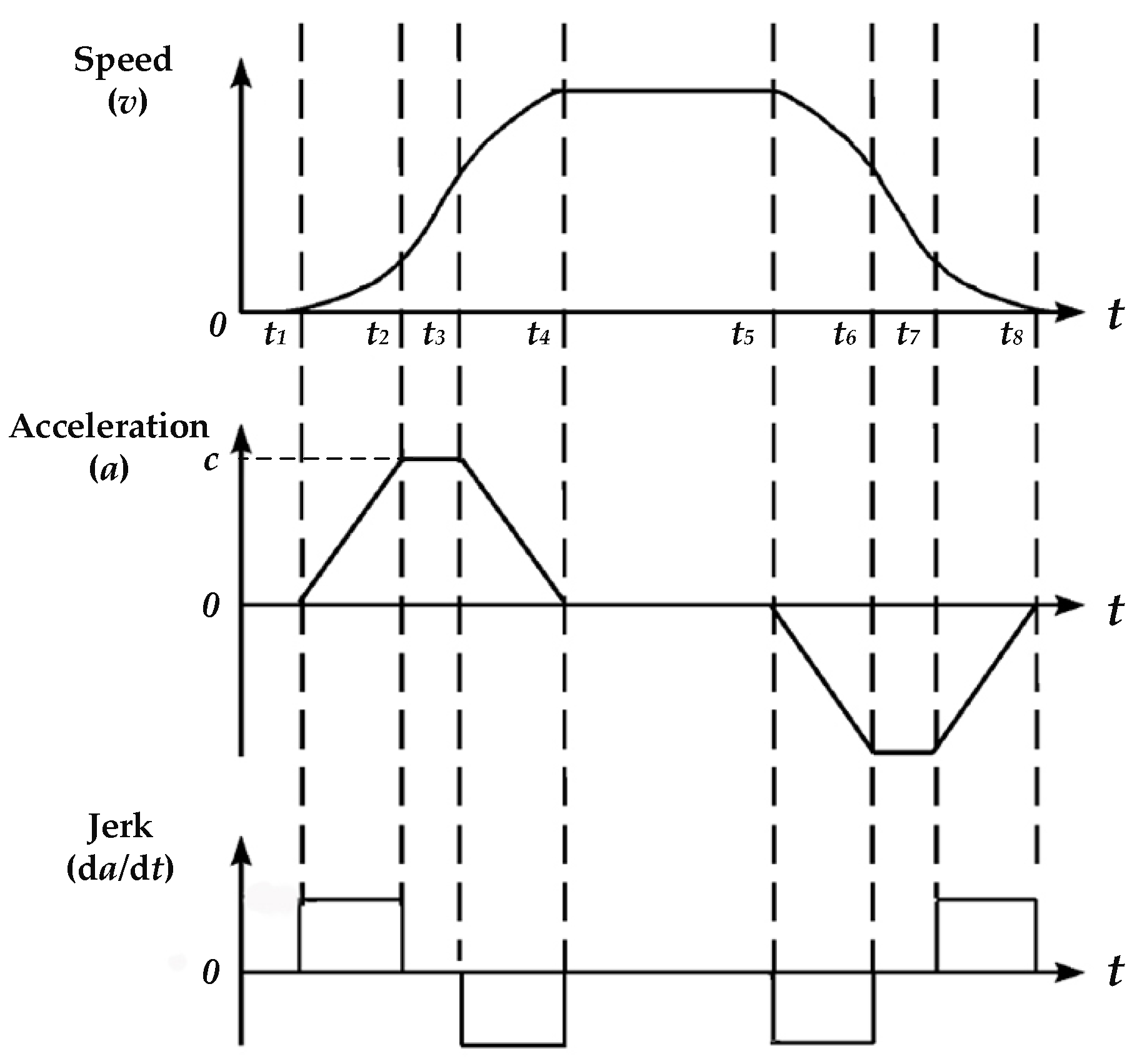
- In this paper, an image acquisition system was built, and a red planar LED with a wavelength closer to the peak sensitivity of the sensor was selected as the light source. Two illumination schemes have been developed to light from the bottom and back of the bottle, respectively. With the help of a flipping device which prompted impurities movement, high-quality images of target impurities were captured. The original images were then subjected to noise reduction, threshold segmentation, histogram equalisation and morphological operation. Further, the horizontal and vertical histogram projections of the original images were analysed to crop the ROI region for detection and to provide input data with distinct impurity features and low redundancy for later detection algorithm studies.
- (2)
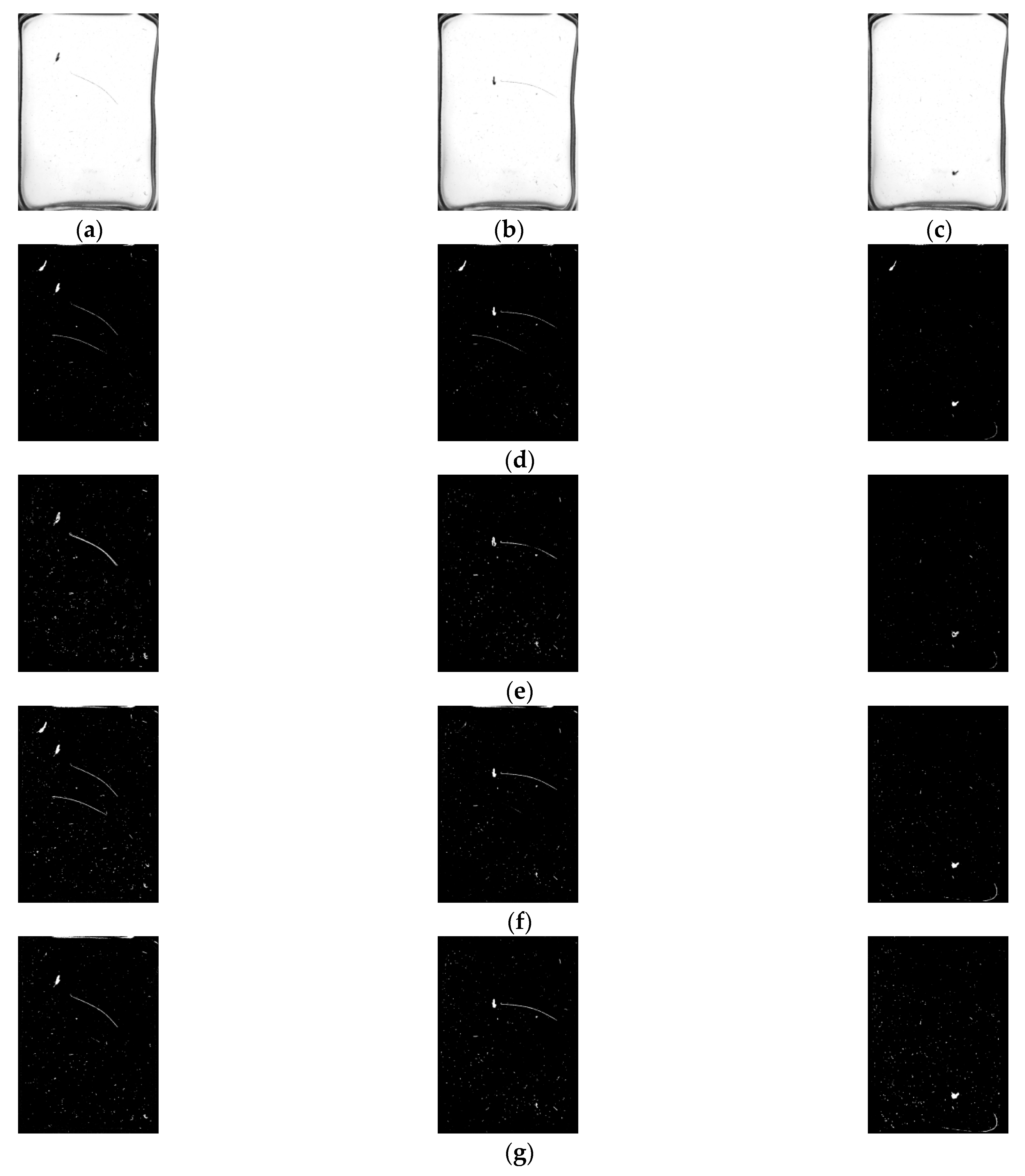
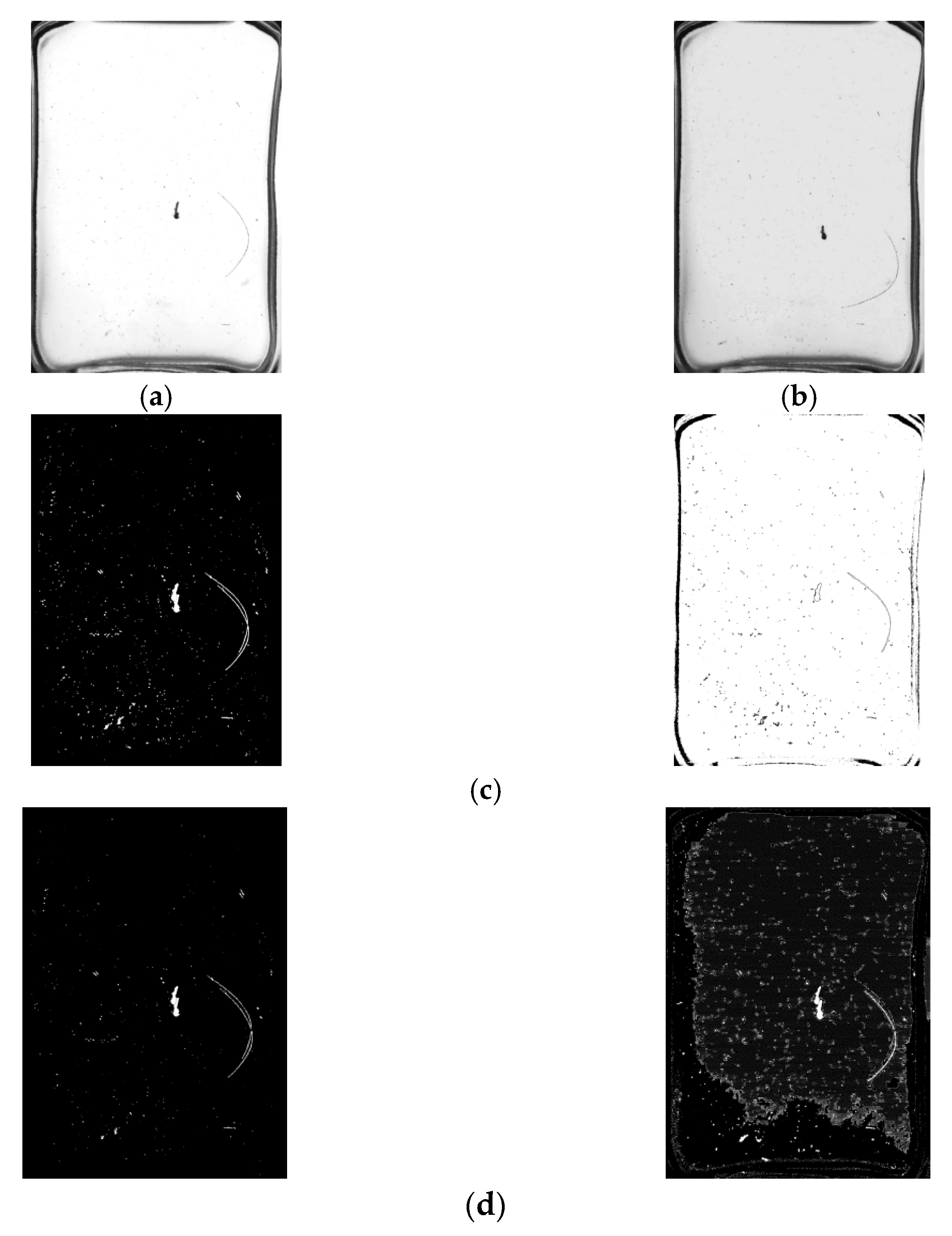
- An algorithm for Baijiu impurity detection based on an adaptive GMM fusion frame difference is proposed in this paper; this algorithm has fewer Gaussian distributions and can build a background model faster. The algorithm in this paper also shows better robustness when the light changes. Our method not only solves the Hole problem of the frame difference method but also can obtain the complete impurity pixels. Compared with the traditional GMM algorithm, the algorithm of this paper has reduced the number of redundant Gaussian distributions and can dynamically adjust the GMM learning rate. Based on the experimental analysis, it can be seen that the algorithm in this paper achieves an accuracy rate of 96.6% and a completeness rate of 95.2%. In addition, the repeatability index of the algorithm in this paper is better than the manual lamp inspection, with an average false detection rate and an average missed detection rate of 2.8% and 0.9%, respectively, and the detection efficiency ratio is greater or equal to 1, i.e., , in the Knapp–Kushner test.
- (3)
- To exclude bubble interference, HOG features were extracted from the segmented motion target images, and the SVM model was constructed using the radial basis kernel function. Validated on 1188 impurity samples and 396 bubble samples, the HOG-SVM algorithm achieved an accuracy rate of 97.5% for the entire sample, and the accuracy rates within the class are 97.7% and 96.7%, respectively.
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Jiang, Y.; Sun, J.; Yin, Z.; Li, H.; Sun, X.; Zheng, F. Evaluation of antioxidant peptides generated from Jiuzao (residue after Baijiu distillation) protein hydrolysates and their effect of enhancing healthy value of Chinese Baijiu. J. Sci. Food Agric. 2020, 100, 59–73. [Google Scholar] [CrossRef] [PubMed]
- Wu, J.; Huo, J.; Huang, M.; Zhao, M.; Luo, X.; Sun, B. Structural Characterization of a Tetrapeptide from Sesame Flavor-Type Baijiu and Its Preventive Effects against AAPH-Induced Oxidative Stress in HepG2 Cells. J. Agric. Food Chem. 2017, 65, 10495–10504. [Google Scholar] [CrossRef] [PubMed]
- Zheng, X.; Han, B. Baijiu, Chinese liquor: History, classification and manufacture. J. Ethn. Foods 2016, 3, 19–25. [Google Scholar] [CrossRef] [Green Version]
- Liu, H.; Sun, B. Effect of Fermentation Processing on the Flavor of Baijiu. J. Agric. Food Chem. 2018, 66, 5425–5432. [Google Scholar] [CrossRef]
- Ye, H.; Wang, J.; Shi, J.; Du, J.; Zhou, Y.; Huang, M.; Sun, B. Automatic and Intelligent Technologies of Solid-State Fermentation Process of Baijiu Production: Applications, Challenges, and Prospects. Foods 2021, 10, 680. [Google Scholar] [CrossRef]
- Zou, W.; Ye, G.; Zhang, K. Diversity, function, and application of Clostridium in Chinese strong flavor baijiu ecosystem: A review. J. Food Sci. 2018, 83, 1193–1199. [Google Scholar] [CrossRef] [Green Version]
- Huang, B.; Li, J.F.; Wang, J.C.; He, Y.Z.; Shang, W. Impurity Detection Using Machine Vision. Adv. Mater. Res. 2012, 468, 2057–2060. [Google Scholar] [CrossRef]
- Kato, F.; Miyakawa, T.; Shimizu, I. Developmental research of visualization of spatial distribution and the behavior of particles in the room. In Proceedings of the 20th Annual Tech. Meeting on Air Cleaning and Contamination Control, Tokyo, Japan, 12–13 April 2002; p. 127. [Google Scholar]
- Shimizu, I.; Kato, F.; Ikeda, K.; Ohashi, Y. A technique for making holograms easily and for measuring simultaneously the behaviour of particles of different sizes and/or shapes. Meas. Sci. Technol. 2004, 15, 656–663. [Google Scholar] [CrossRef]
- Huang, B.; Wang, P.; Ma, S.L. A Detection System of Impurity in Transparent Liquid. Adv. Mater. Res. 2014, 1003, 193–197. [Google Scholar] [CrossRef]
- Diaz, C.A.R.; Leal-Junior, A.; Marques, C.; Frizera, A.; Pontes, M.J.; Antunes, P.F.C.; Andre, P.S.B.; Ribeiro, M.R.N. Optical Fiber Sensing for Sub-Millimeter Liquid-Level Monitoring: A Review. IEEE Sens. J. 2019, 19, 7179–7191. [Google Scholar] [CrossRef]
- Li, X.; Qiao, T.; Pang, Y.; Zhang, H.; Yan, G. A new machine vision real-time detection system for liquid impurities based on dynamic morphological characteristic analysis and machine learning. Measurement 2018, 124, 130–137. [Google Scholar] [CrossRef]
- Zhou, B.; Chen, L.; Wu, L. An Intelligent Foreign Substance Inspection Method for Injection Based on Machine Vision. In Proceedings of the the International Conference on Image, Vision and Intelligent Systems (ICIVIS 2021), Jinan, China, 29–31 July 2022; pp. 781–793. [Google Scholar]
- Cano Marchal, P.; Martínez Gila, D.; Gámez García, J.; Gómez Ortega, J. Expert system based on computer vision to estimate the content of impurities in olive oil samples. J. Food Eng. 2013, 119, 220–228. [Google Scholar] [CrossRef]
- Huo, Y.; Lian, Q.; Yang, S.; Jiang, J. A recurrent video quality enhancement framework with multi-granularity frame-fusion and frame difference based attention. Neurocomputing 2021, 431, 34–46. [Google Scholar] [CrossRef]
- Ju, J.; Xing, J. Moving object detection based on smoothing three frame difference method fused with RPCA. Multimed. Tools Appl. 2019, 78, 29937–29951. [Google Scholar] [CrossRef]
- Zhou, K.; Huang, Y.; Chen, E.; Yuan, R.; Zhang, Z. Real-Time Detection and Spatial Segmentation of Difference Image Motion Changes. IEEE Access 2020, 8, 144931–144944. [Google Scholar] [CrossRef]
- Schmidt, B.E.; Sutton, J.A. High-resolution velocimetry from tracer particle fields using a wavelet-based optical flow method. Exp. Fluids 2019, 60, 1–17. [Google Scholar] [CrossRef]
- Lee, C.; Lee, T.; Nonomura, T.; Asai, K. Evaluating the applicability of a phase-averaged processing of skin-friction field measurement using an optical flow method. J. Vis.-Jpn. 2020, 23, 773–782. [Google Scholar] [CrossRef]
- Song, Z.; Ali, S.; Bouguila, N. Background subtraction using infinite asymmetric Gaussian mixture models with simultaneous feature selection. IET Image Process. 2020, 14, 2321–2332. [Google Scholar] [CrossRef]
- Djerida, A.; Zhao, Z.; Zhao, J. Background subtraction in dynamic scenes using the dynamic principal component analysis. IET Image Process 2020, 14, 245–255. [Google Scholar] [CrossRef]
- Kushwaha, A.; Khare, A.; Prakash, O.; Khare, M. Dense optical flow based background subtraction technique for object segmentation in moving camera environment. IET Image Process 2020, 14, 3393–3404. [Google Scholar] [CrossRef]
- Kanagamalliga, S.; Vasuki, S. Contour-based object tracking in video scenes through optical flow and gabor features. Optik 2018, 157, 787–797. [Google Scholar]
- Shu, J.; Gao, L.H. Improved TLD tracking algorithm using frame difference method and correlation filter. Comput. Eng. Des. 2020, 41, 1694–1700. [Google Scholar] [CrossRef]
- Tang, Y.Y.; Yan, Y.Y.; Liu, Y.A. Rapid flame detection with the application of GMM. Comput. Sci. 2012, 39, 283–285. [Google Scholar]
- Sun, S.M.; Wang, J.H. Implementation of Stepper Motor’s S-Curve Trajectories Control. Appl. Mech. Mater. 2015, 734, 260–263. [Google Scholar] [CrossRef]
- Greggio, N.; Bernardino, A.; Laschi, C.; Dario, P.; Santos-Victor, J. Fast estimation of Gaussian mixture models for image segmentation. Mach. Vis. Appl. 2011, 23, 1–17. [Google Scholar] [CrossRef]
- Nainan, S.; Kulkarni, V. Enhancement in speaker recognition for optimized speech features using GMM, SVM and 1-D CNN. Int. J. Speech Technol. 2021, 24, 809–822. [Google Scholar] [CrossRef]
- Agarwal, M.; Rao, K.K.; Vaidya, K.; Bhattacharya, S. ML-MOC: Machine Learning (kNN and GMM) based Membership determination for Open Clusters. Mon. Not. R. Astron. Soc. 2021, 502, 2582–2599. [Google Scholar] [CrossRef]
- Rathnamala, S.; Jenicka, S. Automated bleeding detection in wireless capsule endoscopy images based on color feature extraction from Gaussian mixture model superpixels. Med. Biol. Eng. Comput. 2021, 59, 969–987. [Google Scholar] [CrossRef]
- Zhang, R.; Gong, W.; Grzeda, V.; Yaworski, A.; Greenspan, M. An Adaptive Learning Rate Method for Improving Adaptability of Background Models. IEEE Signal Proc. Let. 2013, 20, 1266–1269. [Google Scholar] [CrossRef]
- Rong, D.; Wang, H.; Xie, L.; Ying, Y.; Zhang, Y. Impurity detection of juglans using deep learning and machine vision. Comput. Electron. Agric. 2020, 178, 105764. [Google Scholar] [CrossRef]
- Tanjung, J.P.; Muhathir, M. Classification of facial expressions using SVM and HOG. J. Inform. Telecommun. Eng. 2020, 3, 210–215. [Google Scholar] [CrossRef] [Green Version]
- Deore, S.P.; Pravin, A. Histogram of Oriented Gradients Based Off-Line Handwritten Devanagari Characters Recognition Using SVM, K-NN and NN Classifiers. Rev. Intell. Artif. 2019, 33, 441–446. [Google Scholar] [CrossRef] [Green Version]
- Setiawan, A.; Diyasa, I.G.S.M.; Hatta, M.; Puspaningrum, E.Y. Mixture gaussian V2 based microscopic movement detection of human spermatozoa. Int. J. Adv. Intell. Inform. 2020, 6, 210–222. [Google Scholar] [CrossRef]
- Kavitha, K.; Tejaswini, A. VIBE: Background detection and subtraction for image sequences in video. Int. J. Comput. Sci. Inf. Technol. 2012, 3, 5223–5226. [Google Scholar]
- Deng, J.; Sun, W.; Guan, L.; Zhao, N.; Abbasi, Q.H. Noninvasive Suspicious Liquid Detection Using Wireless Signals. Sensors 2019, 19, 4086. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Ji, L.; Lin, M.; Jiang, W.; Cao, G.; Xu, Z.; Hao, F. An improved rock typing method for tight sandstone based on new rock typing indexes and the weighted fuzzy kNN algorithm. J. Petrol. Sci. Eng. 2022, 210, 109956. [Google Scholar] [CrossRef]
- Abu Alfeilat, H.A.; Hassanat, A.B.; Lasassmeh, O.; Tarawneh, A.S.; Alhasanat, M.B.; Eyal Salman, H.S.; Prasath, V.S. Effects of distance measure choice on k-nearest neighbor classifier performance: A review. Big Data 2019, 7, 221–248. [Google Scholar] [CrossRef] [Green Version]
- Wu, D.; Wu, Q.; Yin, X.; Jiang, B.; Wang, H.; He, D.; Song, H. Lameness detection of dairy cows based on the YOLOv3 deep learning algorithm and a relative step size characteristic vector. Biosyst. Eng. 2020, 189, 150–163. [Google Scholar] [CrossRef]
- Lawal, M.O. Tomato detection based on modified YOLOv3 framework. Sci. Rep. 2021, 11, 1–11. [Google Scholar]
- Knapp, J.Z.; Abramson, L.R. Automated particulate inspection systems: Strategies and implications. PDA J. Pharm. Sci. Technol. 1990, 44, 74. [Google Scholar]
- Wang, Y.; Zhou, B.; Zhang, H.; Ge, J. A vision-based intelligent inspector for wine production. Int. J. Mach. Learn. Cybern. 2012, 3, 193–203. [Google Scholar] [CrossRef]
- Wang, Y.; Ge, J.; Zhang, H.; Zhou, B. Intelligent injection liquid particle inspection machine based on two-dimensional Tsallis Entropy with modified pulse-coupled neural networks. Eng. Appl. Artif. Intel. 2011, 24, 625–637. [Google Scholar] [CrossRef]
- Mahfouf, Z.; Merouani, H.F.; Bouchrika, I.; Harrati, N. Investigating the use of motion-based features from optical flow for gait recognition. Neurocomputing 2018, 283, 140–149. [Google Scholar] [CrossRef]
- Zhou, B.; Wang, Y.; Ge, J.; Zhang, H. A machine vision intelligent inspector for injection. In Proceedings of the IEEE Pacific-Asia Workshop on Computational Intelligence and Industrial Application, Wuhan, China, 19–20 December 2008; pp. 511–516. [Google Scholar]
- Barnich, O.; Van Droogenbroeck, M. ViBe: A Universal Background Subtraction Algorithm for Video Sequences. IEEE Trans. Image Process 2011, 20, 1709–1724. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Stauffer, C.; Grimson, W.E.L. Adaptive background mixture models for real-time tracking. In Proceedings of the IEEE Computer Society Conference on Computer Vision and Pattern Recognition (Cat. No PR00149), Fort Collins, CO, USA, 23–25 June 1999; pp. 246–252. [Google Scholar]
- Huang, B.; Ma, S.; Lv, Y.; Liu, C.; Zhang, H. The study of detecting method for impurity in transparent liquid. Optik 2014, 125, 499–503. [Google Scholar] [CrossRef]
- Ge, J.; Wang, Y.; Zhou, B.; Zhang, H. Intelligent Foreign Particle Inspection Machine for Injection Liquid Examination Based on Modified Pulse-Coupled Neural Networks. Sensors 2009, 9, 3386–3404. [Google Scholar] [CrossRef] [Green Version]
























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Device | Parameter | Value |
|---|---|---|
| Industrial Camera | Pixel size | 4.8 μm × 4.8 μm |
| Resolution | 2592 × 2048 | |
| Sensor type | CMOS | |
| Sensor area (V × H × D/mm) | 1″ | |
| Exposure | 59 μs~10 s | |
| Gain | 0 dB~15 dB | |
| Communication interface | USB3.0 | |
| Signal to noise ratio (SNR) | 39.5 dB | |
| Optical Lens | Focus | 16 mm |
| Aperture | F1.6~F16 | |
| Working distance | 0.1 m~∞ | |
| Optical interface | C-Mount | |
| Angle of view | 53.4° × 43.3° × 33.4° |
| Algorithms | FPS | |||
|---|---|---|---|---|
| Traditional GMM | 86.9 | 94.5 | 90.5 | 46 |
| Frame Difference Method | 93.7 | 68.3 | 79.0 | 217 |
| Literature [35] | 85.3 | 93.8 | 89.3 | 72 |
| Literature [36] | 63.7 | 92.9 | 75.6 | 84 |
| Method of this paper | 96.6 | 95.2 | 95.9 | 198 |
| Algorithms | FPS | |
|---|---|---|
| KNN | 94.3 | 53 |
| YOLOv3 | 96.0 | 157 |
| Method of this paper | 96.4 | 184 |
| Impurity Type | Method of This Paper | Manual Lamp Inspection | |||
|---|---|---|---|---|---|
| False Detection Rate (%) | Missing Detection Rate (%) | False Detection Rate (%) | Missing Detection Rate (%) | ||
| Black Impurities | Hairs | 2.4 | 0.4 | 5.3 | 1 |
| Mosquitoes | 2 | 0.3 | 4.7 | 0.5 | |
| Black scum | 2.6 | 0.8 | 5.8 | 2 | |
| White Impurities | Glass chips | 3.4 | 0.9 | 6.2 | 2.1 |
| Fibres | 3.1 | 1.2 | 5.5 | 2.8 | |
| Number of Experiments | Detection Method | |
|---|---|---|
| Method of This Paper | Manual Lamp Inspection | |
| 1 | 9, 18, 57, 86 | 9, 18, 57, 86 |
| 2 | 9, 18, 57, 86 | 18, 57, 86 |
| 3 | 9, 18, 57, 86 | 18, 40, 57, 86 |
| 4 | 9, 18, 57, 86 | 9, 18, 57, 86 |
| 5 | 9, 18, 57, 86 | 57, 86 |
| 6 | 9, 18, 57, 86 | 9, 18, 57, 86 |
| 7 | 18, 57, 86 | 9, 18, 57, 86 |
| 8 | 9, 18, 57, 86 | 9, 18, 57, 86 |
| 9 | 9, 18, 57, 86 | 18, 57, 86 |
| 10 | 9, 18, 57, 86 | 9, 18, 57, 86 |
| Group | Average Time Spent on Manual Inspection | The Average Time Is Taken to Test This Paper | |
|---|---|---|---|
| 1 | 2.5 | 0.5 | 2 |
| 2 | 3 | 0.6 | 2.4 |
| 3 | 3.5 | 0.4 | 3.1 |
| 4 | 4 | 0.6 | 3.4 |
| 5 | 2.8 | 0.3 | 2.5 |
| 6 | 3.3 | 0.5 | 2.8 |
| Average | 3.2 | 0.5 | 2.7 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Shi, X.; Tang, Z.; Wang, Y.; Xie, H.; Xu, L. HOG-SVM Impurity Detection Method for Chinese Liquor (Baijiu) Based on Adaptive GMM Fusion Frame Difference. Foods 2022, 11, 1444. https://doi.org/10.3390/foods11101444
Shi X, Tang Z, Wang Y, Xie H, Xu L. HOG-SVM Impurity Detection Method for Chinese Liquor (Baijiu) Based on Adaptive GMM Fusion Frame Difference. Foods. 2022; 11(10):1444. https://doi.org/10.3390/foods11101444
Chicago/Turabian StyleShi, Xiaoshi, Zuoliang Tang, Yihan Wang, Hong Xie, and Lijia Xu. 2022. "HOG-SVM Impurity Detection Method for Chinese Liquor (Baijiu) Based on Adaptive GMM Fusion Frame Difference" Foods 11, no. 10: 1444. https://doi.org/10.3390/foods11101444