Camouflage Target Recognition Based on Dimension Reduction Analysis of Hyperspectral Image Regions


Abstract
:1. Introduction
2. Materials and Methods
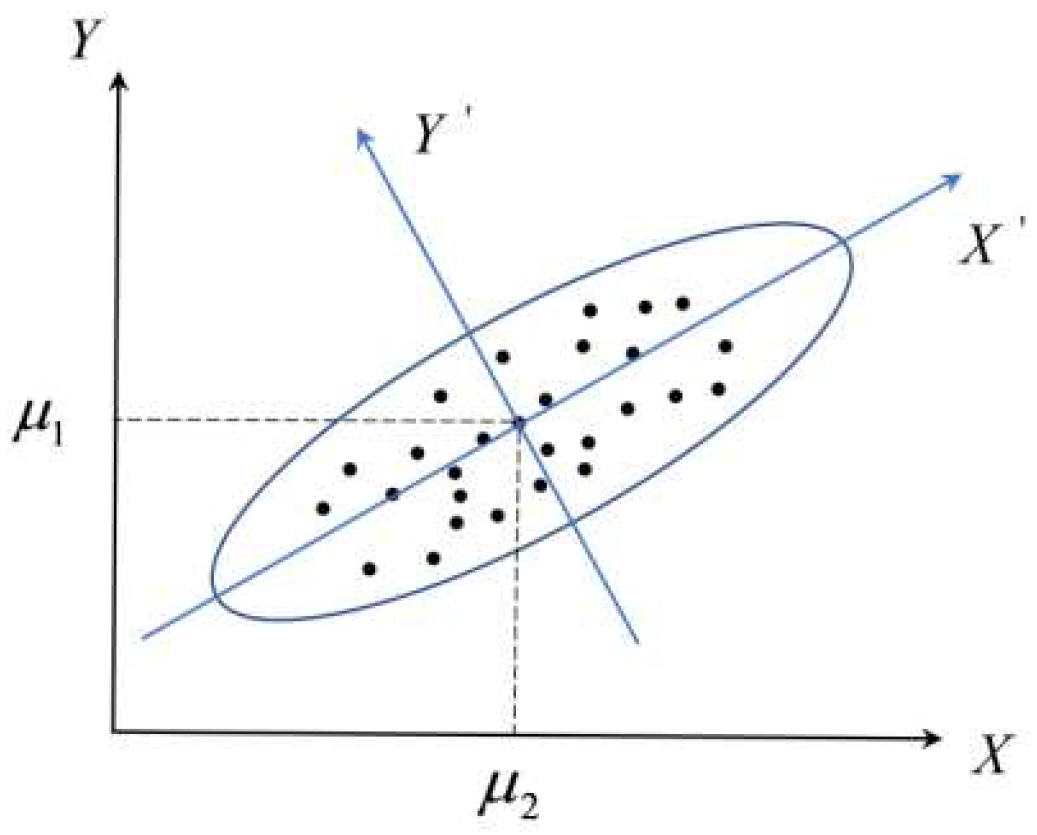
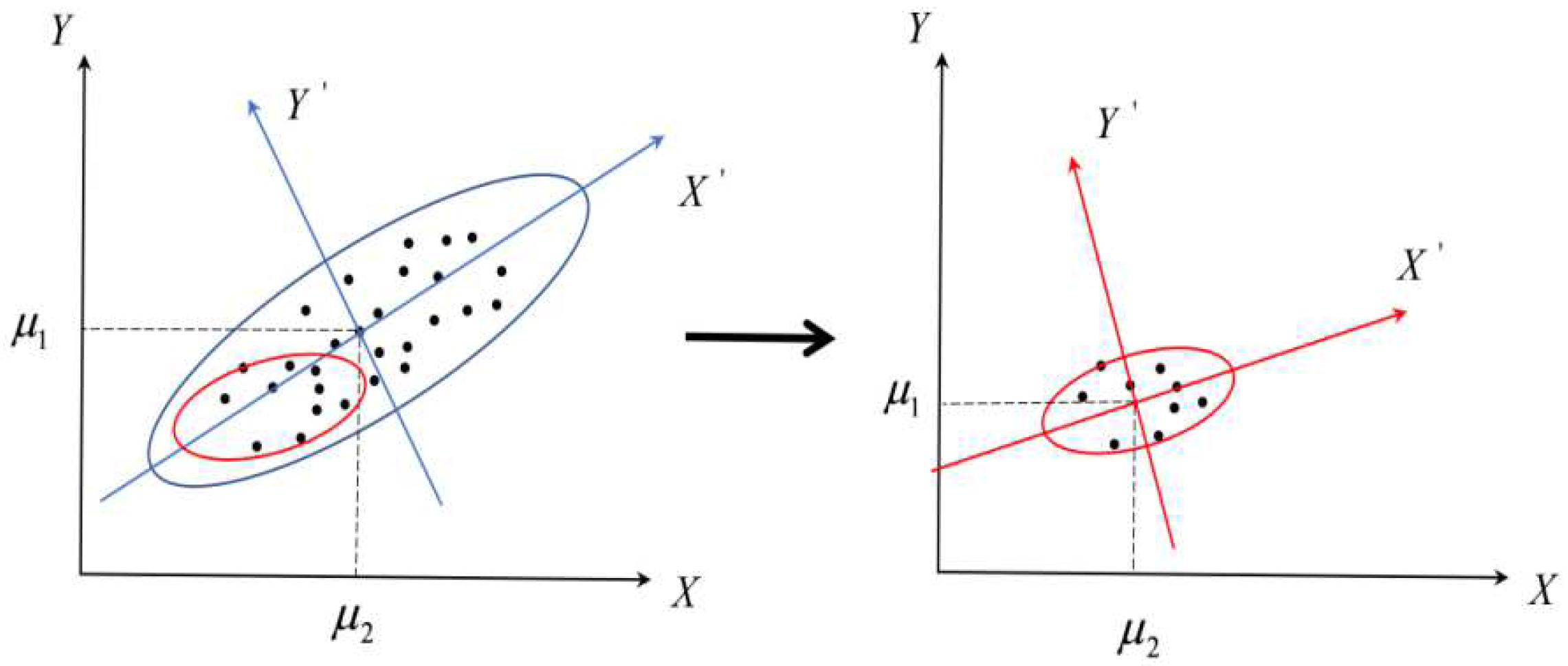
2.1. Data Dimensionality Reduction and Principal Component Analysis
2.2. Target Detection Technology
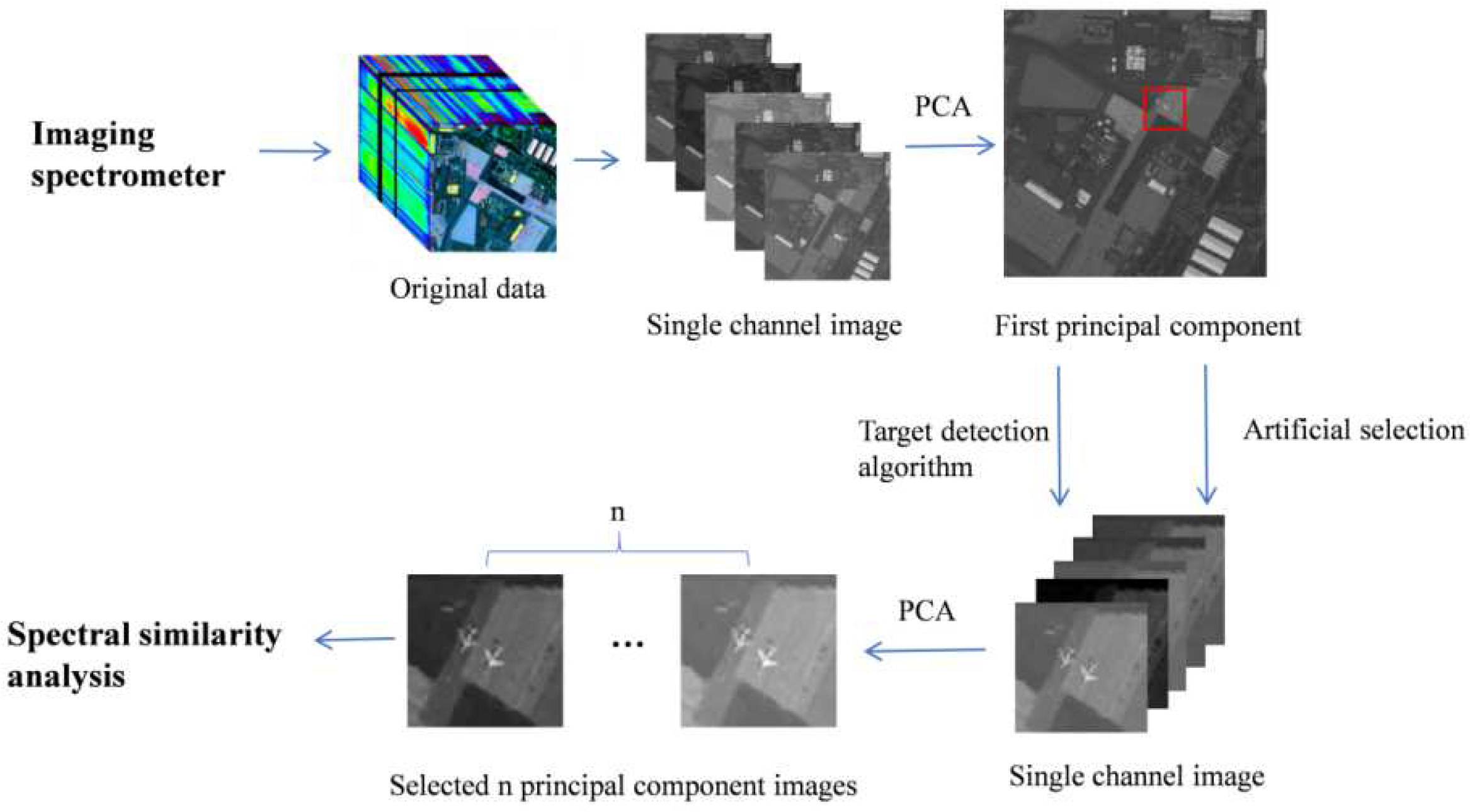
2.3. Method
3. Experimental Results and Analysis
3.1. Data Preparation
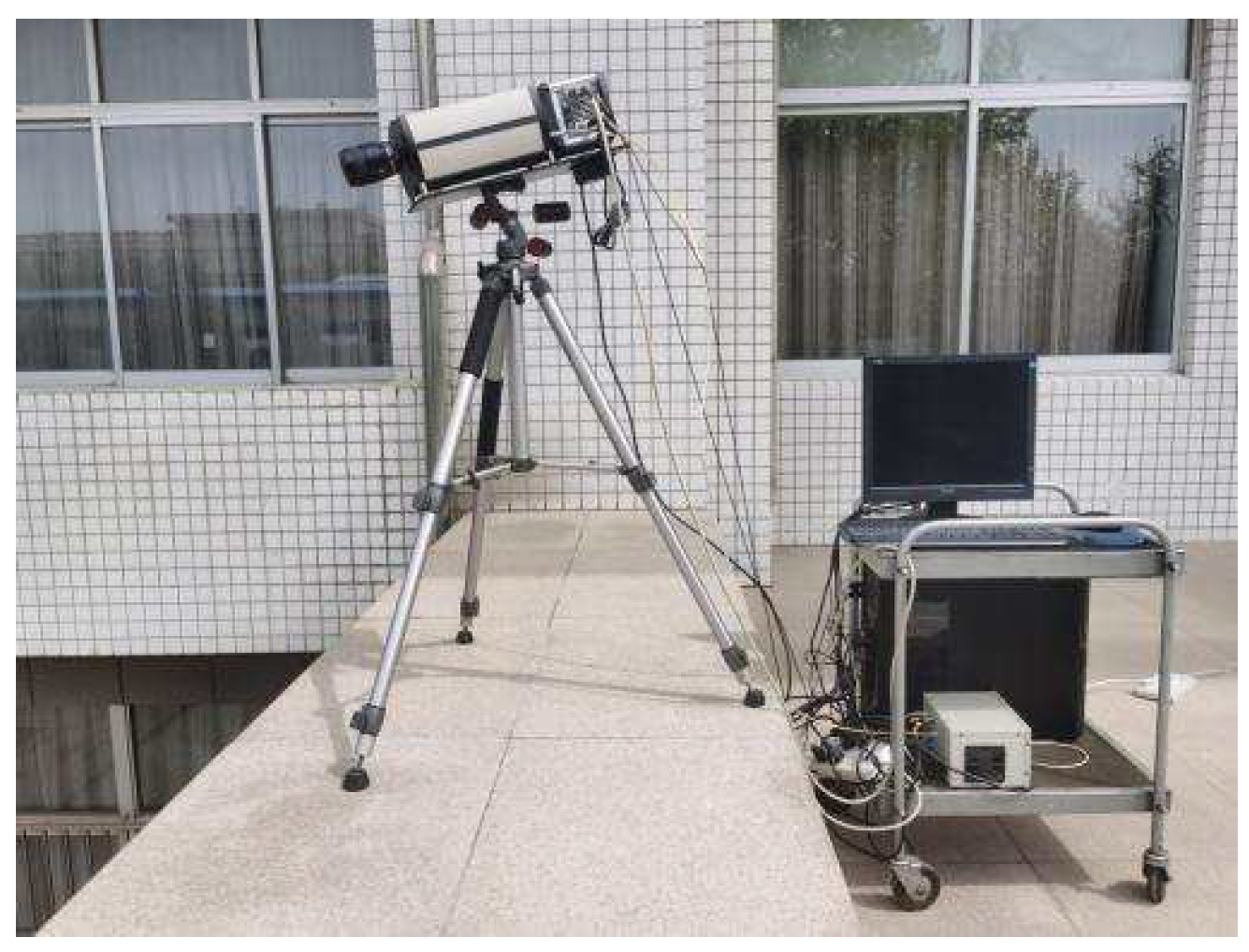
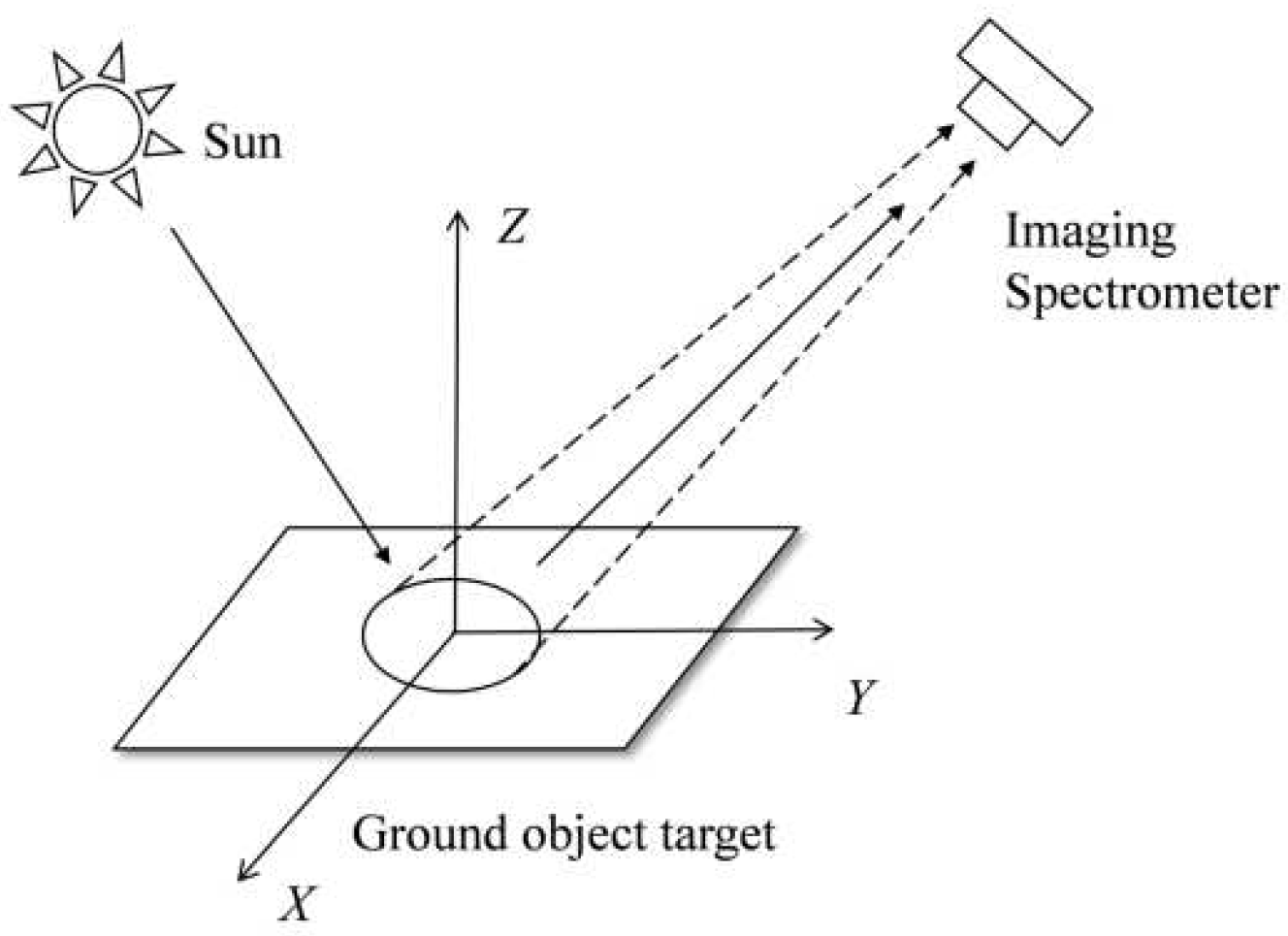
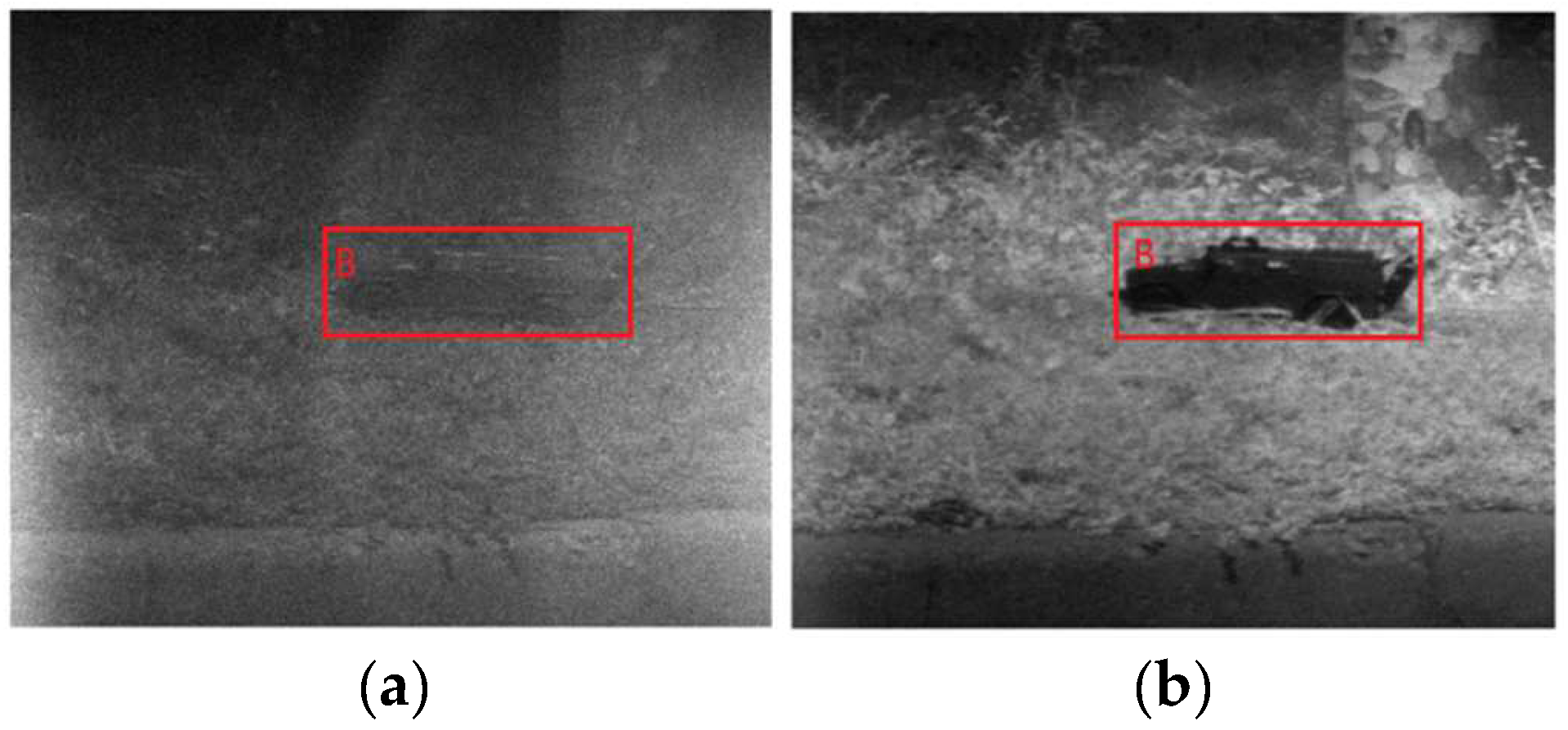
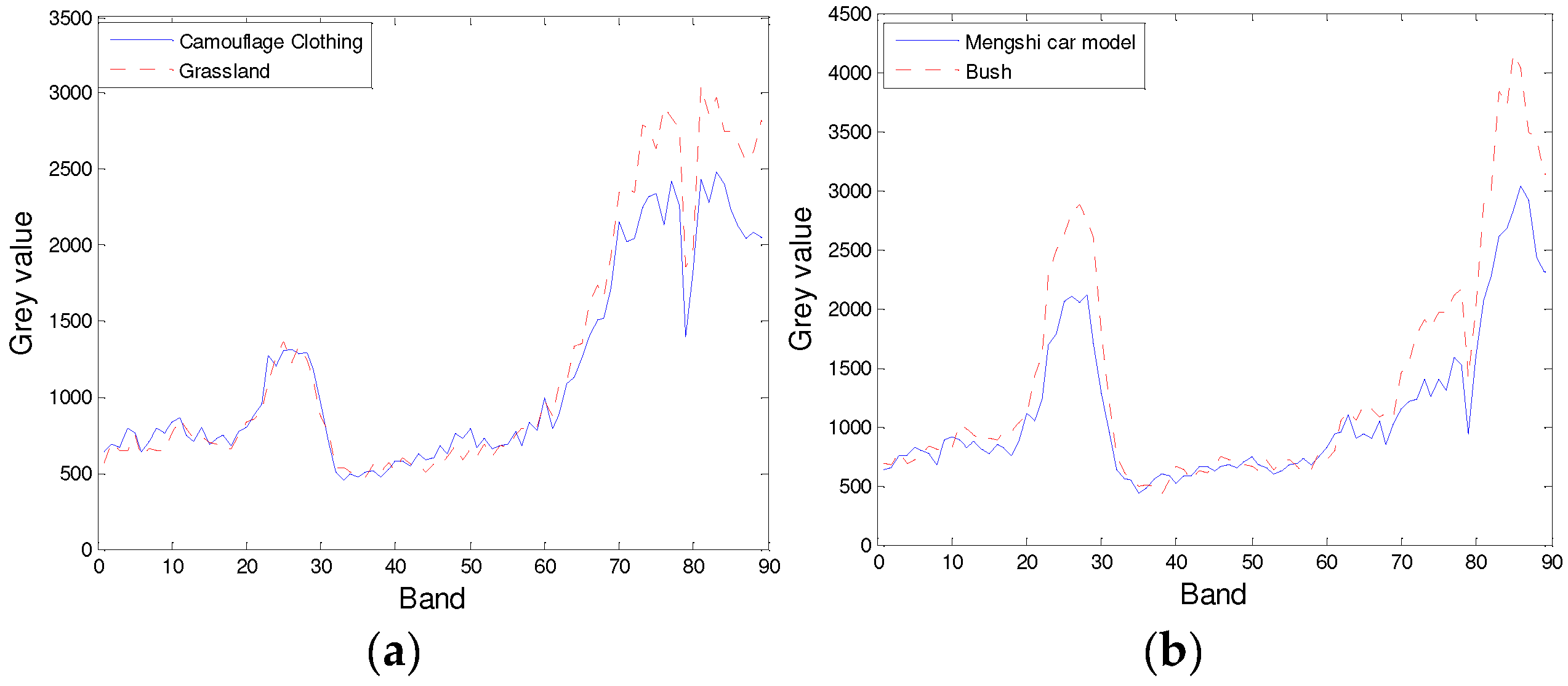
3.1.1. Acquisition of Hyperspectral Images
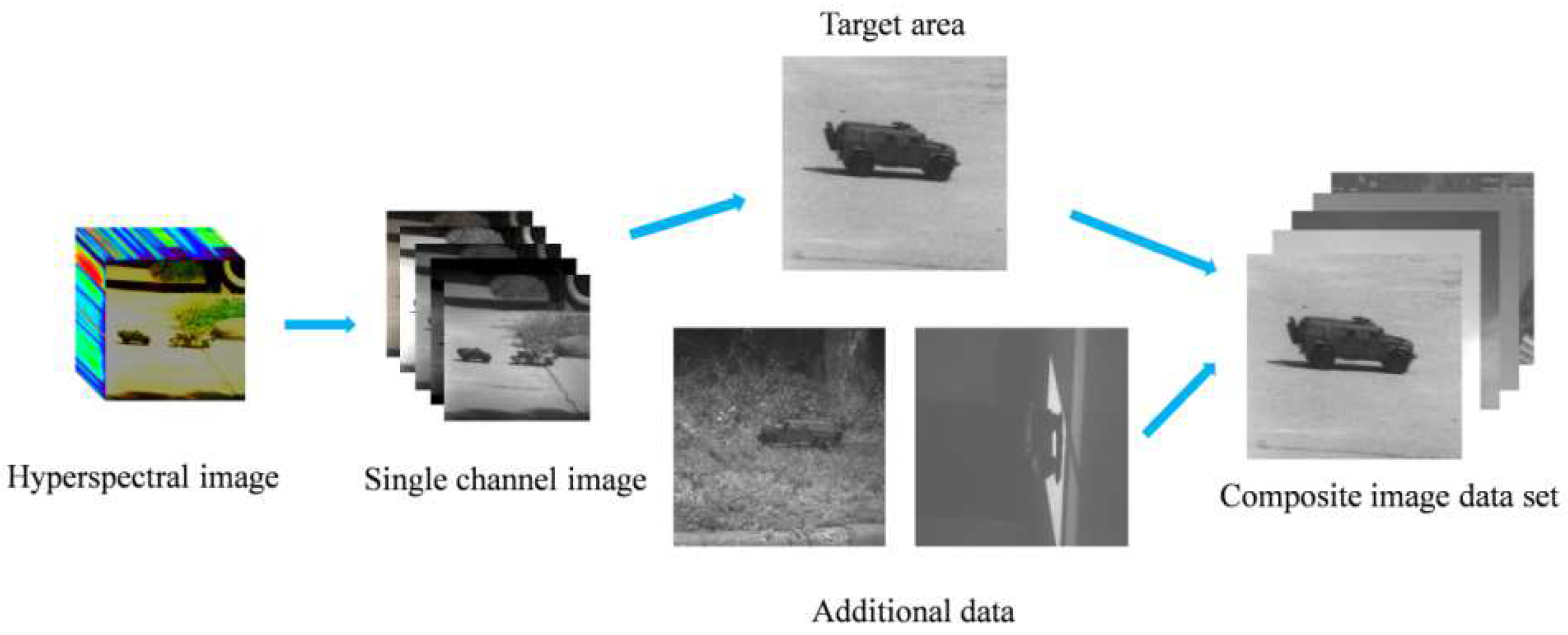
3.1.2. Data Expansion and Model Training
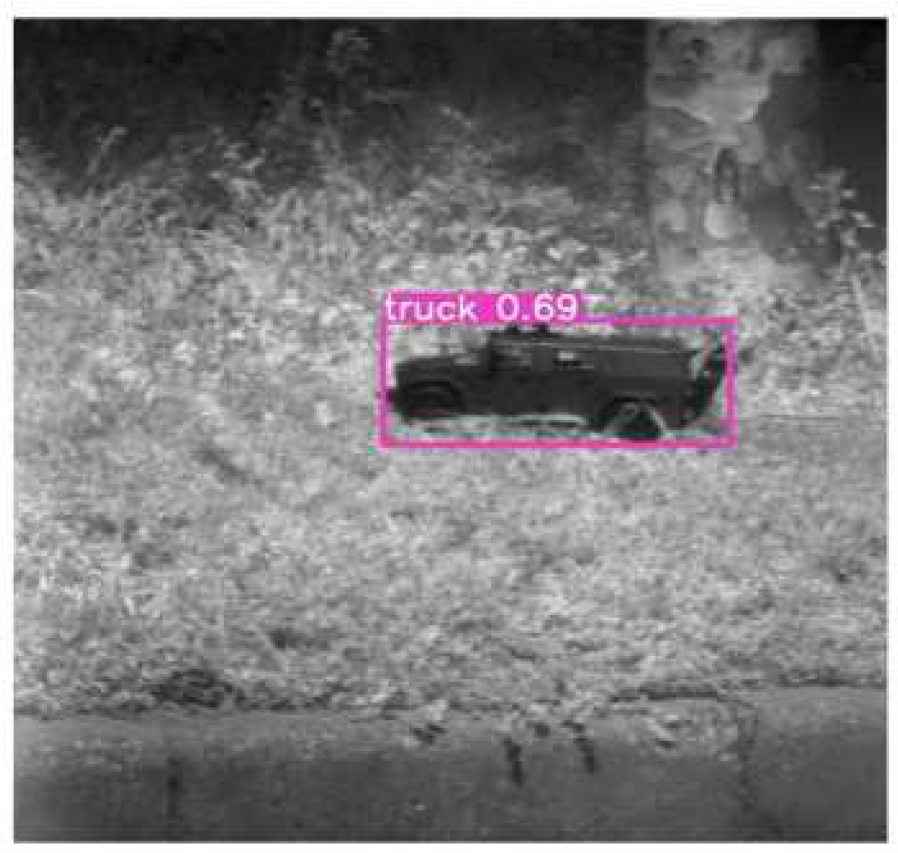
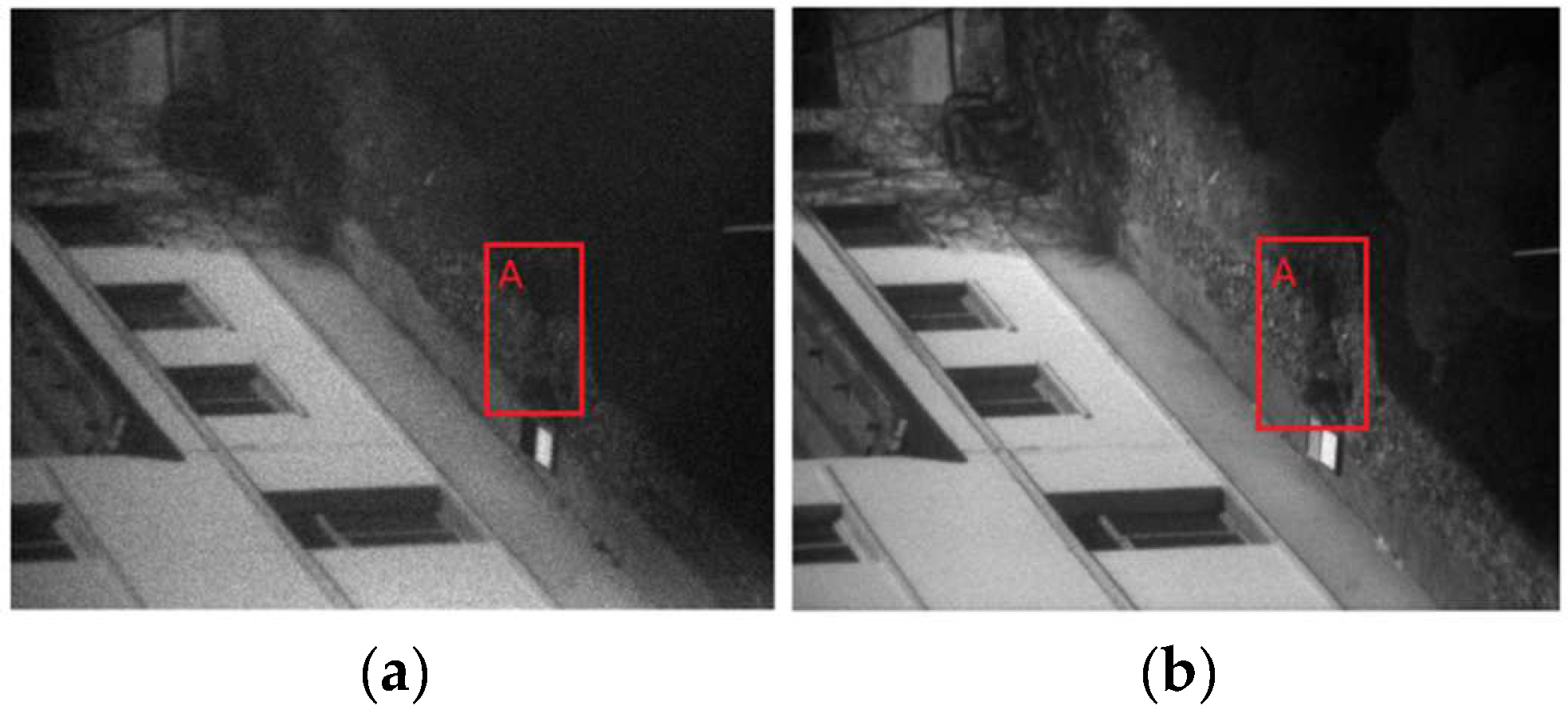
3.2. Further Experiment
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Khan, M.J.; Khan, H.S.; Yousaf, A.; Khurshid, K.; Abbas, A. Modern trends in hyperspectral image analysis: A review. IEEE Access 2018, 6, 14118–14129. [Google Scholar] [CrossRef]
- Kruse, F.A.; Perry, S.L.; Caballero, A. District-level mineral survey using airborne hyperspectral data, los menucos, argentina. Ann. Geophys. 2006, 49, 83–92. [Google Scholar]
- Ang, L.M.; Seng, J.K.P. Big data and machine learning with hyperspectral information in agriculture. IEEE Access 2021, 9, 36699–36718. [Google Scholar] [CrossRef]
- Kumar, V.; Ghosh, J.K. Camouflage Detection Using MWIR Hyperspectral Images. J. Indian Soc. Remote Sens. 2017, 45, 139–145. [Google Scholar] [CrossRef]
- Yan, Y.; Hua, W.H.; Zhang, Y.; Cui, Z.H.; Wu, X.S.; Liu, X. Characteristic analysis of visible near infrared hyperspectral camouflage target. Infrared Technol. 2019, 41, 171–175. [Google Scholar]
- Shen, Y.; Li, J.; Lin, W.; Chen, L.; Huang, F.; Wang, S. Camouflaged Target Detection Based on Snapshot Multispectral Imaging. Remote Sens. 2021, 13, 3949. [Google Scholar] [CrossRef]
- Ettabaa, K.S.; Salem, M.B. Adaptive progressive band selection for dimensionality reduction in hyperspectral images. J. Indian Soc. Remote Sens. 2018, 46, 157–167. [Google Scholar] [CrossRef]
- Uddin, M.P.; Al Mamun, M.A.; Hossain, M.A. PCA-based feature reduction for hyperspectral remote sensing image classification. IETE Tech. Rev. 2020, 38, 377–396. [Google Scholar] [CrossRef]
- Li, Y.K.; Chu, L.; Zhang, Y.; Guo, C.; Fu, Z.; Gao, J.B. Intelligent transportation video tracking technology based on computer and image processing technology. J. Intell. Fuzzy Syst. 2019, 37, 3347–3356. [Google Scholar] [CrossRef]
- Karmakar, G.; Chowdhury, A.; Das, R.; Kamruzzaman, J.; Islam, S. Assessing trust level of a driverless car using deep learning. IEEE Trans. Intell. Transp. Syst. 2021, 22, 4457–4466. [Google Scholar] [CrossRef]
- Ren, S.Q.; He, K.M.; Girshick, R.; Sun, J. Faster r-cnn: Towards real-time object detection with region proposal networks. IEEE Trans. Pattern Anal. Mach. Intell. 2017, 39, 1137–1149. [Google Scholar] [CrossRef] [PubMed]
- Li, W.; Chen, C.; Zhang, M.M.; Li, H.C.; Du, Q. Data augmentation for hyperspectral image classification with deep cnn. IEEE Geosci. Remote Sens. Lett. 2019, 16, 593–597. [Google Scholar] [CrossRef]
- Chang, C.I.; Heinz, D.C. Constrained subpixel target detection for remotely sensed imagery. IEEE Trans. Geosci. Remote Sens. 2000, 38, 1144–1159. [Google Scholar] [CrossRef]
- Varmuza, K.; Karlovits, M.; Demuth, W. Spectral similarity versus structural similarity: Infrared spectroscopy. Anal. Chim. Acta. 2003, 490, 313–324. [Google Scholar] [CrossRef]

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Based on Raw Image Data | The Whole Image after PCA | The Area to Be Measured after PCA | |
|---|---|---|---|
| SAM | 0.1151 | 0.3501 | 0.8393 |
| RMSE | 247.170 | 890.171 | 2169.599 |
| Based on Raw Image Data | The Whole Image after PCA | The Area to Be Measured after PCA | |
|---|---|---|---|
| SAM | 0.1255 | 0.4258 | 0.9107 |
| RMSE | 268.503 | 951.987 | 2387.971 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhao, J.; Zhou, B.; Wang, G.; Liu, J.; Ying, J. Camouflage Target Recognition Based on Dimension Reduction Analysis of Hyperspectral Image Regions. Photonics 2022, 9, 640. https://doi.org/10.3390/photonics9090640
Zhao J, Zhou B, Wang G, Liu J, Ying J. Camouflage Target Recognition Based on Dimension Reduction Analysis of Hyperspectral Image Regions. Photonics. 2022; 9(9):640. https://doi.org/10.3390/photonics9090640
Chicago/Turabian StyleZhao, Jiale, Bing Zhou, Guanglong Wang, Jie Liu, and Jiaju Ying. 2022. "Camouflage Target Recognition Based on Dimension Reduction Analysis of Hyperspectral Image Regions" Photonics 9, no. 9: 640. https://doi.org/10.3390/photonics9090640