Step Surface Profile Measurement Based on Fringe Projection Phase-Shifting Using Selective Sampling


Abstract
:1. Introduction
2. Phase-Shifting Concept
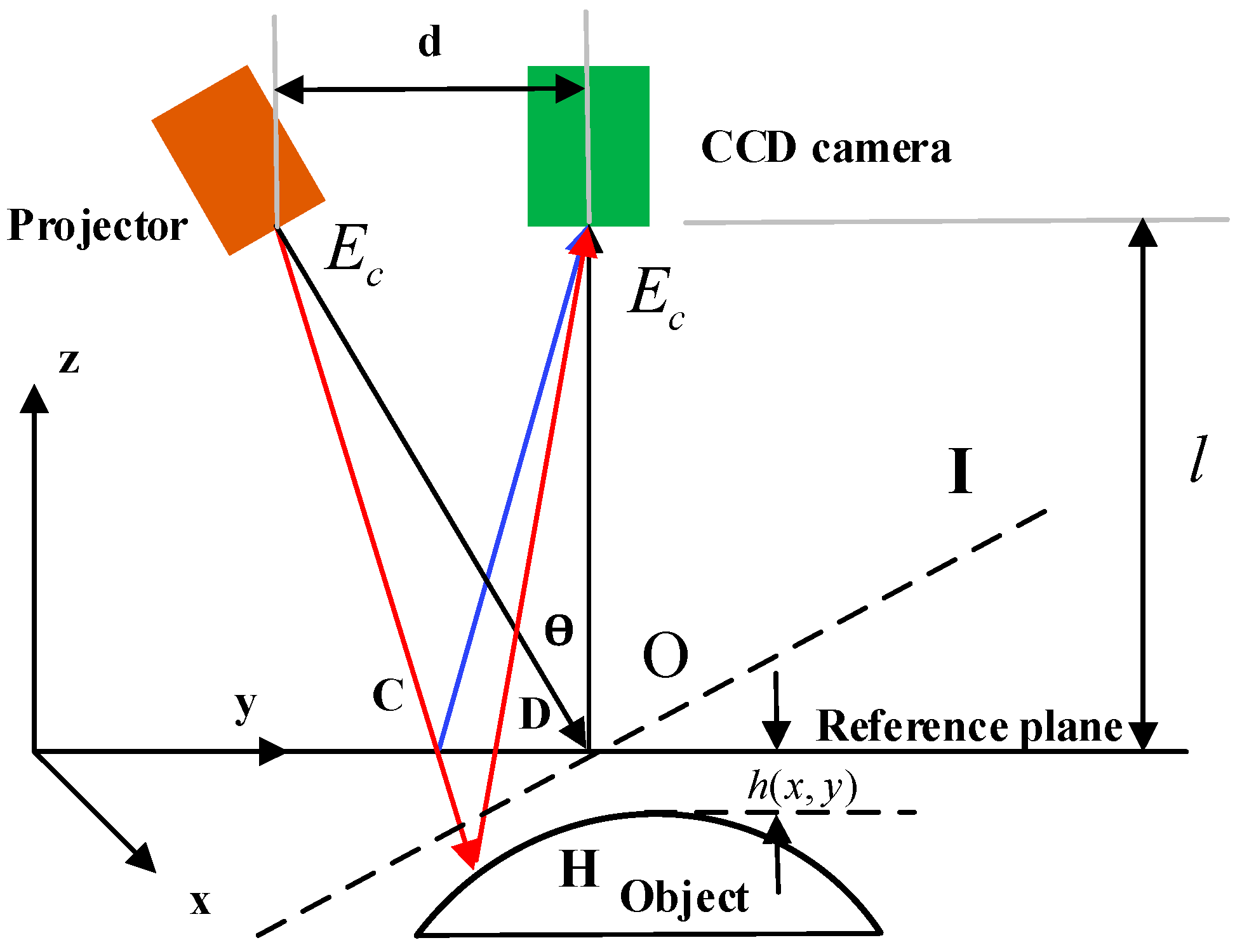
2.1. Basic Principle of Frequency Conversion Phase Shifting
2.2. Frequency-Shifted Phase Shifting Extraction Algorithm Based on Selection Sampling
3. Experiment Based on Selective Sampling
4. Experimental Methods
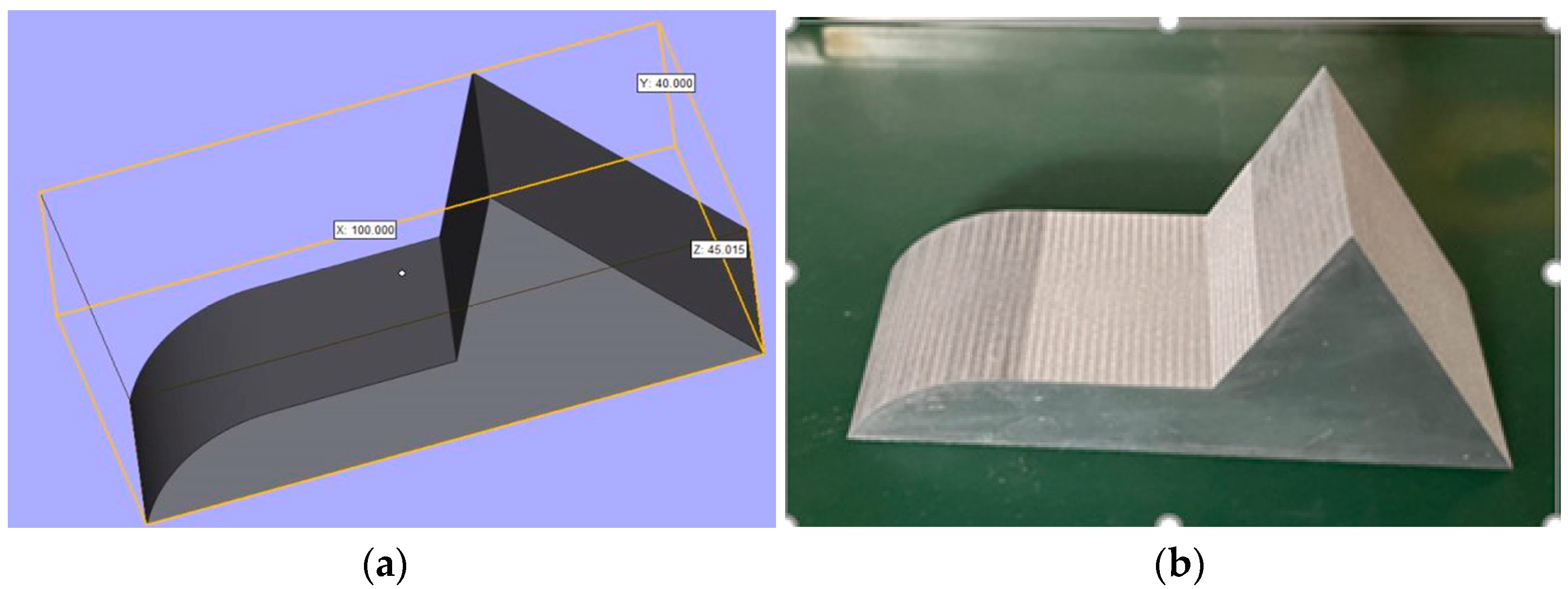
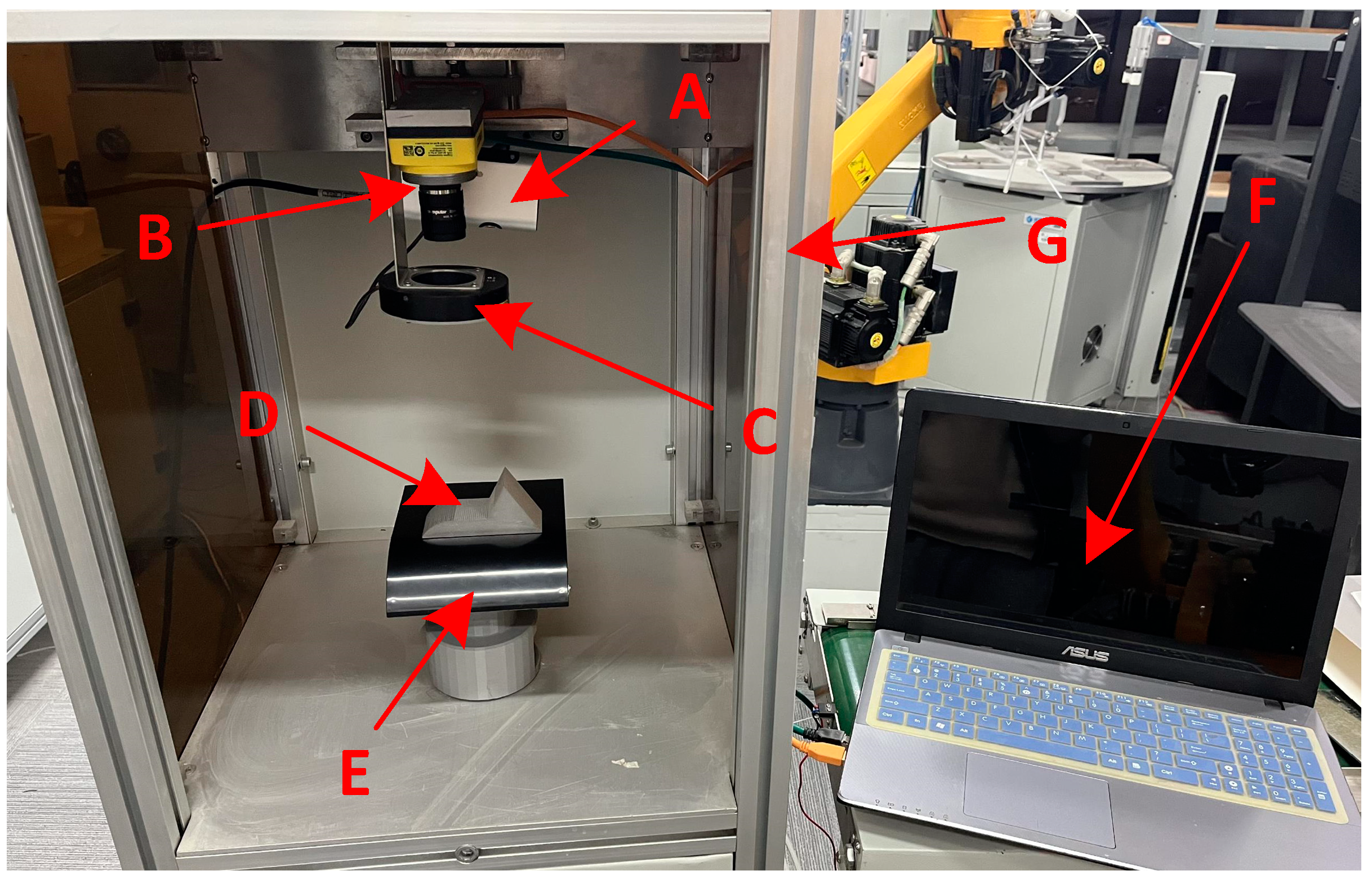
4.1. Measured Part and Experimental Setup for Fringe Projection
- (1)
- The phase-shifted fringe image with different phase shifts is obtained from the measured surface, and both have a random error with a mean of 0 and a variance of 0.01.
- (2)
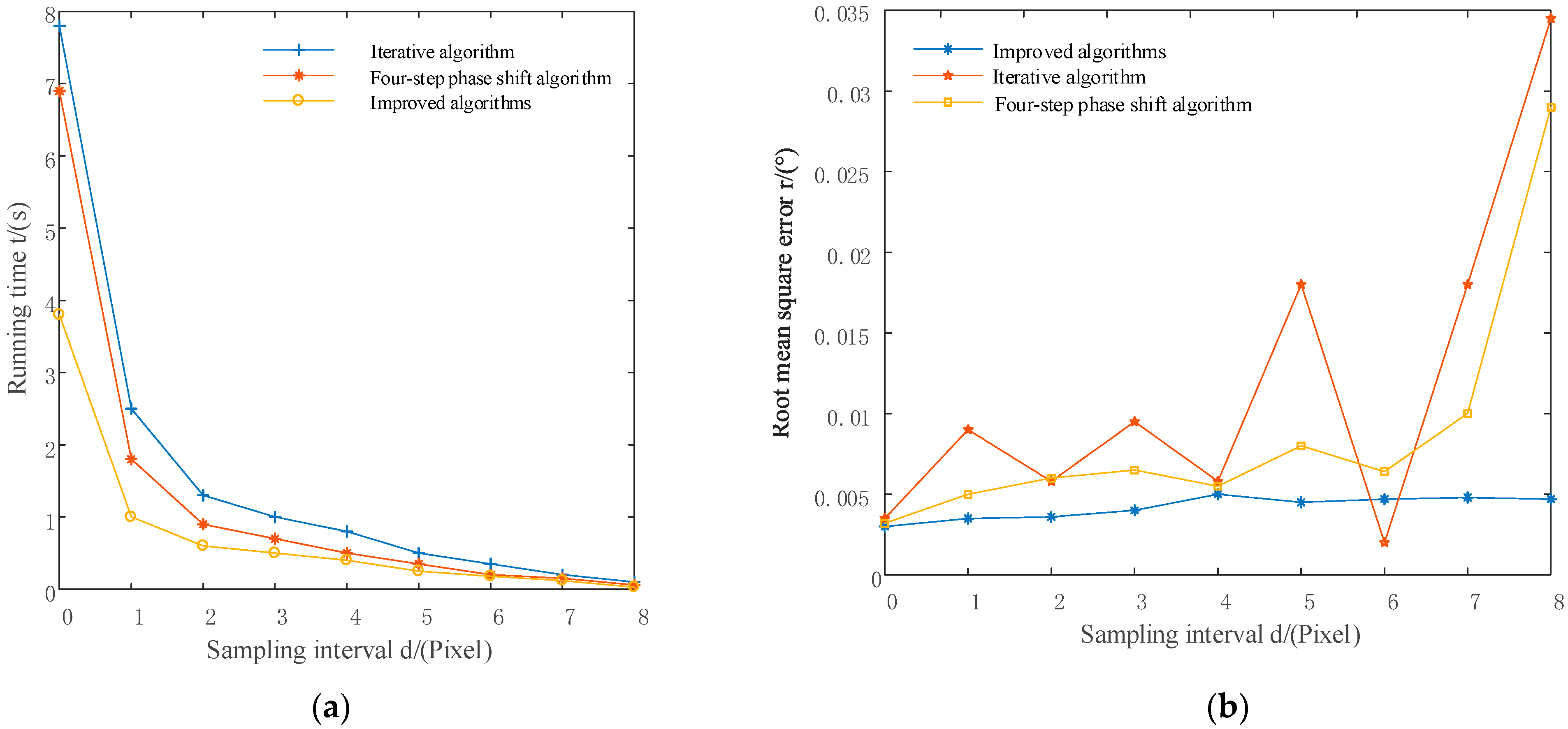
- Solving the measured phase by using an iterative algorithm, a four-step phase-shift algorithm, and a variable frequency phase-shifting extraction algorithm based on selective sampling.
- (3)
- The package phase was unwrapped to obtain the measured surface for experimental analysis.
4.2. Measurement System Calibration
- i.
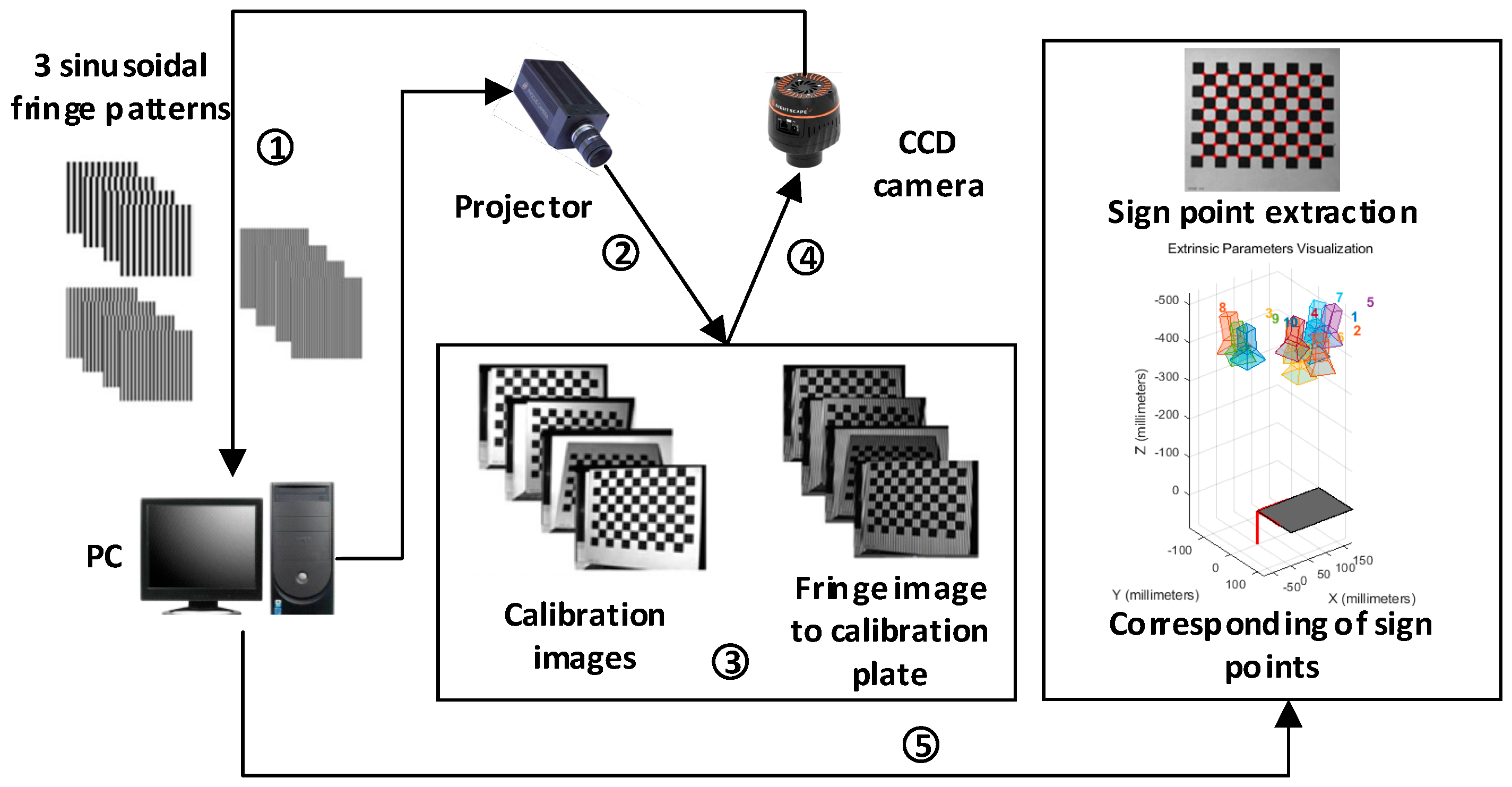
- This experiment uses a multifrequency heterodyne method [34] for system calibration. Three types of sinusoidal fringe input projectors with fringe frequencies meeting the requirements of multifrequency heterodynes are designed by the PC, and the sinusoidal fringe frequencies are 1/70, 1/64, and 1/59. The phase-shifting method is four-step phase-shifting, and a total of 12 sinusoidal fringe patterns are used, as shown in ① in Figure 6.
- ii.
- Before the experiment, the stripe pattern is loaded into the projector. The calibration plate is placed within the field of view of the camera and the projector, the position of the calibration plate remains unchanged, and the image of the calibration plate and the striped image after continuously projecting 12 stripe patterns is taken, as shown in ② in Figure 6.
- iii.
- The position of the calibration plate and repeat step is changed (2) until enough calibration images are obtained, as shown in ③ and ④ in Figure 6. At least three groups of data are needed to complete the calibration process. Generally, 10–20 groups of calibration patterns can achieve a high calibration accuracy and meet the calibration requirements. To obtain more accurate experimental results, 18 groups of calibration images are used for calibration in this paper.
- iv.
- The collected images are input into the computer, the image processing operations such as filtering and denoising are performed, the checkerboard calibration board feature points are extracted from the image at each position [35], the phase value is extracted from the feature points, as shown in ⑤ in Figure 6, and the 3D image corresponding to the feature points is extracted after the camera coordinates and other operations are calibrated. According to the camera calibration results, the depth coordinate corresponding to each feature point is obtained, and the camera calibration adopts the calibration method proposed by Liu [36].
- v.
- Obtain the pixel coordinates , the absolute phase value , and the depth coordinate . Perform least-squares nonlinear parameter fitting, obtain the required parameters for system calibration, and complete the system calibration.
5. Experimental Results
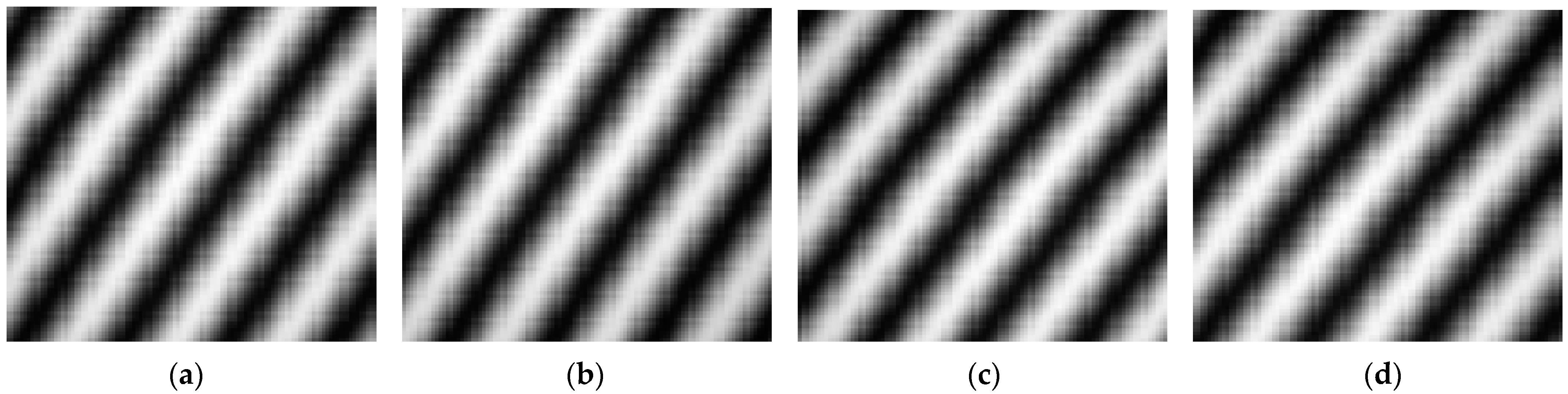
5.1. Fringe Pattern with an Arbitrary Value of Phase Shifting
5.2. Iterative Algorithm with a Phase-Shifting of π/2
5.3. Four-Step Phase-Shifting Algorithm with a Phase-Shifting of π/2
5.4. Frequency-Shifted Phase-Shifting Extraction Algorithm Based on Selective Sampling for Solving the Measured Phase
6. Discussion and Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Ordones, S.; Servin, M.; Kang, J.S. Moire profilometry through simultaneous dual fringe projection for accurate phase demodulation: A comparative study. Appl. Opt. 2021, 60, 8667–8675. [Google Scholar] [CrossRef]
- Dickins, A.; Widjanarko, T.; Sims-Waterhouse, D.; Thompson, A.; Lawes, S.; Senin, N.; Leach, R. Multi-view fringe projection system for surface topography measurement during metal powder bed fusion. JOSA A 2020, 37, B93–B105. [Google Scholar] [CrossRef]
- Zhang, S. Recent progresses on real-time 3D shape measurement using digital fringe projection techniques. Opt. Lasers Eng. 2010, 48, 149–158. [Google Scholar] [CrossRef]
- Zhang, S.; Van Der Weide, D.; Oliver, J. Superfast phase-shifting method for 3-D shape measurement. Opt. Express 2010, 18, 9684–9689. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Su, X.; Chen, W.; Zhang, Q.; Chao, Y. Dynamic 3-D shape measurement method based on FTP. Opt. Lasers Eng. 2001, 36, 49–64. [Google Scholar] [CrossRef]
- Lai, G.; Yatagai, T. Generalized phase-shifting interferometry. JOSA A 1991, 8, 822–827. [Google Scholar] [CrossRef]
- Cheng, Y.-Y.; Wyant, J.C. Phase shifter calibration in phase-shifting interferometry. Appl. Opt. 1985, 24, 3049–3052. [Google Scholar] [CrossRef]
- Quan, C.; Tay, C.J.; Kang, X.; He, X.Y.; Shang, H.M. Shape measurement by use of liquid-crystal display fringe projection with two-step phase shifting. Appl. Opt. 2003, 42, 2329–2335. [Google Scholar] [CrossRef]
- Huang, P.S.; Zhang, S. Fast three-step phase-shifting algorithm. Appl. Opt. 2006, 45, 5086–5091. [Google Scholar] [CrossRef]
- Remmersmann, C.; Stürwald, S.; Kemper, B.; Langehanenberg, P.; von Bally, G. Phase noise optimization in temporal phase-shifting digital holography with partial coherence light sources and its application in quantitative cell imaging. Appl. Opt. 2009, 48, 1463–1472. [Google Scholar] [CrossRef]
- Zuo, C.; Feng, S.; Huang, L.; Tao, T.; Yin, W.; Chen, Q. Phase shifting algorithms for fringe projection profilometry: A review. Opt. Lasers Eng. 2018, 109, 23–59. [Google Scholar] [CrossRef]
- Xu, J.; Zhang, S. Status, challenges, and future perspectives of fringe projection profilometry. Opt. Lasers Eng. 2020, 135, 106193. [Google Scholar] [CrossRef]
- Tonelli, L.; Fortunato, A.; Ceschini, L. CoCr alloy processed by Selective Laser Melting (SLM): Effect of Laser Energy Density on microstructure, surface morphology, and hardness. J. Manuf. Process. 2020, 52, 106–119. [Google Scholar] [CrossRef]
- Gao, T.; Zhang, X.; Li, C.; Zhang, Y.; Yang, M.; Jia, D.; Ji, H.; Zhao, Y.; Li, R.; Yao, P. Surface morphology evaluation of multi-angle 2D ultrasonic vibration integrated with nanofluid minimum quantity lubrication grinding. J. Manuf. Process. 2020, 51, 44–61. [Google Scholar] [CrossRef]
- Hongbei, W.; Xiaoqian, C.; Yuanbo, L.; Mengge, Z.; Shuhua, L.; Guangnan, L.; Hongbin, D. Measurement of the surface morphology of plasma facing components on the EAST tokamak by a laser speckle interferometry approach. Plasma Sci. Technol. 2018, 20, 035602. [Google Scholar]
- Tahara, T.; Kozawa, Y.; Ishii, A.; Wakunami, K.; Ichihashi, Y.; Oi, R. Two-step phase-shifting interferometry for self-interference digital holography. Opt. Lett. 2021, 46, 669–672. [Google Scholar] [CrossRef]
- Wang, Y.; Zhang, F.; Tang, X.; Chen, X.; Chen, Y.; Huang, W.; Liang, Z.; Wu, L.; Ge, Y.; Song, Y. All-optical phosphorene phase modulator with enhanced stability under ambient conditions. Laser Photonics Rev. 2018, 12, 1800016. [Google Scholar] [CrossRef]
- Chen, Y.; Kemao, Q. General iterative algorithm for phase-extraction from fringe patterns with random phase-shifts, intensity harmonics and non-uniform phase-shift distribution. Opt. Express 2021, 29, 30905–30926. [Google Scholar] [CrossRef]
- Qian, J.; Feng, S.; Tao, T.; Hu, Y.; Li, Y.; Chen, Q.; Zuo, C. Deep-learning-enabled geometric constraints and phase unwrapping for single-shot absolute 3D shape measurement. APL Photonics 2020, 5, 046105. [Google Scholar] [CrossRef]
- Li, E.; Peng, X.; Xi, J.; Chicharo, J.F.; Yao, J.; Zhang, D. Multi-frequency and multiple phase-shift sinusoidal fringe projection for 3D profilometry. Opt. Express 2005, 13, 1561–1569. [Google Scholar] [CrossRef]
- Kim, E.-H.; Hahn, J.; Kim, H.; Lee, B. Profilometry without phase unwrapping using multi-frequency and four-step phase-shift sinusoidal fringe projection. Opt. Express 2009, 17, 7818–7830. [Google Scholar] [CrossRef] [Green Version]
- Jin, L.; Kodera, Y.; Yoshizawa, T.; Otani, Y. Shadow moiré profilometry using the phase-shifting method. Opt. Eng. 2000, 39, 2119–2123. [Google Scholar] [CrossRef]
- Hu, Y.; Chen, Q.; Feng, S.; Zuo, C. Microscopic fringe projection profilometry: A review. Opt. Lasers Eng. 2020, 135, 106192. [Google Scholar] [CrossRef]
- Gao, P.; Yao, B.; Lindlein, N.; Mantel, K.; Harder, I.; Geist, E. Phase-shift extraction for generalized phase-shifting interferometry. Opt. Lett. 2009, 34, 3553–3555. [Google Scholar] [CrossRef] [PubMed]
- Seyler, T.; Bienkowski, L.; Beckmann, T.; Fratz, M.; Bertz, A.; Carl, D. Multiwavelength digital holography in the presence of vibrations: Laterally resolved multistep phase-shift extraction. Appl. Opt. 2019, 58, G112–G119. [Google Scholar] [CrossRef]
- Zhang, X.; Sun, J.; Zhang, X. Automatic modulation classification based on novel feature extraction algorithms. IEEE Access 2020, 8, 16362–16371. [Google Scholar] [CrossRef]
- Guo, H.; Zhao, Z.; Chen, M. Efficient iterative algorithm for phase-shifting interferometry. Opt. Lasers Eng. 2007, 45, 281–292. [Google Scholar] [CrossRef]
- Luo, P.; Li, D.; Wang, R.; Zhang, X.; Li, X.; Zhao, W. Phase-extraction algorithm for a single-shot spatial-carrier orthogonal fringe pattern with least squares method. Opt. Eng. 2020, 59, 024103. [Google Scholar] [CrossRef]
- Duan, M.; Zong, Y.; Zhu, R.; Li, J. Phase-tilt iteration: Accurate and robust phase extraction from random tilt-shift interferograms. Opt. Lasers Eng. 2021, 142, 106595. [Google Scholar] [CrossRef]
- Sun, F.; Dan, X.; Yan, P.; Zhao, Q.; Zhong, S.; Wang, Y. A spatial-phase-shift-based defect detection shearography system with independent adjustment of shear amount and spatial carrier frequency. Opt. Laser Technol. 2020, 124, 105956. [Google Scholar] [CrossRef]
- Xu, Z.; Zhao, L. Investigation of Brillouin frequency shift error estimated by quadratic fitting and the improved algorithm. Optik 2021, 241, 166456. [Google Scholar] [CrossRef]
- Liu, C.-Y.; Yen, T.-P. Digital multi-step phase-shifting profilometry for three-dimensional ballscrew surface imaging. Opt. Laser Technol. 2016, 79, 115–123. [Google Scholar] [CrossRef]
- Feng, S.; Zuo, C.; Tao, T.; Hu, Y.; Zhang, M.; Chen, Q.; Gu, G. Robust dynamic 3-d measurements with motion-compensated phase-shifting profilometry. Opt. Lasers Eng. 2018, 103, 127–138. [Google Scholar] [CrossRef]
- Xie, L.; Zhang, X.; Tu, D.; Li, C.; Xiao, G.; Zhang, C.; Zhuang, S. Calibration of underwater fisheye camera with multi-frequency heterodyne technique based on light field. Meas. Sci. Technol. 2020, 31, 115206. [Google Scholar] [CrossRef]
- Zhang, J.; Yu, H.; Deng, H.; Chai, Z.; Ma, M.; Zhong, X. A robust and rapid camera calibration method by one captured image. IEEE Trans. Instrum. Meas. 2018, 68, 4112–4121. [Google Scholar] [CrossRef]
- Liu, Z.; Wu, Q.; Wu, S.; Pan, X. Flexible and accurate camera calibration using grid spherical images. Opt. Express 2017, 25, 15269–15285. [Google Scholar] [CrossRef] [PubMed]
- Kuo, C.-F.J.; Wu, H.-C. A homography fringe generation method of fringe projection profilometry technology. Opt. Lasers Eng. 2014, 56, 28–34. [Google Scholar]











{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Step | 1 | 2 | 3 | 4 |
|---|---|---|---|---|
| Theoretical phase-shifting/rad | 0.9323154 | 2.0123545 | 4.1532456 | 5.2231458 |
| Phase-shifting by iteration method/rad | 0.9323142 | 2.0123520 | 4.1532446 | 5.2231419 |
| Step | 1 | 2 | 3 |
|---|---|---|---|
| Theoretical phase-shifting (rad) | 1.560756 | 3.141456 | 4.712354 |
| Phase-shifting by iteration method (rad) | 1.560742 | 3.141425 | 4.712313 |
| Step | 1 | 2 | 3 |
|---|---|---|---|
| Theoretical phase-shifting (rad) | 2.1325135 | 4.1536589 | 6.3254756 |
| Phase-shifting by iteration method (rad) | 2.1325125 | 4.1536545 | 6.3254742 |
| Normal Iterative Algorithm | Normal Four-Step Phase-Shifting Algorithm | The Algorithm of This Paper | |
|---|---|---|---|
| Measurement accuracy (%) | 92.65 | 93.31 | 97.55 |
| RMSE (µm) | 17.8 | 20.7 | 13.2 |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2021 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, S.; Huang, H. Step Surface Profile Measurement Based on Fringe Projection Phase-Shifting Using Selective Sampling. Photonics 2021, 8, 592. https://doi.org/10.3390/photonics8120592
Zhang S, Huang H. Step Surface Profile Measurement Based on Fringe Projection Phase-Shifting Using Selective Sampling. Photonics. 2021; 8(12):592. https://doi.org/10.3390/photonics8120592
Chicago/Turabian StyleZhang, Songsong, and Haisong Huang. 2021. "Step Surface Profile Measurement Based on Fringe Projection Phase-Shifting Using Selective Sampling" Photonics 8, no. 12: 592. https://doi.org/10.3390/photonics8120592