Performance Evaluation and Error Tracing of Rotary Rayleigh Doppler Wind LiDAR

 , ,
, , {kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Abstract
:1. Introduction
2. RRDWL Wind Measurement Principle
2.1. Rayleigh Scattering LiDAR Equation
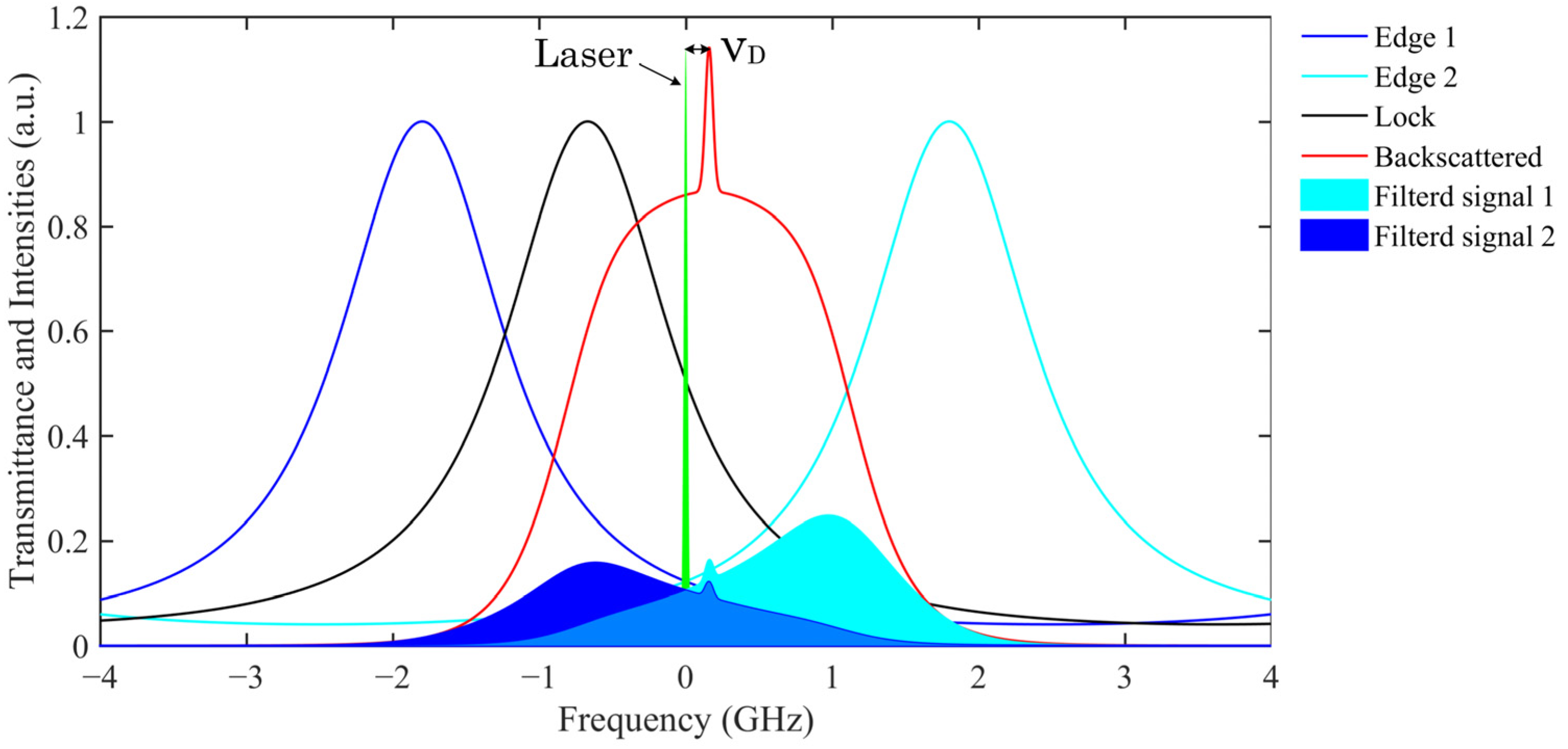
2.2. Double Edge Technique and FPI Frequency Identification
2.3. Wind Velocity Inversion and Synthesis
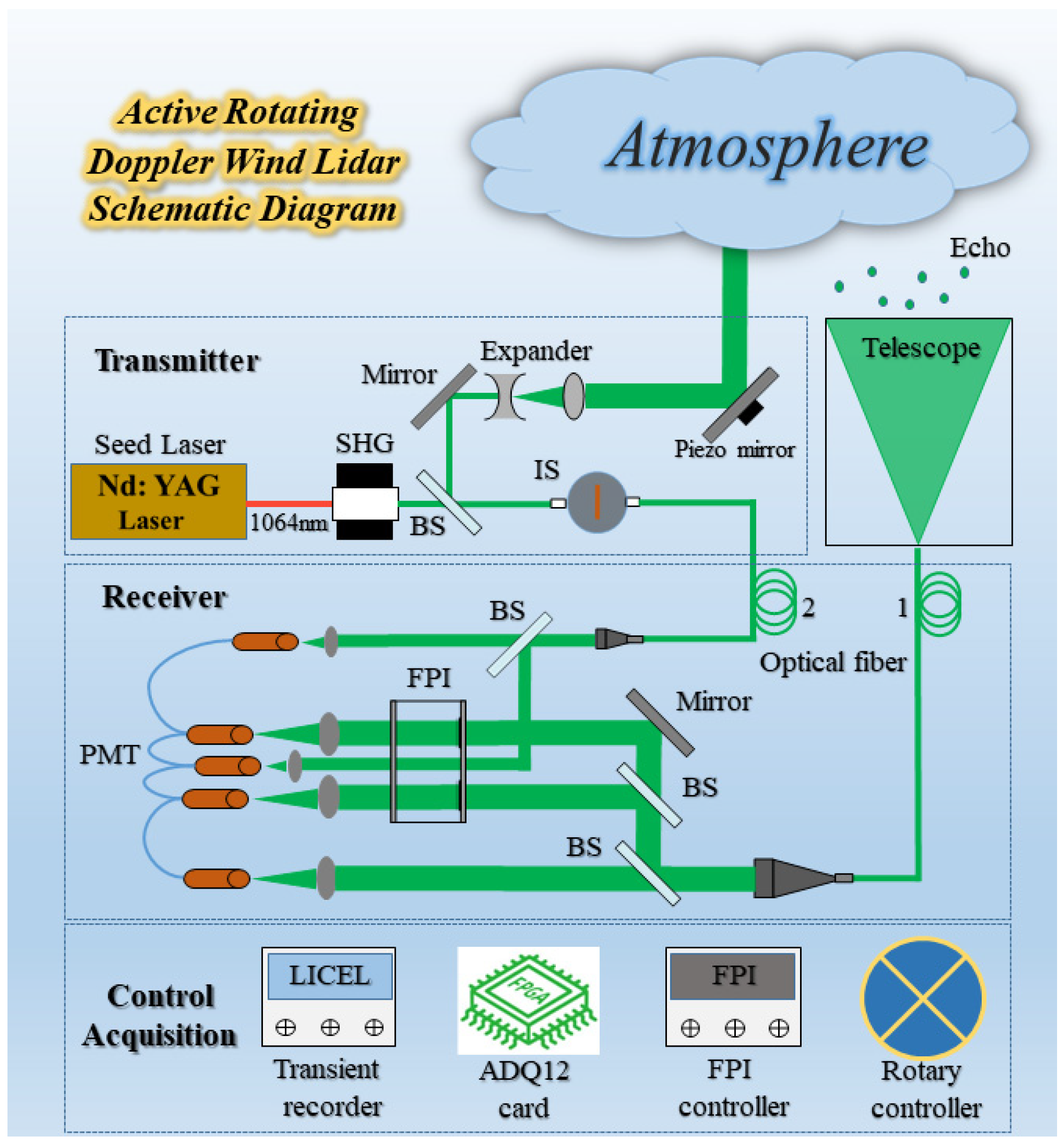
2.4. RRDWL System Parameters
3. RRDWL Performance Test
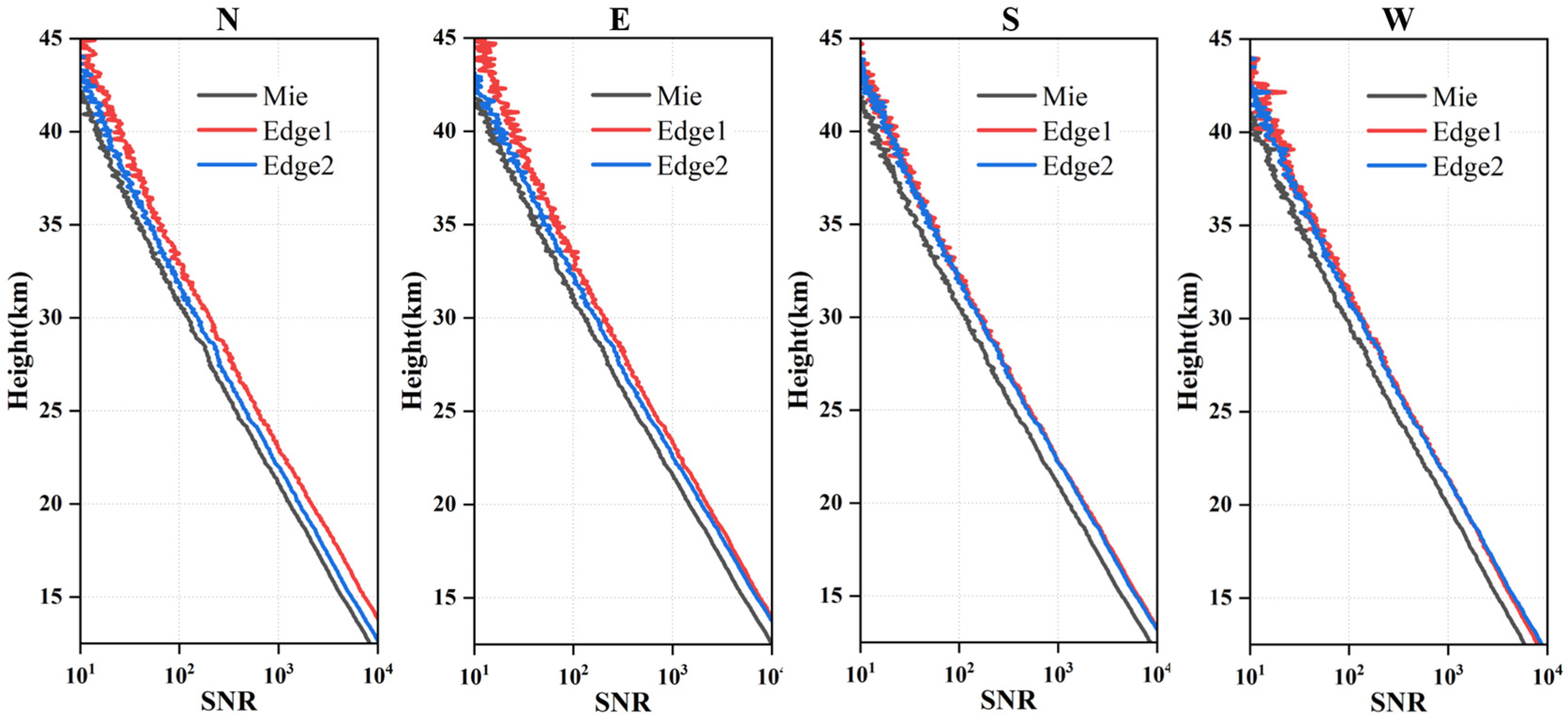
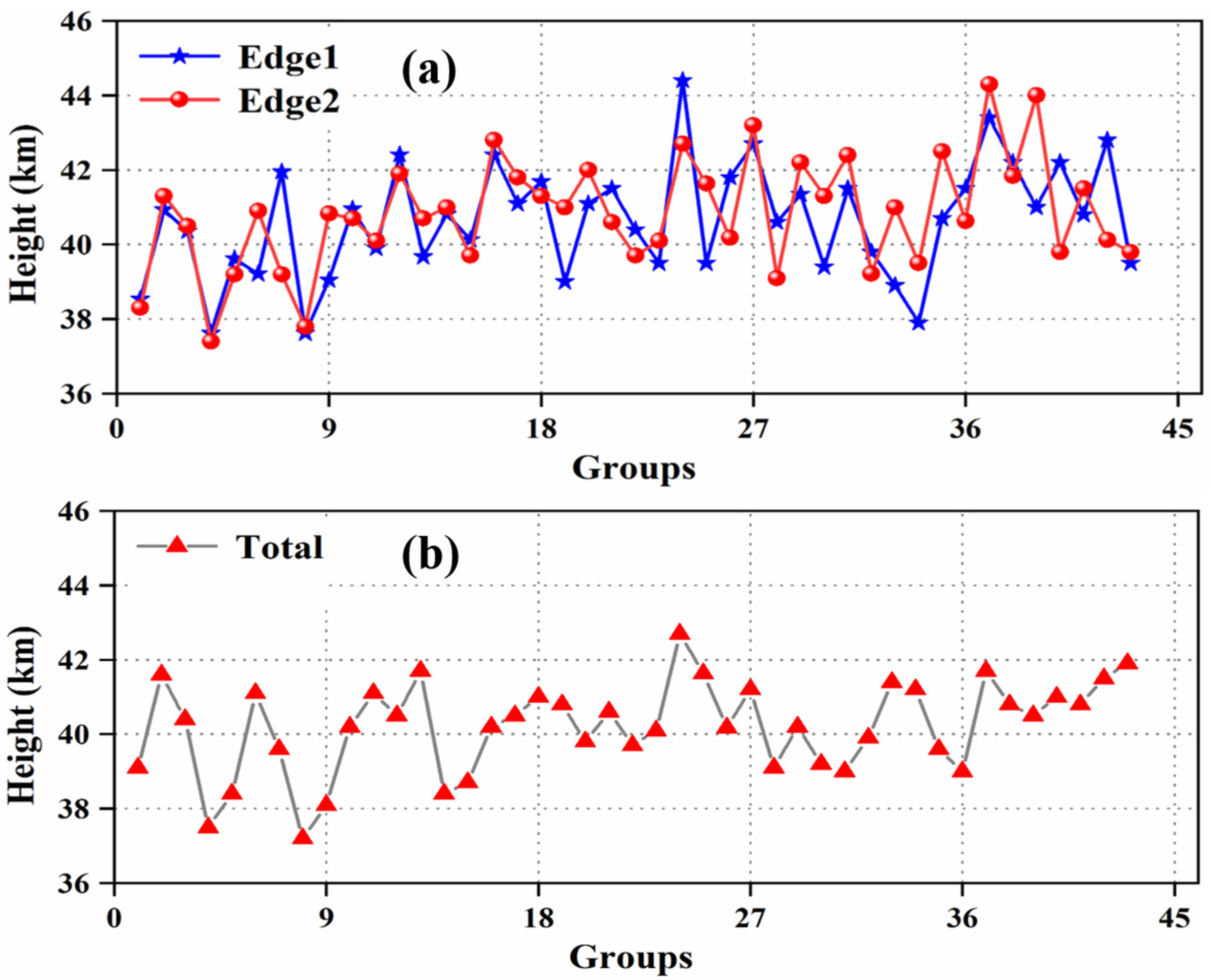
3.1. Performance Test Result
3.2. Measurement Error Analysis
4. Error Tracing Analysis
5. Discussion
- Laser Frequency Drift: Direct wind LiDAR systems typically use seed injection lasers, which can experience frequency drift due to temperature variations or vibrations. This drift can lead to significant errors in wind speed inversion.
- Laser Beam Divergence and Stability: In real-world environments, the emitted laser beam may exhibit jitter or amplification in terms of divergence angle and frequency stability. This can impede the effective identification of Doppler frequency shifts caused by wind, resulting in increased errors in wind speed inversion. Suitable algorithms and devices are necessary to accurately identify and lock onto the frequency.
- Instrument Stability and Calibration: Direct wind LiDAR systems often consist of multiple sets of precision instruments. The complex working environment can introduce varying degrees of error, impacting the stability and calibration of these instruments.
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
References
- Yang, J.; Xiao, C.; Hu, X.; Xu, Q. Responses of zonal wind at ~40° N to stratospheric sudden warming events in the stratosphere, mesosphere and lower thermosphere. Sci. China Technol. Sci. 2017, 60, 935–945. [Google Scholar] [CrossRef]
- Zhao, R.; Dou, X.; Xue, X.; Sun, D.; Han, Y.; Chen, C.; Zheng, J.; Li, Z.; Zhou, A.; Han, Y.; et al. Stratosphere and lower mesosphere wind observation and gravity wave activities of the wind field in China using a mobile Rayleigh Doppler lidar. J. Geophys. Res. Space Phys. 2017, 122, 8847–8857. [Google Scholar] [CrossRef]
- Wang, Z.; Liu, Z.; Liu, L.; Wu, S.; Liu, B.; Li, Z.; Chu, X. Iodine-filter-based mobile Doppler lidar to make continuous and full-azimuth-scanned wind measurements: Data acquisition and analysis system, data retrieval methods, and error analysis. Appl. Opt. 2010, 49, 6960–6978. [Google Scholar] [CrossRef] [PubMed]
- Hedin, A.E.; Fleming, E.L.; Manson, A.H.; Schmidlin, F.J.; Avery, S.K.; Clark, R.R.; Franke, S.J.; Fraser, G.J.; Tsuda, T.; Vial, F.; et al. Empirical wind model for the upper, middle and lower atmosphere. J. Atmos. Terr. Phys. 1996, 58, 1421–1447. [Google Scholar] [CrossRef]
- Prasad, N.S.; Sibell, R.; Vetorino, S.; Higgins, R.; Tracy, A. All-Fiber, Modular, Compact Wind Lidar for Wind Sensing and Wake Vortex Applications. Proc. SPIE 2015, 9465, 94650C. [Google Scholar]
- Dou, X.; Han, Y.; Sun, D.; Xia, H.; Shu, Z.; Zhao, R.; Shangguan, M.; Guo, J. Mobile Rayleigh Doppler lidar for wind and temperature measurements in the stratosphere and lower mesosphere. Opt. Express 2014, 22, A1203–A1221. [Google Scholar] [CrossRef] [PubMed]
- Han, F.; Liu, H.; Sun, D.; Han, Y.; Zhou, A.; Zhang, N.; Chu, J.; Zheng, J.; Jiang, S.; Wang, Y. An Ultra-narrow Bandwidth Filter for Daytime Wind Measurement of Direct Detection Rayleigh Lidar. Curr. Opt. Photonics 2020, 4, 69–80. [Google Scholar]
- Lombard, L.; Valla, M.; Planchat, C.; Goular, D.; Augère, B.; Bourdon, P.; Canat, G. Eyesafe coherent detection wind lidar based on a beam-combined pulsed laser source. Opt. Lett. 2015, 40, 1030–1033. [Google Scholar] [CrossRef] [PubMed]
- Liu, H.; Zhu, X.; Fan, C.; Bi, D.; Liu, J.; Zhang, X.; Zhu, X.; Chen, W. Field Performance of All-Fiber Pulsed Coherent Doppler Lidar. Eur. Phys. J. Conf. 2020, 237, 08009. [Google Scholar] [CrossRef]
- Gentry, B.M.; Chen, H.; Li, S.X. Wind measurements with 355-nm molecular Doppler lidar. Opt. Lett. 2000, 25, 1231–1233. [Google Scholar] [CrossRef]
- Feifei, L.; Decang, B.; Heng, L.; Lucheng, Y.; Mingjian, W.; Xiaopeng, Z.; Jiqiao, L.; Weibiao, C. Principle Prototype and Experimental Progress of Wind Lidar in Near Space. Chin. J. Lasers 2020, 47, 0810003. [Google Scholar] [CrossRef]
- Souprayen, C.; Garnier, A.; Hertzog, A. Rayleigh-Mie Doppler wind lidar for atmospheric measurements. II. Mie scattering effect, theory, and calibration. Appl. Opt. 1999, 38, 2422–2431. [Google Scholar] [CrossRef] [PubMed]
- Chanin, M.L.; Garnier, A.; Hauchecorne, A.; Porteneuve, J. A doppler lidar for measuring winds in the middle atmosphere. Geophys. Res. Lett. 1989, 16, 1273–1276. [Google Scholar] [CrossRef]
- Baumgarten, G. Doppler Rayleigh/Mie/Raman lidar for wind and temperature measurements in the middle atmosphere up to 80 km. Atmos. Meas. Tech. 2010, 3, 1509–1518. [Google Scholar] [CrossRef]
- Huffaker, R.M.; Reveley, P.A. Solid-state coherent laser radar wind field measurement systems. Pure Appl. Opt. J. Eur. Opt. Soc. Part A 1998, 7, 863–873. [Google Scholar] [CrossRef]
- Zhao, Y.; Zhang, X.; Zhang, Y.; Ding, J.; Wang, K.; Gao, Y.; Su, R.; Fang, J. Data Processing and Analysis of Eight-Beam Wind Profile Coherent Wind Measurement Lidar. Remote Sens. 2021, 13, 3549. [Google Scholar] [CrossRef]
- Zhang, H.; Liu, X.; Wang, Q.; Zhang, J.; He, Z.; Zhang, X.; Li, R.; Zhang, K.; Tang, J.; Wu, S. Low-Level Wind Shear Identification along the Glide Path at BCIA by the Pulsed Coherent Doppler Lidar. Atmosphere 2020, 12, 50. [Google Scholar] [CrossRef]
- Guo, W.; Shen, F.; Shi, W.; Liu, M.; Wang, Y.; Zhu, C.; Shen, L.; Wang, B.; Zhuang, P. Data inversion method for dual-frequency Doppler lidar based on Fabry-Perot etalon quad-edge technique. Optik 2018, 159, 31–38. [Google Scholar] [CrossRef]
- Zhang, F. Research on Doppler Wind Lidar System with Wind Detection of High Temporal and Spatial Resolution. Ph.D. Thesis, University of Science and Technology of China, Hefei, China, 2015. (In Chinese). [Google Scholar]
- Shen, F.; Xie, C.; Qiu, C.; Wang, B. Fabry-Perot etalon-based ultraviolet trifrequency high-spectral-resolution lidar for wind, temperature, and aerosol measurements from 0.2 to 35 km altitude. Appl. Opt. 2018, 57, 9328–9340. [Google Scholar] [CrossRef]
- Xia, H.; Dou, X.; Shangguan, M.; Zhao, R.; Sun, D.; Wang, C.; Qiu, J.; Shu, Z.; Xue, X.; Han, Y.; et al. Stratospheric temperature measurement with scanningFabry-Perot interferometer for wind retrieval from mobile Rayleigh Doppler lidar. Opt. Express 2014, 22, 21775–21789. [Google Scholar] [CrossRef]
- Liu, Z.-S.; Wu, D.; Liu, J.-T.; Zhang, K.-L.; Chen, W.-B.; Song, X.-Q.; Hair, J.W.; She, C.-Y. Low-altitude atmospheric wind measurement from thecombined Mie and Rayleigh backscattering by Doppler lidar with an iodine filter. Appl. Opt. 2002, 41, 7079–7086. [Google Scholar] [CrossRef] [PubMed]
- Ansmann, A.; Ingmann, P.; Le Rille, O.; Lajas, D.; Wandinger, U. Particle backscatter and extinction profiling with the spaceborne HSR Doppler wind lidar ALADIN. Appl. Opt. 2007, 46, 6606–6622. [Google Scholar] [CrossRef] [PubMed]
- Zhang, C.; Sun, X.; Zhang, R.; Zhao, S.; Lu, W.; Liu, Y.; Fan, Z. Impact of solar background radiation on the accuracy of wind observations of spaceborne Doppler wind lidars based on their orbits and optical parameters. Opt. Express 2019, 27, A936–A952. [Google Scholar] [CrossRef] [PubMed]
- Zhao, M.; Xie, C.; Wang, B.; Xing, K.; Chen, J.; Fang, Z.; Li, L.; Cheng, L. A Rotary Platform Mounted Doppler Lidar for Wind Measurements in Upper Troposphere and Stratosphere. Remote Sens. 2022, 14, 5556. [Google Scholar] [CrossRef]
- Chen, J.; Xie, C.; Zhao, M.; Ji, J.; Wang, B.; Xing, K. Research on the Performance of an Active Rotating Tropospheric and Stratospheric Doppler Wind Lidar Transmitter and Receiver. Remote Sens. 2023, 15, 952. [Google Scholar] [CrossRef]















Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2024 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Chen, J.; Xie, C.; Ji, J.; Li, L.; Wang, B.; Xing, K.; Zhao, M. Performance Evaluation and Error Tracing of Rotary Rayleigh Doppler Wind LiDAR. Photonics 2024, 11, 398. https://doi.org/10.3390/photonics11050398
Chen J, Xie C, Ji J, Li L, Wang B, Xing K, Zhao M. Performance Evaluation and Error Tracing of Rotary Rayleigh Doppler Wind LiDAR. Photonics. 2024; 11(5):398. https://doi.org/10.3390/photonics11050398
Chicago/Turabian StyleChen, Jianfeng, Chenbo Xie, Jie Ji, Leyong Li, Bangxin Wang, Kunming Xing, and Ming Zhao. 2024. "Performance Evaluation and Error Tracing of Rotary Rayleigh Doppler Wind LiDAR" Photonics 11, no. 5: 398. https://doi.org/10.3390/photonics11050398