Design and Implementation of a Non-Common-View Axis Alignment System for Airborne Laser Communication


Abstract
:1. Introduction
2. System Working Principle
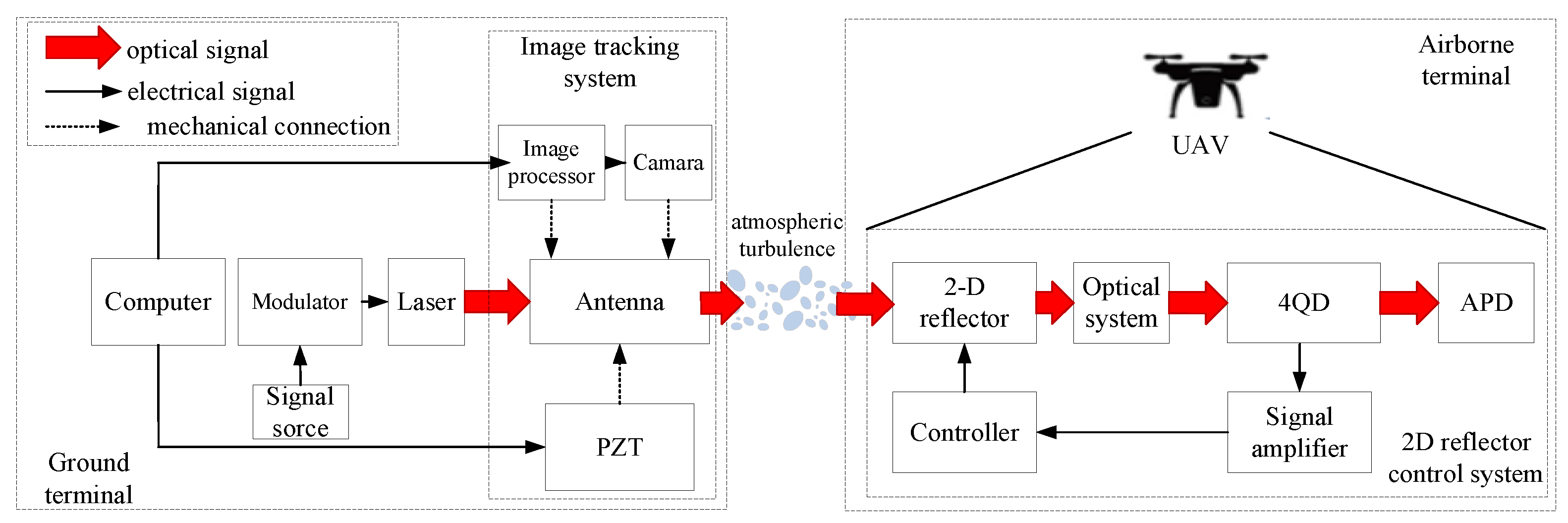
2.1. System Structure
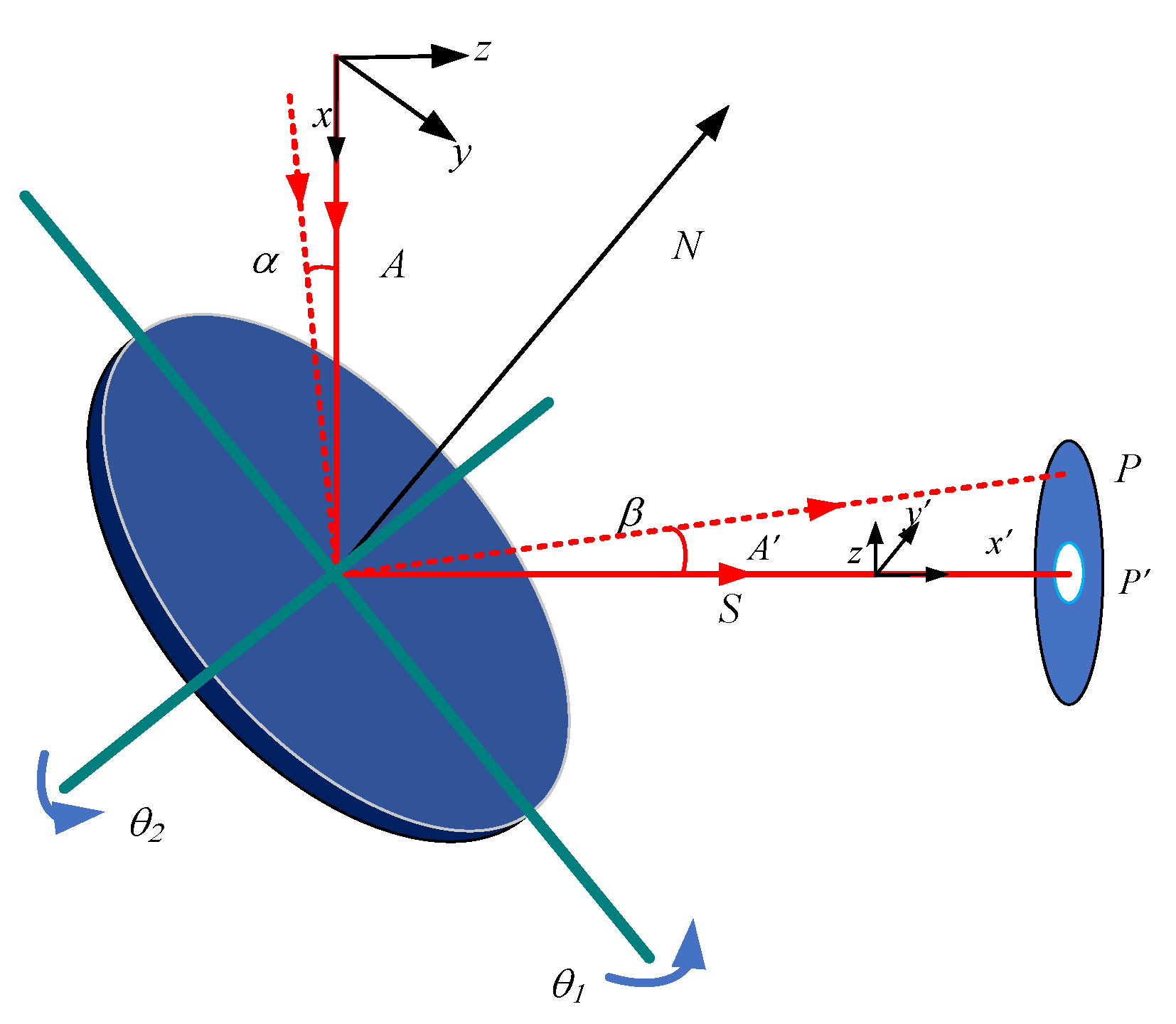
2.2. Alignment Principle
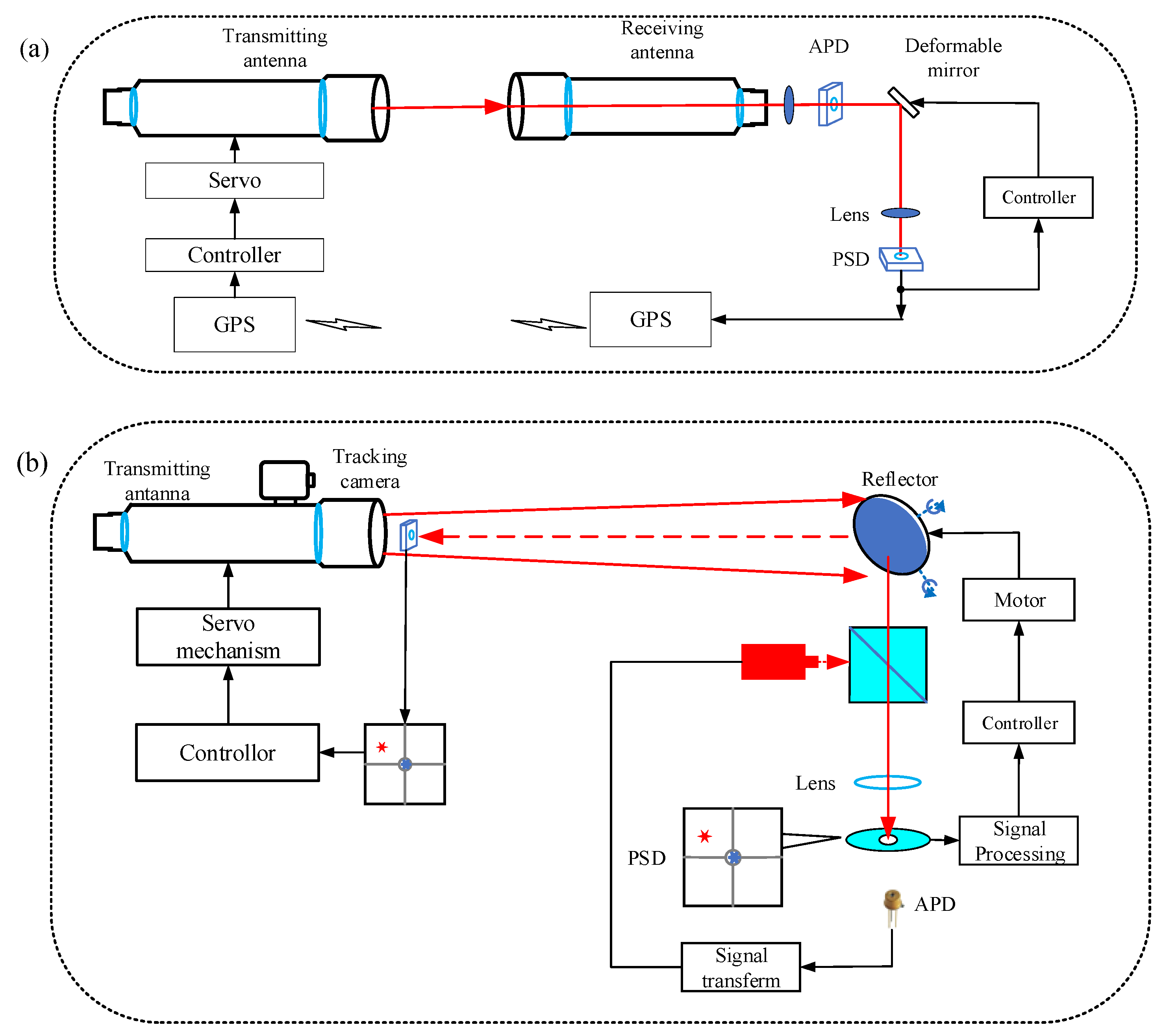
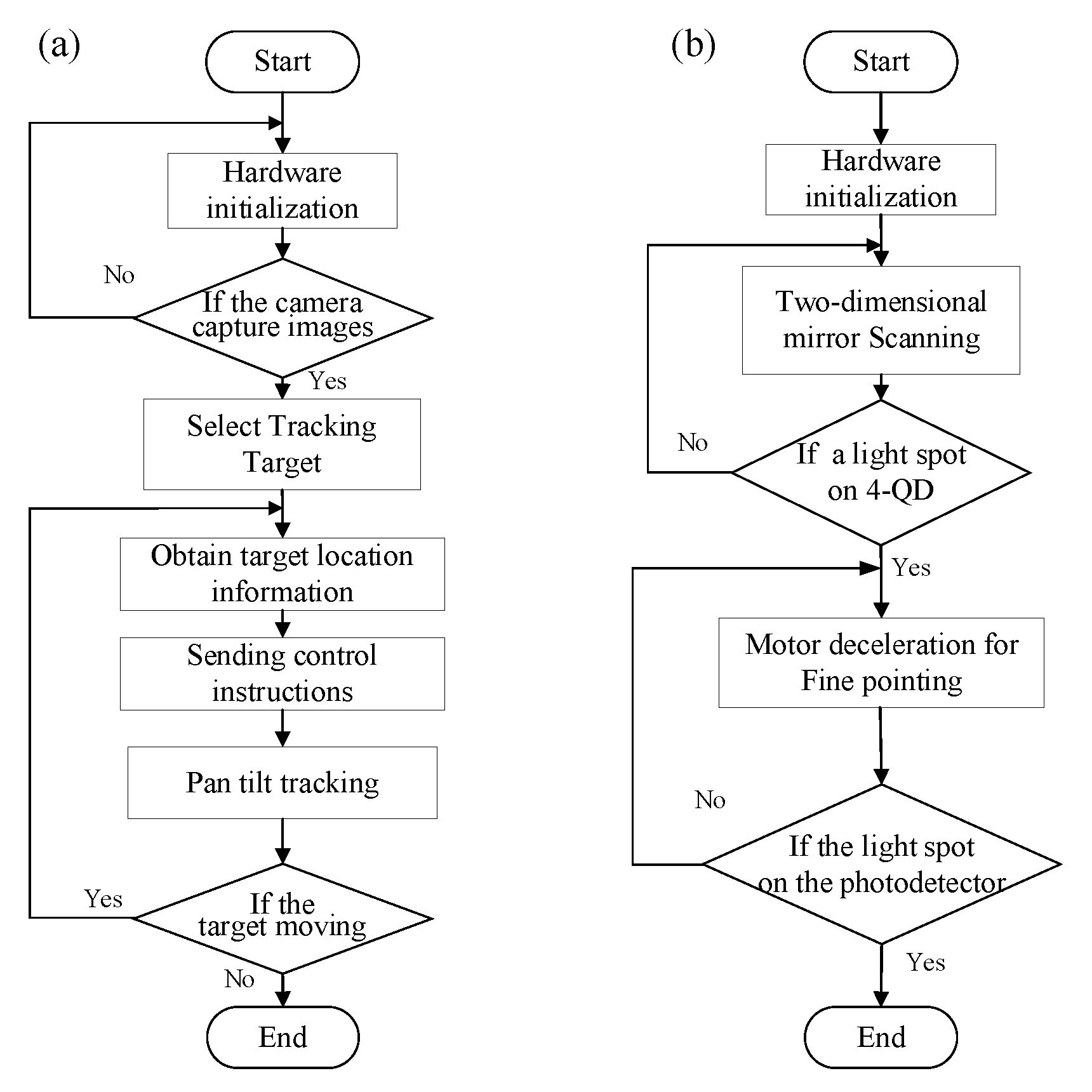
2.3. Working Principle of the APT System
3. Methods
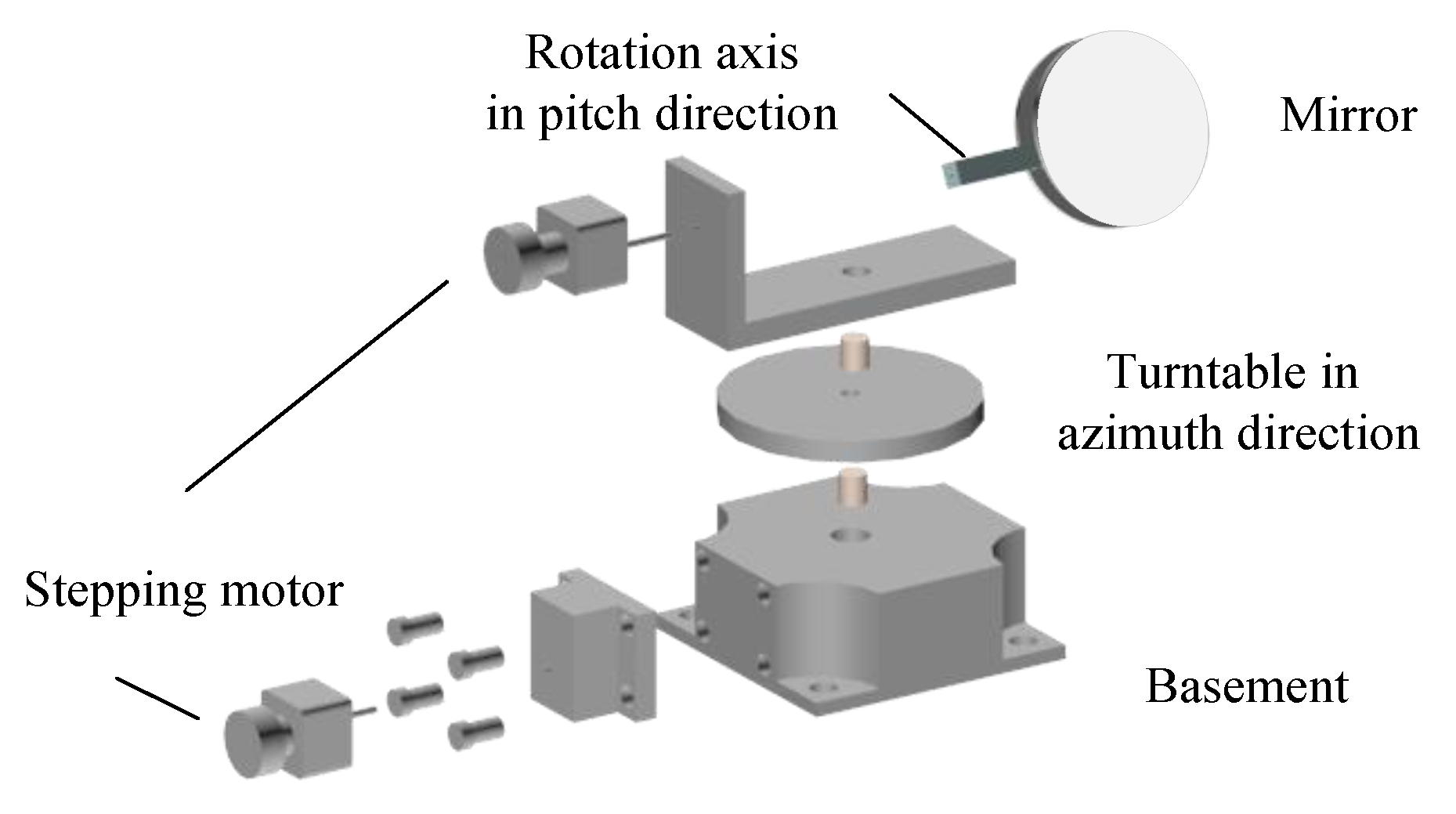
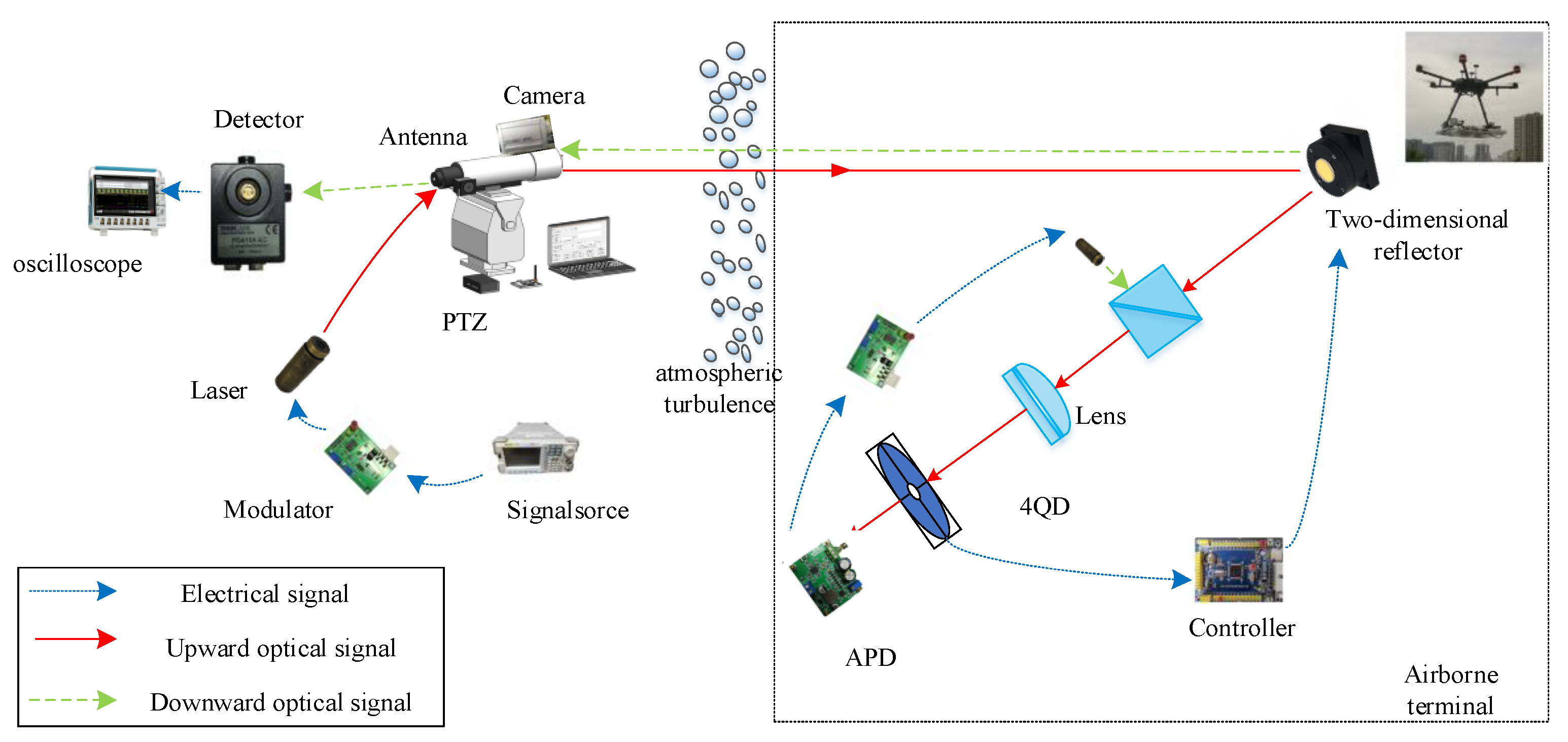
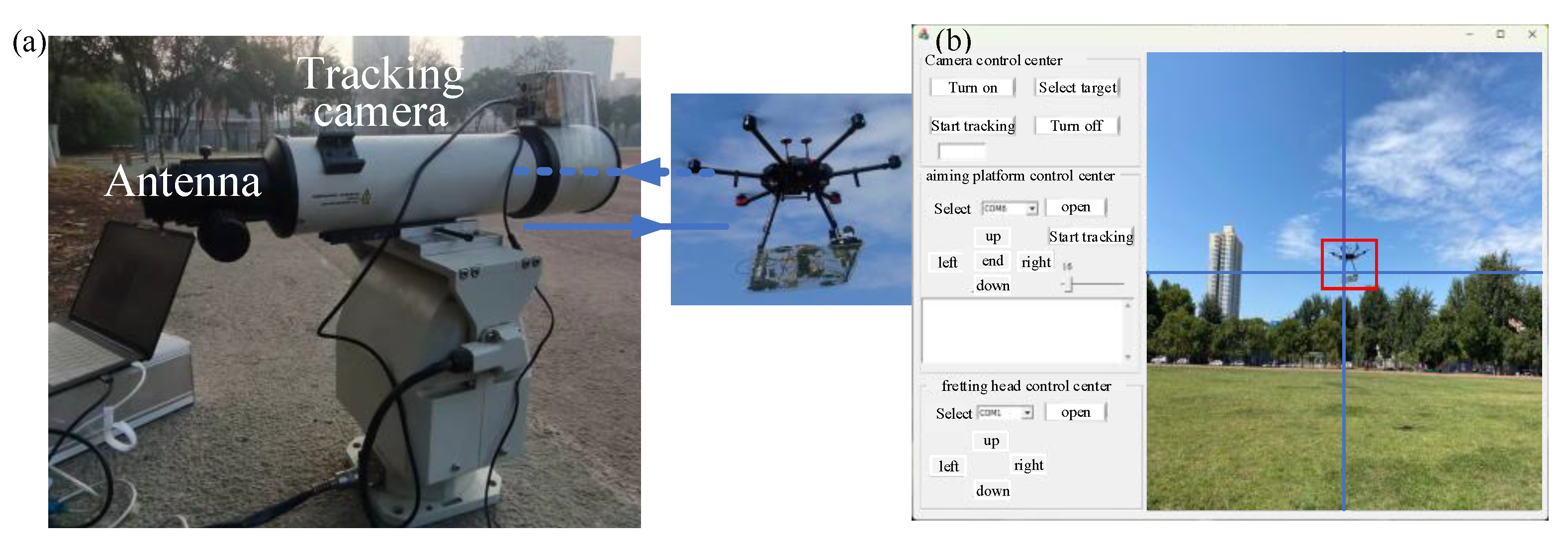
3.1. System Composition
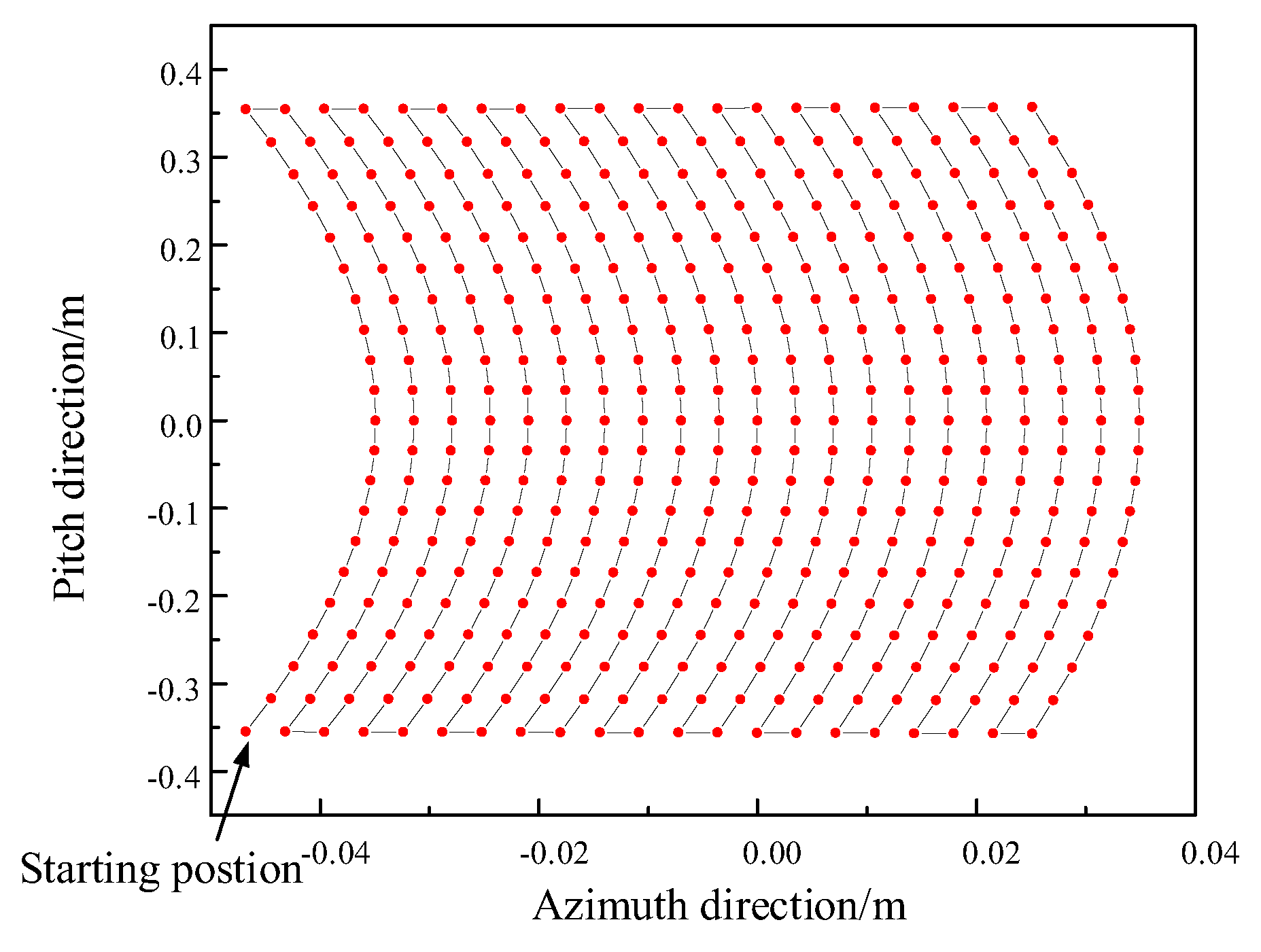
3.2. Ground End Alignment Experiment
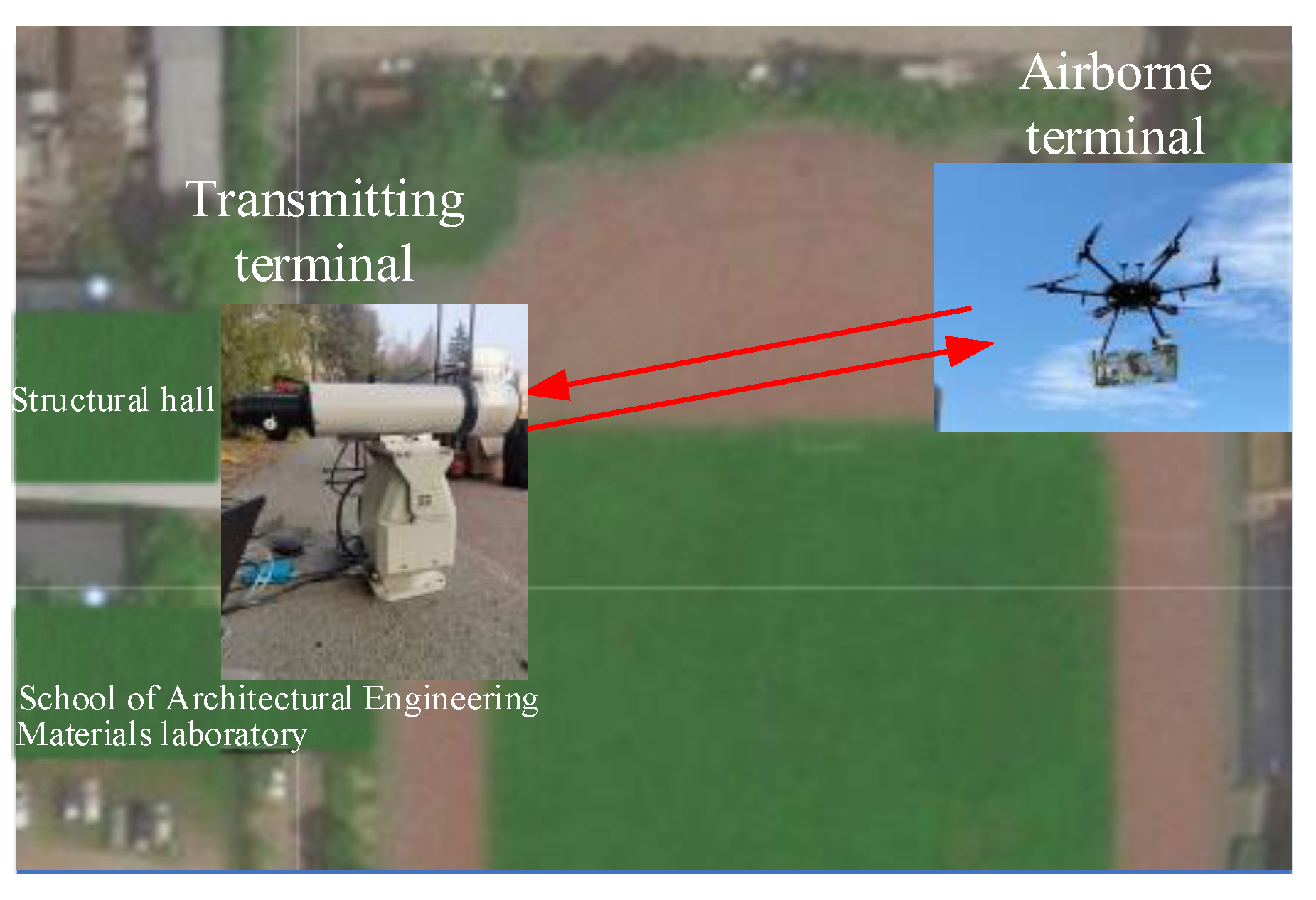
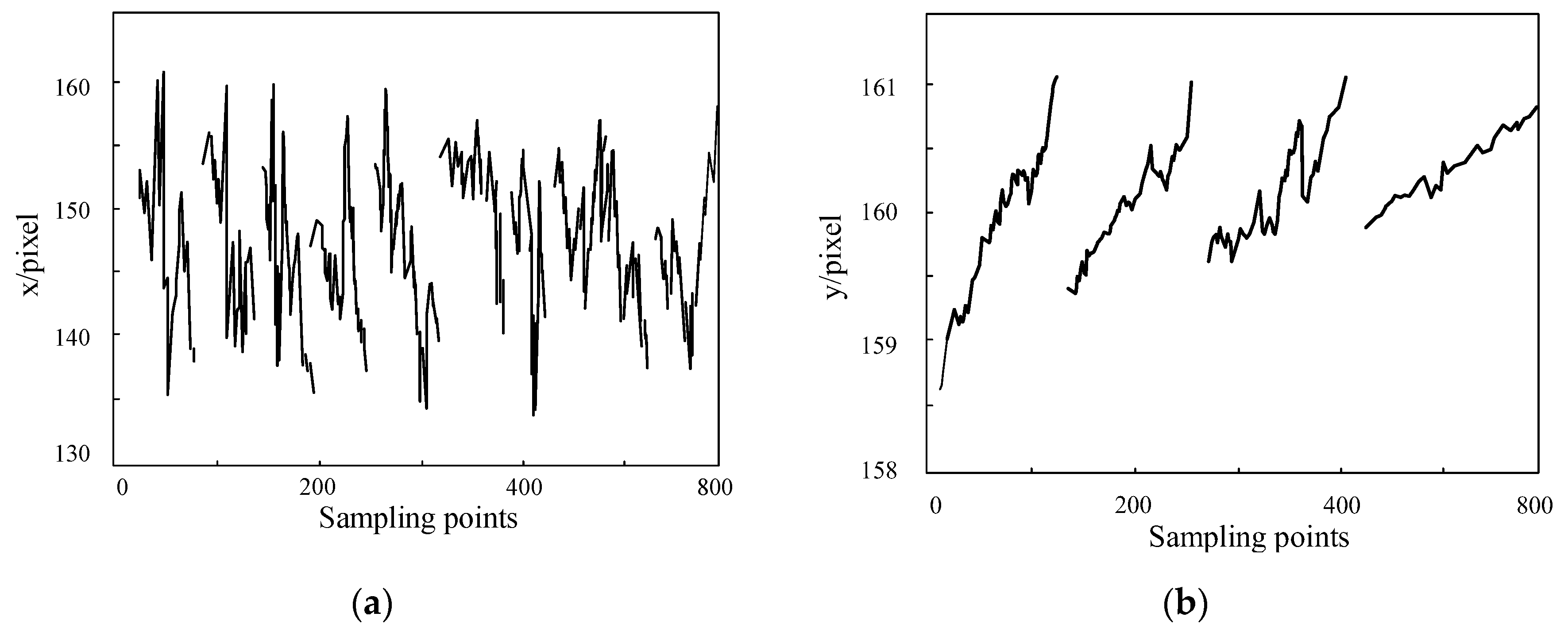
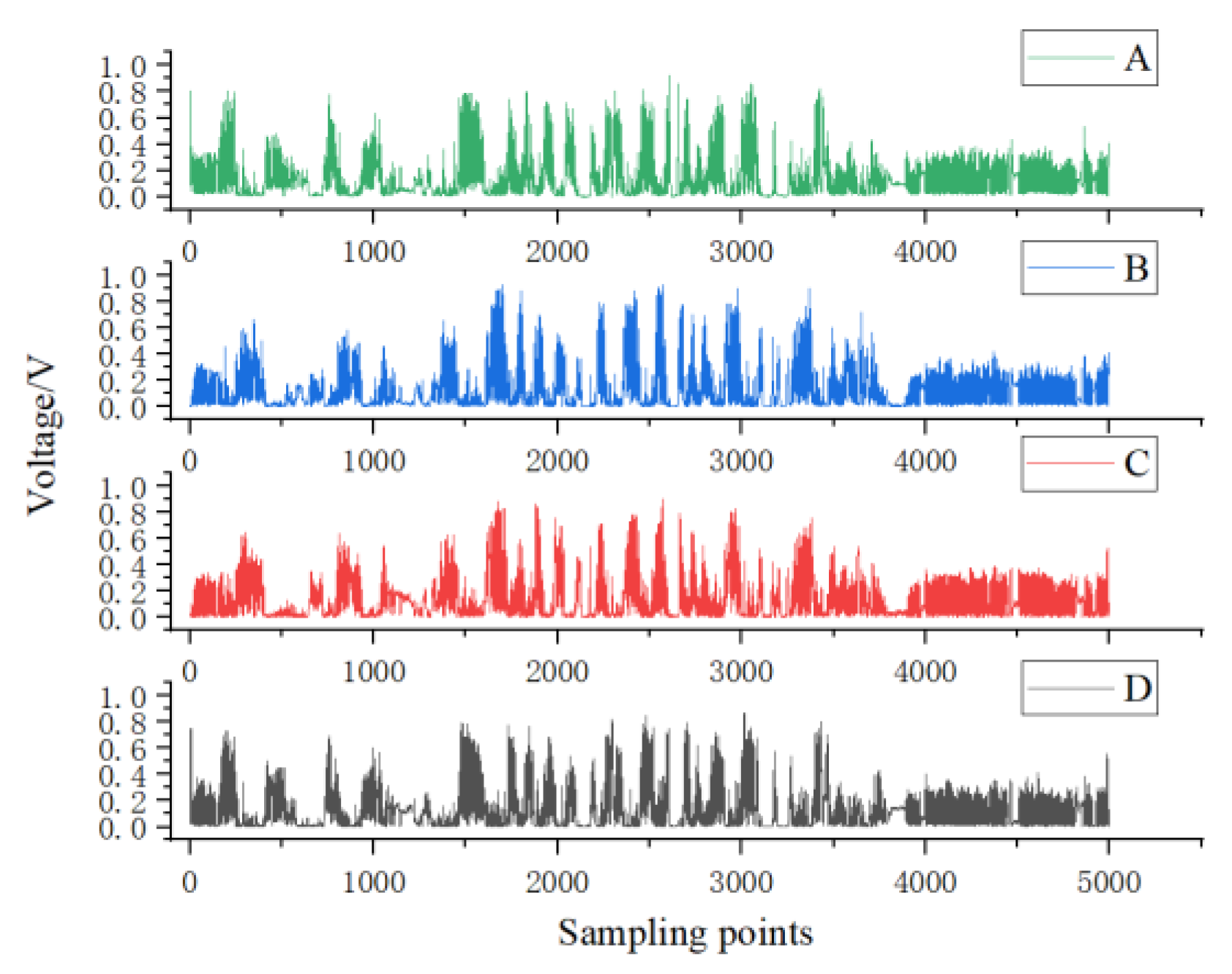
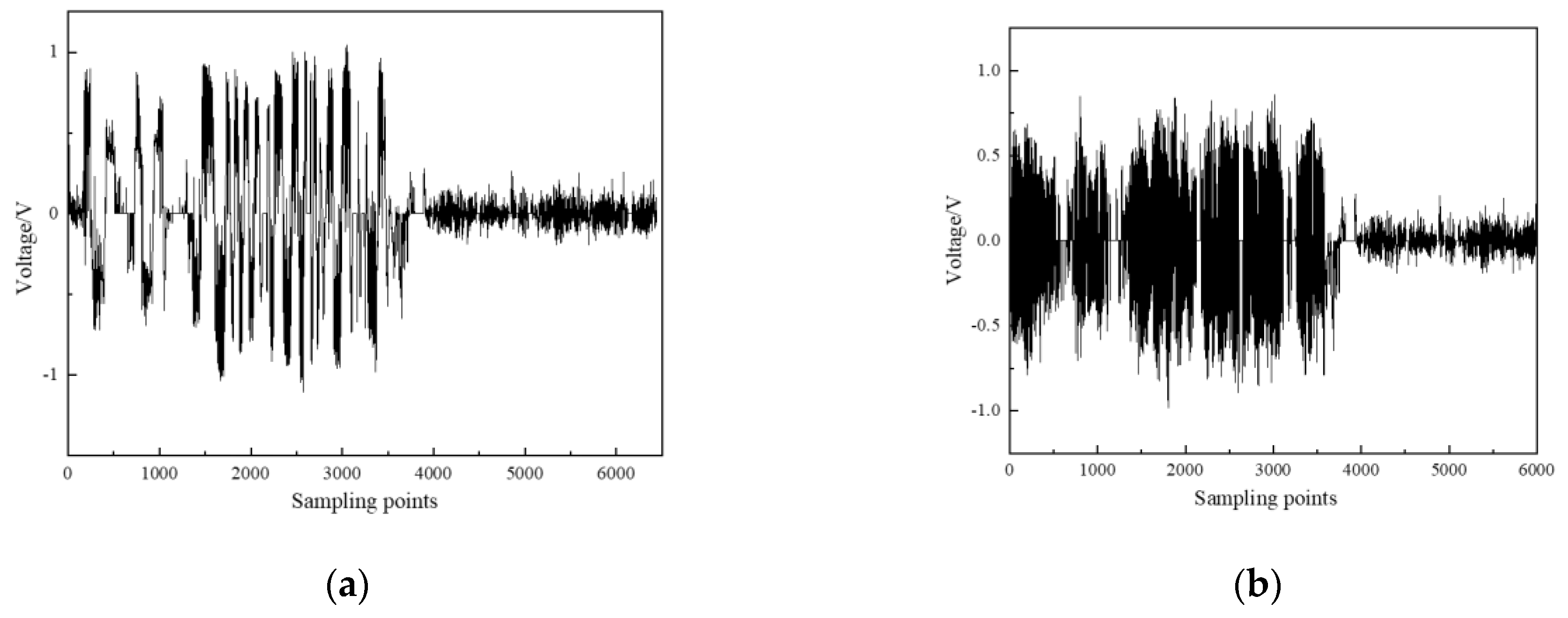
3.3. Airborne End Fine Alignment Experiment
3.4. Discussion
4. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Ke, X.; Wu, J.; Yang, S. Research Progress and Prospect of Atmospheric Turbulence for Wireless Optical Communication. Chin. J. Radio Sci. 2021, 36, 323–339. [Google Scholar]
- Griethe, W.; Gregory, M.; Heine, F.; Kämpfner, H. High-speed laser communications in UAV scenarios. In Proceedings of the Airborne Intelligence, Surveillance, Reconnaissance (ISR) Systems and Applications VIII, Orlando, FL, USA, 25–29 April 2011; pp. 106–115. [Google Scholar]
- Fawaz, W.; Abou-Rjeily, C.; Assi, C. UAV-aided cooperation for FSO communication systems. IEEE Commun. Mag. 2018, 56, 70–75. [Google Scholar] [CrossRef]
- Zeng, F.; Gao, S.; San, X.; Zhang, X. Development Status and Trend of Airborne Laser Communication Terminals. Chin. Opt. 2016, 9, 65–73. [Google Scholar] [CrossRef]
- Sun, X.; Kong, M.; Alkhazragi, O.; Shen, C.; Ooi, E.-N.; Zhang, X.; Buttner, U.; Ng, T.K.; Ooi, B.S. Non-line-of-sight methodology for high-speed wireless optical communication in highly turbid water. Opt. Commun. 2020, 461, 125264. [Google Scholar] [CrossRef]
- Li, Q.; Liu, L.; Ma, X.; Chen, S.-L.; Yun, H.; Tang, S. Development of multitarget acquisition, pointing, and tracking system for airborne laser communication. IEEE Trans. Ind. Inf. 2018, 15, 1720–1729. [Google Scholar] [CrossRef]
- Zhang, M.; Li, B.; Tong, S. A new composite spiral scanning approach for beaconless spatial acquisition and experimental investigation of robust tracking control for laser communication system with disturbance. IEEE Photonics J. 2020, 12, 1–12. [Google Scholar] [CrossRef]
- Ke, X.; Lei, S.; Yang, P. Beam Coaxial Alignment Detection in Atmospheric Laser Communication. Chin. J. Lasers 2016, 43, 181–190. [Google Scholar]
- Dabiri, M.T.; Sadough, S.M.S.; Ansari, I.S. Tractable Optical Channel Modeling between Uavs. IEEE Trans. Veh. Technol. 2019, 68, 11543–11550. [Google Scholar] [CrossRef]
- Yang, S.; He, L. Some Problems of the Design of Compound-Axis Servomechanism Using Single Detector. Laser Infrared 2020, 50, 457–462. [Google Scholar]
- Wang, F.; Wang, Y.; Tian, D. Perfect Tracking Control for Fast-Steering Mirror Driven by Voice Coil Motor. Opt. Precis. Eng. 2020, 28, 1997–2006. [Google Scholar] [CrossRef]
- Wang, J.; Song, Y.; Liu, Y.; Zhang, J. Beam Compound Tracking Control Technology Based on Rotating Double Prism. Acta Photonica Sin. 2023, 52, 233–244. [Google Scholar]
- Gao, L.; Liu, Q.; He, Z. Two-Dimensional Optical Phased Array Reflector Based on Gires-Tournois Resonator. Acta Opt. Sin. 2021, 41, 132–137. [Google Scholar]
- Antonello, R.; Branz, F.; Sansone, F.; Cenedese, A.; Francesconi, A. High-Precision Dual-Stage Pointing Mechanism for Miniature Satellite Laser Communication Terminals. IEEE Trans. Ind. Electr. 2021, 68, 776–785. [Google Scholar] [CrossRef]
- Yang, S.; Ke, X.; Wu, J.; Liu, X. Fast Alignment of Wireless Optical Communication Using Two-Dimensional Mirror. Chin. J. Lasers 2022, 49, 101–114. [Google Scholar]
- Ke, X.; Chen, X.; Wu, J. A Drone Relay Laser Communication System. China Patent 109067452, 21 December 2018. [Google Scholar]
- Pokorny, P. One-mirror and two-mirror three-dimensional optical scanners—Position and accuracy of laser beam spot. Appl. Opt. 2014, 53, 2730–2740. [Google Scholar] [CrossRef] [PubMed]
- Ke, X.; Liang, H. Airborne Laser Communication System with Automated Tracking. Int. J. Opt. 2021, 2021, 9920368. [Google Scholar] [CrossRef]
- Chen, Y.; Zhu, T.; Li, R. Design and Realization of the Angle-Measurement Algorithm of the Four-Quadrant Detector Based on the Interpolation Algorithm. Infrared Laser Eng. 2011, 40, 544–547+569. [Google Scholar]
- Ke, X.; Wang, H. Research on Hybrid Dual-Axis Controlled Sun Automatic Tracking System. Instr. Technol. Sens. 2021, 63–68. [Google Scholar]





















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Equipment | Parameters |
|---|---|
| Laser | wavelength: 650 nm |
| power: 80 mW | |
| Tracking camera | zoom factor: 128 |
| pixel size: 1 pixel = 20 µm | |
| Two-dimensional aiming gimbal | adjustment range: 0~360° (orientation) −70–70° (pitch) |
| maximum load weight: 10 kg | |
| Piezoelectric micro-motion gimbal | model: PT2 K |
| loading capacity: 4 kg | |
| voltage input range: 0~10 V | |
| driving mode: piezoelectric ceramics | |
| resolution:0.01 µrad | |
| Antenna | aperture: 105 mm |
| Two-dimensional mirror | mirror surface: 60 mm |
| Adjustment range: −90~90° (orientation) 0–360° (pitch) | |
| Photodetector | type: InGaAs |
| cut-off frequency: 30 kHz~1.5 GHz | |
| Four-quadrant detector | photosensitive surface diameter: 5.05 mm |
| response time: 13 ns |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Ke, C.; Shu, Y.; Ke, X.; Han, M.; Chen, R. Design and Implementation of a Non-Common-View Axis Alignment System for Airborne Laser Communication. Photonics 2023, 10, 1037. https://doi.org/10.3390/photonics10091037
Ke C, Shu Y, Ke X, Han M, Chen R. Design and Implementation of a Non-Common-View Axis Alignment System for Airborne Laser Communication. Photonics. 2023; 10(9):1037. https://doi.org/10.3390/photonics10091037
Chicago/Turabian StyleKe, Chenghu, Yuting Shu, Xizheng Ke, Meimiao Han, and Ruidong Chen. 2023. "Design and Implementation of a Non-Common-View Axis Alignment System for Airborne Laser Communication" Photonics 10, no. 9: 1037. https://doi.org/10.3390/photonics10091037