Spot Invalid Point Repair Algorithm of Detector Array Measurement System Based on Image Correlation Coefficient

 ,
,
Abstract
:1. Introduction
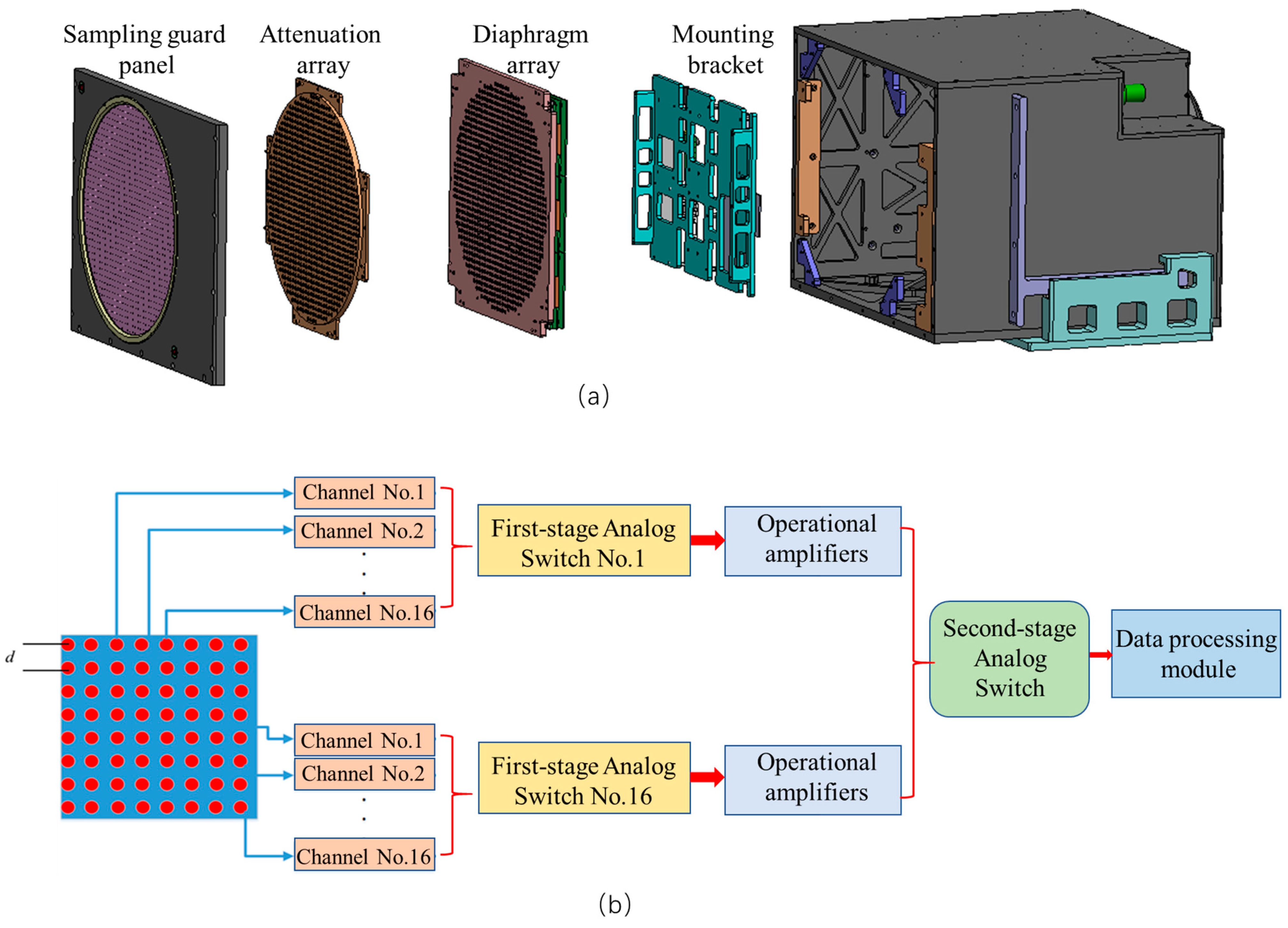
2. Materials and Methods
2.1. Calculation Method of Spot Parameters in Array Detection Method
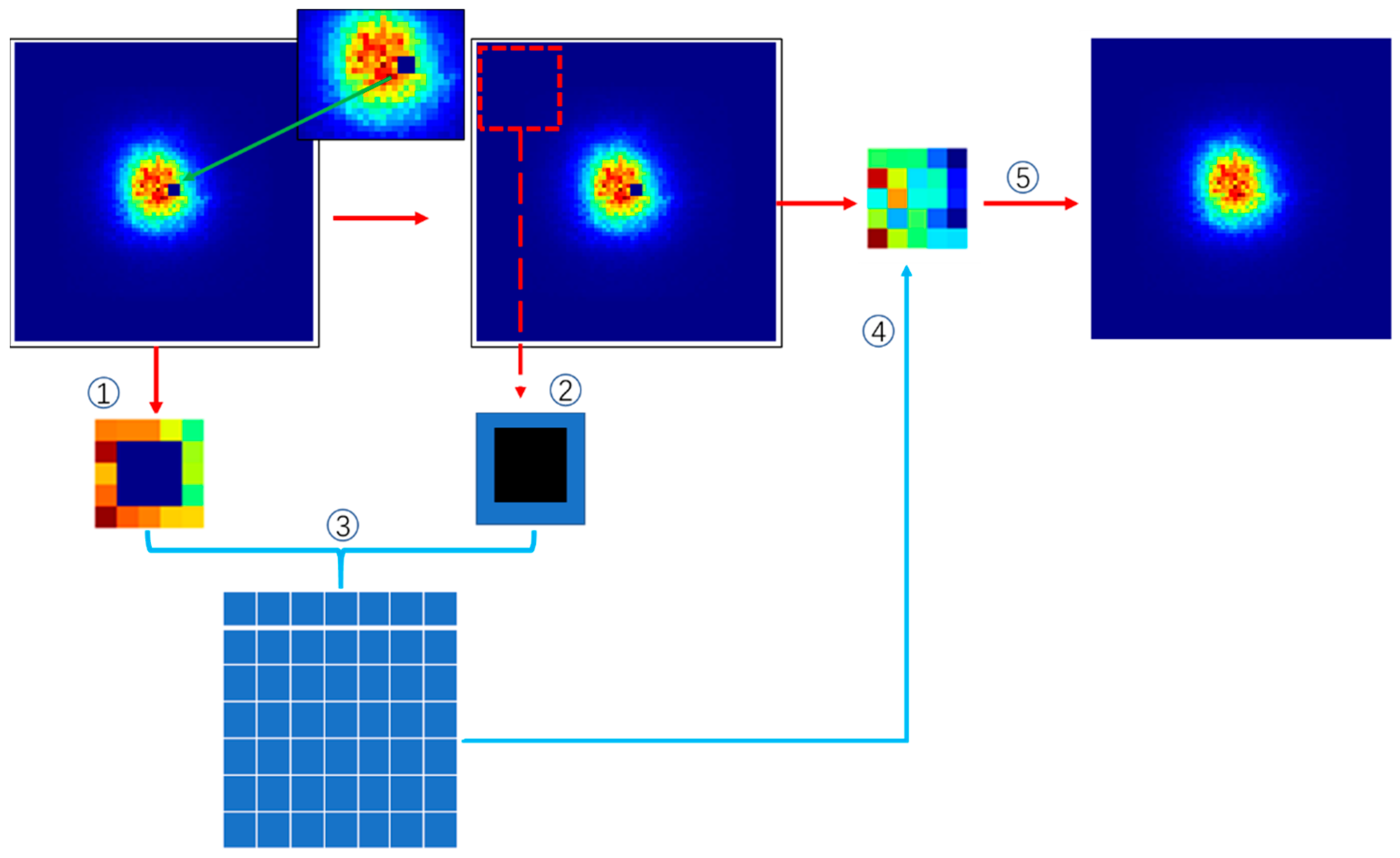
2.2. Failure Point Repair Algorithm
3. Results
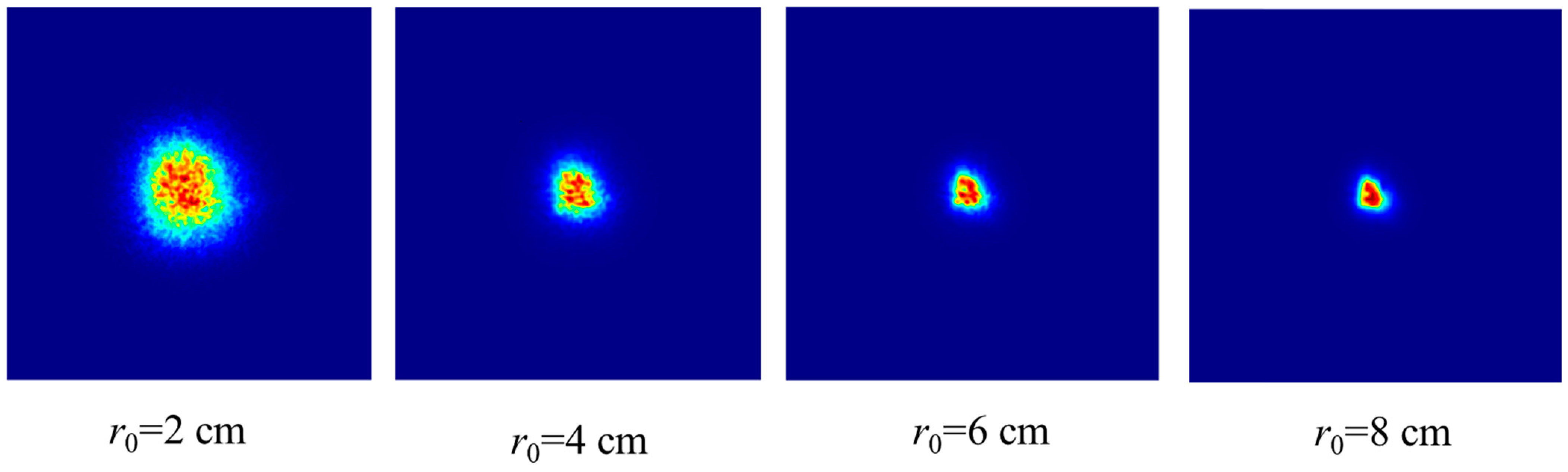
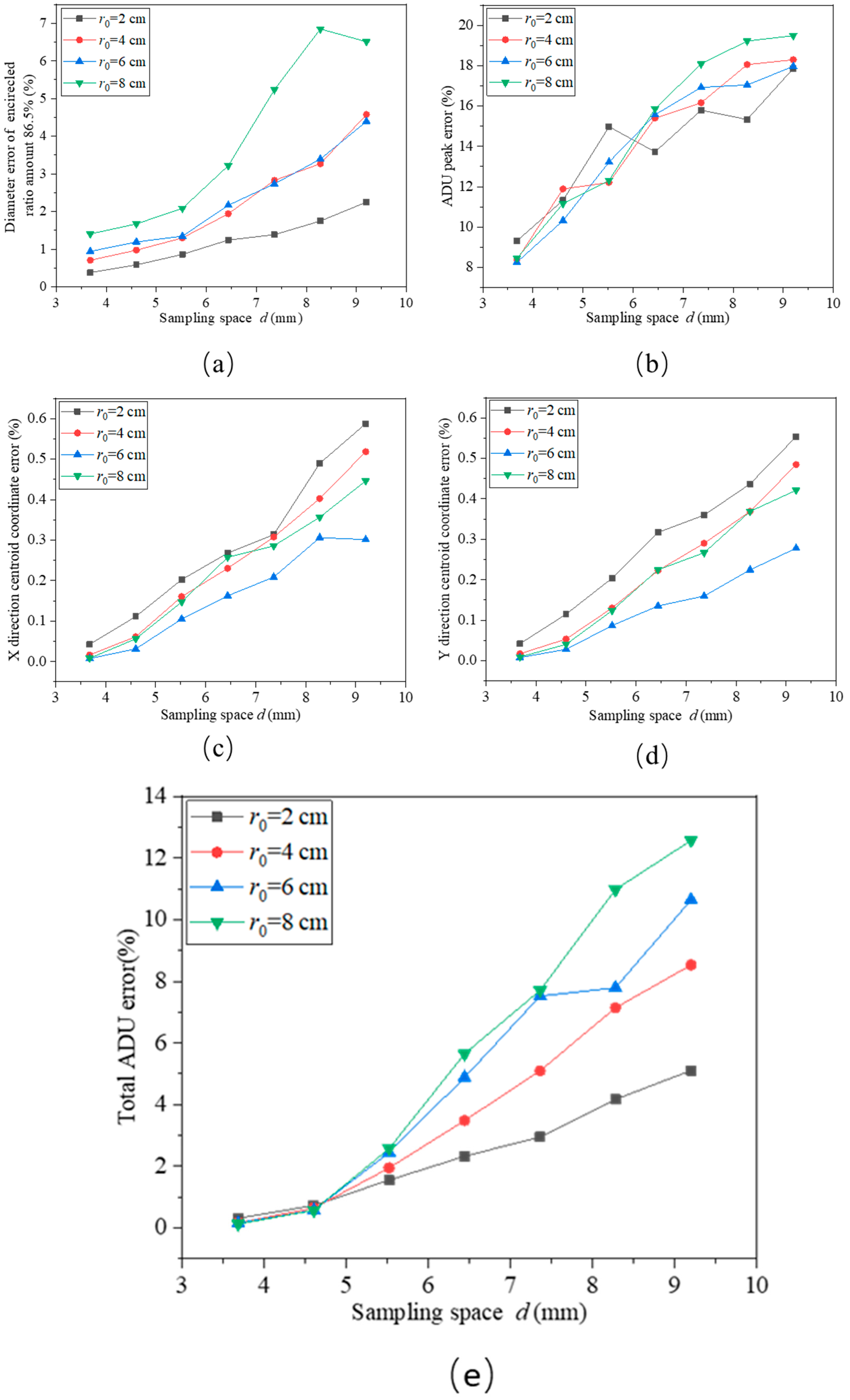
3.1. System Sampling Resolution Analysis
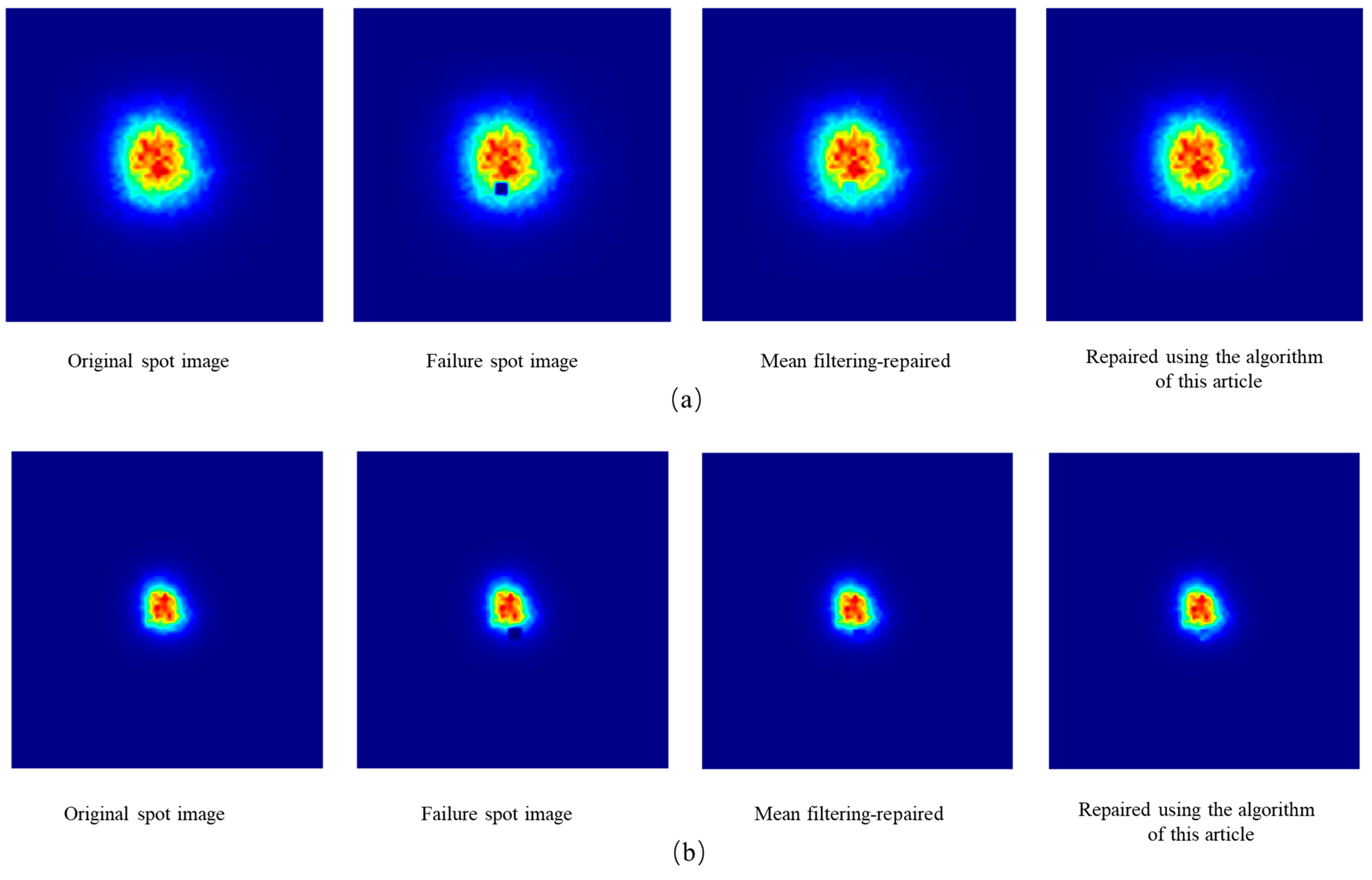
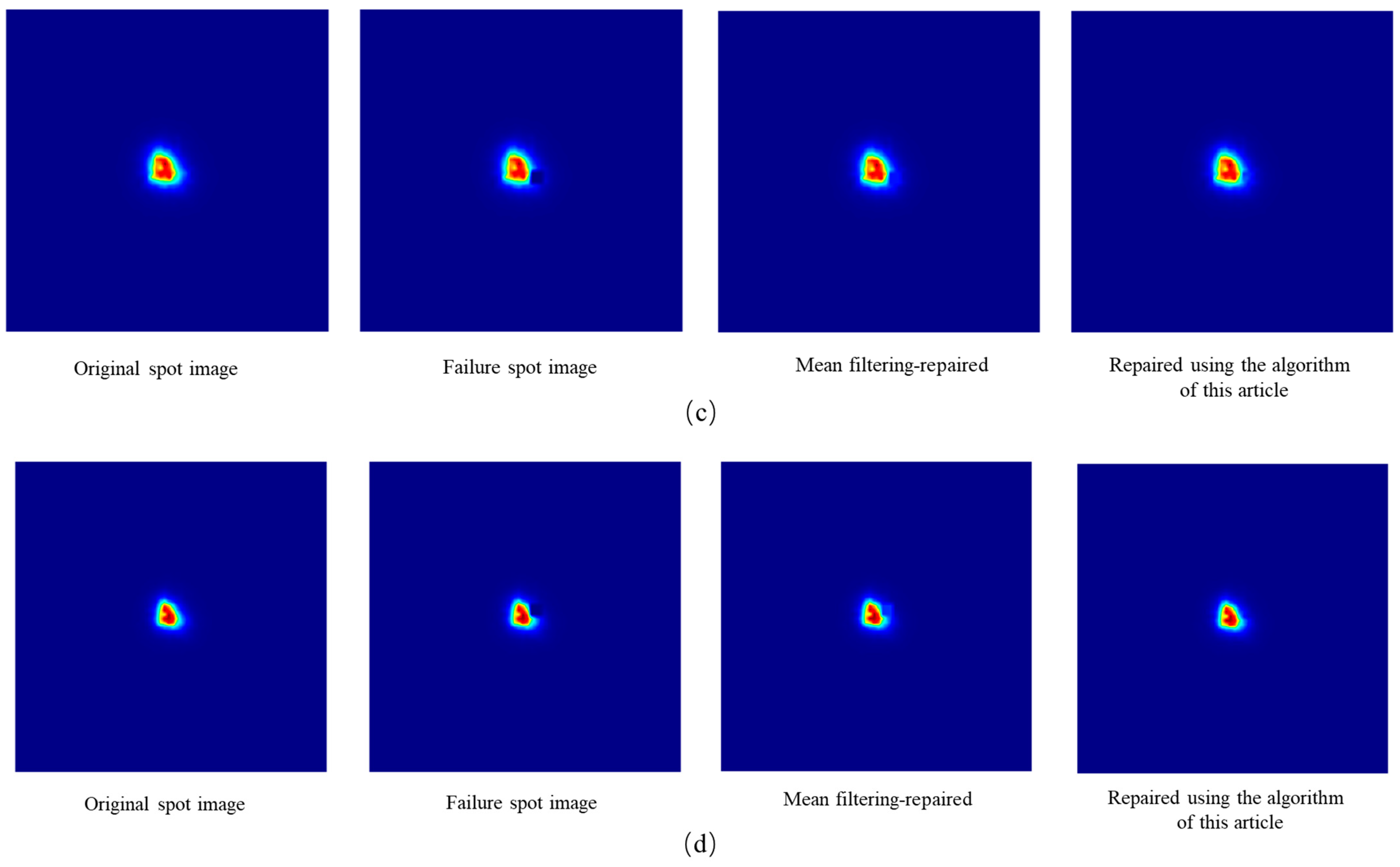
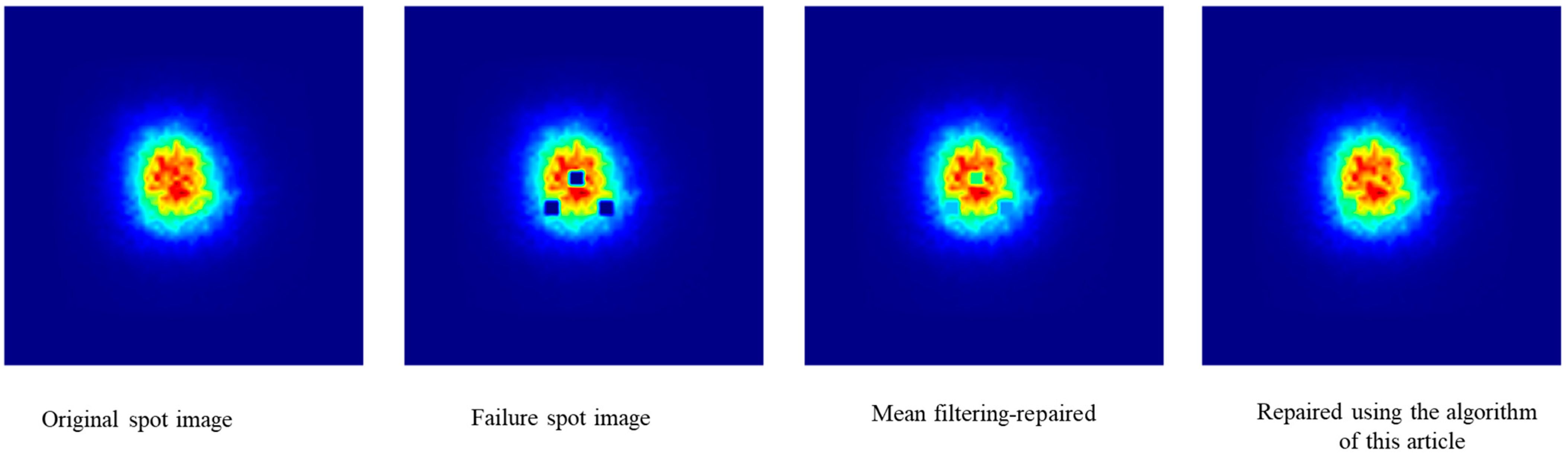
3.2. Failure Point Repair
4. Discussion
5. Conclusions
Author Contributions
Funding
Institutional Review Board Statement
Informed Consent Statement
Data Availability Statement
Conflicts of Interest
References
- Guan, W.L.; Tan, F.F.; Hou, Z.H.; Luo, J.; Qin, L.A.; He, F.; Zhang, S.L. Wide angle array detection technology for high power density laser. Acta Opt. Sin. 2022, 42, 159–166. [Google Scholar]
- Pang, M.; Rong, J.; Zhou, S.; Wu, J.; Fan, G.; Zhang, W.; Hu, X. Array detector for high energy laser based on diffuse transmission sampling. Rev. Sci. Instrum. 2014, 85, 013105. [Google Scholar] [CrossRef] [PubMed]
- Chen, C.; Li, G.; Zhang, B.; Wu, L.; Yu, D.; Yin, W. High energy laser far-field irradiance distribution measurement technology and its developments. J. Appl. Opt. 2020, 41, 675–680. [Google Scholar]
- Guan, W.; Tan, F.; Hou, Z.; Qin, L.; He, F.; Zhang, S.; Wu, Y. Design of scattering sampling attenuation unit for detector array target. Infrared Laser Eng. 2021, 50, 286–293. [Google Scholar]
- Liu, Z.J.; Pu, Z.; Xu, X. Study on universal standard for evaluating high energy beam quality. Chin. J. Lasers 2009, 36, 773–778. [Google Scholar]
- Feng, G.B.; Yang, P.L.; Wang, Z.B.; Wang, Q.S. Photoelectric-calorimetric compound beam profile detector for near-infrared high energy laser. Opt. Precis. Eng. 2013, 21, 1417–1424. [Google Scholar] [CrossRef]
- Li, F.; Shen, C.M. A fast implementation algorithm of TV inpainting model based on operator splitting method. Comput. Electr. Eng. 2011, 37, 782–788. [Google Scholar] [CrossRef]
- Thanh, D.N.H.; Prasath, V.S.; Dvoenko, S. An adaptive image inpainting method based on euler’s elastica with adaptive parameters estimation and the discrete gradient method. Signal Process. 2021, 178, 107797. [Google Scholar] [CrossRef]
- Zhang, H.Y.; Peng, Q.Z.; Wang, Y.D. Digital Image Inpainting Algorithm for Damaged Images Based on Nonlinear Anisotropic Diffusion. J. Comput.-Aided Des. Comput. Graph. 2006, 18, 1541–1546. [Google Scholar]
- Leung, S.; Osher, S. Global minimization of the active contour model with TV-inpainting and two-phase denoising. In Variational, Geometric, and Level Set Methods in Computer Vision; Springer: Berlin/Heidelberg, Germany, 2005; pp. 149–160. [Google Scholar]
- Yang, X.H.; Xu, P.; Jin, H.Y. Low-rank tensor completion with fractional-Jacobian-extended tensor regularization for multi-component visual data inpainting. Digit. Signal Process. 2019, 95, 202571. [Google Scholar] [CrossRef]
- Zhou, Z.W.; Zhong, J. Double nuclear norm-based robust principal component analysis for image disocclusion and object detection. Neurocomputing 2016, 205, 481–489. [Google Scholar] [CrossRef]
- Bai, X.; Yan, C. Adaptive hash retrieval with kernel based similarity. Pattern Recognit. 2018, 75, 136–148. [Google Scholar] [CrossRef]
- Chen, L.; Yuan, C.G.; Qin, X. Contrastive structure and texture fusion for image inpainting. Neurocomputing 2023, 536, 1–12. [Google Scholar] [CrossRef]
- Bertalmio, M.; Vese, L. Simultaneous structure and texture image inpainting. IEEE Trans. Image Process. 2003, 12, 882–889. [Google Scholar] [CrossRef] [PubMed]
- Ding, D.; Ram, S. Image Inpainting Using Nonlocal Texture Matching and Nonlinear Filtering. IEEE Trans. Image Process. 2019, 28, 1705–1719. [Google Scholar] [CrossRef] [PubMed]
- Li, S.T.; Zhao, M. Image inpainting with salient structure completion and texture propagation. Pattern Recognit. Lett. 2011, 32, 1256–1266. [Google Scholar] [CrossRef]
- Luo, H.Y.; Zheng, Y.H. Survey of research on image inpainting methods. J. Front. Comput. Sci. Technol. 2022, 16, 2193–2218. [Google Scholar]
- Wang, Q.N.; Chen, Y.; Zhang, N. Medical image inpainting with edge and structure priors. Measurement 2021, 185, 110027. [Google Scholar] [CrossRef]
- Criminisi, A.; Perez, P.; Toyama, K. Region filling and object removal by exemplar-based image inpainting. IEEE Trans. Image Process. 2004, 13, 1200–1212. [Google Scholar] [CrossRef]
- Ouattara, N.; Loum, G.L.; Pandry, G.K. A new image inpainting approach based on Criminisi algorithm. Int. J. Adv. Comput. Sci. Appl. 2019, 10, 423–433. [Google Scholar] [CrossRef]
- Setiadi, D.R.I.M. PSNR vs SSIM: Imperceptibility quality assessment for image steganography. Multimed. Tools Appl.-Tions 2021, 80, 8423–8444. [Google Scholar] [CrossRef]
- Zhao, D.Q.; Wang, D. Realization of real-time bad spot detection algorithm. Laser J. 2022, 43, 59–64. [Google Scholar]
- Kumar, R.; Shao, C.; Kaur, R. An improved adaptive weighted mean filtering approach for metallographic image processing. J. Intell. Syst. 2021, 30, 470–478. [Google Scholar]








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Total ADU | Centroid Coordinates | 86.5% Encircled Energy Diameter | |
|---|---|---|---|
| r0 = 2 cm | |||
| Original image | 1,339,177 | (226.60, 230.10) | 220 |
| Contains failure points image | 1,314,216 | (226.72, 229.32) | 222 |
| Processed using mean filtering algorithm | 1,329,823 | (226.64, 229.82) | 220 |
| Processed using the algorithm in this article | 1,338,153 | (226.60, 230.07) | 220 |
| r0 = 4 cm | |||
| Original image | 1,336,776 | (230.62, 232.58) | 120 |
| Contains failure points image | 1,305,693 | (230.42, 231.71) | 122 |
| Processed using mean filtering algorithm | 1,327,363 | (230.56, 232.36) | 120 |
| Processed using the algorithm in this article | 1,338,174 | (230.63, 232.67) | 120 |
| r0 = 6 cm | |||
| Original image | 1,337,314 | (232.13, 233.69) | 88 |
| Contains failure points image | 1,268,275 | (230.80, 233.08) | 90 |
| Processed using mean filtering algorithm | 1,309,551 | (231.68, 233.47) | 90 |
| Processed using the algorithm in this article | 1,318,116 | (231.81, 233.56) | 88 |
| r0 = 8 cm | |||
| Original image | 1,339,797 | (232.97, 234.37) | 72 |
| Contains failure points image | 1,265,863 | (232.02, 234.74) | 74 |
| Processed using mean filtering algorithm | 1,330,345 | (233.10, 234.28) | 72 |
| Processed using the algorithm in this article | 1,338,480 | (232.87, 234.39) | 72 |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Cheng, Y.; Wang, G.; Tan, F.; He, F.; Qin, L.; Huang, Z.; Hou, Z. Spot Invalid Point Repair Algorithm of Detector Array Measurement System Based on Image Correlation Coefficient. Photonics 2023, 10, 1105. https://doi.org/10.3390/photonics10101105
Cheng Y, Wang G, Tan F, He F, Qin L, Huang Z, Hou Z. Spot Invalid Point Repair Algorithm of Detector Array Measurement System Based on Image Correlation Coefficient. Photonics. 2023; 10(10):1105. https://doi.org/10.3390/photonics10101105
Chicago/Turabian StyleCheng, Yilun, Gangyu Wang, Fengfu Tan, Feng He, Laian Qin, Zhigang Huang, and Zaihong Hou. 2023. "Spot Invalid Point Repair Algorithm of Detector Array Measurement System Based on Image Correlation Coefficient" Photonics 10, no. 10: 1105. https://doi.org/10.3390/photonics10101105