
Is NSGA-II Ready for Large-Scale Multi-Objective Optimization?

 , , and
, , and 
Abstract
:1. Introduction
2. Related Work
3. Materials and Methods
3.1. Component-Based NSGA-II
| Algorithm 1 Pseudo-code of an evolutionary algorithm. |
|
3.2. Parameter Space for Auto-Configuring NSGA-II
- random: the variable takes a random value within the bounds.
- bounds: if the value is lower/higher than the lower/upper bound, the variable is assigned the lower/upper bound.
- round: if the value is lower/higher than the lower/upper bound, the variable is assigned the upper/lower bound.
3.3. Experimental Methodology
3.3.1. Scenarios
3.3.2. Auto-Configuration and Performance Assessment
- A file describing the parameter space included in Table 2.
- A set of problems used for training.
- An executable program that, for each combination of problem and configuration selected by irace, returns an indicator value so that irace can compare different configurations.
- The total number of different configurations to generate. The default value is 100,000.
3.3.3. Computing Environments
4. Results
4.1. ZDT Benchmark
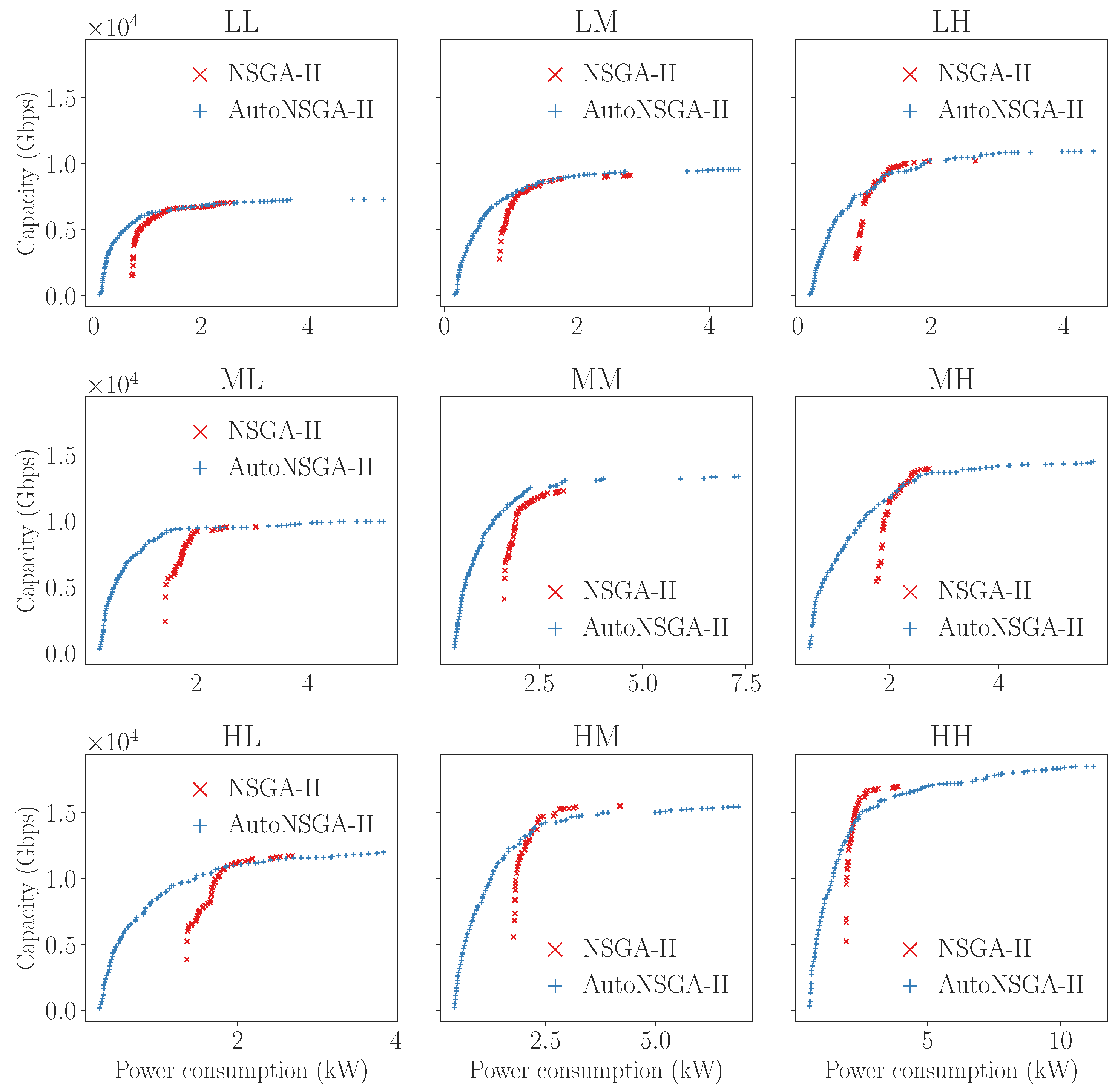
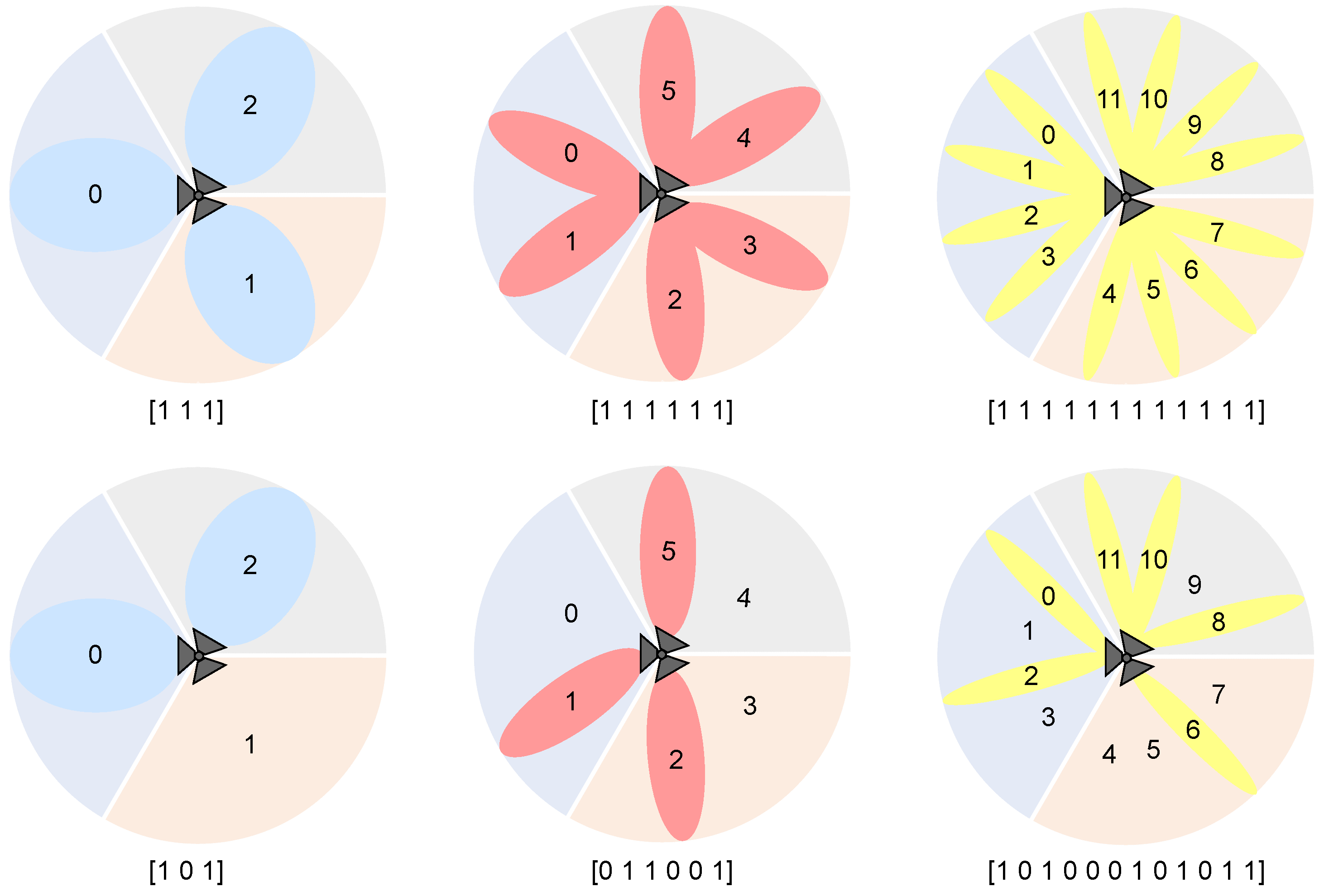
4.2. The CSO Problem
5. Conclusions
Author Contributions
Funding
Data Availability Statement
Acknowledgments
Conflicts of Interest
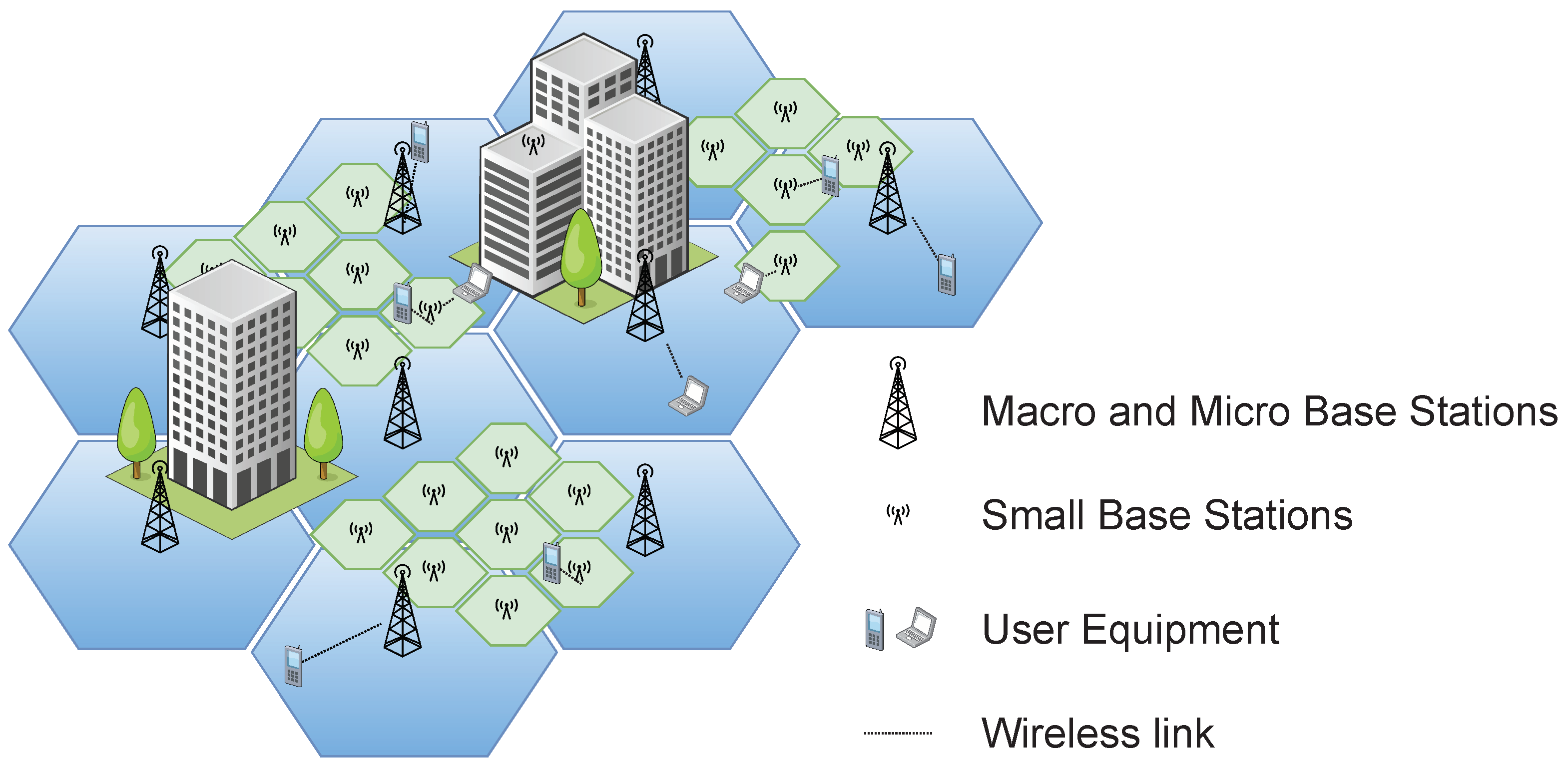
Appendix A. UDN Modeling and Instances


{kind=link}
{kind=link}
{kind=link}
| Cell | Parameter | Equation | LL | LM | LH | ML | MM | MH | HL | HM | HH |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Micro | (A2) | 12 | |||||||||
| f | (A5) | 5 GHz (BW = 500 MHz) | |||||||||
| (A8) | 15 | ||||||||||
| (A8) | 10000 | ||||||||||
| (A8) | 1 | ||||||||||
| (A8) | 1 | ||||||||||
| 8 | |||||||||||
| 2 | |||||||||||
| 300 | 300 | 300 | 600 | 600 | 600 | 900 | 900 | 900 | |||
| Pico | (A2) | 20 | |||||||||
| f | (A5) | 20 GHz (BW = 2000 MHz) | |||||||||
| (A8) | 9 | ||||||||||
| (A8) | 6800 | ||||||||||
| (A8) | 0.5 | ||||||||||
| (A8) | 1 | ||||||||||
| 64 | |||||||||||
| 4 | |||||||||||
| 1500 | 1500 | 1500 | 1800 | 1800 | 1800 | 2100 | 2100 | 2100 | |||
| Femto | (A2) | 28 | |||||||||
| f | (A5) | 68 GHz (BW = 6800 MHz) | |||||||||
| (A8) | 5.5 | ||||||||||
| (A8) | 4800 | ||||||||||
| (A8) | 0.2 | ||||||||||
| (A8) | 1 | ||||||||||
| 256 | |||||||||||
| 8 | |||||||||||
| 3000 | 3000 | 3000 | 6000 | 6000 | 6000 | 9000 | 9000 | 9000 | |||
| UEs | 1000 | 2000 | 3000 | 1000 | 2000 | 3000 | 1000 | 2000 | 3000 | ||
Problem Formulation and Objectives
References
- Deb, K.; Pratap, A.; Agarwal, S.; Meyarivan, T. A Fast and Elitist Multiobjective Genetic Algorithm: NSGA-II. IEEE Trans. Evol. Comput. 2002, 6, 182–197. [Google Scholar] [CrossRef] [Green Version]
- Li, H.; Zhang, Q. Multiobjective Optimization Problems With Complicated Pareto Sets, MOEA/D and NSGA-II. IEEE Trans. Evol. Comput. 2009, 13, 284–302. [Google Scholar] [CrossRef]
- Reyes Sierra, M.; Coello Coello, C.A. Improving PSO-Based Multi-objective Optimization Using Crowding, Mutation and ϵ-Dominance. In Evolutionary Multi-Criterion Optimization; Coello Coello, C.A., Hernández Aguirre, A., Zitzler, E., Eds.; Springer: Berlin/Heidelberg, Germany, 2005; pp. 505–519. [Google Scholar]
- Nebro, A.J.; Durillo, J.J.; García-Nieto, J.; Coello, C.A.C.; Luna, F.; Alba, E. SMPSO: A new PSO-based metaheuristic for multi-objective optimization. In Proceedings of the 2009 IEEE Symposium on Computational Intelligence in Multi-Criteria Decision-Making (MCDM 2009), Nashville, TN, USA, 30 March–2 April 2009; pp. 66–73. [Google Scholar] [CrossRef]
- Zavala, G.R.; Nebro, A.J.; Luna, F.; Coello, C.A.C. A survey of multi-objective metaheuristics applied to structural optimization. Struct. Multidiscip. Optim. 2014, 49, 537–558. [Google Scholar] [CrossRef]
- Becerra, D.; Sandoval, A.; Restrepo-Montoya, D.; Nino, L.F. A parallel multi-objective Ab initio approach for protein structure prediction. In Proceedings of the 2010 IEEE International Conference on Bioinformatics and Biomedicine, Houston, TX, USA, 9–12 December 2010; pp. 137–141. [Google Scholar]
- Fang, W.; Guan, Z.; Su, P.; Luo, D.; Ding, L.; Yue, L. Multi-Objective Material Logistics Planning with Discrete Split Deliveries Using a Hybrid NSGA-II Algorithm. Mathematics 2022, 10, 2871. [Google Scholar] [CrossRef]
- Turkson, R.F.; Yan, F.; Ahmed Ali, M.K.; Liu, B.; Hu, J. Modeling and multi-objective optimization of engine performance and hydrocarbon emissions via the use of a computer aided engineering code and the NSGA-II genetic algorithm. Sustainability 2016, 8, 72. [Google Scholar] [CrossRef] [Green Version]
- Adenso-Díaz, B.; Laguna, M. Fine-tuning of algorithms using fractional experimental designs and local search. Oper. Res. 2006, 54, 99–114. [Google Scholar] [CrossRef] [Green Version]
- Durillo, J.; Nebro, A. jMetal: A Java framework for multi-objective optimization. Adv. Eng. Softw. 2011, 42, 760–771. [Google Scholar] [CrossRef]
- Nebro, A.; Durillo, J.J.; Vergne, M. Redesigning the jMetal Multi-Objective Optimization Framework. In Proceedings of the Companion Publication of the 2015 Annual Conference on Genetic and Evolutionary Computation (GECCO Companion ’15), Madrid, Spain, 11–15 July 2015; ACM: New York, NY, USA, 2015; pp. 1093–1100. [Google Scholar] [CrossRef]
- López-Ibáñez, M.; Dubois-Lacoste, J.; Pérez Cáceres, L.; Stützle, T.; Birattari, M. The irace package: Iterated Racing for Automatic Algorithm Configuration. Oper. Res. Perspect. 2016, 3, 43–58. [Google Scholar] [CrossRef]
- Zitzler, E.; Deb, K.; Thiele, L. Comparison of Multiobjective Evolutionary Algorithms: Empirical Results. Evol. Comput. 2000, 8, 173–195. [Google Scholar] [CrossRef] [PubMed] [Green Version]
- Blot, A.; Hoos, H.H.; Jourdan, L.; Kessaci-Marmion, M.É.; Trautmann, H. MO-ParamILS: A Multi-objective Automatic Algorithm Configuration Framework. In Learning and Intelligent Optimization; Festa, P., Sellmann, M., Vanschoren, J., Eds.; Springer International Publishing: Cham, Switzerland, 2016; pp. 32–47. [Google Scholar]
- Bezerra, L.C.T.; López-Ibáñez, M.; Stützle, T. Automatic Component-Wise Design of Multiobjective Evolutionary Algorithms. IEEE Trans. Evol. Comput. 2016, 20, 403–417. [Google Scholar] [CrossRef] [Green Version]
- Bezerra, L.C.T.; López-Ibáñez, M.; Stützle, T. Automatically Designing State-of-the-Art Multi- and Many-Objective Evolutionary Algorithms. Evol. Comput. 2020, 28, 195–226. [Google Scholar] [CrossRef] [PubMed]
- Nebro, A.J.; López-Ibáñez, M.; Barba-González, C.; García-Nieto, J. Automatic Configuration of NSGA-II with jMetal and Irace; Association for Computing Machinery, Inc.: New York, NY, USA, 2019; pp. 1374–1381. [Google Scholar] [CrossRef] [Green Version]
- Huband, S.; Barone, L.; While, R.; Hingston, P. A Scalable Multi-objective Test Problem Toolkit. In Proceedings of the Third International Conference on Evolutionary MultiCriterion Optimization, EMO 2005, Guanajuato, Mexico, 9–11 March 2005; Coello, C., Hernández, A., Zitler, E., Eds.; Springer: Berlin, Germany, 2005. Lecture Notes in Computer Science. Volume 3410, pp. 280–295. [Google Scholar]
- Deb, K.; Thiele, L.; Laumanns, M.; Zitzler, E. Scalable Test Problems for Evolutionary Multiobjective Optimization. In Evolutionary Multiobjective Optimization. Theoretical Advances and Applications; Abraham, A., Jain, L., Goldberg, R., Eds.; Springer: Berlin/Heidelberg, Germany, 2001; pp. 105–145. [Google Scholar]
- Durillo, J.J.; Nebro, A.J.; Coello, C.A.C.; Garcia-Nieto, J.; Luna, F.; Alba, E. A Study of Multiobjective Metaheuristics When Solving Parameter Scalable Problems. IEEE Trans. Evol. Comput. 2010, 14, 618–635. [Google Scholar] [CrossRef] [Green Version]
- Tian, Y.; Si, L.; Zhang, X.; Cheng, R.; He, C.; Tan, K.C.; Jin, Y. Evolutionary Large-Scale Multi-Objective Optimization: A Survey. ACM Comput. Surv. 2021, 54, 174. [Google Scholar] [CrossRef]
- Nebro, A.J.; Luna, F.; Alba, E.; Dorronsoro, B.; Durillo, J.J.; Beham, A. AbYSS: Adapting Scatter Search to Multiobjective Optimization. IEEE Trans. Evol. Comput. 2008, 12, 439–457. [Google Scholar] [CrossRef]
- Bohli, A.; Bouallegue, R. How to Meet Increased Capacities by Future Green 5G Networks: A Survey. IEEE Access 2019, 7, 42220–42237. [Google Scholar] [CrossRef]
- Lopez-Perez, D.; Ding, M.; Claussen, H.; Jafari, A.H. Towards 1 Gbps/UE in Cellular Systems: Understanding Ultra-Dense Small Cell Deployments. IEEE Commun. Surv. Tutorials 2015, 17, 2078–2101. [Google Scholar] [CrossRef] [Green Version]
- González González, D.; Mutafungwa, E.; Haile, B.; Hämäläinen, J.; Poveda, H. A Planning and Optimization Framework for Ultra Dense Cellular Deployments. Mob. Inf. Syst. 2017, 2017, 9242058. [Google Scholar] [CrossRef]
- Luna, F.; Luque-Baena, R.; Martínez, J.; Valenzuela-Valdés, J.; Padilla, P. Addressing the 5G Cell Switch-off Problem with a Multi-objective Cellular Genetic Algorithm. In Proceedings of the IEEE 5G World Forum, 5GWF 2018—Conference Proceedings, Silicon Valley, CA, USA, 9–11 July 2018; pp. 422–426. [Google Scholar] [CrossRef] [Green Version]
- Luna, F.; Zapata-Cano, P.H.; González-Macías, J.C.; Valenzuela-Valdés, J.F. Approaching the cell switch-off problem in 5G ultra-dense networks with dynamic multi-objective optimization. Future Gener. Comput. Syst. 2020, 110, 876–891. [Google Scholar] [CrossRef]
- Zille, H.; Ishibuchi, H.; Mostaghim, S.; Nojima, Y. Mutation operators based on variable grouping for multi-objective large-scale optimization. In Proceedings of the 2016 IEEE Symposium Series on Computational Intelligence (SSCI), Athens, Greece, 6–9 December 2016; pp. 1–8. [Google Scholar] [CrossRef]
- Knowles, J. A summary-attainment-surface plotting method for visualizing the performance of stochastic multiobjective optimizers. In Proceedings of the 5th ISDA, Washington, DC, USA, 8–10 September 2005; pp. 552–557. [Google Scholar]
- Vucetic, B.; Yuan, J. Performance Limits of Multiple-Input Multiple-OutputWireless Communication Systems. In Space-Time Coding; John Wiley & Sons, Ltd.: Hoboken, NJ, USA, 2005; chapter 1; pp. 1–47. [Google Scholar]
- Piovesan, N.; Fernandez Gambin, A.; Miozzo, M.; Rossi, M.; Dini, P. Energy sustainable paradigms and methods for future mobile networks: A survey. Comput. Commun. 2018, 119, 101–117. [Google Scholar] [CrossRef]
- Son, J.; Kim, S.; Shim, B. Energy Efficient Ultra-Dense Network Using Long Short-Term Memory. In Proceedings of the 2020 IEEE Wireless Communications and Networking Conference (WCNC), Seoul, Republic of Korea, 25–28 May 2020; pp. 1–6. [Google Scholar]


| Solutions Creation | Evaluation | Termination |
|---|---|---|
| - Random - Latin hypercube sampling - Scatter search | - Sequential - Multithreaded | - By evaluations - By time - By keyboard - By quality indicator |
| Selection | Variation | Replacement |
| - N-ary tournament - Random - Neighbour - Differential evolution | - Crossover and mutation - Differential evolution | - Ranking and density estimator - - |
| Parameter | Domain |
|---|---|
| algorithmResult | {externalArchive, population} |
| populationSizeWithArchive | [10, 200] s.t. algorithmResult == externalArchive |
| externalArchive | crowdingDistanceArchive s.t. algorithmResult == externalArchive |
| offspringPopulationSize | [1, 400] |
| selection | {tournament, random} |
| selectionTournamentSize | (2, 10) s.t. selection == tournament |
| Real-coded variables | |
| createInitialSolutions | {random, latinHypercubeSampling, scatterSearch} |
| variation | crossoverAndMutationVariation |
| crossover | {SBX, BLX_ALPHA} |
| crossoverProbability | [0.0, 1.0] |
| crossoverRepairStrategy | {random, round, bounds} |
| sbxDistributionIndex | [5.0, 400.0] s.t. crossover == SBX |
| blxAlphaCrossoverAlphaValue | [0.0, 1.0] s.t. crossover == BLX_ALPHA |
| mutation | {uniform, polynomial, linkedPolynomial, nonUniform} |
| mutationProbabilityFactor | [0.0, 2.0] |
| mutationRepairStrategy | {random, round, bounds} |
| polynomialMutationDistributionIndex | [5.0, 400.0] s.t. mutation ∈ {polynomial, linkedPolinomial} |
| uniformMutationPerturbation | [0.0, 1.0] s.t. mutation == uniform |
| nonUniformMutationPerturbation | [0.0, 1.0] s.t. mutation == nonUniform |
| Binary-coded variables | |
| createInitialSolutions | random |
| variation | crossoverAndMutationVariation |
| crossover | {singlePoint, HUX, uniform} |
| crossoverProbability | [0.0, 1.0] |
| mutation | {bitflip} |
| mutationProbabilityFactor | [0.0, 2.0] |
| Default Settings for NSGA-II | Settings of AutoNSGA-II |
|---|---|
| algorithmResult: population | algorithmResult: externalArchive |
| populationSize: 100 | populationSizeWithArchive: 56 |
| offspringPopulationSize: 100 | offspringPopulationSize: 14 |
| variation: crossoverAndMutationVariation | variation: crossoverAndMutationVariation |
| crossover: SBX | crossover: BLX_ALPHA |
| crossoverProbability: 0.9 | crossoverProbability: 0.88 |
| crossoverRepairStrategy: random | crossoverRepairStrategy: bounds |
| sbxDistributionIndexValue: 20.0 | blxAlphaCrossoverAlphaValue: 0.94 |
| mutation: polynomial | mutation: nonUniform |
| mutationProbabilityFactor: 1 | mutationProbabilityFactor: 0.45 |
| mutationRepairStrategy: random | mutationRepairStrategy: round |
| polynomialMutationDistributionIndex: 20.0 | nonUniformMutationPerturbation: 0.3 |
| selection: tournament | selection: tournament |
| selectionTournamentSize: 2 | selectionTournamentSize: 9 |
| Time (h) | Evaluations | ||||
|---|---|---|---|---|---|
| Problem | Variables | NSGA-II | AutoNSGA-II | NSGA-II | AutoNSGA-II |
| ZDT1 | 2048 | 0.13 | 0.02 | 1,250,500 | 182,356 |
| 4096 | 0.51 | 0.12 | 2,906,100 | 484,356 | |
| 8192 | 2.40 | 0.50 | 6,622,600 | 1,039,156 | |
| 16,384 | 11.19 | 2.15 | 14,741,200 | 2,180,656 | |
| 32,768 | - | 9.04 | - | 4,605,556 | |
| 65,356 | - | 31.66 | - | 9,494,556 | |
| 131,072 | - | 120.02 | - | 19,359,356 | |
| ZDT2 | 2048 | 0.14 | 0.02 | 1,472,800 | 164,756 |
| 4096 | 0.62 | 0.10 | 3,433,100 | 429,156 | |
| 8192 | 2.77 | 0.49 | 7,676,600 | 986,556 | |
| 16,384 | 12.30 | 2.28 | 17,059,600 | 2,358,056 | |
| 32,768 | - | 9.28 | - | 4,736,056 | |
| 65,356 | - | 39.19 | - | 10,081,856 | |
| 131,072 | - | 138.85 | - | 21,703,556 | |
| ZDT3 | 2048 | 0.10 | 0.03 | 1,089,800 | 253,356 |
| 4096 | 0.47 | 0.16 | 2,514,200 | 610,956 | |
| 8192 | 2.08 | 0.62 | 5,463,000 | 1,267,656 | |
| 16,384 | 9.18 | 2.68 | 11,877,500 | 2,820,556 | |
| 32,768 | - | 11.39 | - | 6,158,256 | |
| 65,356 | - | 40.69 | - | 11,912,856 | |
| 131,072 | - | - | - | - | |
| ZDT4 * | 2048 | - | 2.62 | - | 21,746,882 |
| ZDT6 | 2048 | 0.45 | 0.04 | 5,401,100 | 291,856 |
| 4096 | 1.82 | 0.16 | 11,482,400 | 659,956 | |
| 8192 | 7.16 | 0.66 | 24,897,300 | 1,374,056 | |
| 16,384 | - | 3.08 | - | 3,221,156 | |
| 32,768 | - | 15.51 | - | 7,941,156 | |
| 65,356 | - | 63.79 | - | 17,685,556 | |
| 131,072 | - | - | - | - | |
| Default Settings for NSGA-II | Settings of AutoNSGA-II |
|---|---|
| algorithmResult: population | algorithmResult: externalArchive |
| populationSize: 100 | populationSizeWithArchive: 93 |
| offspringPopulationSize: 100 | offspringPopulationSize: 32 |
| variation: crossoverAndMutationVariatio | variation: crossoverAndMutationVariation |
| crossover: singlePoint | crossover: singlePloint |
| crossoverProbability: 0.90 | crossoverProbability: 0.89 |
| mutation: bitFlip | mutation: bitFlip |
| mutationProbabilityFactor: 1 | mutationProbabilityFactor: 1.7 |
| selection: tournament | selection: tournament |
| selectionTournamentSize: 2 | selectionTournamentSize: 9 |
| NSGA-II | AutoNSGA-II | |
|---|---|---|
| LL | ||
| LM | ||
| LH | ||
| ML | ||
| MM | ||
| MH | ||
| HL | ||
| HM | ||
| HH |
Publisher’s Note: MDPI stays neutral with regard to jurisdictional claims in published maps and institutional affiliations. |
© 2022 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Nebro, A.J.; Galeano-Brajones, J.; Luna, F.; Coello Coello, C.A. Is NSGA-II Ready for Large-Scale Multi-Objective Optimization? Math. Comput. Appl. 2022, 27, 103. https://doi.org/10.3390/mca27060103
Nebro AJ, Galeano-Brajones J, Luna F, Coello Coello CA. Is NSGA-II Ready for Large-Scale Multi-Objective Optimization? Mathematical and Computational Applications. 2022; 27(6):103. https://doi.org/10.3390/mca27060103
Chicago/Turabian StyleNebro, Antonio J., Jesús Galeano-Brajones, Francisco Luna, and Carlos A. Coello Coello. 2022. "Is NSGA-II Ready for Large-Scale Multi-Objective Optimization?" Mathematical and Computational Applications 27, no. 6: 103. https://doi.org/10.3390/mca27060103