1. Introduction
Rechargeable lithium-ion batteries have been widely used in applications ranging from portable electronics to EVs in modern life due to their many advantages, such as their high volumetric and gravimetric energy density and low self-discharge rate [
1]. Therefore, the growth of the EV market has been very rapid.
The safety and reliability of EVs compared to those of traditional vehicles are the top concerns of EV users. However, both safety and reliability are subject to not only the battery technology but also the management system for the battery [
2]. The battery management system (BMS) has become one of the chief components in EVs. It provides the capability to monitor the working status of the battery and maintain all the cells within their operating limits. In particular, a BMS is expected to provide information about the three critical characteristics of a battery, namely the state of charge (SOC), the state of health (SOH), and the remaining useful life (RUL) [
3].
The SOC is a measure of the remaining capacity of the battery. Due to the inherent chemical reactions of a battery, it is difficult to obtain a fully accurate value. There are two approaches to determining the SOC. The first is the direct approach, such as coulomb counting, which simply measures the remaining capacity by using the current integration [
4]. On the other hand, indirect methods usually investigate the relationship between the SOC and some other electrical parameters such as open-circuit voltage (OCV) and impedance [
5].
Traditional approaches to battery health management have mostly focused on SOC problems. However, in recent years, attention has increasingly been paid to the SOH and RUL. The SOH is a measure of a battery’s capability to deliver its specified output. Unlike the SOC, there is no clear-cut definition of the SOH [
2].
The RUL refers to the available service time left before a system degrades to an unacceptable level [
6], which is the EOL of the battery. It has also been suggested that when using an EV battery, an indicator
is 0% when the battery capacity decreases to a certain level (70% or 80% of the nominal capacity is often considered to be the failure threshold) [
7]. Below is the equation.
where
is the rated capacity and
is the actual capacity of the battery that is degraded.
is the capacity of the failure threshold. Therefore, the RUL indicates the remaining time or the number of load cycles until the battery reaches an
of 0%.
A general definition of SOH is that it reflects the performance of a battery relative to its fresh condition. Therefore, the SOH is defined as 100% for a fresh cell and 0% for a cell that has reached the limitations of the end of life (EOL) [
8]. Typically, the following equation in percentage form is used:
We note that the capacity, which quantifies the available energy stored in a fully charged Li-ion battery cell, is the indicator used most frequently to measure the SOH. However, it is not the only one. For example, Zhou et al. [
9] proposed a novel health indicator that is formed by a series of battery discharging voltages.
Most previous works in RUL prediction used Equation (
2) to measure SOH such as the NASA dataset we use in the following sections. We therefore use Equation (
2) in this paper and employ a failure threshold of 70%.
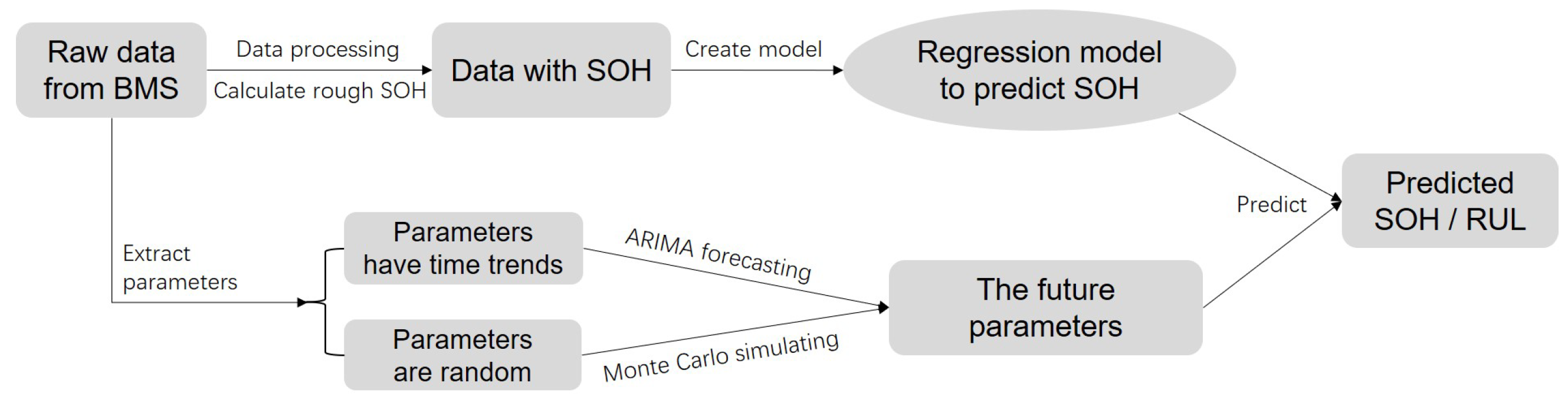
Figure 1 shows the relationship between the critical characteristics of a battery. The raw data from BMSs can be used to estimate the parameters or create models for specific purposes. Various studies focus on estimating the capacity and use it to estimate the SOC and SOH. When the SOH is determined, there are many methods of computing the probability density function (PDF) of the EOL so that the RUL can be predicted. Moreover, this paper introduces some real-world parameters such as driving behavior and environmental information that supplement SOH estimation and RUL prediction.
Barré et al. [
10] divided the existing models for battery RUL prediction into five types: (1) electrochemical models, (2) equivalent circuit-based models, (3) performance-based models, (4) analytical models with empirical fitting, and (5) statistical approaches. Zhao et al. [
11] simplified them into three parts: (1) electrochemical models, which need to use physical equations and are usually complex; (2) equivalent circuit-based models, such as particle filtering (PF) and other filtering methods; and (3) statistical models, which use data-driven methods without needing any prior knowledge about the battery aging mechanisms.
It is difficult to use physical equations and electrochemical reactions to obtain a reliable model. Most recent studies have focused on the last two types, namely model-based methods and data-driven methods. Model-based methods can be divided into two types: empirical equations and electrochemical principles [
12]. Data-driven methods can be divided into two categories according to type of data. One is direct condition monitoring data, which are the data that can describe the underlying state of the system directly. We can use regression-based models, Wiener processes, gamma processes, and Markovian-based models to deal with them. On the other hand, for models based on indirect condition monitoring data, we include stochastic filtering-based models, covariate-based hazard models, hidden Markov models (HMMs), and hidden semi-Markov models (HSMMs) [
13].
Zheng and Fang [
14] indicated that the approaches that are purely model-based filtering and those that are purely data-driven have their respective limitations. They proposed hybrid approaches that incorporate model-based filtering approaches and data-driven approaches and classified them into three types: (1) models that compensate for the physical state/measurement model, (2) approaches to predict future trends in measurement values, and (3) methods to estimate the model parameters for the physical-based methods to predict.
Rather than data-driven methods, the model-based filtering techniques that feature closed-loop expressions can self-correct and overcome unexpected disturbances [
15]. A Kalman filter–based prognostic method was developed to predict the battery RUL in 2009 [
16]. Dong et al. [
17] improved the standard particle filter and developed an SVR-PF that introduced novel capacity degradation parameters to determine the battery health in real time in 2014. Zhang et al. [
18] proposed an improved unscented particle filtering (IUPF) method for lithium-ion battery RUL prediction based on the Markov chain Monte Carlo (MCMC) method in 2017. Duong and Raghavan [
19] introduced a Heuristic Kalman algorithm in 2018, a metaheuristic optimization approach, that was combined with particle filtering to tackle sample degeneracy. Zhang et al. [
20] presented an improved PF algorithm in 2018 based on linear optimizing combination resampling (U-LOCR-PF) to improve prediction accuracy. Ma et al. [
21] developed a Gauss–Hermite particle filter (GHPF) to update the parameters of the capacity degradation model in real time and predict the RUL in 2019. Li et al. [
22] developed an inheritance PF by using the genetic algorithm framework in 2019.
Data-driven methods can capture the inherent relationships and learn the trends present in the data to provide RUL predictions. They do not require specific knowledge of material properties, constructions, or failure mechanisms, and they do not involve the development of high-level physical models of the system; therefore, they have become increasingly popular for Li-ion battery RUL prediction [
23]. Ng et al. [
24] proposed a naive Bayes (NB) model for the RUL prediction of batteries under different operating conditions in 2014. Patil et al. [
25] transformed the RUL into a classification problem in 2015 so that some machine learning methods could be used to estimate the RUL level. Zhou and Huang [
26] proposed a novel approach that combines empirical mode decomposition (EMD) and the autoregressive integrated moving average (ARIMA) model in 2016. Zhang et al. [
27] developed an RUL-prediction method in 2019 based on the Box–Cox transformation (BCT) and Monte Carlo (MC) simulation.
In recent years, deep learning has become very popular in all fields. Wu et al. [
28] investigated the relationship between the RUL and the charge curve and simulated it in 2016 using a feed-forward neural network (FFNN) due to its simplicity and effectiveness. Zhang et al. [
29] employed the long short-term memory (LSTM) recurrent neural network (RNN) in 2018 to learn the long-term dependencies among the degraded capacities of lithium-ion batteries. Khumprom and Yodo [
30] presented a deep neural network (DNN) approach in 2019 to predict the SOH and the RUL.
In addition to the general parameters extracted from monitoring data, some other methods deserve attention. Chen et al. [
31] presented a geometrical approach to Li-ion battery capacity estimation in 2014. They utilized four geometrical features that are sensitive to slight changes and degradation in performance. Wang et al. [
32] found that different discharge rates (DDRs) affect both usable battery capacity and battery degradation rates. They designed an experiment to collect accelerated battery life testing data for DDRs in 2017, which were used to investigate how DDRs influence usable battery capacity.
Besides the aging of batteries, calendar aging (i.e., aging at rest) is also very important since parking time can reach 90% of the total vehicle lifetime. Eddahech et al. [
33] presented a method for the calendar aging quantification of power batteries taking into account the SOC and temperature effects.
In the real world, the relation between battery parameters and the RUL is more complicated. The condition of a Li-ion battery is affected by the road conditions, environmental temperatures, charge modes, and even the driver’s behavior. Nuhic et al. [
34] used real-word data to estimate SOH and RUL but lack applicable data and thus are based on uniform tests. Canals et al. [
35] extracted temperature, voltage, current, and energy exchanges data from on-board data-loggers installed in an EV and calculated the internal resistance and voltage recovery, so that the SOH can be estimated.
However, few of them are suitable for real-world data. There are several difficulties: (1) battery capacity is not easy to obtain in the real world; (2) most of these methods use individual data for each battery, and the computing processes are difficult perform in the cloud; (3) there is a lack of approaches for real-time SOH estimating and RUL prediction.
Many studies mentioned above focused on creating models for batteries separately. Indeed, these are accurate approaches if data are sufficient. Most automobiles do not have enough computing power to improve computing speed and save resources. This paper proposes to create an aggregated model for all of the vehicle data and use personalization parameters to reflect the individual characteristics.
This paper attempts to introduce more influencing factors for RUL prediction based on real-world data and proposes an online data-driven approach to rapidly estimating the SOH and RUL. The required CPU time was short enough to meet the daily usage after the real-world data were implemented for an online process of RUL prediction. Alhelou et al. [
36] discussed the contribution of EVs in supporting the frequency control in power systems, and the feasibility and precision of the RUL prediction model of EVs can help to overcome the uncertainties of the electric demands.


 ,
, 













{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}