Control-Oriented Modeling and Experimental Validation of a Deoiling Hydrocyclone System


Abstract
:1. Introduction
- It has higher separation efficiency with the same pressure drop and flow rate, or
- it has the same separation efficiency, but reduced pressure drop at the same flow rate.
1.1. Hydrocyclone Separation Modeling
1.1.1. White-Box Approaches
1.1.2. Black-Box/Data Driven Approaches
- Good availability and quality of data, which often requires experiments to be performed on the facility and is a general issue for big data analysis.
- Choosing a reasonable model structure, which requires the designers to have understanding and experience of the facility system.
- Choosing a reasonable tradeoff between model complexity and computation time.
1.1.3. Grey-Box Modeling Approaches
2. Hydrocyclone Model Framework
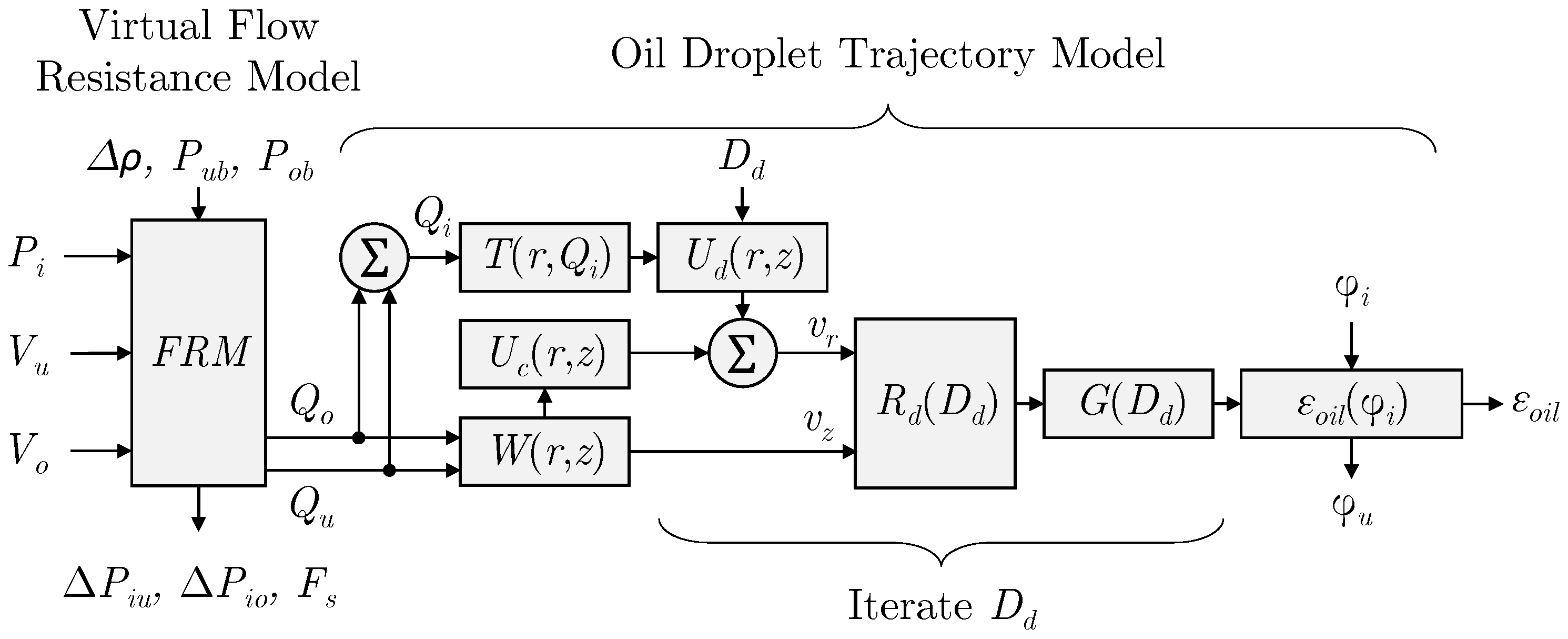
- Estimate input and output flow rates based on the virtual flow resistance model ().
- Estimate carry phase velocity fields.
- Estimate dispersed phase velocity fields.
- Iterate trajectories of dispersed phase.
- Evaluate rejection chance per dispersed phase size class.
- Estimate separation efficiency given inlet dispersed phase size distribution.
- Test-bed for controller design.
- Preliminary training for machine learning models.
- Performance evaluation.
- Fault detection and diagnosis.
- Alarm reasoning.
- Root-cause analysis.
2.1. Virtual Flow Resistance
2.2. Velocity Fields
2.2.1. Tangential Velocity
2.2.2. Axial Velocity
- Maximum axial velocity at the inner wall:constrains to have a local extremum at the hydrocyclone inner wall [56]. This assumes no boundary layer at the wall or that it is infinitesimal. In reality, this boundary layer exists as the fluid speed approaches zero when approaches one. The slow speed in the boundary layer enables "short-circuiting" of the oil droplets so that they creep along the wall towards the outlets without experiencing separation. However, accounting for the boundary layer in Equation (22) adds more complexity, which might introduce more problems/inaccuracies than it solves, as more constraints are required. Additionally, the effects of the boundary layer are likely insignificant compared to the separation that occurs in the remaining volume and not considered for this work.
- Minimum axial velocity at the center axis:constrains to have a local extrema at the hydrocyclone center axis [56]. This assumes that the fluid shear stress, , is proportional to , such that [63]. Some cases have approximated as non-zero, as in [57], other cases have it approximated, simulated, or measured as zero [32,47,52,64]. The difference of these two methods is likely small for the droplet trajectory approach, as it mainly affect the velocity very close to the center axis, and becomes increasingly similar with .
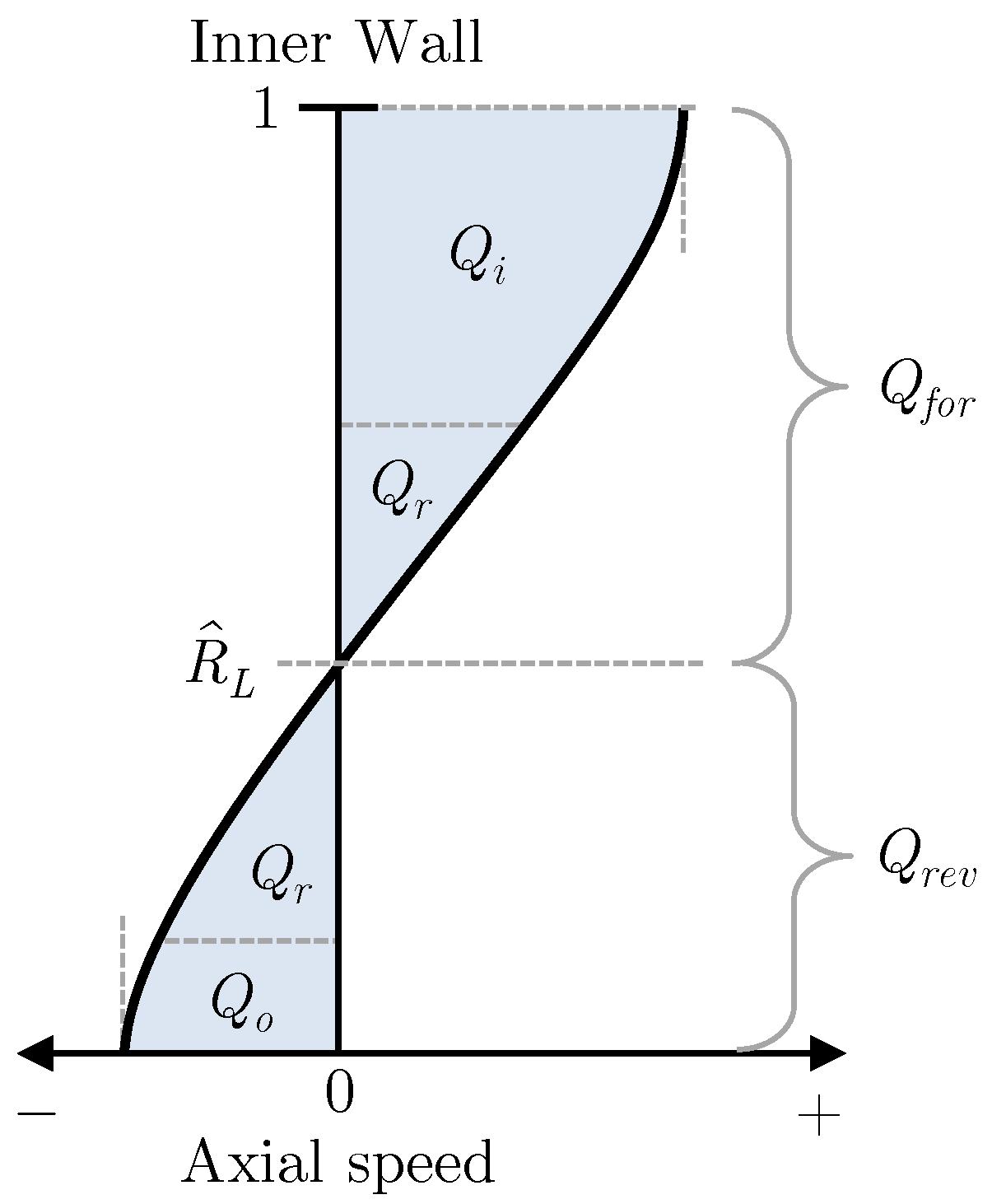
- Volume balance of the forward flow:where , , and . This is a mass balance on the outer flow region which borders the envelope of zero axial velocity () and the hydrocyclone inner wall (), assuming incompressible flow. The forward flow is illustrated in Figure 7. The part of that recirculates the hydrocyclone, , is also present in the reverse flow, . The phenomenon of a recirculation flow region as well as short circuit flow and how it is reduced by the length of the vortex finder, are well described in [48,61,65].
- Volume balance of the reverse flow:where , formulates a mass balance on the inner flow region contained to be inside the envelope of zero axial velocity and also illustrated in Figure 7. The minus sign converts the negative flow rate from integration into being positive, as a result of this work’s flow definitions. As flow across the envelope of zero axial velocity will be introduced later, these two mass balance constraints are only evaluated at , where .
2.2.3. Radial Velocity
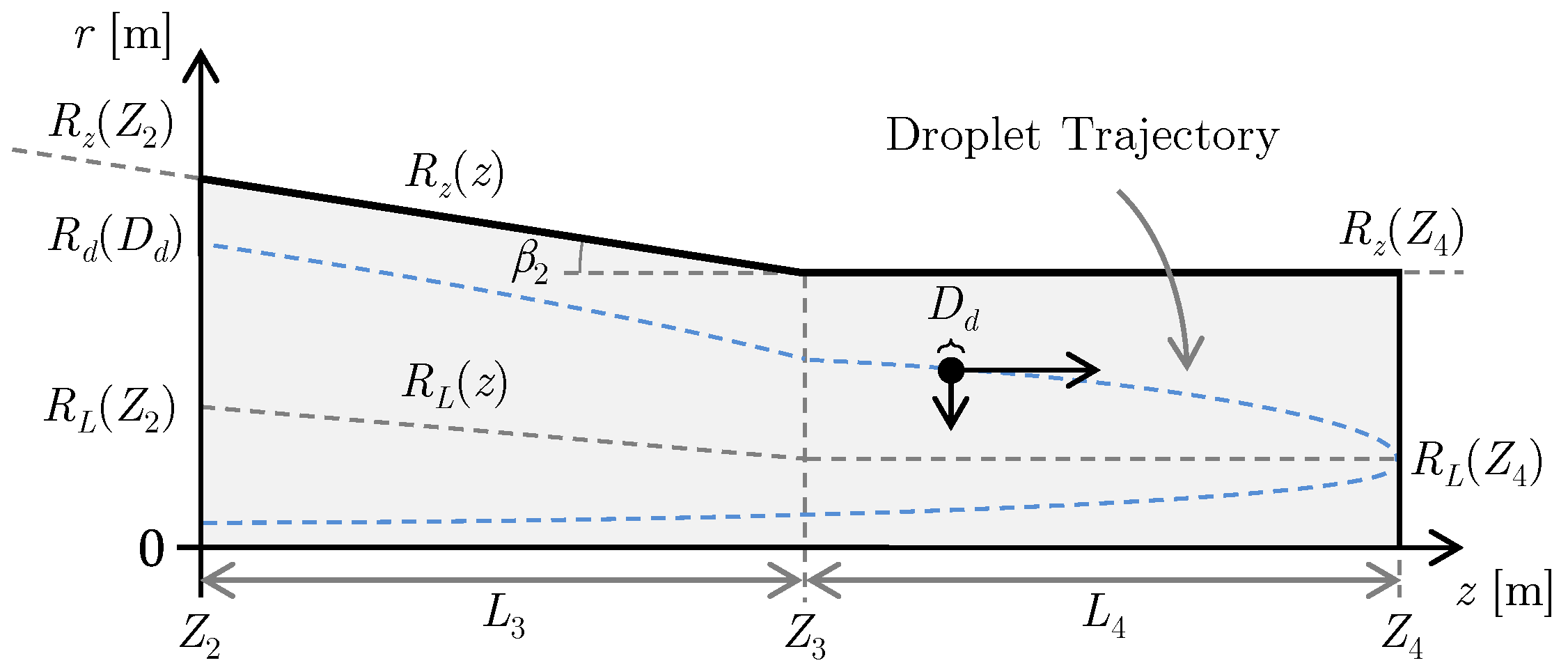
2.3. Droplet Trajectory
- starts outside will leave the underflow, or
- starts inside will leave the overflow.
2.4. Grade Efficiency
2.5. Total Efficiency
3. Hydrocyclone Model Parameters and Operation
3.1. Geometrical Parameters
3.2. Estimated Parameters
3.3. Empirical Parameters
4. Experiment Facility
- Vertical sampling.
- Facilitate flow or delta pressure control.
- Interchangeable sampling probes.
- Redundant OiW monitors.
- Short distance from the probes to the OiW monitors.
- Return: this mode returns the flow to the mainstream and can be considered less intrusive as it does not subtract/drain flow from the mainstream. Delta pressure cost is high as a result of choking .
- Discard: this mode discards the flow to the supply tank and is operationally cheaper as the pressure difference is sufficient and allows to be fully open. However, if the sampling is unfair, i.e., it extracts a higher or lower OiW concentration than the mainstream, the mainstream concentration will be affected.
5. Experiment Design
5.1. Preparing Real-Time OiW Measurements
- Sidestream flow rates within manufacturer limits.
- Constant pump speed.
- Constant mainstream flow rate.
5.2. Preparing System Mixture
- was running constantly at speed.
- was manipulated by a controller that uses as feedback to maintain a constant pressure of .
- was fully open.
- was closed to disable hydrocyclone separation effects.
5.3. Model Performance Experiments
- was constantly running at speed.
- was manipulated by a controller that uses as feedback to maintain a constant pressure of .
- had a constant opening percentage during each segment.
- was stepped from to open with a total of 15 steps maintaining each step for 35 .
- The sensor outputs, from the last 10 of each step, were averaged to obtain the steady state values.
- The first step was maintained for an additional 100 to function as initialization that allows the system to reach steady state.
- Before and after the stepping time-window, was closed, and the hydrocyclone was bypassed for a time-window of 180 , where no separation occurs.
- The time-windows of no separation were 300 instead of 180 .
- The first step was maintained for an additional 400 instead of 100 .
- Each step was maintained for 40 instead of 35 .
- 24 h prior to running the long grid experiment, additional oil was added, and the mixers engaged to continually stir at constant speed.
6. Results
6.1. Preparing Real-Time OiW Measurements
6.1.1. Validate Calibration Curve
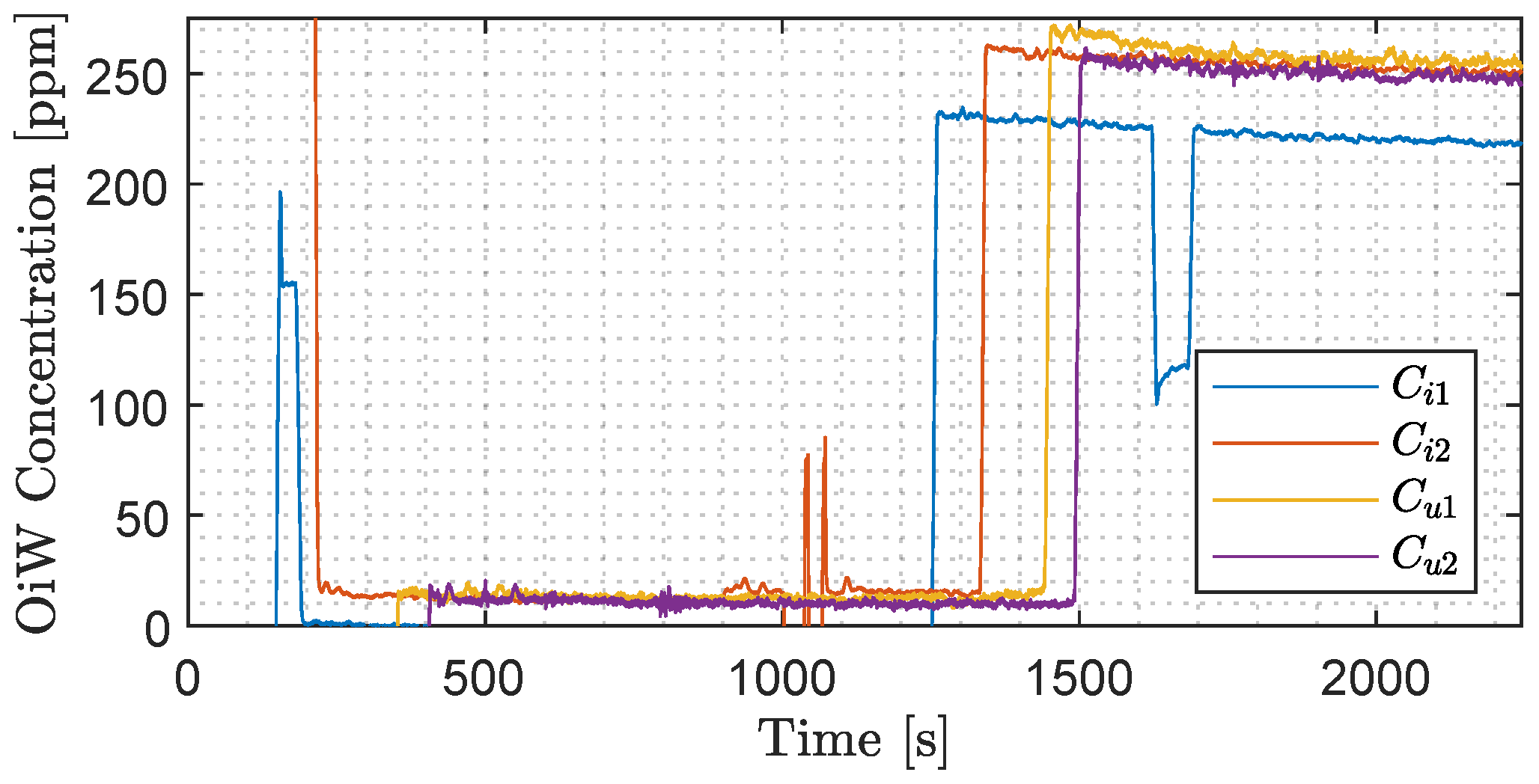
6.1.2. OiW Location Switching
6.2. Preparing System Mixture
6.2.1. Long Term Concentration Settling
6.2.2. Dead Volumes
6.2.3. Common Sidestream
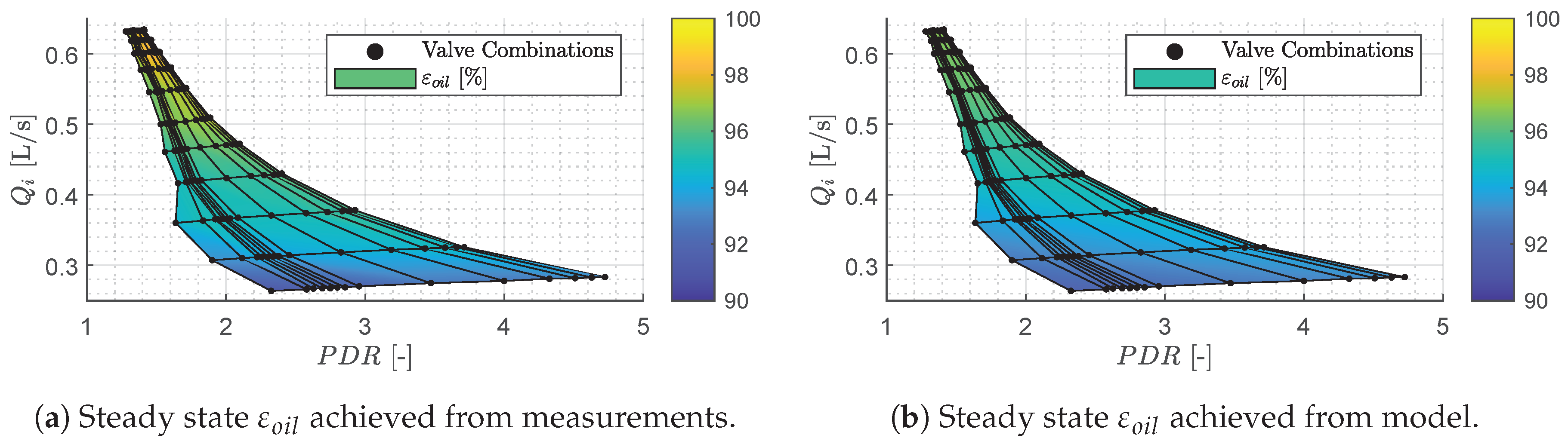
6.3. Model Performance Experiments
6.3.1. Short Grid Experiment
6.3.2. Long Grid Experiment
7. Discussion
7.1. OiW Measurement Considerations
7.2. Preparing System Mixture
- Oil accumulating or being freed from surfaces.
- Oil accumulating or being freed from dead volumes.
- Fouling and cleaning of the OiW monitors’ view cell.
- The natural separation versus forced mixing in the supply tank.
- The effects of using T-junctions as sidestream sampling probes.
- Variations in shearing causing variations in droplet size distribution.
- Contamination and microbiological growth.
7.3. Grey-Box Model Performance
8. Conclusions
Author Contributions
Funding
Acknowledgments
Conflicts of Interest
References
- EIA. International Energy Outlook 2019: World Energy Projection System Plus. Available online: www.eia.gov/aeo (accessed on 10 July 2020).
- Nel. An Introduction to Produced Water Management. Available online: http://www.tuvnel.com/site2/download/an_introduction_to_produced_water_management (accessed on 10 July 2020).
- Coca-Prados, J.; Gemma, G.-C. Treatment of Oily Wastewater. In Water Purification and Management; NATO Science for Peace and Security Series C: Environmental Security; Springer: Dordrecht, The Netherlands, 2011; Volume 119, pp. 1–55. [Google Scholar] [CrossRef]
- Schubert, M.F.; Skilbeck, F.; Walker, H.J. Liquid Hydrocyclone Separation Systems. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 275–293. [Google Scholar] [CrossRef]
- Choi, M. Hydrocyclone Produced Water Treatment for Offshore Developments. In Proceedings of the SPE Annual Technical Conference and Exhibition, New Orleans, LA, USA, 23–26 September 1990; Society of Petroleum Engineers: Richardson, TX, USA, 1990; pp. 473–480. [Google Scholar] [CrossRef]
- Husveg, T.; Johansen, O.; Bilstad, T. Operational Control of Hydrocyclones During Variable Produced Water Flow Rates—Frøy Case Study. SPE Prod. Oper. 2007, 22, 294–300. [Google Scholar] [CrossRef]
- OSPAR-Commission. North Sea Manual on Maritime Oil Pollution Offences; OSPAR: London, UK, 2012. [Google Scholar]
- Jepsen, K.L. Modeling and Control of Membrane Filtration Systems for Offshore Produced Water Treatment. Ph.D. Thesis, Aalborg University, Aalborg, Denmark, 2019. [Google Scholar]
- Kharoua, N.; Khezzar, L.; Nemouchi, Z. Hydrocyclones for De-oiling Applications—A Review. Pet. Sci. Technol. 2010, 28, 738–755. [Google Scholar] [CrossRef]
- Sinker, A.; Humphris, M.; Wayth, N. Enhanced Deoiling Hydrocyclone Performance without Resorting to Chemicals. In Proceedings of the Offshore Europe Oil and Gas Exhibition and Conference, Aberdeen, UK, 7–10 September 1999; Society of Petroleum Engineers: Rishardson, TX, USA; pp. 1–9. [Google Scholar] [CrossRef]
- Husveg, T.; Rambeau, O.; Drengstig, T.; Bilstad, T. Performance of a deoiling hydrocyclone during variable flow rates. Miner. Eng. 2007, 20, 368–379. [Google Scholar] [CrossRef]
- Nowakowski, A.; Cullivan, J.; Williams, R.; Dyakowski, T. Application of CFD to modelling of the flow in hydrocyclones. Is this a realizable option or still a research challenge? Miner. Eng. 2004, 17, 661–669. [Google Scholar] [CrossRef]
- Georgie, W. Effective and Holistic Approach to produced Water Management for Offshore Operation. In Proceedings of the Offshore Technology Conference, Houston, TX, USA, 6–9 May 2002; pp. 1–13. [Google Scholar] [CrossRef]
- Rajamani, R.K.; Milin, L. Fluid-flow model of the hydrocyclone for concentrated slurry classification. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 95–108. [Google Scholar]
- Chhabra, R.P. Bubbles, Drops, and Particles in Non-Newtonian Fluids, 2nd ed.; CRC Press: Boca Raton, FL, USA, 2006. [Google Scholar]
- Meldrum, N. Hydrocyclones: A Solutlon to Produced-Water Treatment. SPE Prod. Eng. 1988, 3, 669–676. [Google Scholar] [CrossRef]
- Bram, M.V.; Hansen, L.; Hansen, D.S.; Yang, Z. Grey-Box modeling of an offshore deoiling hydrocyclone system. In Proceedings of the 1st Annual IEEE Conference on Control Technology and Applications, CCTA 2017, Mauna Lani, HI, USA; pp. 94–98. [CrossRef]
- Yang, Z.; Pedersen, S.; Durdevic, P. Cleaning the produced water in offshore oil production by using plant-wide optimal control strategy. Oceans St. John’s 2014. [Google Scholar] [CrossRef]
- Plitt, L.R. A Mathematical Model of The Hydrocyclone Classifier. Miner. Process. 1976, 69, 114–123. [Google Scholar] [CrossRef]
- Colman, D.; Thew, M. Correlation of separation results from light dispersion hydrocyclones. Chem. Eng. Res. Des. 1983, 61, 233–240. [Google Scholar]
- Svarovsky, L.; Svarovsky, J. A New Method of Testing Hydrocyclone Grade Efficiencies. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 135–145. [Google Scholar] [CrossRef]
- Young, G.; Wakley, W.; Taggart, D.; Andrews, S.; Worrell, J. Oil-water separation using hydrocyclones: An experimental search for optimum dimensions. J. Pet. Sci. Eng. 1994, 11, 37–50. [Google Scholar] [CrossRef]
- Colman, D. The Hydrocyclone for Separating Light Dispersions. Ph.D. Thesis, University of Southampton, Southampton, UK, 1981. [Google Scholar]
- Yoshioka, N.; Hotta, Y. Liquid Cyclone as a Hydraulic Classifier. Chem. Eng. 1955, 19, 632–641. [Google Scholar] [CrossRef] [Green Version]
- Nageswararao, K. Reduced efficiency curves of industrial hydrocyclones-An analysis for plant practice. Miner. Eng. 1999, 12, 517–544. [Google Scholar] [CrossRef]
- Ortega-Rivas, E.; Svarovsky, L. Effect of solids feed grade on the separation of slurries in hydrocyclones. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 147–175. [Google Scholar]
- Horsley, R.R.; Tran, Q.K.; Reizes, J.A. The effect of rheology on the performance of hydrocyclones. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 215–227. [Google Scholar]
- Thew, M. Hydrocyclone Redesign for Liquid-Liquid Separation. Chem. Eng. Lond. 1986, 17–23. [Google Scholar]
- Bradley, D. The Hydrocyclone, 1st ed.; Pergamon Press: Oxford, UK, 1965; Volume 4, p. 330. [Google Scholar]
- Murthy, Y.R.; Bhaskar, K.U. Parametric CFD studies on hydrocyclone. Powder Technol. 2012, 230, 36–47. [Google Scholar] [CrossRef]
- Motin, A.; Bénard, A. Design of liquid–liquid separation hydrocyclones using parabolic and hyperbolic swirl chambers for efficiency enhancement. Chem. Eng. Res. Des. 2017, 122, 184–197. [Google Scholar] [CrossRef] [Green Version]
- Kyriakidis, Y.N.; Silva, D.O.; Barrozo, M.A.S.; Vieira, L.G.M. Effect of variables related to the separation performance of a hydrocyclone with unprecedented geometric relationships. Powder Technol. 2018, 338, 645–653. [Google Scholar] [CrossRef]
- Liu, Y.; Yang, Q.; Qian, P.; Wang, H.L. Experimental study of circulation flow in a light dispersion hydrocyclone. Sep. Purif. Technol. 2014, 137, 66–73. [Google Scholar] [CrossRef]
- Tang, B.; Xu, Y.; Song, X.; Sun, Z.; Yu, J. Numerical study on the relationship between high sharpness and configurations of the vortex finder of a hydrocyclone by central composite design. Chem. Eng. J. 2015, 278, 504–516. [Google Scholar] [CrossRef]
- Kelsall, D.F. A Study of the Motion of Solid Particles in a Hydraulic Cyclone. Chem. Eng. Res. Des. 1952, 30, 87–108. [Google Scholar]
- Rietema, K. Performance and design of hydrocyclones—I: General considerations. Chem. Eng. Sci. 1961, 15, 298–302. [Google Scholar] [CrossRef]
- Thew, M.T. Cyclones for Oil/Water Separations. In Encyclopedia of Separation Science; Elsevier: Amsterdam, The Netherlands, 2000; pp. 1480–1490. [Google Scholar] [CrossRef]
- Amini, S.; Mowla, D.; Golkar, M. Developing a new approach for evaluating a de-oiling hydrocyclone efficiency. Desalination 2012, 285, 131–137. [Google Scholar] [CrossRef]
- Rietema, K. The mechanism of the separation of finely dispersed solids in cyclones. In Cyclones in Industry; Rietema, K., Verver, C., Eds.; Elsevier: Amsterdam, The Netherlands, 1961; Chapter 4; pp. 46–63. [Google Scholar]
- Svarovsky, L.; Marasinghe, B. Performance of hydrocyclones at high feed solids concentrations. In 1st International Conference on Hydrocyclones; Priestley, G., Stephens, H., Eds.; Bhra Fluid Engineering: Cambridge, UK, 1980; pp. 127–142. [Google Scholar]
- Bloor, M.; Ingham, D. On the efficiency of the industrial cyclone. Trans. Inst. Chem. Eng 1973, 51, 173–176. [Google Scholar]
- Davidson, M.R. Similarity solutions for flow in hydrocyclones. Chem. Eng. Sci. 1988, 43, 1499–1505. [Google Scholar] [CrossRef]
- Holland-Batt, A. A bulk model for separation in hydrocyclones. Inst. Min. Metall. 1982, 91, C21–C25. [Google Scholar]
- Hsieh, K.T.; Rajamani, R.K. Mathematical model of the hydrocyclone based on physics of fluid flow. AIChE J. 1991, 37, 735–746. [Google Scholar] [CrossRef]
- Rajamani, K.; Hsieh, K. Hydrocyclone model: A fluid mechanic approach. In SME Annual Meeting; Smith, S.G.D., Ed.; Society of Mining Engineers of AIME: Luxembourg, 1988; Number 88. [Google Scholar]
- Ma, L.; Fu, P.; Wu, J.; Wang, F.; Li, J.; Shen, Q.; Wang, H. CFD Simulation Study on Particle Arrangements at the Entrance to a Swirling Flow Field for Improving the Separation Efficiency of Cyclones. Aerosol Air Qual. Res. 2015, 15, 2456–2465. [Google Scholar] [CrossRef]
- Bhaskar, K.U.; Murthy, Y.R.; Raju, M.R.; Tiwari, S.; Srivastava, J.; Ramakrishnan, N. CFD simulation and experimental validation studies on hydrocyclone. Miner. Eng. 2007, 20, 60–71. [Google Scholar] [CrossRef]
- Dlamini, M.F.; Powell, M.S.; Meyer, C.J. A CFD simulation of a single phase hydrocyclone flow field. J. S. Afr. Inst. Min. Metall. 2005, 105, 711–717. [Google Scholar]
- Motin, A. Theoretical and Numerical Study of Swirling Flow Separation Devices for Oil-Water Mixtures. Ph.D. Thesis, Michigan State University, Lansing, MI, USA, 2015. [Google Scholar]
- Bram, M.V.; Hassan, A.A.; Hansen, D.S.; Durdevic, P.; Pedersen, S.; Yang, Z. Experimental modeling of a deoiling hydrocyclone system. In Proceedings of the 20th International Conference on Methods and Models in Automation and Robotics (MMAR), Miedzyzdroje, Poland, 24–27 August 2015; Number 1. pp. 1080–1085. [Google Scholar] [CrossRef]
- Durdevic, P.; Pedersen, S.; Bram, M.V.; Hansen, D.; Hassan, A.; Yang, Z. Control Oriented Modeling of a De-oiling Hydrocyclone. IFAC PapersOnLine 2015, 48, 291–296. [Google Scholar] [CrossRef]
- Amini, S.; Mowla, D.; Golkar, M.; Esmaeilzadeh, F. Mathematical modelling of a hydrocyclone for the down-hole oil-water separation (DOWS). Chem. Eng. Res. Des. 2012, 90, 2186–2195. [Google Scholar] [CrossRef]
- Das, T.; Jäschke, J. Modeling and control of an inline deoiling hydrocyclone. IFAC PapersOnLine 2018, 51, 138–143. [Google Scholar] [CrossRef]
- Das, T.; Heggheim, S.J.; Dudek, M.; Verheyleweghen, A.; Jäschke, J. Optimal Operation of a Subsea Separation System Including a Coalescence Based Gravity Separator Model and a Produced Water Treatment Section. Ind. Eng. Chem. Res. 2019, 58, 4168–4185. [Google Scholar] [CrossRef]
- Bram, M.V.; Hansen, L.; Hansen, D.S.; Yang, Z. Hydrocyclone Separation Efficiency Modeled by Flow Resistances and Droplet Trajectories. IFAC PapersOnLine 2018, 51, 132–137. [Google Scholar] [CrossRef]
- Bram, M.V.; Hansen, L.; Hansen, D.S.; Yang, Z. Extended Grey-Box Modeling of Real-Time Hydrocyclone Separation Efficiency. In Proceedings of the 18th European Control Conference (ECC), Naples, Italy, 25–28 June 2019; pp. 3625–3631. [Google Scholar] [CrossRef]
- Wolbert, D.; Ma, B.F.; Aurelle, Y.; Seureau, J. Efficiency estimation of liquid-liquid Hydrocyclones using trajectory analysis. AIChE J. 1995, 41, 1395–1402. [Google Scholar] [CrossRef]
- Hansen, D.S.; Jespersen, S.; Bram, M.V.; Yang, Z. Uncertainty Analysis of Fluorescence-Based Oil-in-Water Monitors for Oil & Gas Produced Water. Sensors 2020, 20, 4435. [Google Scholar] [CrossRef]
- Dabir, B.; Petty, C.A. Measurements of mean velocity profiles in a hydrocyclone using laser doppler anemometry. Chem. Eng. Commun. 1986, 48, 377–388. [Google Scholar] [CrossRef]
- Derksen, J.J.; Van den Akker, H.E.A. Simulation of vortex core precession in a reverse-flow cyclone. AIChE J. 2000, 46, 1317–1331. [Google Scholar] [CrossRef]
- Spottiswood, D.J.; Kelly, E. Introduction to Mineral Processing; Wiley: New York, NY, USA, 1982; p. 491. [Google Scholar]
- Ma, B.F. Purification of Waste Waters from Petroleum Industry by Hydrocyclone. Development of a New Three-Phase Hydrocyclone. Ph.D. Thesis, INSA Toulouse, Toulouse, France, 1993. [Google Scholar]
- Munson, B.R.; Okiishi, T.H.; Huebsch, W.W.; Rothmayer, A.P. Fundamentals of Fluid Mechanics, 7th ed.; Wiley: Hoboken, NJ, USA, 2012. [Google Scholar]
- De Araújo, C.; Scheid, C.; Loureiro, J.; Klein, T.; Medronho, R. Hydrocylone for oil-water separations with high oil content: Comparison between CFD simulations and experimental data. J. Pet. Sci. Eng. 2020, 187, 106788. [Google Scholar] [CrossRef]
- Motin, A.; Tarabara, V.V.; Petty, C.A.; Bénard, A. Hydrodynamics within flooded hydrocyclones during excursion in the feed rate: Understanding of turndown ratio. Sep. Purif. Technol. 2017, 185, 41–53. [Google Scholar] [CrossRef]
- Hansen, D.S.; Jespersen, S.; Bram, M.V.; Yang, Z. Human Machine Interface Prototyping and Application for Advanced Control of Offshore Topside Separation Processes. In Proceedings of the IECON 2018—44th Annual Conference of the IEEE Industrial Electronics Society, Washington, DC, USA, 21–23 October 2018; pp. 2341–2347. [Google Scholar] [CrossRef]
- Durdevic, P.; Yang, Z. Application of H∞ Robust Control on a Scaled Offshore Oil and Gas De-oiling Facility. Energies 2018, 11, 287. [Google Scholar] [CrossRef] [Green Version]
- Hansen, D.S.; Bram, M.V.; Yang, Z. Efficiency investigation of an offshore deoiling hydrocyclone using real-time fluorescence- and microscopy-based monitors. In Proceedings of the 1st IEEE Conference on Control Technology and Applications (CCTA), Mauna Lani, HI, USA, 27–30 August 2017; pp. 1104–1109. [Google Scholar] [CrossRef]
- Yang, M. Measurement of Oil in Produced Water. In Produced Water; Lee, K., Neff, J., Eds.; Springer: New York, NY, USA, 2011; Number 1; Chapter 2; pp. 57–88. [Google Scholar] [CrossRef]
- Luo, Q.; Xu, J.R. The Effect of the Air Core on the Flow Field within Hydrocyclones. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 51–62. [Google Scholar]
- Walker, K.J.; Veasey, T.; Moore, I. A parametric evaluation of the hydrocyclone separation of drilling mud from drilled rock chippings. In Hydrocyclones; Springer: Berlin/Heidelberg, Germany, 1992; pp. 121–132. [Google Scholar]
- Dabir, B. Mean Velocity Measurement in a 3 Inches Hydrocyclone Using Laser Doppler Anemometry. Ph.D. Thesis, Michigan State University, Lansing, MI, USA, 1983. [Google Scholar]


























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Symbol | Value | Unit | Source | Method |
|---|---|---|---|---|
| Fluid Parameters: | ||||
| 850 | - | Look-up | ||
| 999 | - | Look-up | ||
| [63] | Look-up | |||
| Geometrical Parameters: | ||||
| 10 | - | Manufacturer | ||
| 5 | - | Manufacturer | ||
| 1.5 | - | Manufacturer | ||
| 0.382 | - | Manufacturer | ||
| 0.6 | - | Manufacturer | ||
| Estimated Parameters: | ||||
| 437 | [17] | Regression | ||
| 4219 | [17] | Regression | ||
| 0.264 | [17] | Regression | ||
| 31.346 | - | Regression | ||
| 1.842 | - | Regression | ||
| 0.9856 | - | Regression | ||
| Empirical Parameters: | ||||
| 0.5 | - | [57] with [23] | Laser Doppler anemometry | |
| n | 0.65 | - | [57] with [23] | Laser Doppler anemometry |
| 0.02 | - | [56] with [57] | Mass balance | |
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Bram, M.V.; Jespersen, S.; Hansen, D.S.; Yang, Z. Control-Oriented Modeling and Experimental Validation of a Deoiling Hydrocyclone System. Processes 2020, 8, 1010. https://doi.org/10.3390/pr8091010
Bram MV, Jespersen S, Hansen DS, Yang Z. Control-Oriented Modeling and Experimental Validation of a Deoiling Hydrocyclone System. Processes. 2020; 8(9):1010. https://doi.org/10.3390/pr8091010
Chicago/Turabian StyleBram, Mads V., Stefan Jespersen, Dennis S. Hansen, and Zhenyu Yang. 2020. "Control-Oriented Modeling and Experimental Validation of a Deoiling Hydrocyclone System" Processes 8, no. 9: 1010. https://doi.org/10.3390/pr8091010