Model-Free Extremum Seeking Control of Bioprocesses: A Review with a Worked Example



Abstract
:1. Introduction
1.1. Extremum Seeking: A Real-Time Output Feedback Optimization Technique
- Self-optimizing control (SOC), which tracks specific invariants or set-points of the considered process to achieve an indirect optimization [6].
- Dynamic real-time optimization (DRTO) [1,13,14], which originates from the integration of RTO strategies, achieving process operating condition updates, in a model predictive control (MPC) framework. The recent additions of economic costs and constraints has lead to the introduction of DRTO solutions in the form of nonlinear MPC strategies with economic objectives [14].
1.2. The Origins of ESC
1.3. ESC of Bioprocesses
2. Extremum Seeking Approaches
- Model-based strategies, wherein a model-based controller takes advantage of the knowledge about the model structure and either estimates the unknown parameters from online information, or exploits some robustness properties.
- Model-free strategies, wherein online information is directly exploited to estimate the gradient of the measurable cost function, and to drive the process to the optimum using feedback control. No prior knowledge about the kinetic model is required, and the optimum is simply reached by driving the process wherein the estimated cost function gradient vanishes.
2.1. Model-Based Strategies: Uncertain Trajectory Tracking
2.1.1. Adaptive Output Feedback Control
2.1.2. Sliding-Mode Control
2.1.3. Integration of ES to Model Predictive Control
2.2. Model-Free Extremum Seeking Control
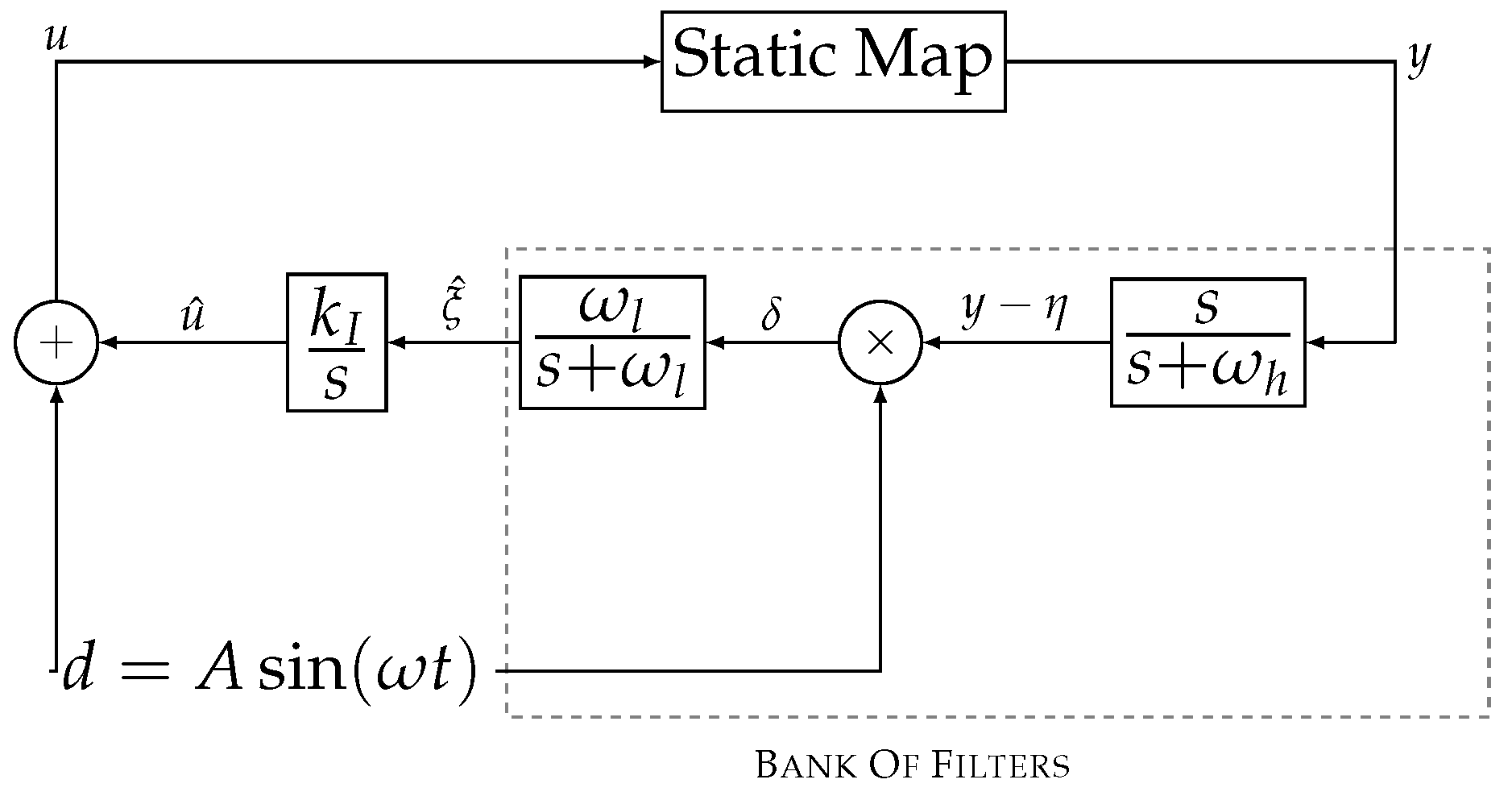
2.2.1. The Classical Pertubation-Based ES and the Use of a Filter Bank
- The process has the fastest dynamics, which, in the limit, can be seen as a static map;
- The dither signal has intermediate dynamics;
- The gradient estimator has the slowest dynamics.
2.2.2. Recursive Parameter Estimators
2.2.3. Empirical ESC: Probing Control
3. Convergence Issues and Acceleration
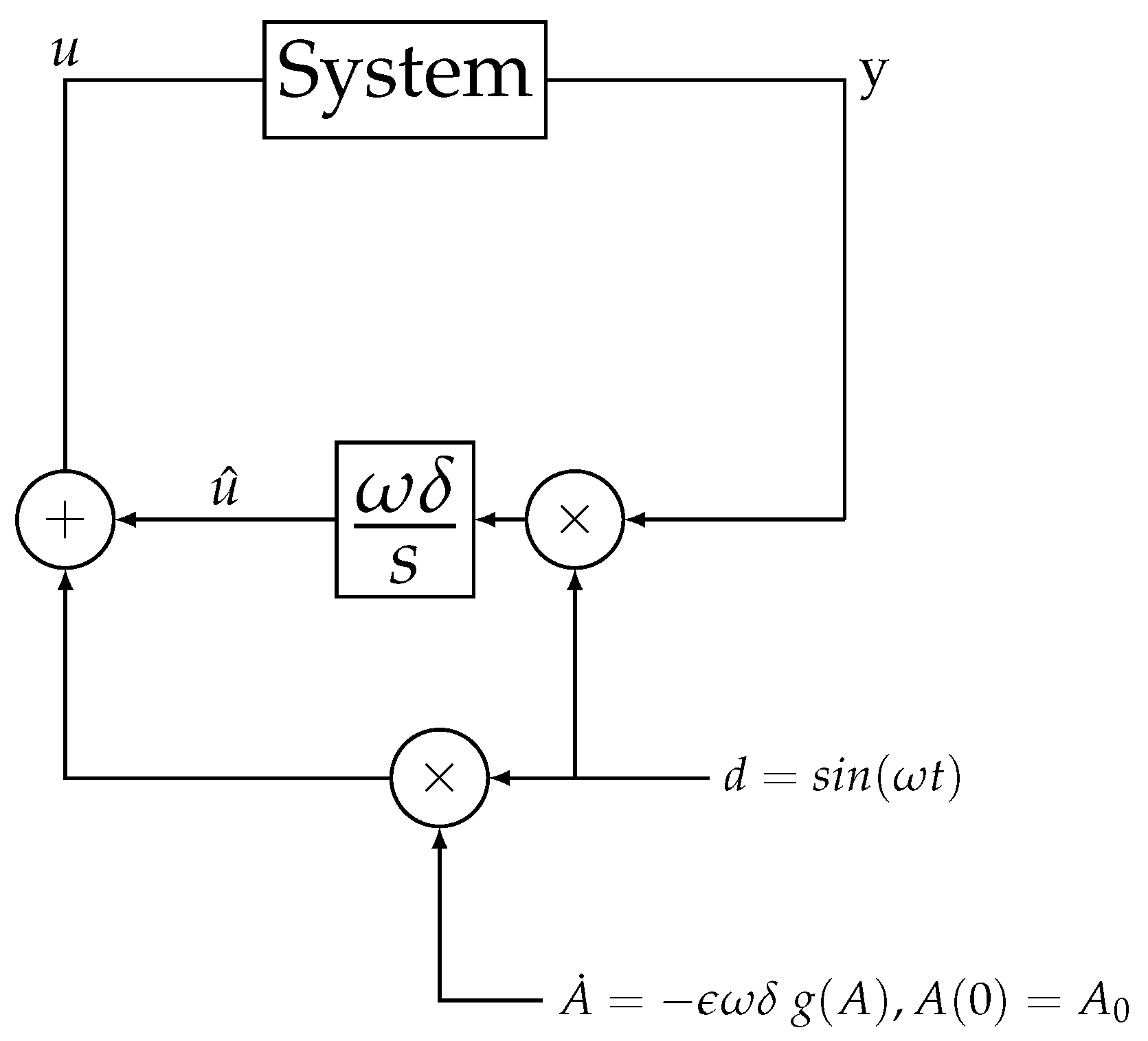
3.1. Extremum Seeking Control: A Simple Output Feedback Form
3.2. Proportional-Integral Extremum Seeking
- The PIESC with BOF converges to a neighborhood of the optimum and should therefore be chosen sufficiently high;
- should be chosen equal to to avoid sudden initial jumps arising from ;
- should be of a greater order of magnitude than to favor the derivative effect.
3.3. Dynamic Modeling with Block-Oriented Representations
- The bioprocess is operated in continuous mode with a constant volume (the inflow is equal to the outflow);
- The measurable performance index is the biomass production , i.e., the product of the dilution rate D imposed by the inflow and outflow pumps by the biomass concentration X;
- The bioprocess can be approximated by a Hammerstein model [94] presenting a quadratic static nonlinearity of the form:where and v represent the static map input and output signals, respectively. This representation assumes that the performance index can be approximated, at least locally, by a quadratic form. For a maximum, it is required that . The Hammerstein model also includes dynamics, which can be described by a transfer function.
- A discrete second-order transfer function may suffice to represent these dynamics:where is the backward shift operator such that and K is a gain which can be chosen so as to ensure unitary steady-state gain, i.e., , which implies . The two poles defined by the parameters and represent the actuator and process dynamics.
3.4. Multivalued Cost Functions and Competing Objectives
- is defined on and on with ;
- For each value of and , there are asymptotically stable equilibria and ;
- for all u;
- ;
- has a unique global maximum in .
4. An Illustrative Example: Optimization of Biomass Productivity
4.1. Bank of Filters with PI Control
4.2. Recursive Least-Square Estimation with PI Control
4.3. Hammerstein Model and Pole-Placement
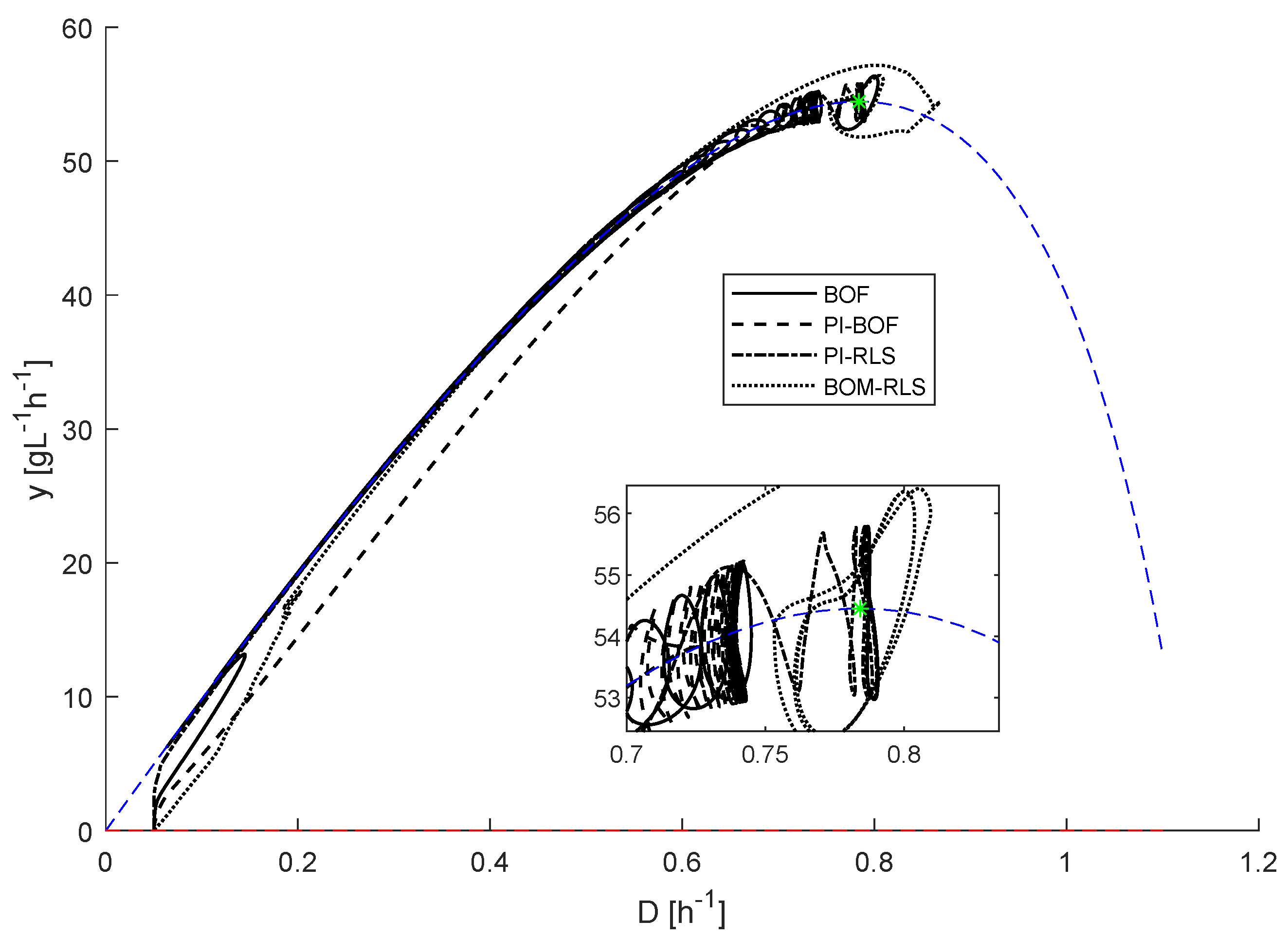
4.4. Numerical Results
- The BOM strategy is by far the most accurate since it allows taking unknown output dynamics into account.
- The PI-BOF strategy allows solving the extremum seeking problem almost instantaneously and therefore provides the fastest convergence, but as a drawback, has a technically inherent and significant offset (see [78]).
- The PI-RLS strategy presents a smaller offset and is overall easy to implement while achieving reasonable convergence times.
- The BOF strategy, even if in the original it was the most intuitive and easiest to implement method, presents several drawbacks, such as long convergence time, tedious parameter tuning, and possible offsets.
5. Real-Life Applications: Microalgae Production Optimization
5.1. Microalgae Growth Rate Optimization
- Quantification of the system dynamics and uncertainties;
- Selection of the dither frequency, and to some extent, its structure;
- Trial and error optimization routine defining the high-pass filter cut-off frequency;
- If the level of noise requires it, determination of the low-pass filter cut-off frequency.
5.2. Microalgae Productivity Optimization
6. Conclusions
Author Contributions
Funding
Conflicts of Interest
References
- Darby, M.L.; Nikolaoub, M.; Jones, J.; Nicholson, D. RTO: An overview and assessment of current practice. J. Process Control 2011, 21, 874–884. [Google Scholar] [CrossRef]
- Chachuat, B.; Srinivasan, B.; Bonvin, D. Adaptation Strategies for Real-time Optimization. Comput. Chem. Eng. 2009, 33, 1557–1567. [Google Scholar] [CrossRef]
- Srinivasan, B.; Bonvin, D. Interplay between Identification and Optimization in Run-to-run Optimization Schemes. In Proceedings of the 2002 American Control Conference (IEEE Cat. No. CH37301), Anchorage, AK, USA, 8–10 May 2002; pp. 2174–2179. [Google Scholar]
- Marchetti, A.; Chachuat, B.; Bonvin, D. Modifier-Adaptation Methodology for Real-Time Optimization. Ind. Eng. Chem. Res. 2009, 48, 6022–6033. [Google Scholar] [CrossRef] [Green Version]
- Gao, W.; Wenzel, S.; Engell, S. A reliable modifier-adaptation strategy for real-time optimization. Comput. Chem. Eng. 2016, 91, 318–328. [Google Scholar] [CrossRef] [Green Version]
- Skogestad, S. Self-optimizing Control: The Missing Link between Steady-state Optimization and Control. Comput. Chem. Eng. 2000, 24, 569–575. [Google Scholar] [CrossRef] [Green Version]
- Ariyur, K.B.; Krstic, M. Real-Time Optimization by Extremum-Seeking Control; Wiley-Interscience, Ed.; John Wiley & Sons, Inc.: Hoboken, NJ, USA, 2003. [Google Scholar]
- Tan, Y.; Moase, W.; Manzie, C.; Nesic, D.; Mareels, I. Extremum Seeking from 1922 to 2010. In Proceedings of the 29th Chinese Control Conference, Beijing, China, 29–31 July 2010; pp. 14–26. [Google Scholar]
- Krstic, M. Extremum Seeking Control. In Encyclopedia of Systems and Control; Baillieul, J., Samad, T., Eds.; Springer: London, UK, 2020. [Google Scholar]
- Srinivasan, B.; Primus, C.J.; Bonvin, D.; Ricker, N.L. Run-to-run optimization via control of generalized constraints. Control Eng. Pract. 2001, 9, 911–919. [Google Scholar] [CrossRef] [Green Version]
- Francois, G.; Srinivasan, B.; Bonvin, D. Use of measurements for enforcing the necessary conditions of optimality in the presence of constraints and uncertainty. J. Process Control 2005, 15, 701–712. [Google Scholar] [CrossRef] [Green Version]
- Engell, S. Feedback control for optimal process operation. J. Process Control 2007, 17, 203–219. [Google Scholar] [CrossRef]
- Adetola, V.; Guay, M. Integration of real-time optimization and model predictive control. J. Process Control 2010, 20, 125–133. [Google Scholar] [CrossRef]
- De Souza, G.; Odloak, D.; Zanin, A.C. Real time optimization (RTO) with model predictive control (MPC). Comput. Chem. Eng. 2010, 34, 1996–2006. [Google Scholar] [CrossRef]
- Scheinker, A.; Krstić, M. Model-Free Stabilization by Extremum Seeking; Springer: Berlin/Heidelberg, Germany, 2017. [Google Scholar]
- Leblanc, M. Sur l’électrification des chemins de fer au moyen de courants alternatifs de fréquence élevée. Revue Générale De L’Électricité 1922, 12, 275–277. [Google Scholar]
- Kazakevich, V.V. Technique of Automatic Control of Different Processes to Maximum or to Minimum. Avtorskoe Svidetelstvo USSR Patent 66335, 25 November 1943. [Google Scholar]
- Draper, C.S.; Li, Y.T. Principales of Optimalizing Control Systems and an Application to the Internal Combustion Engine. In Optimal and Selfoptimizing Control; Oldenburger, R., Ed.; The MIT Press: Boston, MA, USA, 1951. [Google Scholar]
- Morosanov, I.S. Method of extremum control. Autom. Remote Control 1957, 18, 1077–1092. [Google Scholar]
- Meerkov, S.M. Asymptotic methods for investigating a class of forced states in extremal systems. Autom. Remote Control 1967, 12, 1916–1920. [Google Scholar]
- Blackman, P.F. Extremum-Seeking Regulators. In An Exposition of Adaptive Control; Westcott, J.H., Ed.; The Macmillan Company: New York, NY, USA, 1962. [Google Scholar]
- Luxat, J.; Lees, L. Stability of peak-holding control systems. IEEE Trans. Ind. Electron. Control Instrum. 1971, 11–15. [Google Scholar] [CrossRef]
- Korovin, S.; Utkin, V. Using sliding modes in static optimization and nonlinear programming. Automatica 1974, 10, 525–532. [Google Scholar] [CrossRef]
- Wang, H.H.; Krstic, M. Extremum seeking for limit cycle minimization. IEEE Trans. Autom. Control 2000, 45, 2432–2437. [Google Scholar] [CrossRef] [Green Version]
- Aström, K.J.; Wittenmark, B. Adaptive Control, 2nd ed.; Addison-Wesley Publishing Company, Inc.: Boston, MA, USA, 1995. [Google Scholar]
- Leyva, R.; Alonso, C.; Queinnec, I.; Cid-Pastor, A.; Lagrange, D.; Martinez-Salamero, L. MPPT of photovoltaic systems using extremum-seeking control. IEEE Trans. Aerosp. Electron. Syst. 2006, 42, 249–258. [Google Scholar] [CrossRef]
- Ghaffari, A.; Krstić, M.; Seshagiri, S. Power optimization for photovoltaic microconverters using multivariable newton-based extremum seeking. IEEE Trans. Control Syst. Technol. 2014, 22, 2141–2149. [Google Scholar] [CrossRef]
- Chichka, D.F.; Speyer, J.L.; Fanti, C.; Park, C.G. Peak-seeking control for drag reduction in formation flight. J. Guid. Control. Dyn. 2006, 29, 1221–1230. [Google Scholar] [CrossRef] [Green Version]
- Van der Meulen, S.; De Jager, B.; Veldpaus, F.; Van der Noll, E.; Van der Sluis, F.; Steinbuch, M. Improving continuously variable transmission efficiency with extremum seeking control. IEEE Trans. Control Syst. Technol. 2011, 20, 1376–1383. [Google Scholar] [CrossRef]
- Hellström, E.; Lee, D.; Jiang, L.; Stefanopoulou, A.G.; Yilmaz, H. On-board calibration of spark timing by extremum seeking for flex-fuel engines. IEEE Trans. Control Syst. Technol. 2013, 21, 2273–2279. [Google Scholar] [CrossRef]
- Koeln, J.P.; Alleyne, A.G. Optimal subcooling in vapor compression systems via extremum seeking control: Theory and experiments. Int. J. Refrig. 2014, 43, 14–25. [Google Scholar] [CrossRef]
- Burns, D.J.; Weiss, W.K.; Guay, M. Realtime setpoint optimization with time-varying extremum seeking for vapor compression systems. In Proceedings of the 2015 American Control Conference (ACC), Chicago, IL, USA, 1–3 July 2015; pp. 974–979. [Google Scholar]
- Ghaffari, A.; Krstić, M.; Seshagiri, S. Power optimization and control in wind energy conversion systems using extremum seeking. IEEE Trans. Control Syst. Technol. 2014, 22, 1684–1695. [Google Scholar] [CrossRef]
- Shahriari, Z. An Extremum Seeking Control System for Control of RF Cavity Resonators. Ph.D. Thesis, School of Mechatronic Systems Engineering, Simon Fraser University, Surrey, BC, Canada, 2016. [Google Scholar]
- Leewe, R.; Shahriari, Z.; Fong, K.; Moallem, M. Resonance frequency tuning of an RF cavity through sliding mode extremum seeking. Nucl. Instruments Methods Phys. Res. Sect. A Accel. Spectrometers Detect. Assoc. Equip. 2018, 902, 70–75. [Google Scholar] [CrossRef]
- Dinçmen, E.; Altınel, T. An emergency braking controller based on extremum seeking with experimental implementation. Int. J. Dyn. Control 2018, 6, 270–283. [Google Scholar] [CrossRef]
- Wang, H.H.; Krstic, M.; Bastin, G. Optimizing Bioreactors by Extremum-seeking. Int. J. Adapt. Control Signal Process. 1999, 13, 651–669. [Google Scholar] [CrossRef]
- Marcos, N.I.; Guay, M.; Dochain, D. Output Feedback Adaptive Extremum Seeking Control for a Continuous Stirred Tank Bioreactor with Monod’s Kinetics. J. Process Control 2004, 14, 807–818. [Google Scholar] [CrossRef]
- Akesson, M.; Hagander, P.; Axelsson, J.P. A probing feeding strategy for Escherichia coli cultures. Biotechnol. Tech. 1999, 13, 523–528. [Google Scholar] [CrossRef]
- Akesson, M.; Hagander, P.; Axelsson, J.P. Avoiding acetate accumulation in Escherichia Coli Cult. Using Feedback Control Glucose Feed. Biotechnol. Bioeng. 2001, 73, 223–230. [Google Scholar] [CrossRef]
- Teel, A.R.; Popović, D. Solving smooth and nonsmooth multivariable extremum seeking problems by the methods of nonlinear programming. In Proceedings of the 2001 American Control Conference. (Cat. No. 01CH37148), Arlington, VA, USA, 25–27 June 2001; pp. 2394–2399. [Google Scholar]
- Guay, M.; Zhang, T. Adaptive extremum seeking control of nonlinear dynamic systems with parametric uncertainties. Automatica 2003, 39, 1283–1293. [Google Scholar] [CrossRef]
- Zhang, T.; Guay, M.; Dochain, D. Adaptive Extremum Seeking Control of Continuous Stirred-Tank Bioreactors. AIChE J. 2004, 49, 113–123. [Google Scholar] [CrossRef]
- Krstic, M.; Kanellakopoulos, I.; Kokotovic, P. Nonlinear and Adaptive Control Design; Wiley and Sons: New York, NY, USA, 1995. [Google Scholar]
- Ioannou, P.; Sun, J. Robust Adaptive Control; Prentice-Hall: Eaglewood Cliffs, NJ, USA, 1996. [Google Scholar]
- Khalil, H. Nonlinear Systems; Prentice-Hall: Upper Saddle River, NJ, USA, 2002. [Google Scholar]
- Dochain, D.; Perrier, M.; Guay, M. Extremum seeking control and its application to process and reaction systems: A survey. Math. Comput. Simul. 2011, 82, 369–380. [Google Scholar] [CrossRef]
- Titica, M.; Dochain, D.; Guay, M. Adaptive Extremum-seeking Control of Fed-batch Bioreactors. Eur. J. Control 2003, 9, 618–631. [Google Scholar] [CrossRef]
- Titica, M.; Dochain, D.; Guay, M. Real-time Optimization of Fed-batch Bioreactors via Adaptive Extremum-seeking Control. Chem. Eng. Res. Des. 2003, 81, 1289–1295. [Google Scholar] [CrossRef]
- Marcos, N.; Guay, M.; Dochain, D.; Zhang, T. Adaptive extremum-seeking control of a continuous stirred tank bioreactor with Haldane’s Kinetics. J. Process Control 2004, 14, 317–328. [Google Scholar] [CrossRef]
- Cougnon, P.; Dochain, D.; Guay, M.; Perrier, M. On-line optimization of fedbatch bioreactors by adaptive extremum seeking control. J. Process Control 2011, 21, 1526–1532. [Google Scholar] [CrossRef]
- Dewasme, L.; Vande Wouwer, A. Adaptive Extremum-seeking Control Applied to Productivity Optimization in Yeast Fed-batch cultures. IFAC World Congr. 2008, 41, 9713–9718. [Google Scholar] [CrossRef] [Green Version]
- Sonnleitner, B.; Käppeli, O. Growth of Saccharomyces Cerevisiae Is Control. Its Ltd. Respir. Capacit: Formulation Verif. A Hypothesis. Biotechnol. Bioeng. 1986, 28, 927–937. [Google Scholar] [CrossRef]
- Guay, M.; Dochain, D.; Perrier, M. Adaptive extremum seekingcontrol of continuous stirred tank bioreactors with unknown growth kinetics. Automatica 2004, 40, 881–888. [Google Scholar] [CrossRef]
- Lara-Cisneros, G.; Femat, R.; Dochain, D. An extremum seeking approach via variable-structure control for fed-batch bioreactors with uncertain growth rate. J. Process Control 2014, 24, 663–671. [Google Scholar] [CrossRef]
- Lara-Cisneros, G.; Aguilar-López, R.; Femat, R. On the dynamic optimization of methane production in anaerobicdigestion via extremum-seeking control approach. Comput. Chem. Eng. 2015, 75, 49–59. [Google Scholar] [CrossRef]
- Vargas, A.; Moreno, J.; Vande Wouwer, A. Super-twisting estimation of a virtual output for extremum-seeking output feedback control of bioreactors. J. Process Control 2015, 35, 41–49. [Google Scholar] [CrossRef]
- Lara-Cisneros, G.; Femat, R.; Dochain, D. Robust sliding mode-based extremum-seeking controller for reaction systems via uncertainty estimation approach. Int. J. Robust Nonlinear Control 2017, 27, 3218–3235. [Google Scholar] [CrossRef]
- Lara-Cisneros, G.; Dochain, D.; Alvarez-Ramírez, J. Model based extremum-seeking controller via modelling- errorcompensation approach. J. Process Control 2019, 80, 193–201. [Google Scholar] [CrossRef]
- Guay, M.; Peters, N. Real-time dynamic optimization of nonlinear systems: A flatness-based approach. Comput. Chem. Eng. 2006, 30, 709–721. [Google Scholar] [CrossRef]
- Peters, N.; Guay, M.; DeHaan, D. Real-time dynamic optimization of batch systems. J. Process Control 2007, 17, 261–271. [Google Scholar] [CrossRef]
- Guay, M.; Adetola, V. Adaptive economic optimising model predictive control of uncertain nonlinear systems. Int. J. Control 2013, 86, 1425–1437. [Google Scholar] [CrossRef]
- Landau, I.D.; Dugard, L. Commande Adaptative. Aspects Pratiques et Théoriques; Masson: Paris, France, 1986. [Google Scholar]
- Krstic, M.; Wang, H.H. Stability of Extremum Seeking Feedback for General Nonlinear Dynamic Systems. Automatica 2000, 36, 595–601. [Google Scholar] [CrossRef]
- Nguang, S.K.; Chen, X.D. Extremum seeking schemes for continuous fermentation processes described by an unstructured fermentation model. Bioprocess Eng. 2000, 23, 417–420. [Google Scholar] [CrossRef]
- Simeonov, I.; Noykova, N.; Stoyanov, S. Modelling and extremum seeking control of the anaerobic digestion. IFAC Proc. Vol. 2004, 37, 289–294. [Google Scholar] [CrossRef]
- Chioua, M.; Srinivasan, B.; Guay, M.; Perrier, M. Dependence of the error in the optimal solution of perturbation-based extremum seeking methods on the excitation frequency. Can. J. Chem. Eng. 2007, 85, 447–453. [Google Scholar] [CrossRef]
- Tan, Y.; Nesic, D.; Mareels, I. On the Choice of Dither in Extremum Seeking Systems: A Case Study. Automatica 2008, 44, 1446–1450. [Google Scholar] [CrossRef]
- Krstic, M. Performance Improvement and Limitations in Extremum Seeking Control. Syst. Contr. Lett. 2000, 39, 313–326. [Google Scholar] [CrossRef]
- Chioua, M.; Srinivasan, B.; Perrier, M.; Guay, M. Improving convergence of perturbation-based extremum seeking methods for a class of differentially flat systems. IFAC Proc. Vol. 2007, 40, 270–275. [Google Scholar] [CrossRef]
- Simeonov, I.; Stoyanov, S. Modelling and Extremum Seeking Control of a Cascade of Two Anaerobic Bioreactors. Int. J. Bioautom. 2011, 15, 13–24. [Google Scholar]
- Barbu, M.; Ceanga, E.; Vilanova, R.; Caraman, S.; Ifrim, G. Extremum-seeking contro approach based on the influent variability for anaerobic digestion optimization. IFAC Pap. 2017, 50, 12623–12628. [Google Scholar] [CrossRef]
- Pessoa, R.; Mendes, F.; Oliveira, T.R.; Oliveria-Esquerre, K.; Krstic, M. Numerical optimization based on generalized extremum seeking for fast methane production by a modified ADM1. J. Process Control 2019, 84, 56–69. [Google Scholar] [CrossRef]
- Dewasme, L.; Srinivasan, B.; Perrier, M.; Vande Wouwer, A. Extremum-seeking algorithm design for fed-batch cultures of microorganisms with overflow metabolism. J. Process Control 2011, 21, 1092–1104. [Google Scholar] [CrossRef]
- Deschênes, J.S.; St-Onge, P.N.; Collin, J.C.; Tremblay, R. Extremum Seeking Control of Batch Cultures of Microalgae Nannochloropsis Oculata in Pre-Industrial Scale Photobioreactors. IFAC Proc. Vol. 2012, 45, 585–590. [Google Scholar] [CrossRef]
- Sastry, S.; Bodson, M. Adaptive Control: Stability, Convergence and Robustness; Prentice Hall Information and System Sciences Series; Prentice Hall: Englewood Cliffs, NJ, USA, 1989. [Google Scholar]
- Chioua, M.; Srinivasan, B.; Guay, M.; Perrier, M. Performance Improvement of Extremum Seeking Control using Recursive Least Square Estimation with Forgetting Factor. IFAC Pap. 2016, 49, 424–429. [Google Scholar] [CrossRef]
- Guay, M.; Dochain, D. A time-varying extremum-seeking control approach. Automatica 2015, 51, 356–363. [Google Scholar] [CrossRef]
- de Maré, L.; Andersson, M.; Hagander, P. Probing control of glucose feeding in Vibrio cholerae cultivations. Bioprocess Biosyst. Eng. 2003, 25, 221–228. [Google Scholar] [CrossRef] [PubMed]
- Johnsson, O.; Andersson, J.; Johnsson, C. Probing control in B. licheniformis fermentations. IFAC Proc. Vol. 2011, 44, 7132–7137. [Google Scholar] [CrossRef] [Green Version]
- Henes, B.; Sonnleitner, B. Controlled fed-batch by tracking the maximal culture capacity. J. Biotechnol. 2007, 132, 118–126. [Google Scholar] [CrossRef]
- Velut, S.; Castan, A.; Short, K.; Axelsson, J.; Hagander, P.; Zditosky, B.; Rysenga, C.; de Maré, L.; Haglund, J. Influence of bioreactor scale and complex medium on probing control of glucose feeding in cultivations of recombinant strains of Escherichia coli. Biotechnol. Bioeng. 2007, 97, 816–824. [Google Scholar] [CrossRef] [PubMed]
- Feudjio Letchindjio, C.G.; Dewasme, L.; Deschênes, J.S.; Vande Wouwer, A. An Extremum Seeking Strategy Based on Block-Oriented Models: Application to Biomass Productivity Maximization in Microalgae Cultures. Ind. Eng. Chem. Res. 2019, 58, 13481–13494. [Google Scholar] [CrossRef]
- Guay, M.; Dochain, D. A proportional integral extremum-seeking control approach. IFAC Proc. Vol. 2014, 47, 377–382. [Google Scholar] [CrossRef] [Green Version]
- Guay, M.; Dochain, D. A proportional-integral extremum-seeking controller design technique. Automatica 2017, 77, 61–67. [Google Scholar] [CrossRef]
- Guay, M. A Perturbation-Based Proportional Integral Extremum-Seeking Control Approach. IEEE Trans. Autom. Control 2016, 61, 3370–3381. [Google Scholar] [CrossRef]
- Burns, D.J.; Laughman, C.R.; Guay, M. Proportional-Integral Extremum Seeking for Vapor Compression Systems. IEEE Trans. Control Syst. Technol. 2020, 28, 403–412. [Google Scholar] [CrossRef]
- Tan, Y.; Nesic, D.; Mareels, I. On Non-local Stability Properties of Extremum Seeking Control. Automatica 2006, 42, 889–903. [Google Scholar] [CrossRef] [Green Version]
- Moase, W.; Manzie, C. Fast extremum-seeking for Wiener-Hammerstein plants. Automatica 2012, 48, 2433–2443. [Google Scholar] [CrossRef]
- Moase, W.; Manzie, C. Semi-Global Stability Analysis of Observer-Based Extremum-Seeking for Hammerstein Plants. IEEE Trans. Autom. Control 2012, 57, 1685–1695. [Google Scholar] [CrossRef]
- Sharafi, J.; Moase, W.H.; Manzie, C. Fast extremum seeking on Hammerstein plants: A model-based approach. Automatica 2015, 59, 171–181. [Google Scholar] [CrossRef]
- Atta, K.T.; Guay, M. Adaptive amplitude fast proportional integral phasor extremum seeking control for a class of nonlinear systems. J. Process Control 2019, 83, 147–154. [Google Scholar] [CrossRef]
- Tan, Y.; Nesic, D.; Mareels, I.; Astolfi, A. On Global Extremum Seeking in the Presence of Local Extrema. Automatica 2009, 45, 245–251, Brief Paper. [Google Scholar] [CrossRef]
- Giri, F.; Bai, E.W. Block-Oriented Nonlinear System Identification; Springer: Berlin/Heidelberg, Germany, 2010; Volume 1. [Google Scholar]
- Ljung, L.; Söderström, T. Theory and Practice of Recursive Identification; MIT Press: Cambridge, MA, USA, 1983. [Google Scholar]
- Kortmann, M.; Unbehauen, H. Identification methods for nonlinear MISO systems. IFAC Proc. Vol. 1987, 20, 233–238. [Google Scholar] [CrossRef]
- Landau, I.D.; Lozano, R.; M’Saad, M.; Karimi, A. Adaptive Control: Algorithms, Analysis and Applications; Springer Science & Business Media: Berlin/Heidelberg, Germany, 2011. [Google Scholar]
- Bastin, G.; Nesic, D.; Tan, Y.; Mareels, I. On extremum seeking in bioprocesses with multivalued cost functions. Biotechnol. Prog. 2009, 25, 683–689. [Google Scholar] [CrossRef]
- Trollberg, O.; Jacobsen, E. Greedy Extremum Seeking Control with Applications to Biochemical Processes. IFAC-PaperOnLine 2016, 49, 109–114. [Google Scholar] [CrossRef]
- Atta, K.; Johansson, A.; Gustafsson, T. Extremum seeking control based on phasor estimation. Syst. Control Lett. 2015, 85, 37–45. [Google Scholar] [CrossRef]
- Cormen, T. Introduction to Algorithms; MIT Press: Cambridge, MA, USA, 2009. [Google Scholar]
- Feudjio Letchindjio, C.G.; Dewasme, L.; Vande Wouwer, A. Extremum-Seeking for micro-algae biomass productivity maximization: An experimental validation. IFAC-PapersOnLine 2019, 52, 281–286. [Google Scholar] [CrossRef]


















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| 0.5 | ||
| 1.4 | ||
| 5 | ||
| 25 | ||
| 3 | ||
| 50 |
| A | 0.02 | 0.02 | |
| 0.08 | 2 | ||
| 0 | 0.3 | ||
| 0.05 | 1 |
| A | 0.02 | |
| K | 0.1 | |
| 0.99 | − | |
| 0.3 | − | |
| − |
| 0.02 | ||
| 0.01 | ||
| 0.1 | ||
| K | 0.5 | |
| 0.99 | ||
© 2020 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Dewasme, L.; Vande Wouwer, A. Model-Free Extremum Seeking Control of Bioprocesses: A Review with a Worked Example. Processes 2020, 8, 1209. https://doi.org/10.3390/pr8101209
Dewasme L, Vande Wouwer A. Model-Free Extremum Seeking Control of Bioprocesses: A Review with a Worked Example. Processes. 2020; 8(10):1209. https://doi.org/10.3390/pr8101209
Chicago/Turabian StyleDewasme, Laurent, and Alain Vande Wouwer. 2020. "Model-Free Extremum Seeking Control of Bioprocesses: A Review with a Worked Example" Processes 8, no. 10: 1209. https://doi.org/10.3390/pr8101209