3.1. Relaxations of Functions
To proceed, we must first strengthen Assumption 1.
Assumption 2. Suppose that Assumption 1 holds and that the convex relaxations are Lipschitz continuous on their respective domains.
Definition 5. Suppose that Assumption 2 holds, and consider some . For each interval , choose a point and a subset . Define a subgradient-cutting mapping:where, in each case, is a finite subgradient of at . Observe that any subgradient-cutting mapping is convex, since it is a pointwise maximum of affine functions. Moreover, it is an underestimator of both and f on W, since it is the pointwise maximum of underestimators. Thus, is a scheme of convex relaxations of f on Q. If is finite, then is additionally piecewise affine. The following corollary of Theorem 1 provides a new convergence result for polyhedral outer approximations, by showing that subgradient-cutting mappings inherit a second-order pointwise convergence.
Theorem 2. Suppose that Assumption 2 holds, choose some , and consider a scheme of subgradient-cutting convex relaxations as in Definition 5. The scheme has a second-order pointwise convergence.
Proof. For each
, observe that
dominates the affine mapping
on
W, which is a valid choice of
in Theorem 1. Since
in each case, it follows that, for each
and each
,
The claim then follows from Theorem 1. ☐
3.2. Relaxations of Constrained Optimization Problems
Established definitions and analyses concerning second-order pointwise convergence [
26,
27,
35,
36,
38] have focused on applications in global optimization problems with only bound constraints. To extend this analysis, this section considers the second-order pointwise convergence of optimization problems with nontrivial inequality constraints and applies Theorem 2 to handle piecewise-affine relaxations. Equality constraints may be regarded similarly, though with some care. As Example 1 below will illustrate, nontrivial constraints introduce obstacles to analysis that are not present in the box-constrained case, and must be circumvented by enforcing additional assumptions.
This section considers optimization problems that are represented as constrained nonlinear programming problems (NLPs) as follows.
Assumption 3. Suppose that Assumption 1 holds, and that it also holds with each component of a function in place of f and with a scheme in place of . For each set , suppose that and each are Lipschitz continuous on W. Let F denote the collection of all sets for which there exists that satisfies , and assume that F is nonempty.
Supposing that Assumption 3 holds, consider the following NLP for each
. (Here “subject to” is abbreviated as “s.t.”.)
For each
, Weierstrass’s Theorem implies the NLP (
2) has at least one solution and has a finite optimal objective function value
. Replacing the objective function and constraints in (
2) by the convex underestimators provided in Assumption 3, we obtain the following auxiliary NLP.
Again, Weierstrass’s Theorem implies the convex NLP (
3) has at least one solution and has a finite optimal objective function value
. Since the objective function and constraints of Equation (
2) were replaced in (
3) by underestimators, (
3) is a relaxation of (
2) in that
for each
. Such relaxations are commonly employed in deterministic methods for constrained global optimization [
44]. Equality constraints in (
2) may be relaxed analogously by replacing them with inequalities involving a convex underestimator and a concave overestimator; this was not presented here for simplicity.
We will explore conditions under which second-order pointwise convergence of the schemes of underestimators for
f and
in Assumption 3 translate to second-order pointwise convergence of (
3) to (
2), in the following sense.
Definition 6. Suppose that Assumption 3 holds, and consider the optimal-value mappings v and as defined above. Over all , the relaxed NLP (3) exhibits second-order pointwise convergence to the original NLP (2) if there exists for which Since branch-and-bound methods require only bounding and feasibility information to proceed, constrained second-order pointwise convergence in this sense plays the same role in eliminating clustering [
27] as second-order pointwise convergence for bound-constrained global optimization. Nontrivial constraints may also be leveraged in range-reduction techniques, though we will not consider these further.
In light of Theorem 2, the convex underestimators
and
in Assumption 3 may be chosen to be subgradient-cutting mappings. In this case, the relaxed NLP (
3) may be rearranged to exploit its structure for efficiency. Suppose that points
and subsets
are chosen as in Definition 5 and that analogous points
and subsets
are chosen for each
. Suppose that each set
and
is finite. Let
denote a subgradient of
at
, and let
denote a subgradient of
at
. (Since
and
are Lipschitz continuous, such subgradients exist.) Then, for each
, if subgradient-cutting mappings are employed as the estimating schemes in Assumption 3, the relaxed NLP (
3) has the same optimal objective function value as the following linear program (LP):
Such an LP can generally be solved more efficiently than a typical NLP of a similar size; these relaxations will be applied to several numerical examples in
Section 5 below.
We might hope that the relaxed NLP (
3) exhibits second-order pointwise convergence to (
2) with no additional requirements beyond Assumption 3. However, the following counterexample shows that this is not always the case.
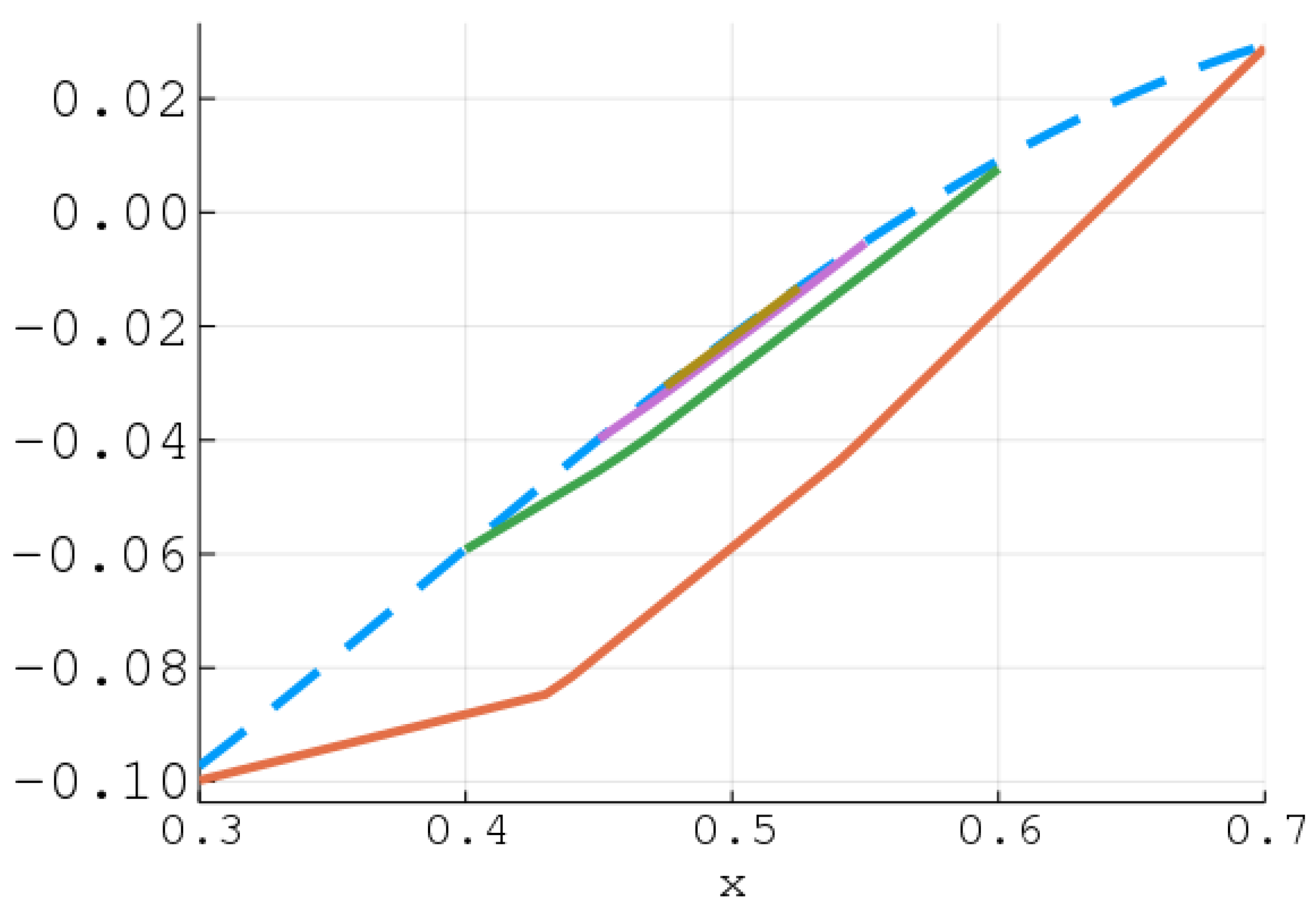
Example 1. Consider sets and , a function for which , and a function for which . Consider the following schemes of convex estimators for f and g over all intervals : Observe that f and g are convex and smooth, as are their convex underestimators, and that Assumption 3 is satisfied. For each , define .
With these choices of functions and sets, it is readily verified that each and the NLP (2) is trivially solved on for each to yield an optimal objective function value ofwith a minimum of in each case. Next, for each , observe thatand so the constraint is satisfied for each . Hence, the relaxed NLP (3) is trivially solved to yield:with a minimum of in each case. So, for each , we havein which caseand so the relaxed NLP (3) does not exhibit second-order pointwise convergence to (2). The above example shows that nontrivial constraints may determine whether second-order pointwise convergence holds, even when schemes of convex underestimators for the objective and constraints are available with second-order pointwise convergence and even when the original NLP (
2) is convex. This is essentially because, as in the above example, it is possible for a small perturbation of a nontrivial inequality constraint to change the corresponding feasible set significantly. In such cases, it is possible for the optimal objective function value of (
3) to approach the optimal objective function value of (
2) slowly as
W shrinks, if at all. A nonconvexity of the components of
may present additional obstacles but is not the primary hindrance here.
A sufficient condition for the second-order pointwise convergence of (
3) may, nevertheless, be obtained by strengthening Assumption 3 as follows. The extra requirements of this assumption are adopted from Shapiro [
47], who used similar requirements to rule out pathological behavior in a perturbation analysis for NLPs. These requirements are essentially second-order sufficient conditions to ensure that the feasible set of (
2) is somewhat stable under perturbations. Recall that no such additional assumptions were needed in the bound-constrained case explored in Theorem 2.
Assumption 4. Suppose that Assumption 3 holds and that the functions f and are twice-continuously differentiable on Z. For each , express the bound constraints in the NLPs (2) and (3) as explicit inequality constraints, and append these to . For each , let denote the optimal solution set for the NLP (2), and suppose that all of the following conditions are satisfied for each . - 1.
The NLP (2) satisfies the linear-independence constraint qualification (LICQ). That is, with denoting the subset of for which , the gradients for are linearly independent. Hence, as shown by Rockafellar [46], there exist unique multipliers (depending on W but not ) for each for which - 2.
for each .
- 3.
Any vector that satisfies both of the following conditions
for each , and
is also an element of the linear space tangent to at .
Theorem 3. If Assumption 4 holds, then the relaxed NLP (3) exhibits second-order pointwise convergence to (2) over all , as does the LP (4) based on subgradient-cutting mappings. Proof. Under Assumption 4, Theorem 2 shows that the LP (
4) is, in each case, equivalent to an instance of (
3) (adopting different schemes of underestimators that nevertheless still satisfy Assumption 4). Hence, it suffices to show only that the relaxed NLP (
3) exhibits second-order pointwise convergence to (
2).
By Assumption 4, there exists
for which, for each
,
For each
, consider the following variants of the NLP (
2):
and
and let
and
denote the respective optimal objective function values for (
5) and (
6). Analogously to the construction of
, let
,
, and
denote the respective optimal solution sets for (
3), (
5), and (
6); these and
are all nonempty compact sets. Choose the respective optimal solutions
,
,
, and
, so that the distance
is minimized. (Such a choice is always possible due to Weierstrass’s Theorem and Lemma 1 in
Section 5 of Filippov [
48].) By comparing the feasible sets and objective functions of the constructed NLPs, observe that
for each
. Hence, it suffices to establish the existence of
for which, for each
,
Now, by construction of
and noting that (
5) and (
6) share the same feasible set, observe that
. Thus, for each
,
Next, under Assumption 4, observe that (
2) satisfies the hypotheses of Corollary 3.2 by Shapiro [
47]. Hence,
M is “upper Lipschitzian” in the sense of [
47]; since
Q is compact, this implies the existence of
(independent of
W) for which
With
denoting a Lipschitz constant for
f on
Q, it follows that, for each
,
Adding Equations (
7) and (
8) yields
for each
, as required. ☐
To our knowledge, this is the first result establishing sufficient conditions for second-order pointwise convergence for relaxations of NLPs with nontrivial constraints. While Assumption 4 is somewhat stringent, it crucially does not require each optimal solution set to be a singleton, as is typically assumed in quantitative sensitivity analyses for NLPs. Observe that the NLP considered in Example 1 does not satisfy the LICQ and, thus, does not satisfy Assumption 4.
The proof of Theorem 3 does not make use of the convexity of the relaxations and at all, beyond establishing the independence of the multipliers to in Assumption 4. It may be possible—though nontrivial—to exploit this convexity to weaken the hypotheses of Theorem 3.
While any equality constraint
may be represented as the pair
of inequality constraints, this transformation yields an NLP that can never satisfy the LICQ and, thus, cannot satisfy Assumption 4. One way to extend Theorem 3 to NLPs with equality constraints without violating the LICQ is to relax each equality constraint
by replacing it with two weaker inequality constraints:
for small
. Affine equality constraints may alternatively be eliminated by changing variables appropriately.
3.3. Constructing Subgradient-Cutting Mappings
Constructing subgradient-cutting mappings for functions or outer-approximating LPs (
4) for NLPs in practice involves making several decisions; this section presents some suggestions for handling these decisions.
The simplest way to generate suitable points is to choose to be the midpoint of the interval W. This choice is valid regardless of and is straightforward to compute.
The sets
on which subgradients are evaluated may, in principle, be chosen in any manner; we suggest using points for which data is already available if possible or leveraging any prior knowledge concerning which points might be useful. In the absence of any such prior knowledge, Latin hypercube sampling (as described by Audet and Hare [
49]) is a straightforward method for generating pseudo-random points that, in a sense, sample all of
W. Intuitively, including more elements in
results in a larger LP (
4) and demands more subgradient evaluations to set up but also yields a tighter relaxation (
4) of (
2). We consider the effect of the number of linearization points in
on several test problems in
Section 5 below.
As described earlier, several established relaxation schemes may be used to construct schemes of underestimators
and
with second-order pointwise convergence. Subgradients may then be computed using standard automatic differentiation tools [
50] when all functions involved are continuously differentiable; in this case, subgradients coincide with gradients. Otherwise, if nonsmooth relaxations are employed, then dedicated nonsmooth variants of automatic differentiation [
30,
51] may be applied to compute subgradients efficiently.





{kind=link}
{kind=link}