Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator



Abstract
:1. Introduction
- The piston position equation of the MMP system is established using the derivative of the dynamic system. This equation is transformed in the form of the nonlinear system or the nonlinear discrete-time system in state space. The main task of this step is to simplify the piston position control process of the MMP model. Additionally, the new control equations of the valves are successfully applied to the position control using the PID controller.
- To achieve asymptotic stability of the state observer, the UIO utilizing the optimization algorithm (LMI) for the linear and nonlinear discrete-time system is proposed. Our approach is described and validated by Lyapunov’s stability based on the error conditions. Finally, the matrix inequality is obtained to apply the LMI optimization algorithm.
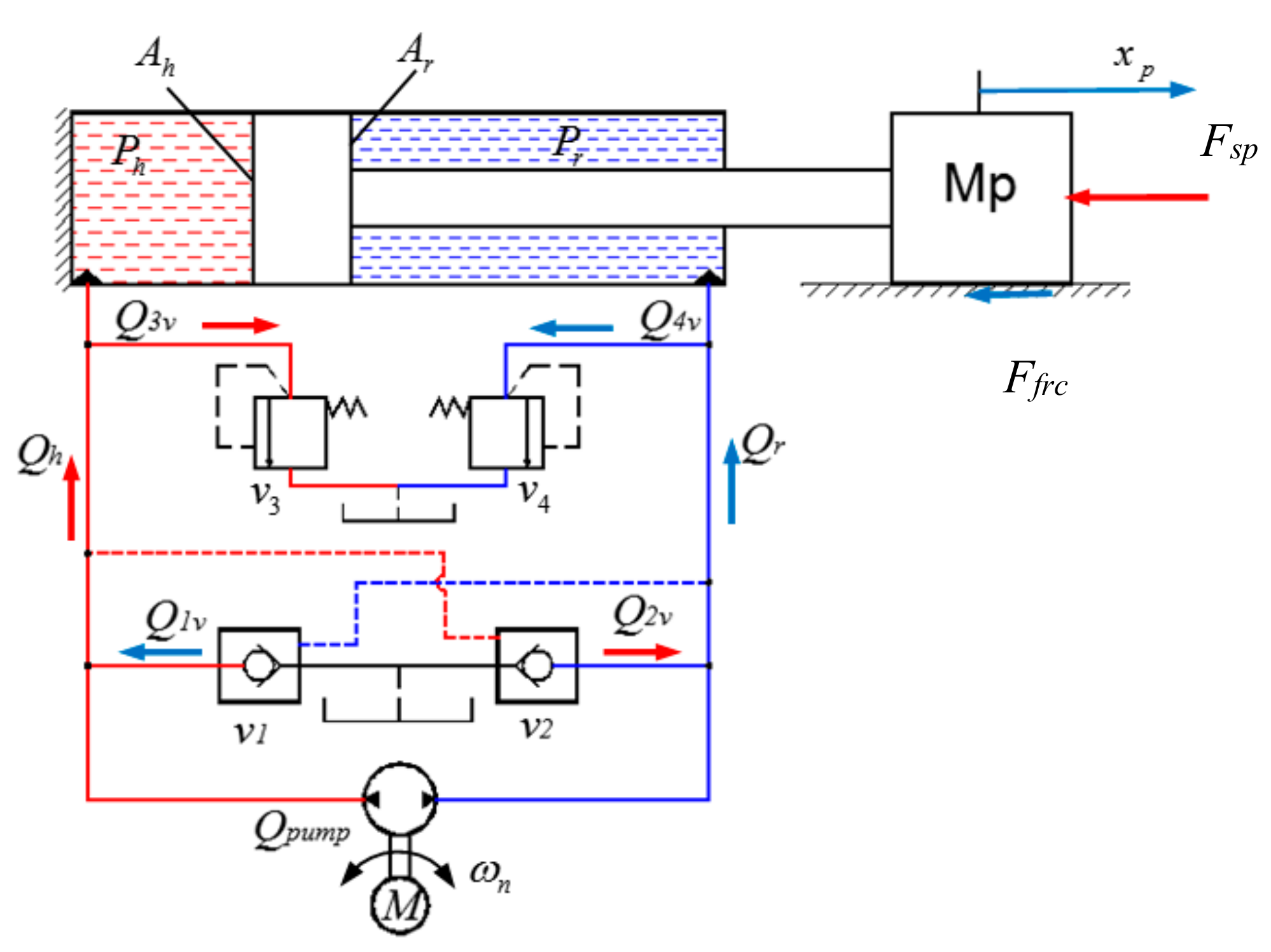
2. EHA Model
3. UIO-Based Reconstruction Approach
3.1. UIO for Linear Discrete-time System
- Performance of the control system using the linear UIO can be inaccurate because of any unknown nonlinear terms.
3.2. UIO for Nonlinear Discrete-time System
- Step 1: Construct the augmented system (39) for the discrete-time system (37).
- Step 2: Determine the matrices , , and to solve the LMI defined by the matrix inequality (45, 46).
- Step 3: Calculate the gain matrices , and using (46).
- Step 4: Obtain the state and fault estimation as , and , respectively,
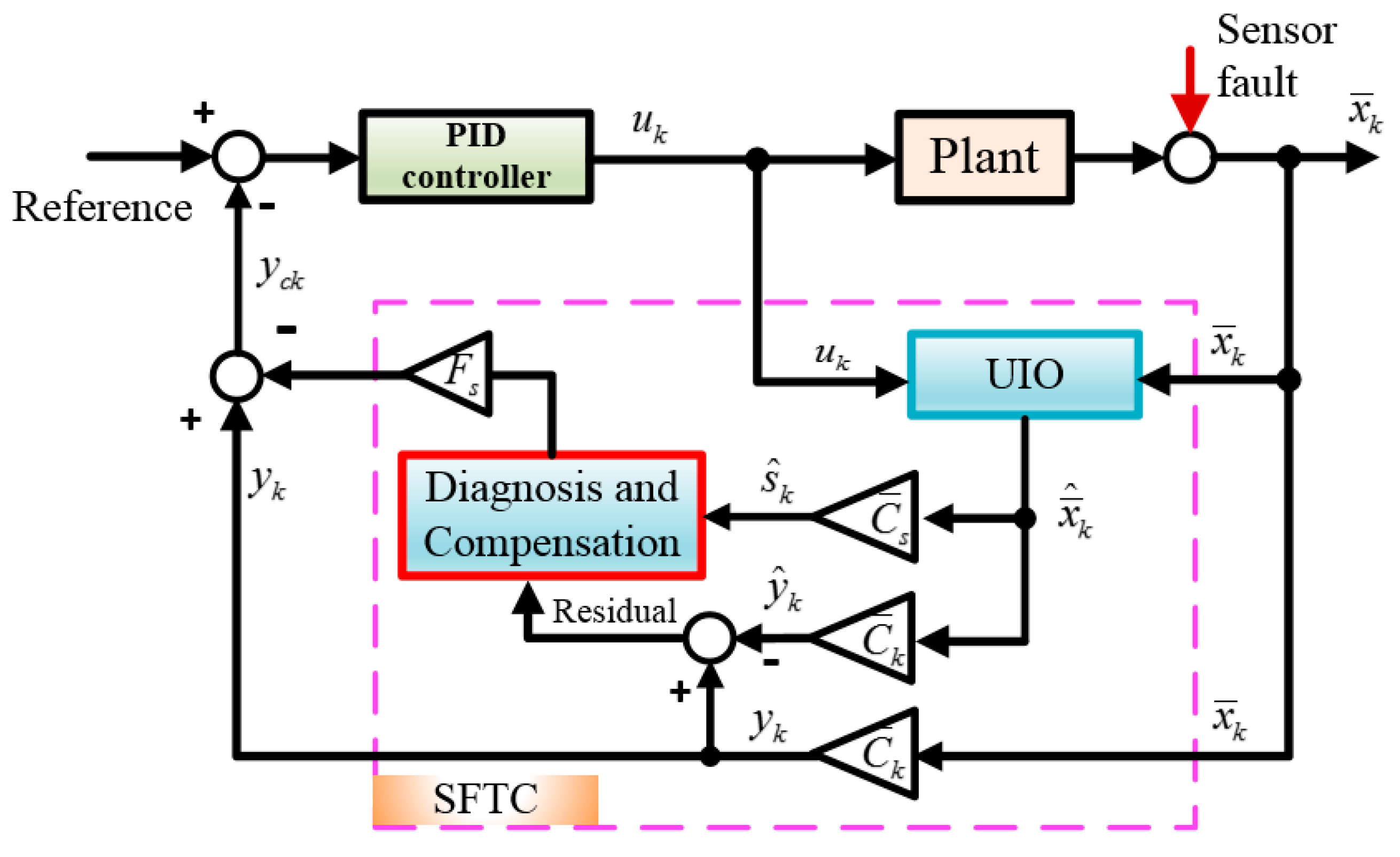
4. Sensor Fault-Tolerant Control in an MMP System
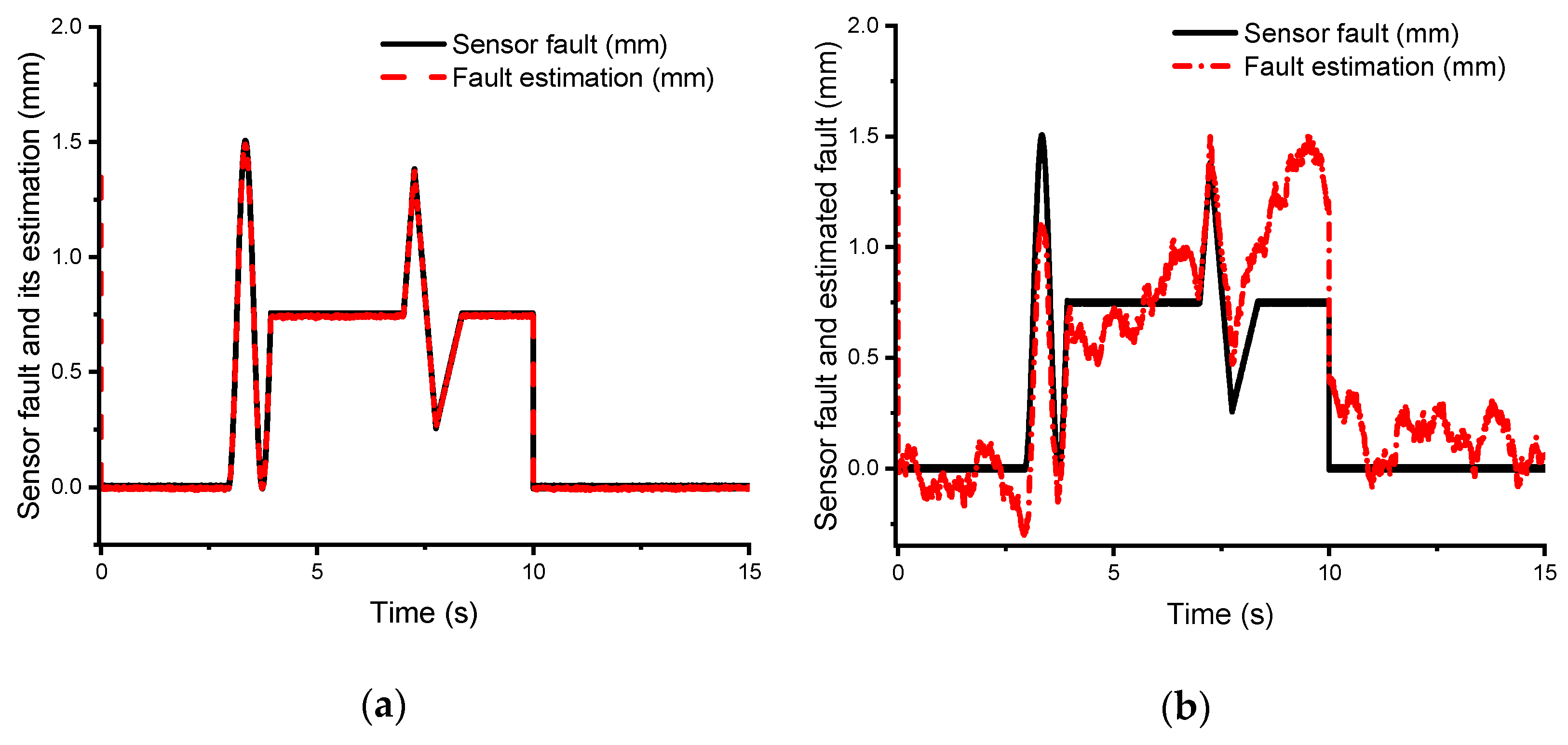
4.1. General Residual from the Sensor Fault Signal
4.2. Sensor FTC Compensation
4.3. Simulation and Results
4.3.1. The parameters of the MMP system
4.3.2. The Evaluated Equations of the PID Controller for the MMP System
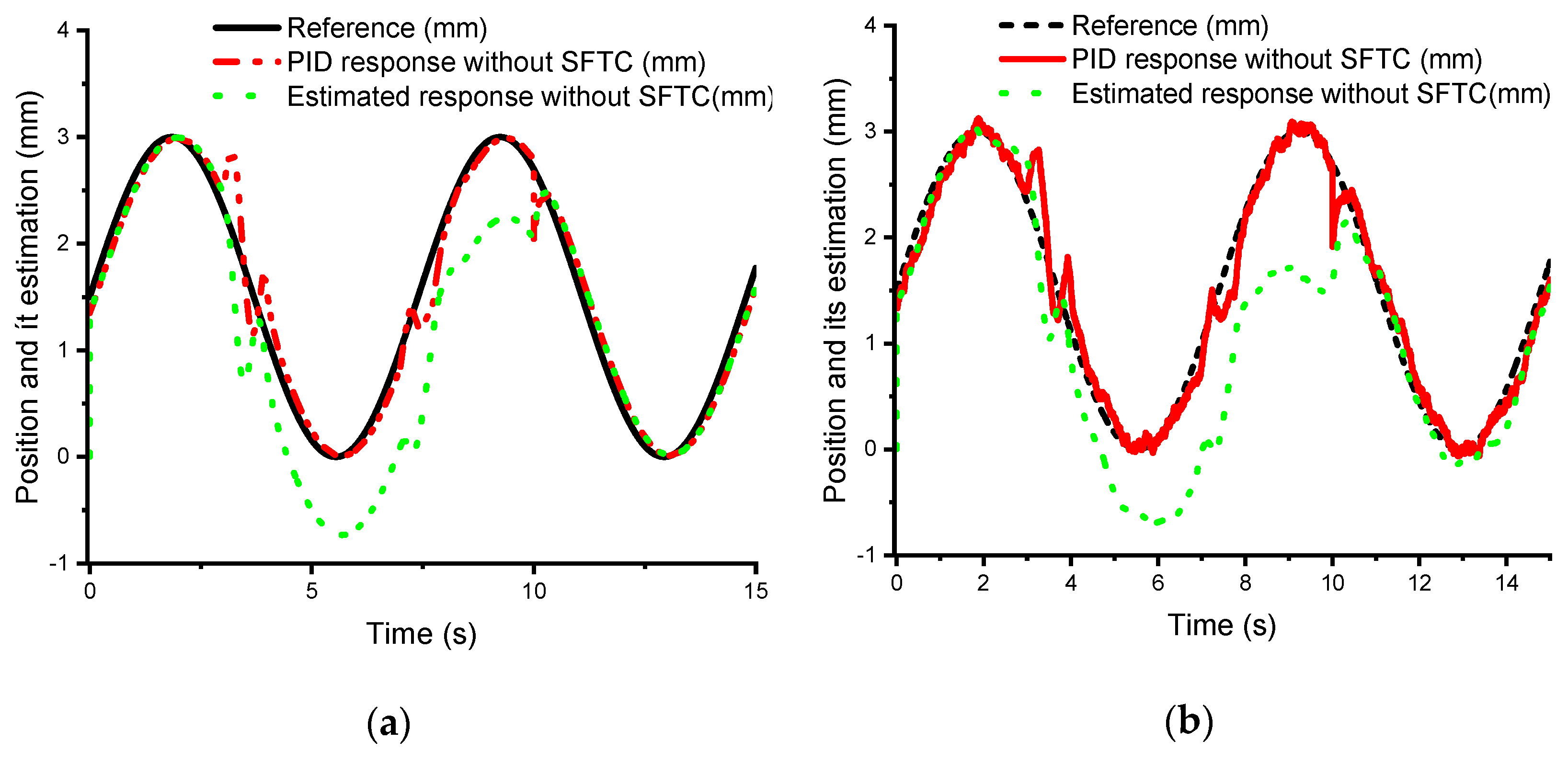
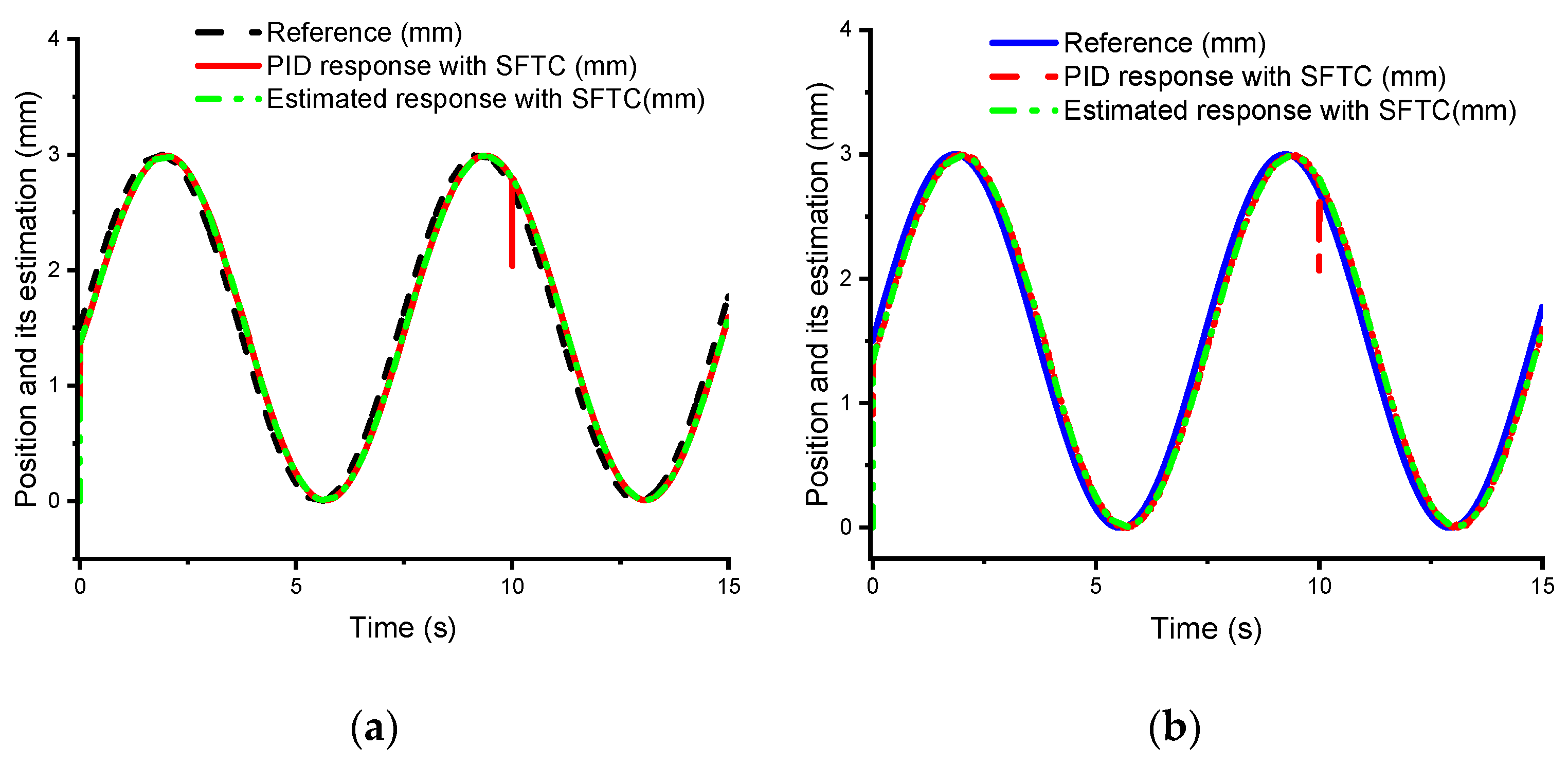
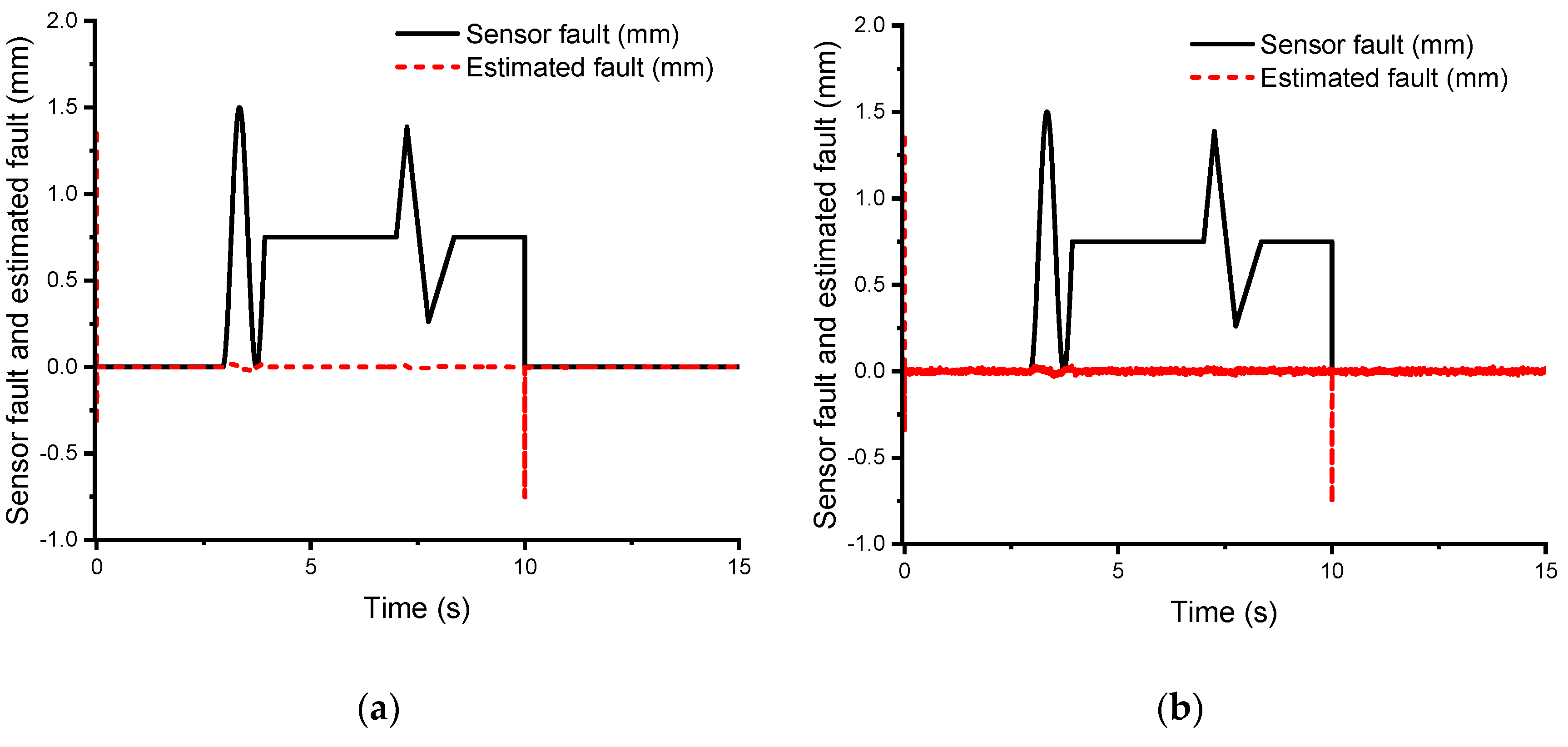
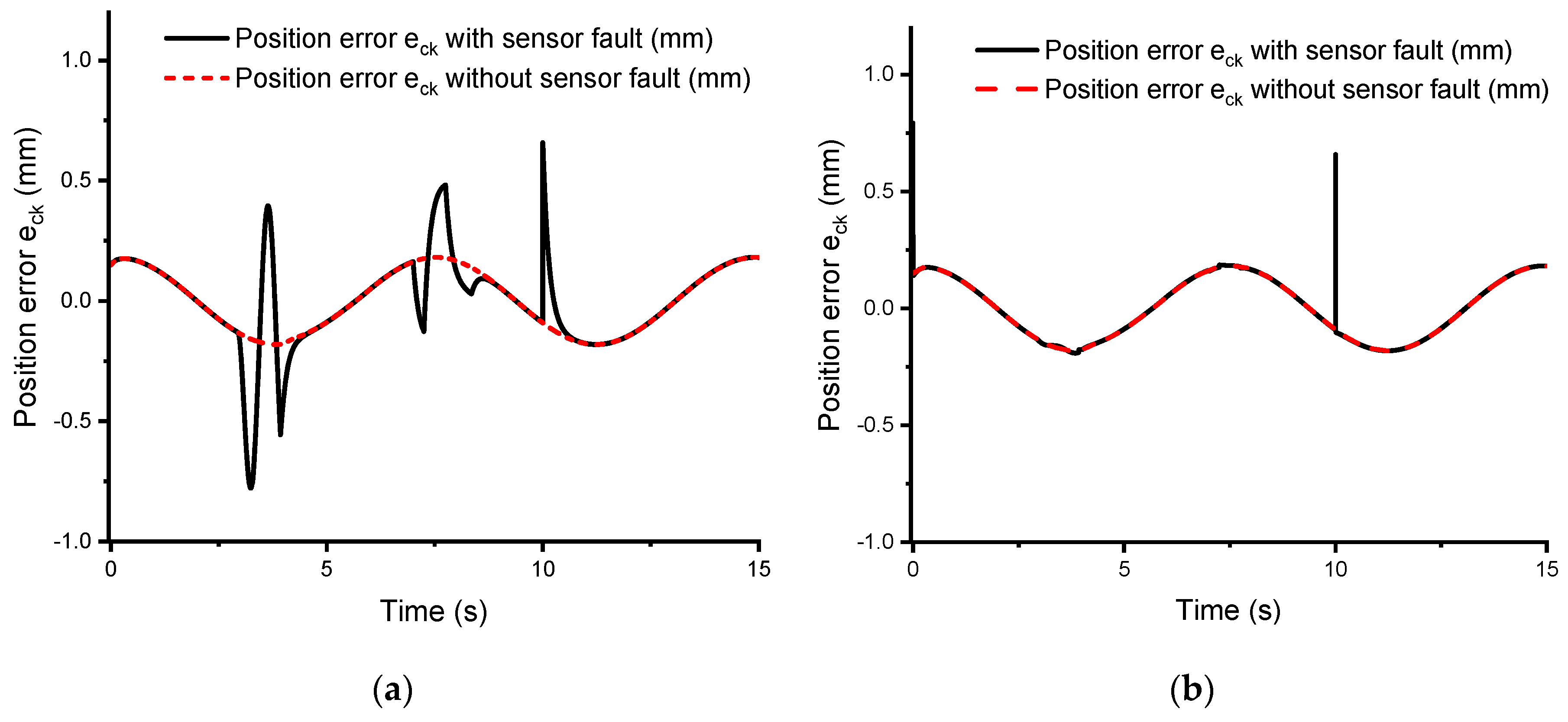
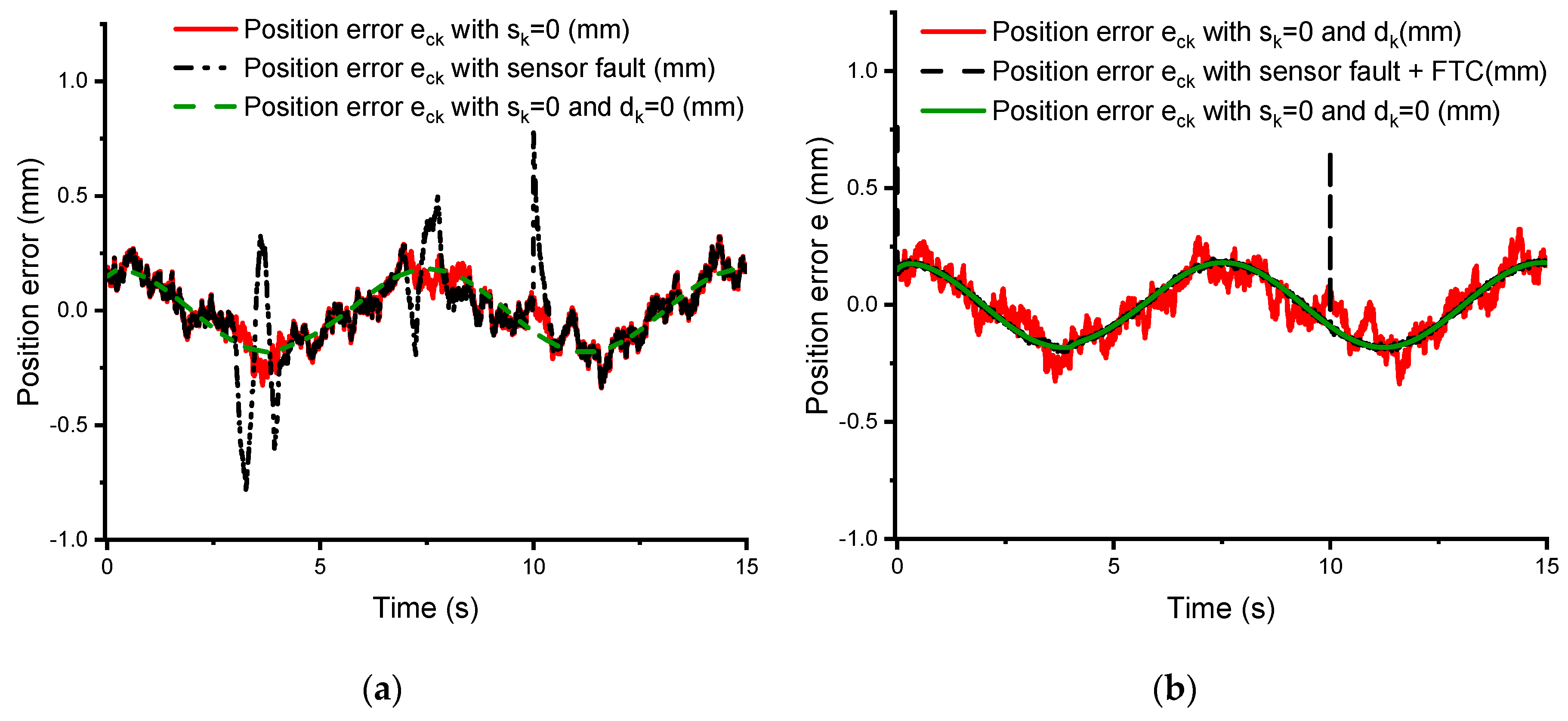
4.3.3. Simulation Results and Discussion
5. Conclusions
Author Contributions
Funding
Conflicts of Interest
References and Notes
- Nam, K.; Cho, K.; Park, S.S. Design and Performance Evaluation of an Electro-Hydraulic Camless Engine Valve Actuator for Future Vehicle Applications. Sensors 2017, 17, 2940. [Google Scholar] [CrossRef] [PubMed]
- Liu, C.; Jiang, H. A seventh-order model for dynamics response of an electro-hydraulic servo valve. Chin. J. Aeronaut. 2014, 27, 1605–1611. [Google Scholar] [CrossRef]
- Truong, Q.D.; Ahn, K.K. Force control for press machines using an online smart tuning fuzzy PID based on a robust extended Kalman filter. Expert Syst. Appl. 2011, 38, 5879–5894. [Google Scholar] [CrossRef]
- Rahmat, F.M.; Husain, A.R.; Ishaque, K.; Sam, Y.M.; Ghazali, R.; Rozali, S.M. Modeling and controller design of an industrial hydraulic actuator system in the presence of friction and internal leakage. Int. J Phys. Sci. 2011, 6, 3502–3517. [Google Scholar] [CrossRef]
- Ahn, K.K.; Nam, D.N.C.; Jin, M. Adaptive Back-stepping Control of an Electrohydraulic Actuator. IEEE/ASME Trans. Mechatron. 2014, 19, 987–995. [Google Scholar] [CrossRef]
- Tri, M.N.; Nam, C.N.D.; Park, G.H.; Ahn, K.K. Trajectory control of an electro-hydraulic actuator using an iterative backstepping control scheme. Mechatronics 2014, 29, 96–102. [Google Scholar] [CrossRef]
- Law, M.; Wabner, M.; Colditz, A.; Kolouch, M.; Noack, S.; Ihlenfeldt, S. Active vibration isolation of machine tools using an electro-hydraulic actuator. CIRP J. Manuf. Sci. Technol. 2015, 10, 36–48. [Google Scholar] [CrossRef]
- Ijaz, S.L.; Ashraf, M.A.; Mumtaz, M.F.; Ali, Y.; Baig, W.M. Fixed structured H∞controller design for aircraft control surface driven by power by wire hydraulic actuator. In Proceedings of the 2017 14th International Bhurban Conference on Applied Sciences and Technology (IBCAST), Islamabad, Pakistan, 10–14 January 2017; pp. 259–264. [Google Scholar] [CrossRef]
- Di Rito, G.; Denti, E.; Galatolo, R. Robust force control in a hydraulic workbench for flight actuators. In Proceedings of the 2006 IEEE Conference on Computer Aided Control System Design, 2006 IEEE International Conference on Control Applications, 2006 IEEE International Symposium on Intelligent Control, Munich, Germany, 4–6 October 2006; pp. 807–813. [Google Scholar] [CrossRef]
- Mohammad, A.; Danish, M.S.; Yuvraj, G.P.; Shubham, P.K. A Study on Landing Gear Arrangement of an Aircraft. Int. J. Innov. Res. Sci. Eng. Technol. 2017, 6, 2347–6710. [Google Scholar] [CrossRef]
- Ayman, A.A. Model Reference PID Control of an Electrohydraulic Drive. Int. J. Intell. Syst. Appl. 2012, 11, 24–32. [Google Scholar] [CrossRef]
- Noura, H.; Theilliol, D.; Ponsart, J.C.; Chamseddine, A. Fault-Tolerant Control Systems Design and Practical Applications; Michael, J.G., Michael, A.J., Eds.; Springer: Dordrecht, The Netherlands; Heidelberg, Germany; London, UK; New York, NY, USA, 2009; ISBN 978-1-84882-652-6. [Google Scholar] [CrossRef]
- Navid, N.; Nariman, S. A QFT Fault-Tolerant Control for Electrohydraulic Positioning Systems. IEEE Trans. Mechatron. 2002, 10, 626–632. [Google Scholar] [CrossRef]
- Fikret, C.; Chingiz, H. Active Fault-Tolerant Control of UAV Dynamics against Sensor-Actuator Failures. J. Aerosp. Eng. 2016, 29, 04016012. [Google Scholar] [CrossRef]
- Jing, H.; Lin, M.; Songan, M.; Changfan, Z.; Houguang, C. Fault-Tolerant Control of a Nonlinear System Actuator Fault Based on Sliding Mode Control. J. Control Sci. Eng. 2017. [Google Scholar] [CrossRef]
- Sami, M.; Patton, R.J. Active fault tolerant control for nonlinear systems with simultaneous actuator and sensor faults. Int. J. Control Autom. Syst. 2013, 11, 1149. [Google Scholar] [CrossRef]
- Noura, H.; Sauter, D.; Hamelin, F.; Theilliol, D. Fault-tolerant control in dynamic systems: Application to a winding machine. IEEE Control Syst. Mag. 2000, 20, 33–49. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z.; Zhang, A. Robust Fault Tolerant Control for Discrete-Time Dynamic Systems with Applications to Aero Engineering Systems. IEEE Access 2018, 6, 18832–18847. [Google Scholar] [CrossRef]
- Dongsheng, D.; Vincent, C. Fault diagnosis and fault tolerant control for discrete-time linear systems with sensor fault. IFAC-PapersOnLine 2017, 50, 15754–15759. [Google Scholar] [CrossRef]
- Nahian, A.S.; Truong, D.Q.; Chowdhury, P.; Das, D.; Ahn, K.K. Modeling and Fault Tolerant Control of an ElectroHydraulic Actuator. Int. J. Precis. Eng. Manuf. 2016, 17, 1285–1297. [Google Scholar] [CrossRef]
- Halim, A.; Christopher, E.; Chee, P.T. Fault Detection and Fault-Tolerant Control Using Sliding Modes; Springer: London, UK, 2011; ISBN 978-0-85729-649-8. [Google Scholar]
- Hamed, H.; Ian, H.; Silvio, S. Reliability improvement of wind turbine power generation using model-based fault detection and fault tolerant control: A. review. Renew. Energy 2019, 135, 877–896. [Google Scholar] [CrossRef]
- Bahareh, P.; Nader, M.; Khashayar, K. Sensor Fault Detection, Isolation and Identification Using Multiple Model-based Hybrid Kalman Filter for Gas Turbine Engines. IEEE Trans. Control Syst. Technol. 2016, 24, 1184–1200. [Google Scholar] [CrossRef]
- Jian, Z.; Akshya, K.S.; Sing, K.N. Robust Observer-Based Fault Diagnosis for Nonlinear Systems Using MATLAB. In Advances in Industrial Control; Michael, J.G., Michael, A.J., Eds.; Springer International Publishing: Basel, Switzerland, 2016; ISBN 978-3-319-32323-7. [Google Scholar] [CrossRef]
- Zhang, K.; Jiang, B.; Shi, P. Adjustable Parameter-Based Distributed Fault Estimation Observer Design for Multiagent Systems with Directed Graphs. IEEE Trans. Cybern. 2017, 47, 306–314. [Google Scholar] [CrossRef]
- Gao, Z.; Breikin, T.; Wang, H. High-Gain Estimator and Fault-Tolerant Design with Application to a Gas Turbine Dynamic System. IEEE Trans. Control Syst. Technol. 2007, 15, 740–753. [Google Scholar] [CrossRef]
- Liu, X.; Gao, Z. Novel unknown input observer for fault estimation of gas turbine dynamic systems. In Proceedings of the 2015 IEEE 13th International Conference on Industrial Informatics (INDIN), Cambridge, UK, 22–24 July 2015; pp. 562–567. [Google Scholar] [CrossRef]
- Gao, Z.; Ding, X.S. Sensor fault reconstruction and sensor compensation for a class of nonlinear state-space systems via a descriptor system approach. IET Control Theory Appl. 2007, 1, 578–585. [Google Scholar] [CrossRef]
- Jia, Q.; Li, H.; Zhang, Y.; Chen, X. Robust observer-based sensor fault reconstruction for discrete-time systems via a descriptor system approach. Int. J. Control Autom. Syst. 2015, 13, 274. [Google Scholar] [CrossRef]
- Khosrowjerdi, M.J. Robust Sensor Fault Reconstruction for Lipschitz Nonlinear Systems. Math. Prob. Eng. 2011. [Google Scholar] [CrossRef]
- Damianno, R.; Fatiha, N.; Vicenc, P. Robust QUASI–LPV Mode Reference FTC of a Quadrotor UAV Subject to Actuator Fauts. Int. J. Appl. Math. Comput. Sci. 2015, 25, 7–22. [Google Scholar] [CrossRef]
- Abderrahmen, B.; Djamel, S.; Kamel, K.; Samir, Z. Fault-Tolerant Lyapunov-Gain-Scheduled PID Control of a Quadrotor UAV. Int. J. Intell. Eng. Syst. 2015, 8. [Google Scholar] [CrossRef]
- Equations are used from the help tool Matlab 2017b version.
- Boyd, S.; Ghaoui, L.E.; Feron, E.; Balakrishnan, V. Linear Matrix Inequalities in Systems and Control Theory; SIAM: Philadelphia, PA, USA, 1994; ISBN 0-89871-334-X. [Google Scholar]
- Sofiane, A.A.; Arnaud, C.; Steven, B.; Nicolag, L. Continuous-Discrete Time-Observer Design for State and Disturbance Estimation of Electro-Hydraulic Actuator Systems. IEEE Trans. Ind. Electron. 2016. [Google Scholar] [CrossRef]









{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Components | Values | Units |
|---|---|---|
| Ah | 0.0013 | m2 |
| Ar | 9.4e-4 | m2 |
| Vch | 2.09e-4 | m3 |
| Vcr | 4.0065e-05 | m3 |
| mp | 10 | kg |
| 2.9e+08 | Pa | |
| 2383 | Nm | |
| Dp | 3.5e-6 | m3 |
| The Requirement Content | Without SFTC | With SFTC | ||
|---|---|---|---|---|
| (mm) | (%) | (mm) | (%) | |
| From 0.2 s to 5 s | 1.194 | 20.67 | 0.0194 | 98.06 |
| From 5 s to 9 s | 0.6074 | 34.9 | 0.0149 | 98.51 |
| From 0.2 s to 9 s | 1.194 | 27.79 | 0.0194 | 98.26 |
| From 9 s to 15 s | 0.7511 | 24.89 | 0.7515 | 24.50 |
| Content | Without SFTC | With SFTC | ||||||
|---|---|---|---|---|---|---|---|---|
| With | With | |||||||
| (mm) | (%) | (mm) | (%) | (mm) | (%) | (mm) | (%) | |
| From 0.2 s to 5 s | 1.1940 | 20.67 | 1.1181 | 25.46 | 0.0194 | 98.06 | 0.3961 | 73.60 |
| From 5 s to 9 s | 0.6074 | 34.9 | 0.7154 | 28.46 | 0.0149 | 98.51 | 0.3003 | 69.97 |
| From 0.2 s to 9 s | 1.1940 | 27.79 | 1.1181 | 26.96 | 0.0194 | 98.26 | 0.3961 | 71.76 |
| From 9 s to 15 s | 0.7511 | 24.89 | 1.1188 | -11.88 | 0.7515 | 24.50 | 0.8654 | 13.46 |
© 2019 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (http://creativecommons.org/licenses/by/4.0/).
Share and Cite
Van Nguyen, T.; Ha, C. Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator. Processes 2019, 7, 89. https://doi.org/10.3390/pr7020089
Van Nguyen T, Ha C. Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator. Processes. 2019; 7(2):89. https://doi.org/10.3390/pr7020089
Chicago/Turabian StyleVan Nguyen, Tan, and Cheolkeun Ha. 2019. "Sensor Fault-Tolerant Control Design for Mini Motion Package Electro-Hydraulic Actuator" Processes 7, no. 2: 89. https://doi.org/10.3390/pr7020089