1. Introduction
Face-gear transmission began to be applied in helicopter transmission systems as a new type of transmission solution in the 1990s, and it has significant advantages, such as good power distribution effect, low vibration, and low noise. The tooth surface structure of face gears is complex, and there is a lack of unified detection standards, resulting in difficulty in evaluating the usability of processed face gears, which severely restricts the engineering application of face gears.
As one of the key research hotspots in the field of artificial intelligence, path planning has gained increasing attention from scholars [
1,
2]. Combining tooth-surface-detection path planning with intelligent optimization algorithms can simulate the gear-detection process. Reasonable tooth-surface paths can effectively capture the local features of the tooth surface. To improve the efficiency of measuring point detection of complex parts, many scholars have performed lots of research on finding an efficient and accurate algorithm to solve the path planning problem. Li et al. proposed an improved discrete firefly algorithm for the problem of free-form-surface-inspection planning and established a fitness function model suitable for solving the detection sequence of free-form surfaces [
3]. Chen et al. used an improved ant colony algorithm to perform path planning for free-surface measuring points, and their optimized results were found to be superior to those achieved by taboo search and genetic algorithms [
4]. Aiming at the path planning problem in a complex environment, You et al. used the improved ant colony algorithm to not only accelerate the convergence speed but also effectively improve the quality of the optimal solution [
5]. Sun Bo et al. improved and optimized the genetic algorithm to make the improved algorithm more efficient in AGV path planning [
6].
However, in the actual detection process, the accuracy will be affected by the geometric error of the detection equipment itself, the type of probe, and the corresponding data compensation method [
7,
8]. Given this, many scholars have completed lots of research on the detection method of face gear. Shi et al. [
9] proposed an error compensation formula, which laid a theoretical foundation for coordinate detection of face gears. To solve the problem of pitch deviation of face gear, Tang et al. [
10] proposed the concepts of pitch-deviation surface and normal pitch-deviation surface of face gear, which provided a new method for manufacturing error evaluation of face gear. To address the issue of detecting the face gear of a three-axis numerical-control precision milling process, Lin Chao et al. [
11,
12] proposed a method for detecting and analyzing the normal deviation of the face gear in a gear inspection center using an orthogonal variable transmission ratio. Liu et al. [
13] put forward a method to compensate for the centering angle error included in the measurement results of pitch deviation, which improves the measurement accuracy. Fang et al. [
14] proposed a method based on the involute helical gear model and tooth-surface-detection theory to compensate for the alignment angle error contained in the pitch-deviation-detection results without changing the initial tooth-surface-detection results. Shi et al. [
15] established an involute helical gear model considering the alignment angle error of the gear shaft, which improved the detection accuracy of the tooth shape deviation of the involute helical gear. Gang et al. [
16] proposed a new type of hypoid gear with actual tooth surface error sensitivity, which improves the basic design performance. Zhang et al. [
17] proposed a new method to effectively compensate for the inclination measurement error caused by rotating and accelerating linear motion. Liu et al. [
18] provided an accurate mathematical model considering the error of work holding equipment and established the correspondence between transmission error and gear geometry. Liang et al. [
19] redefined the parameters of the three-sided cutting edge according to the tool error and established an accurate mathematical model of the tooth flank of the hypoid gear.
For the path planning of the coordinate detection of the tooth surface, sampling parameters, sampling strategy of measuring points, and path optimization of measuring points required in the detection of curved parts need to be determined according to the geometric feature information of the surface of the part to be measured. Guo et al. [
20] proposed to use the improved B-spline least-squares fitting method for adaptive sampling of measuring points. Chen et al. [
21] improved the ant colony algorithm using a negative feedback mechanism to improve the detection efficiency of free-form-surface measurement points. Zahmati et al. [
22] used the optimized particle-swarm-optimization algorithm to achieve the measurement point arrangement of the surface iteratively. Wang et al. [
23] combined the genetic algorithm and particle-swarm-optimization algorithm to propose a double global optimization algorithm for the path planning of welding robots. Fakoor et al. [
24] applied the fuzzy reasoning system to the Markov decision process to solve the obstacle-avoidance path planning of robots. Zhengcai et al. [
25] optimized the measurement sequence of test points by an ant colony algorithm to improve the detection efficiency. With the continuous improvement and development of the level of science and technology in today’s society, the solutions to the path planning problem are also constantly being improved and perfected, and the optimization problem of the detection path will inevitably become a key breakthrough to improve the efficiency of surface detection.
To sum up, many scholars have conducted lots of research on the algorithm and detection accuracy, but the algorithm of the complex-tooth-surface-detection path of face gears needs to be further improved. This paper complements the adaptive genetic algorithm with a simulated annealing algorithm while ensuring genetic evolution and simulated annealing search, achieving optimization in global search capability, convergence, and parameter self-adaptation. The results show that the algorithm improves the detection efficiency and has good adaptability, which can be applied to the detection of complex surface components.
2. Planning of Detection Paths
For the detection of the face-gear tooth surface, the current more realistic method is to measure the tooth surface coordinates at the mesh nodes at the CNC gear-measuring center or the coordinate-measuring machine according to the predetermined grid path throughout the whole tooth surface and then, through appropriate software processing, obtain the normal deviation at the mesh nodes and then obtain the geometric parameters of the surface and use the error-correlation-recognition technology. The accuracy of the tooth surface is rated.
2.1. Determination of Sampling Points for Detection
It is important to determine a reasonable number of detection points in the digitization of tooth surfaces. Too many sampling points will increase the data volume and reduce the detection efficiency. Too few sampling points will cause the loss of detailed information, affecting the accuracy of the detection effect. Therefore, based on the digitization of known tooth surfaces based on shape features, the adaptive sampling method of digitized tooth surfaces is studied.
Now, the determination of detection points is mainly concentrated on the regular surface, and the empirical formula of the number of detection points is given as
where
is the processing capacity coefficient, which is the ratio of the processing error to the machine-tool processing capacity, that is,
;
represents the quantile of normal distribution
; and
is the quantile of normal distribution
.
Based on this, the idea of dividing the tooth-surface sampling grid of the face gear is as follows: (1) Determine the tooth-surface-detection area; (2) The sampling points on the horizontal and vertical boundary lines were initially self-adaptive generation.
2.2. Determine the Tooth-Surface-Detection Area
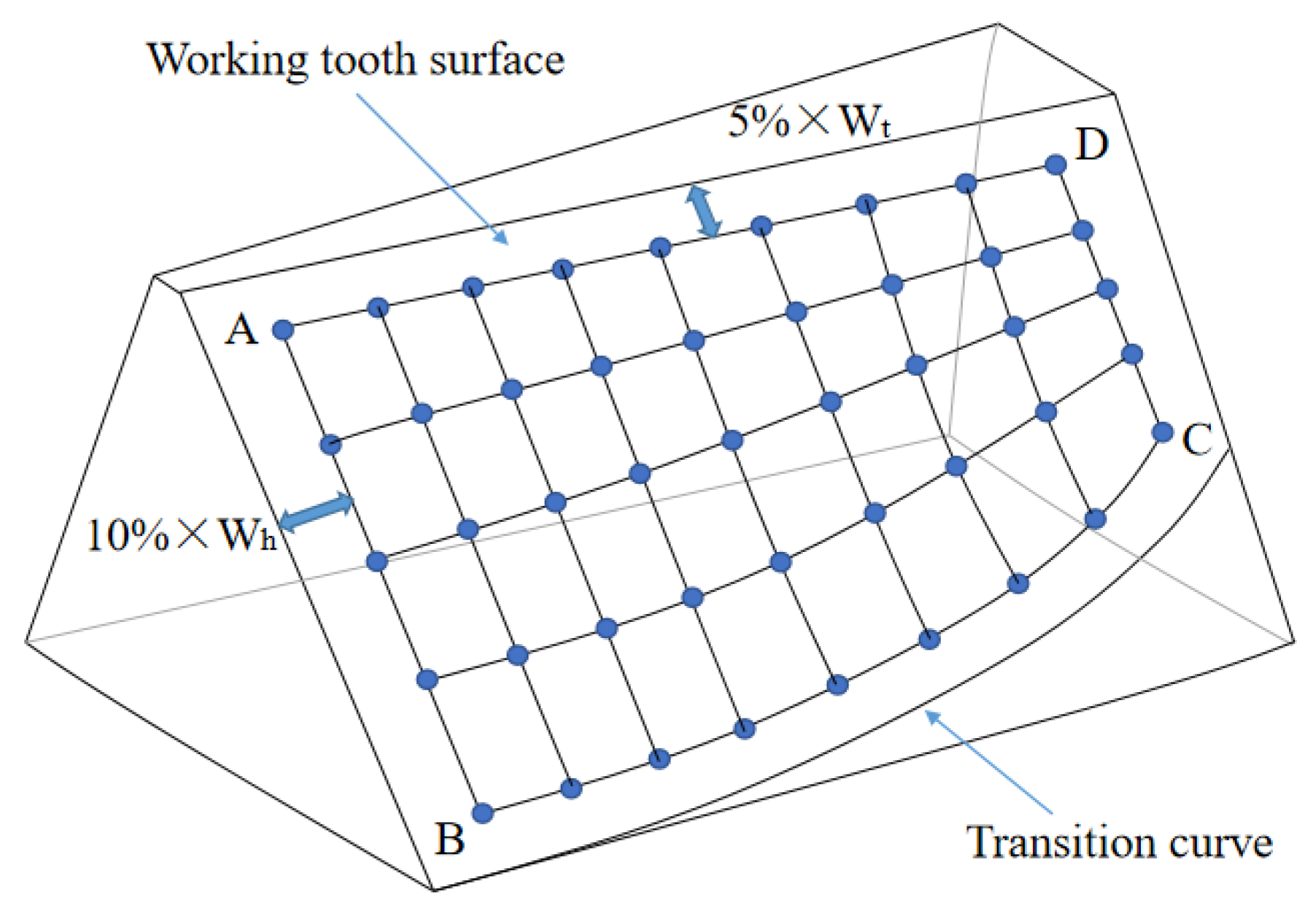
The planned detection area ABCD for the aircraft gear tooth surface is shown in
Figure 1. By AGMA 2009-B01, the tooth width direction is contracted inward by 10%, the tooth top is contracted downward by 5%, and the transition curve is contracted upward by 5%, where A is the projection of the cross-sectional line at the tooth location within the working area along the axis of the face gear and V is the face-gear tooth width. The detection area density is 5 × 9 grid points.
Based on the curvature information of the surface method, an algorithm is used to generate adaptive sampling points for the AD-direction boundary line and the CD-direction boundary line in
Figure 1. The equation for the working face of the face-gear tooth surface is as follows:
where
,
,
,
is the radius of the tool base circle,
is the number of teeth of the face gear,
is the number of teeth of the tool, and
is the angle parameter from the symmetry line of the tool slot to the starting point of the involute, assuming that the AD direction is the direction of change of parameter
and the AB direction is the direction of change of parameter
.
For each given grid node, the distance
R from the node to the axis of the gear and the vertical distance
Z along the axis of the gear can be obtained, where
R and
Z are functions of
and
, as shown in Equation (3):
where
is the iterative error,
x,
y,
z are the coordinates of the sampling point.
and corresponding to the mesh nodes can be obtained by the Newton iteration method, and the parameter coordinates can be substituted into the tooth surface Equation (2) to realize the tooth surface visualization.
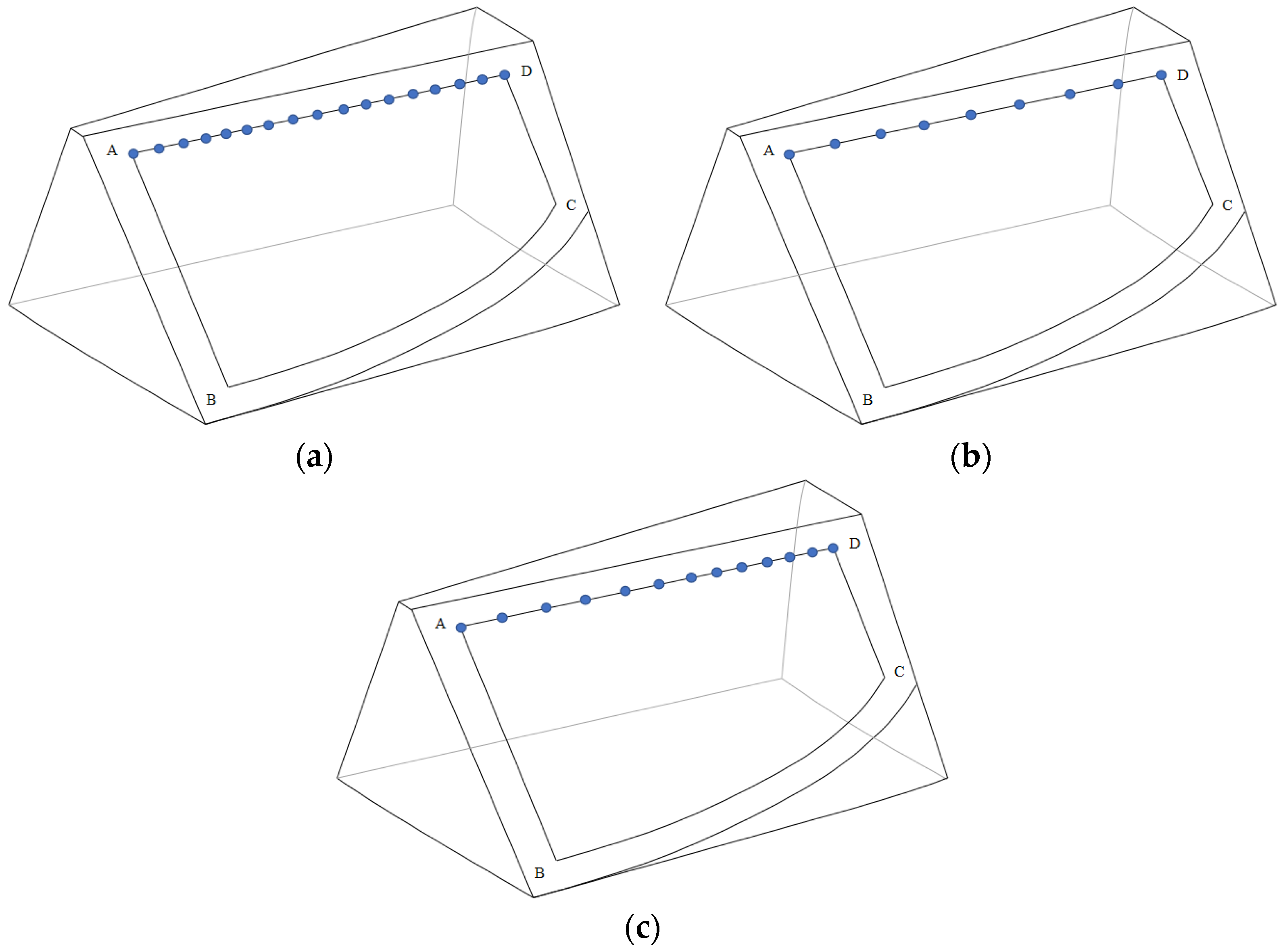
When the values of step size , feedback step size , and given accuracy are different, there are several sampling results (taking the horizontal direction as an example).
As indicated by the sampling results in
Figure 2, when the step size and feedback step size are the same, the smaller the given accuracy, the more sampling points there are and the weaker the adaptive effect. When the accuracy and feedback steps are given, the smaller the step size, the more sampling points, and the weaker the adaptive effect.
Considering the small size of the face gear used in this paper, it is not appropriate to make the sampling points too dense, so it is not recommended to use too small precision. In
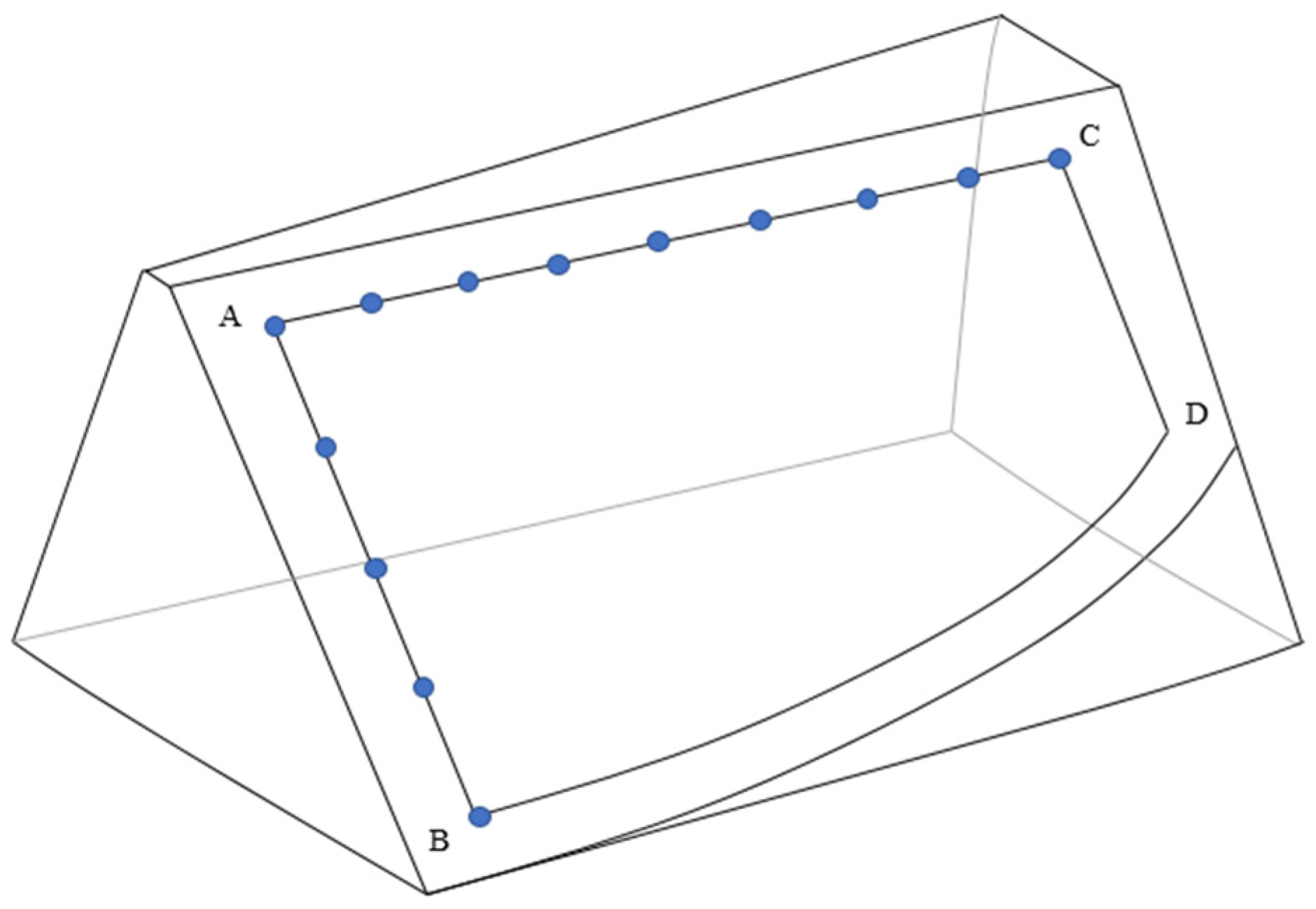
Figure 2b, the adaptive effect is obvious, and the number of sampling points is reasonable. Similarly, the longitudinal parameters are the same as the horizontal parameters. According to the above requirements, the boundary lines in the horizontal and vertical directions are traversed, the calculation results can be seen in
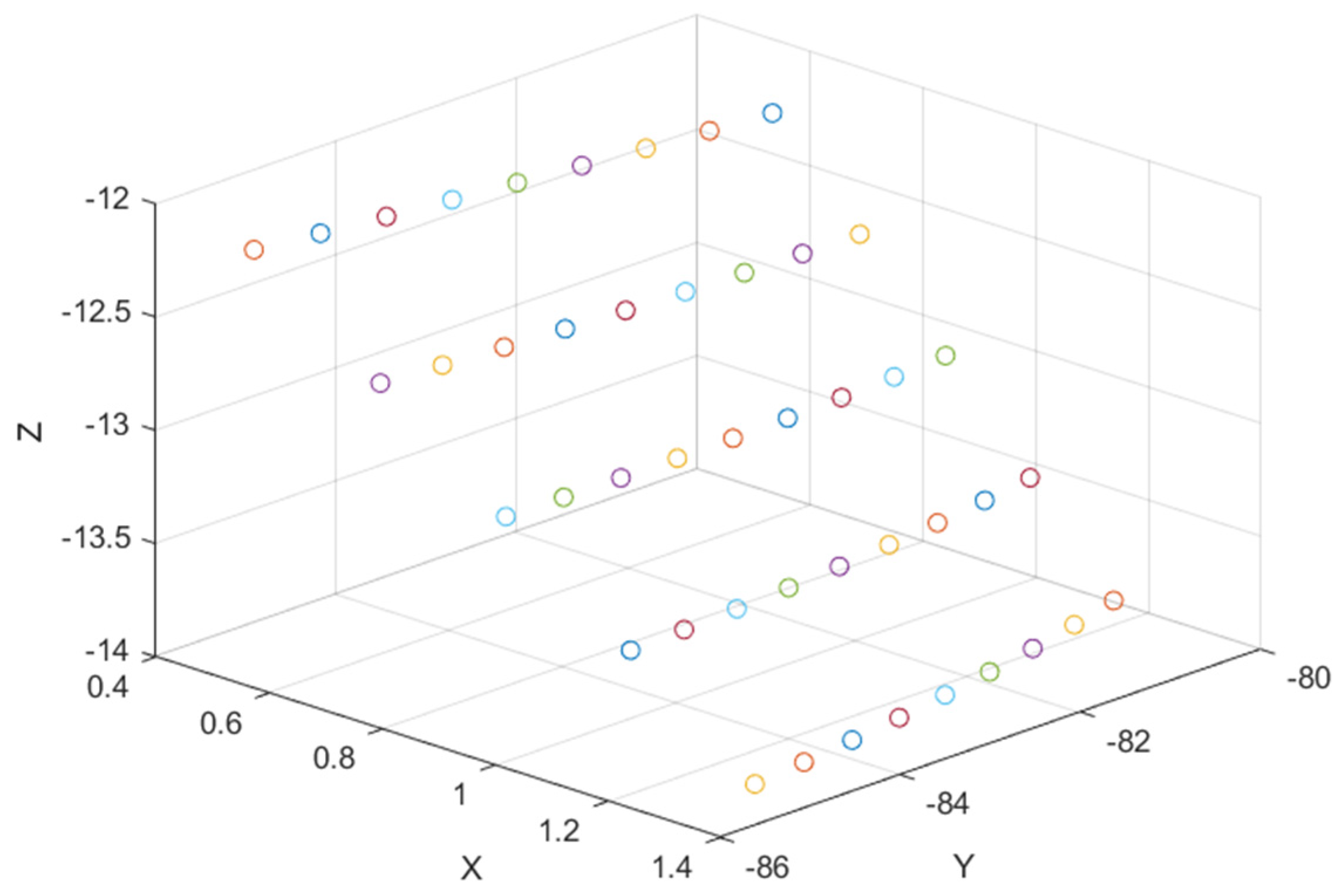
Figure 3.
As can be seen in
Figure 3, 9 sampling points are taken for the horizontal boundary line and 5 sampling points for the longitudinal boundary line, and the density of each sampling point tends to change with different curvatures.
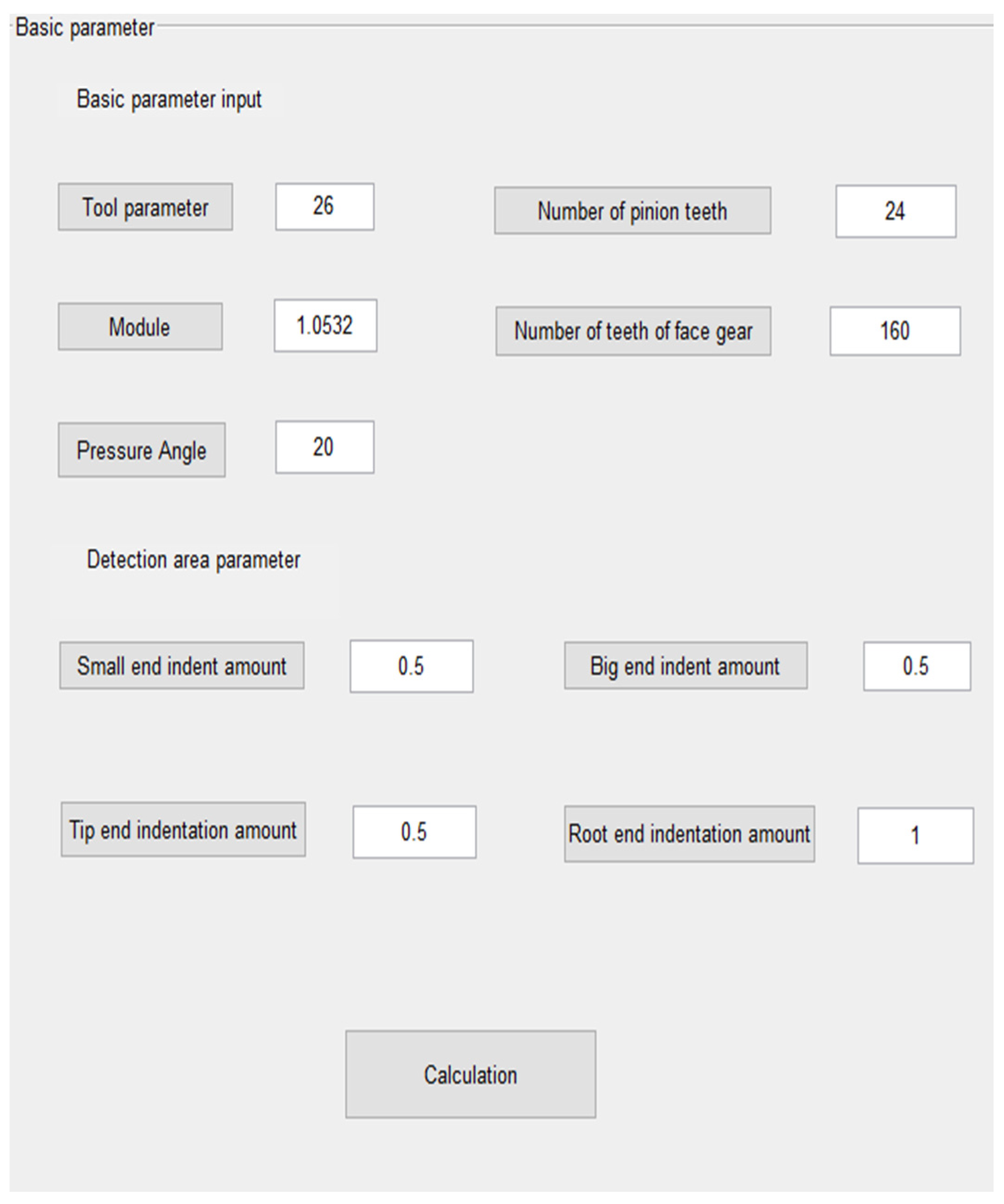
2.3. Adaptive Sampling System
Figure 4 shows the interface of the tooth point program. The gear-tooth-surface-point-calculation program includes the input of basic gear parameters, grid planning parameters, theoretical tooth-surface point calculation, and the calculation of adaptive parameters, which provide the primary adaptive tooth-surface point. This program is illustrated in
Figure 5.
3. Path Planning of Tooth-Surface Detection
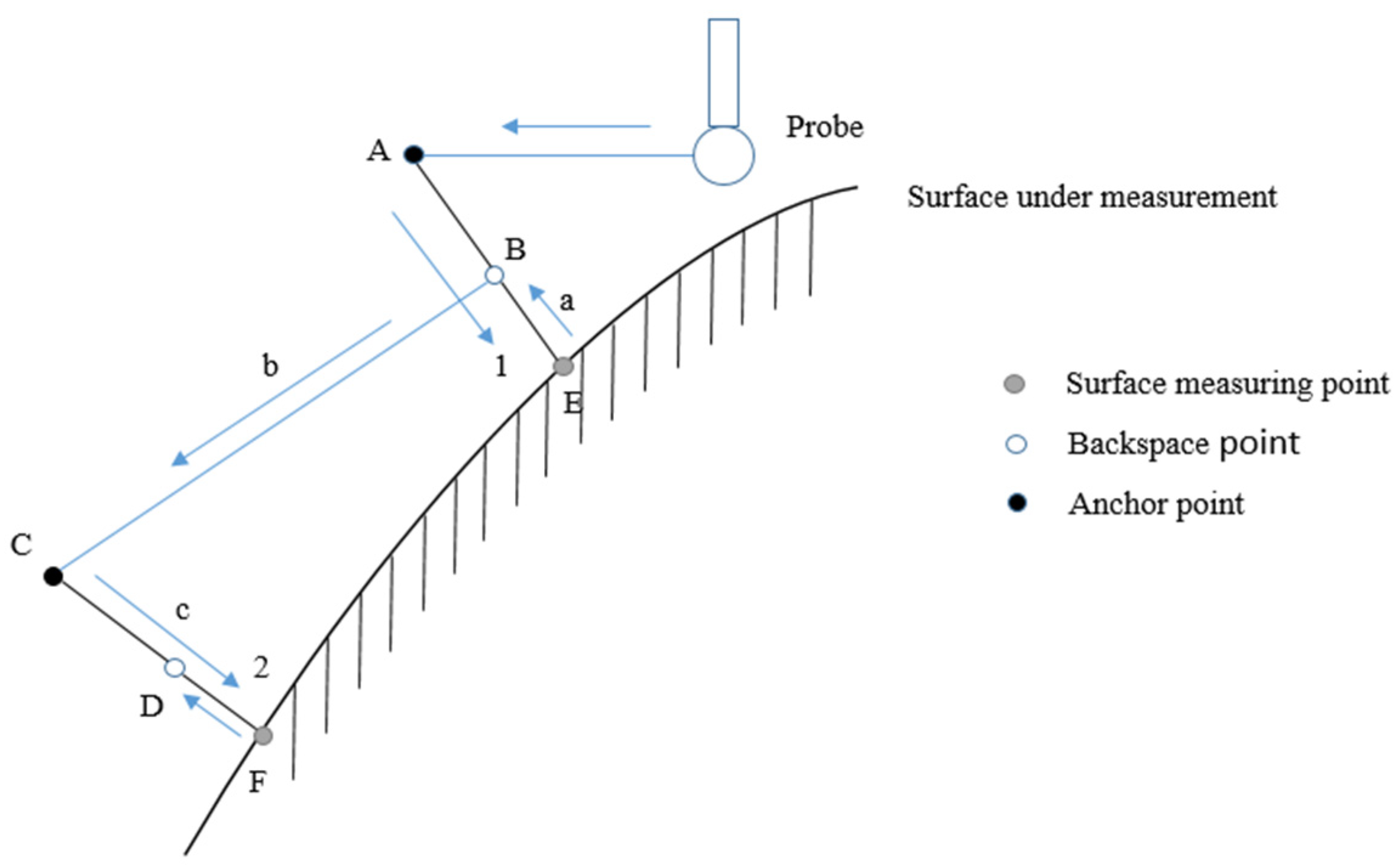
When the tooth surface is probed, the probe moves closer and then retreats along the normal vector of the measuring point. This process includes changes in probing speed, retreat speed, and movement speed. The movement path of the probe from the front measuring point to the lower measuring point is shown in
Figure 6. As can be seen from the two-point detection path in
Figure 4, the probe movement mainly consists of three parts, which are segment a, segment b, and segment c. It is further extended to other measuring points, where the distance between the measuring points in section a and section c is constant and only section b is different. The total operating distance of the probe is:
where
is the backtracking distance,
is the positioning distance, and
is the fast-moving distance between the
measuring point and
measuring point.
The purpose of establishing a measurement path is to detect sampling points orderly, quickly, and efficiently and to ensure that the probe will not collide during the inspection. In the actual detection, the position of the detection points, detection points, and quick fix points are fixed values. Therefore, to obtain the shortest detection path possible, it is necessary to optimize the path b segment. The objective function of optimizing the total path length
is as follows:
The detection error of the sampling point will affect the accuracy and stability of the final gear detection. Detecting path planning can make the distribution of sampling points more even. At the same time, during the algorithm optimization process, the calculation method and parameter settings of the algorithm can be optimized based on the distribution of sampling points, further improving the accuracy and stability of the algorithm. The relationship between tooth-surface-inspection path planning and algorithms is closely related and requires flexible application in practical use to obtain high-quality gear inspection data.
4. Improved Genetic Algorithm
4.1. Basic Principles of Genetic Algorithms
The genetic algorithm, proposed by Holland [
26], is an optimization algorithm inspired by natural selection and genetic mechanisms in genetics. Its basic idea is to simulate the evolution of organisms and humans to solve complex optimization problems. Genetic algorithms use population search techniques to represent a group of problem solutions. By applying a series of genetic operations, such as selection, crossover, and mutation, to the population, a new generation of individuals is produced, gradually evolving the population towards a state that contains an approximate optimal solution.
The details of algorithm path detection are as follows:
Step 1. Initialize parameters: A binary encoding method is adopted to randomly generate the population. The population size is 45, the number of iterations is 1000, the crossover probability is 0.7, the mutation probability is 0.03, and the generation gap is 0.8.
Step 2. Generation of the initial path: Import the coordinates of the tooth-surface points and calculate the initial path distance using Equation (4).
Step 3. Calculate fitness value: The fitness value represents the adaptability of individual pairs in the population. The smaller the value, the more likely they are to be eliminated. The design of the fitness function directly affects the performance of the genetic algorithm, so the relationship between the fitness function and the objective function in this chapter is
Step 4. Operator selection: Operator selection transfers the excellent individuals in the current generation to the next generation based on their fitness. To select individuals for crossover, multiple rounds of selection are required. Each round generates a random number inside, which is used as the selection pointer to determine the selected individual. Selection is then carried out using the “roulette wheel” method, with probabilities as follows:
Step 5. Crossover operator: The crossover operator utilizes a two-point crossover method. Two chromosomes V1 and V2 are randomly selected from the parent population, and two non-overlapping gene positions are chosen as crossover points. Subsequently, the gene segments at the two positions are exchanged.
Step 6. Mutation operator: The mutation operator is an operation that generates new individuals, improves the diversity and local search capability of the population, and avoids the phenomenon of early convergence of the algorithm. Mutation methods include inversion mutation and exchange mutation, and this paper adopts the method of exchange mutation.
Step 7. Continue iterating until the conditions are met and output the optimal result.
With the tooth point as the research object, the theoretical analysis was conducted on the influence of genetic algorithm parameters on algorithm performance. Taking the crossover and mutation operators as examples, their selection methods and principles directly affect the global convergence and solution efficiency of the genetic algorithm. It can be seen in
Table 1 and
Table 2.
It can be seen from the experimental results that, with other factors held constant, the optimal range for the crossover operator is [0.5, 1.5] and the optimal range for the mutation operator is [0.03, 0.07]. The local search ability of them is strong, and the convergence effect is better. (See
Table 2).
4.2. Algorithm Improvement
Genetic algorithm has good global search ability, but it is prone to premature convergence. Based on the simulated annealing algorithm, the initial temperature is set to a high value. As the temperature gradually decreases, a probability mutation feature is introduced to randomly search the initial temperature in the solution space, leading to the optimal value of the objective function. Based on the practical circumstances of optimizing the inspection path of helical gears, the algorithm has been improved mainly in the following aspects:
- (1)
To improve the search ability in the early stage of evolution and the convergence speed in the later stage, an adaptive crossover mutation probability algorithm is introduced.
- (2)
Using the Metropolis criterion with the simulated annealing algorithm, this problem is assessed and the inferior solutions are accepted within a predetermined range. Subsequently, a cooling operation is performed on the problem at hand.
- (3)
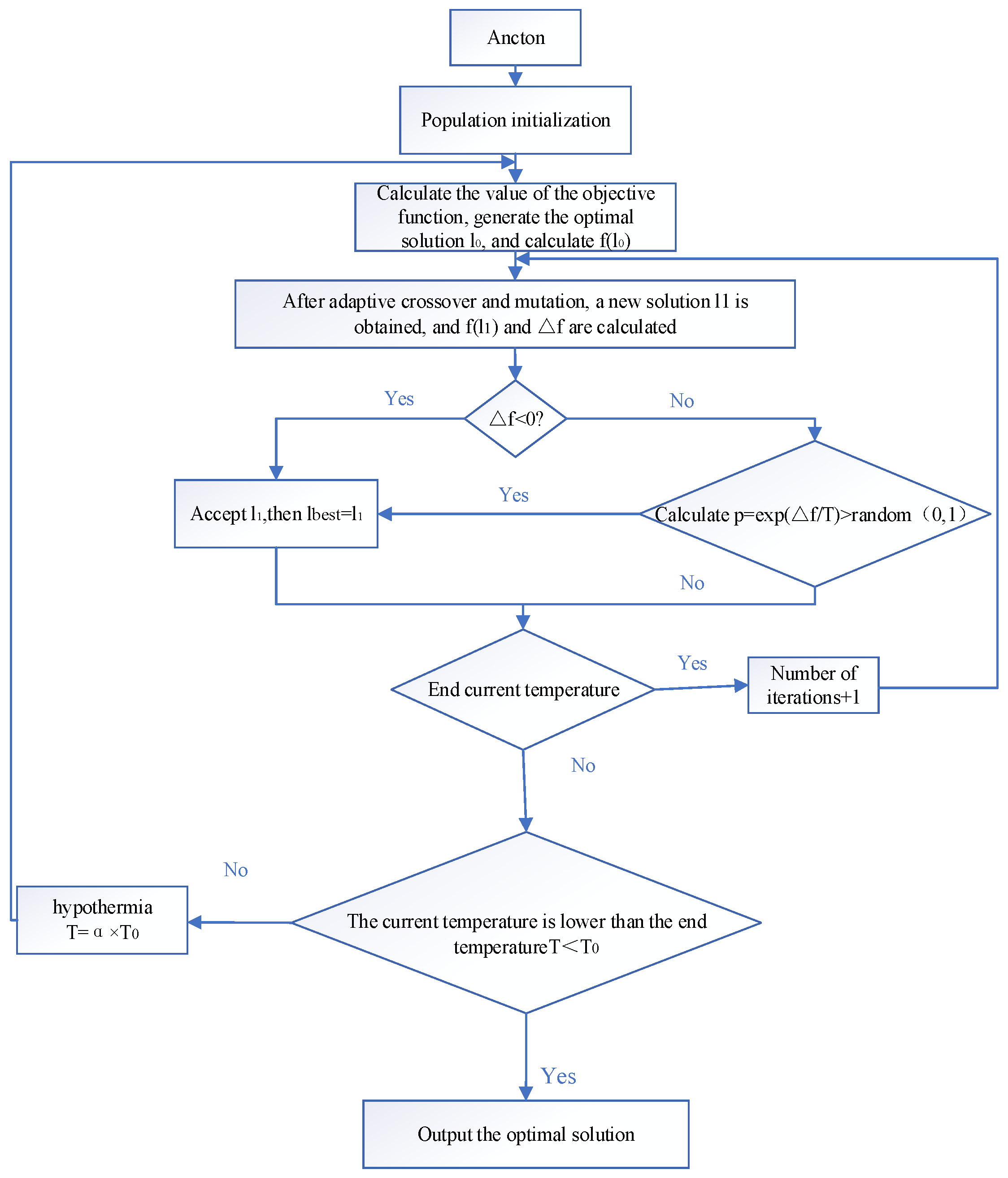
The selection method of the binary tournament is adopted, and the improved self-adaptive genetic simulated annealing algorithm workflow is shown in
Figure 7.
4.3. Algorithm Flow
Step 1: Import the coordinates of the tooth-surface-detection point and initialize the parameters: the population number is 45, the generation gap is 0.9, is 0.99, is 500 °C, is 10 °C, and , , , and .
Step 2: Initialization. Using a three-coordinate detection machine, a path from the starting point to the destination is selected as a chromosome. Additionally, the path is encoded using numbering. The maximum iteration count of the proposed algorithm is also set as a termination criterion.
Step 3: Combining with Equation (3), to minimize l, the fitness function is set as
where
is the length of the path in the segment
. The fitness of each individual is determined according to the fitness function.
Step 4: After selecting half of the next-generation population using a binary tournament method, the remaining elite individuals are then used to select 30% of the new-generation population, which is combined to form the offspring population.
Step 5: Cross operation. The cross operation mainly refers to the exchange of genetic information between two pairs of parents, resulting in two new offspring.
Step 6: Adaptive crossover and mutation operation. The adaptive genetic algorithm, by changing the probabilities of crossover and mutation under different fitness values, can improve convergence speed and prevent premature convergence of the algorithm. Therefore, an adaptive value method is used to determine the value of
and
:
where
is rewritten as is the overall maximum degree of adaptation,
is the average fitness value of each generation of the population,
is an individual with a higher degree of adaptation for two individuals to be hybridized, and
is the adaptive value of the individual to be changed.
Step 7: Mutation operation. A random number is generated for each chromosome. If , take any two positions to exchange coordinate numbers, otherwise no variation occurs, where is the probability of variation.
Step 8: Perform a reverse transformation embed the simulated annealing algorithm and accept a new solution based on the Metropolis criterion. The expression is as follows:
where
T is the current temperature,
is the difference between the total distance of the new route and the current route and a random number
is generated. If
, the current new solution is accepted. Then the system cools down, and the expression is
where
T0 is the initial temperature, and
α is the cooling rate.
5. Algorithm Simulation
To compare the path optimization effect of various algorithms, the particle swarm optimization, simulated annealing algorithm, genetic algorithm, and adaptive genetic simulated annealing algorithm are respectively used to optimize the shortest path of the first generation of adaptive 45-tooth surfaces. Fifty experiments are carried out on each intelligent algorithm, and the average results are obtained. The optimized-detection-path distance and algorithm execution time are shown in
Table 1, and the resulting path-optimization-effect diagram can be seen in
Figure 8.
From
Figure 8 and
Table 3, the exploration path of the genetic algorithm is the most complex and longest, and the calculation time is relatively long. Compared with the genetic algorithm, the particle swarm algorithm has higher efficiency and less computation time, and it has a better optimization effect on the path. The simulated annealing algorithm has a small search path result, but there are crosses in the path result, which is not the best search result. On this basis, a new genetic algorithm is proposed, which has the smallest search path and the smallest convergence speed. The results indicate that, compared to the traditional simulated annealing method, this method can reduce the search route by 27.1% and 66.9%, respectively. Compared with the simulated annealing algorithm, the algorithm’s runtime is reduced by 17.2% and reduced by 60.7% compared with the genetic algorithm.
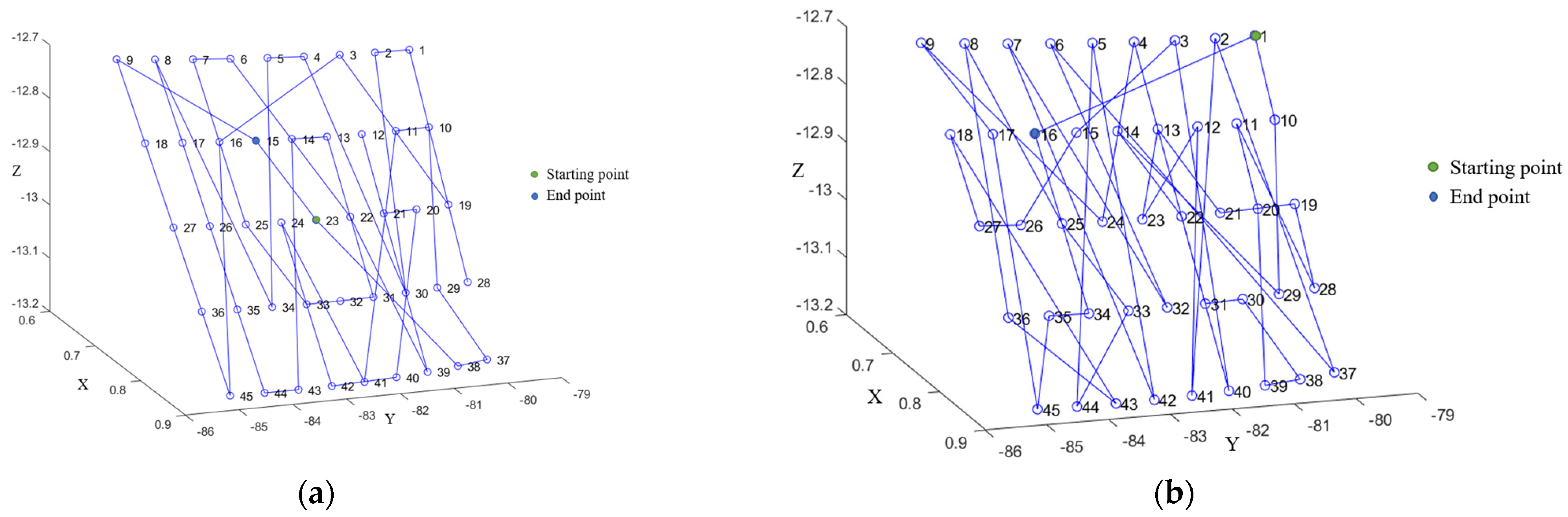
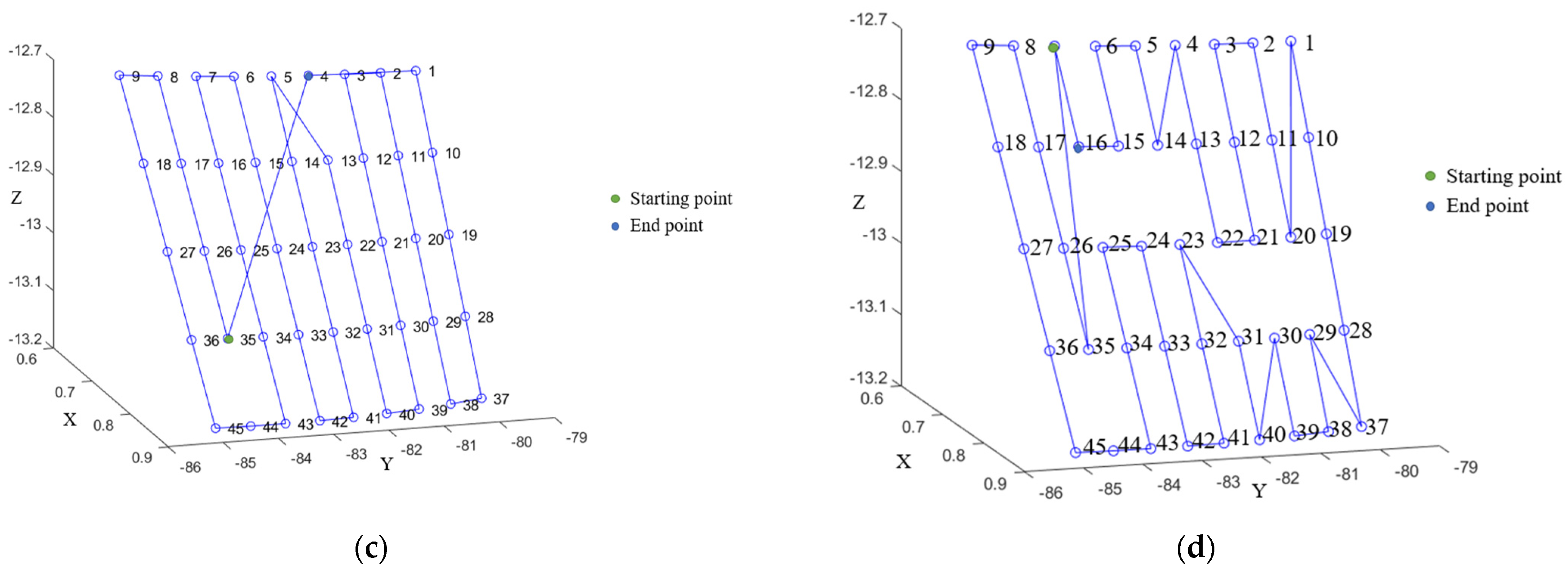
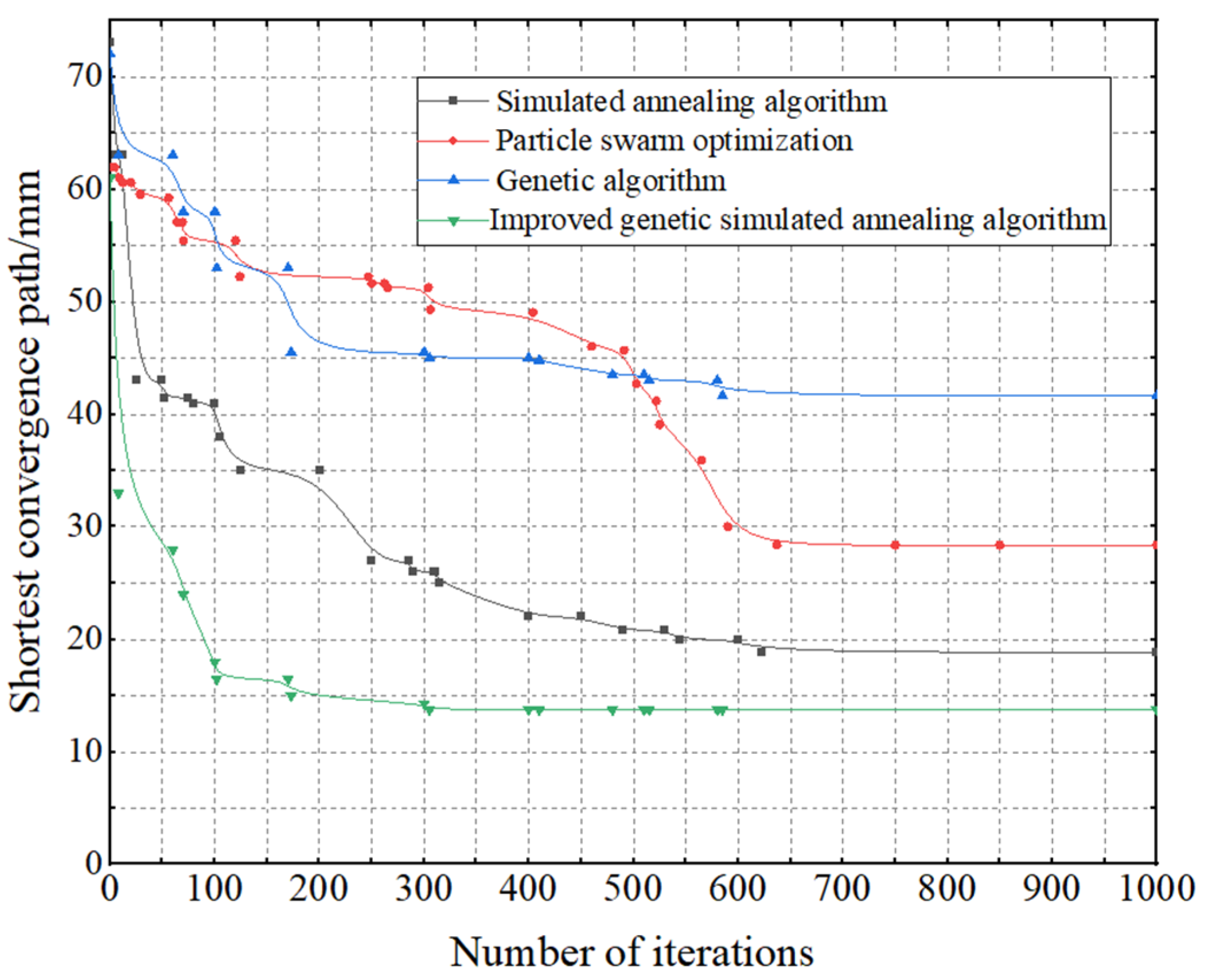
Each algorithm’s shortest path is shown in
Figure 9. Although the initial convergence path of the genetic algorithm is similar to that of the adaptive genetic simulated annealing, it is susceptible to premature convergence due to parameter influences, resulting in the worst convergence results. The adaptive genetic simulated annealing algorithm greatly improves the convergence accuracy and convergence speed, and the iterative optimal solution is much higher than other optimization algorithms.
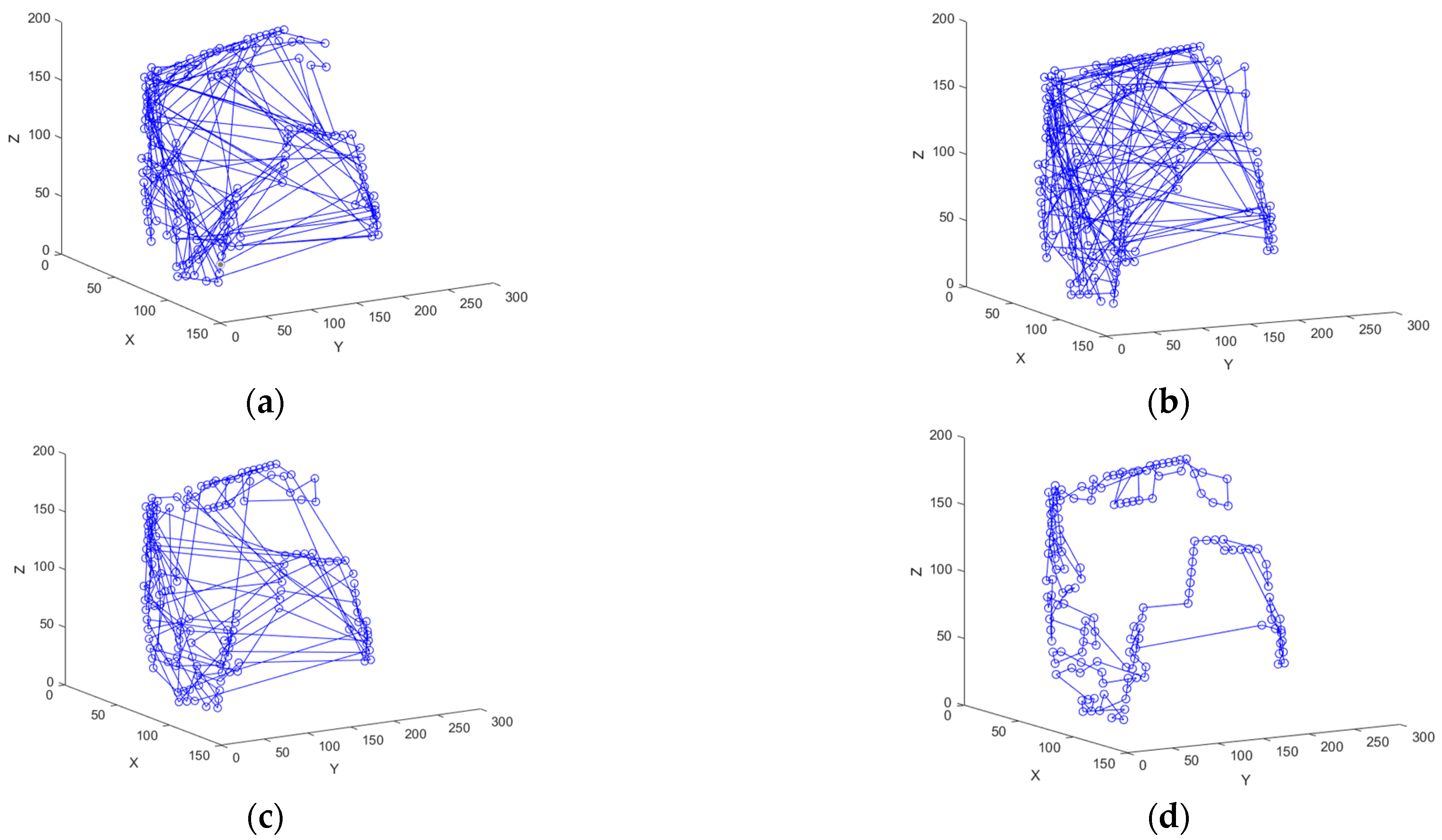
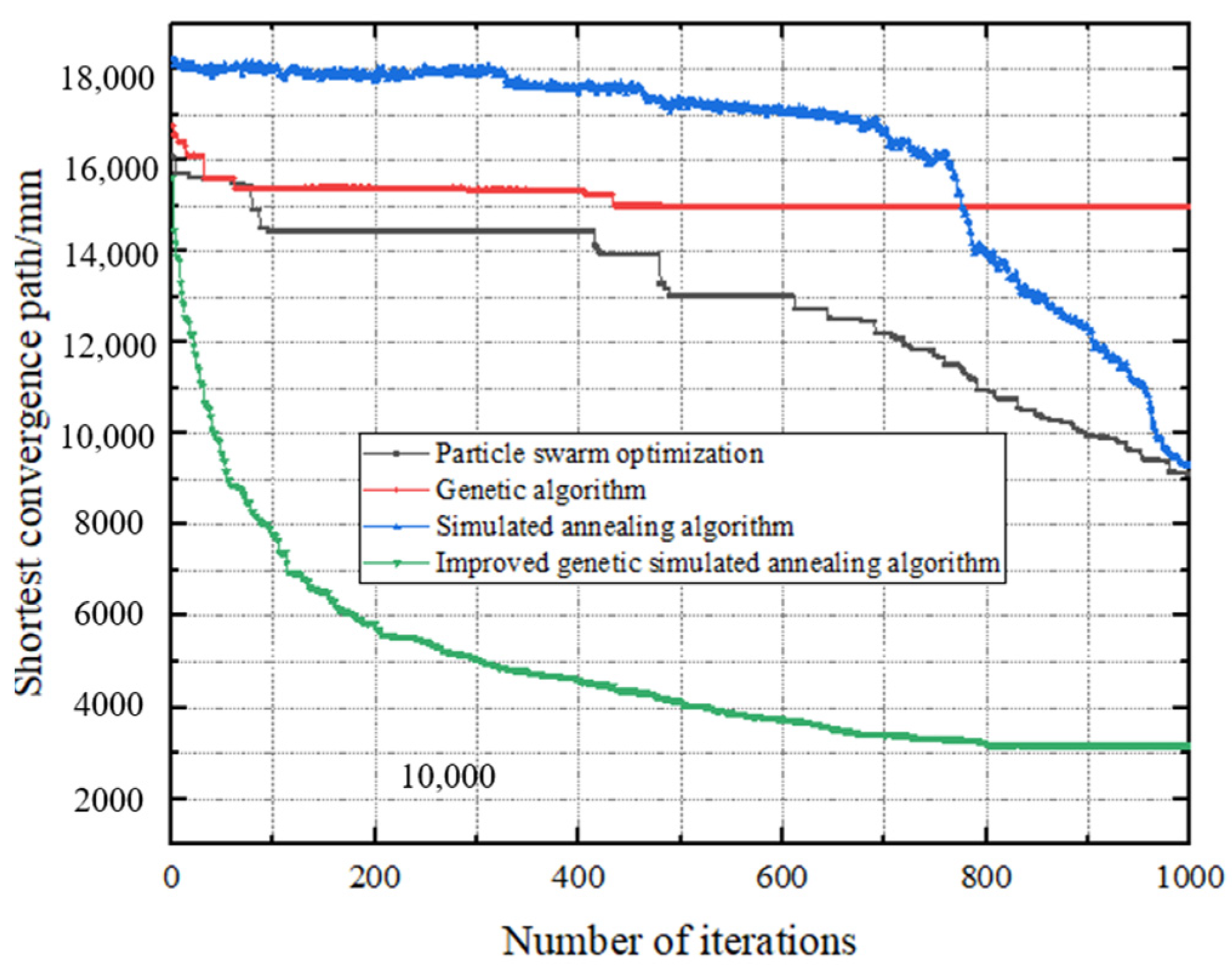
To verify the applicability of the algorithm, 150 sampling points are randomly selected for path detection. The path-detection diagram is shown in
Figure 10, and the shortest-iteration-convergence diagram is shown in
Figure 11.
It can be seen from
Figure 10 and
Figure 11 that the detection path is regular and reasonable, and the algorithm reaches convergence after 800 iterations. The optimal solution proves the applicability of the algorithm and provides an optimization algorithm with higher detection efficiency for surface detection.
6. Conclusions
A path optimization algorithm is proposed to improve the genetic algorithm, and its sampling method and sampling quantity are studied. The following conclusions are drawn from the research:
Based on the curvature information of the tooth-surface method, the edge of the sampling grid is preliminarily adaptive, and the shape information of the tooth surface can be reasonably extracted under the given sampling number. Thus, the adaptive sampling planning in the digital detection process of the face-gear tooth surface is realized.
Compared with the traditional genetic algorithm, the detection path of the improved algorithm is shortened by 66.9% and the detection efficiency is increased by 60.7%. The algorithm greatly improves the detection efficiency by adaptive adjustment of crossover, mutation, and cooling operations and provides an effective method to solve the free-form-surface detection of large-scale measurement points.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}