
Distributed Fixed-Time Secondary Control for MTDC Systems Using Event-Triggered Communication Scheme

Abstract
:1. Introduction
- (1)
- The paper introduces a distributed secondary fixed-time control scheme utilizing an event-triggered mechanism to achieve frequency restoration and active power sharing. This approach circumvents the communication loop problem in [32] and prevents Zeno behavior in [33]. Different from [34], the corresponding upper limit of convergence time is determined.
- (2)
- Through the strict stability principle, the sufficient conditions for the stability of event-trigger parameters and control-gain constraints in MTDC systems are proved. Compared with previous results in [10,34], the suggested approach demonstrates strong potential in effectively utilizing limited communication resources and control energies.
- (3)
- Compared with the existing methods in [22,23,25], the fixed-time algorithms presented in this paper exhibit a robust resistance to unknown external bounded interference, thereby enhancing the transient and overall robust performance of the MTDC system. Additionally, a set of simulation results validates the effectiveness of the proposed algorithm.
Notations
2. Preliminaries
2.1. Graph Theory
2.2. Lemma and Definition
3. Problem Formulation
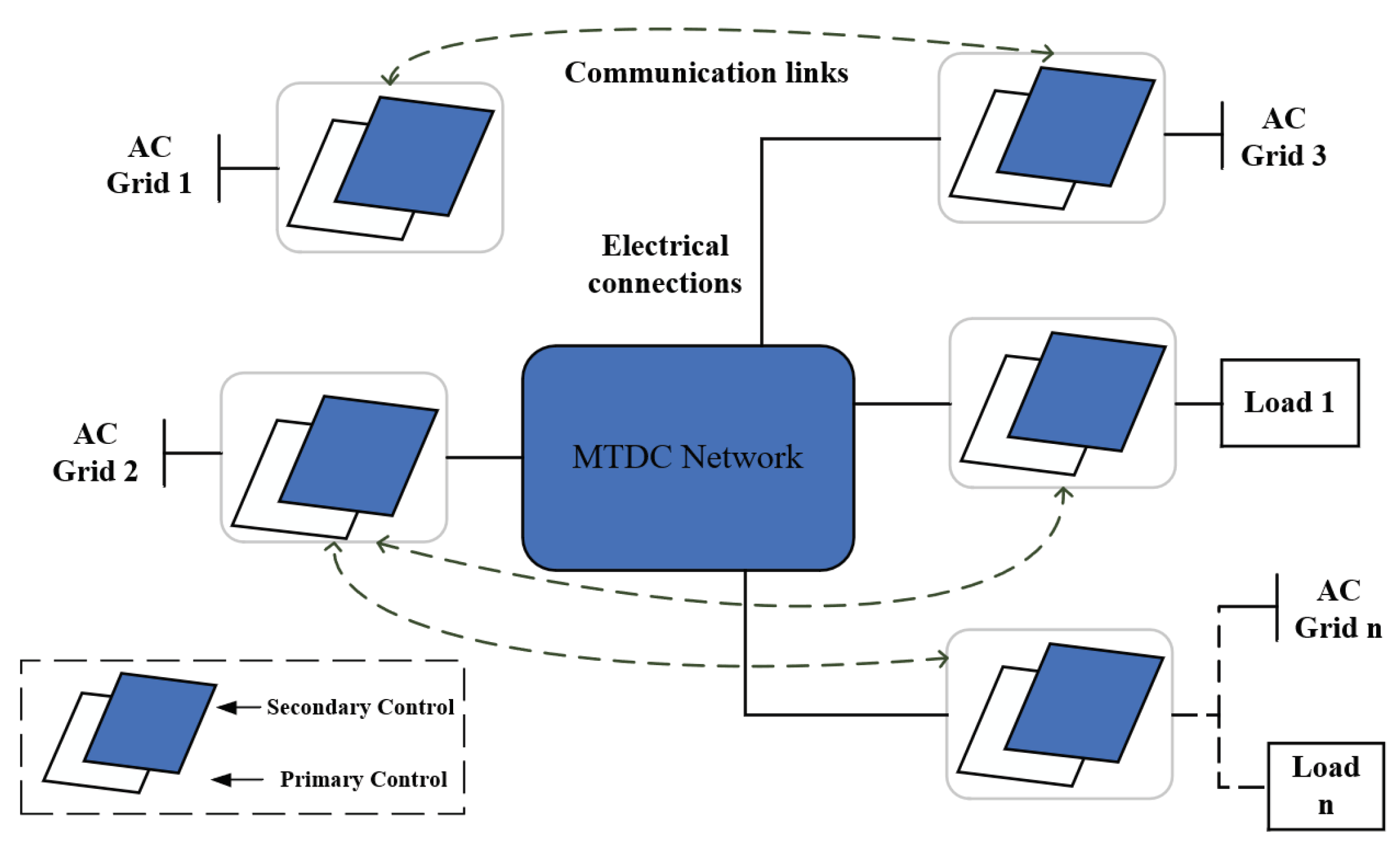
3.1. MTDC Systems
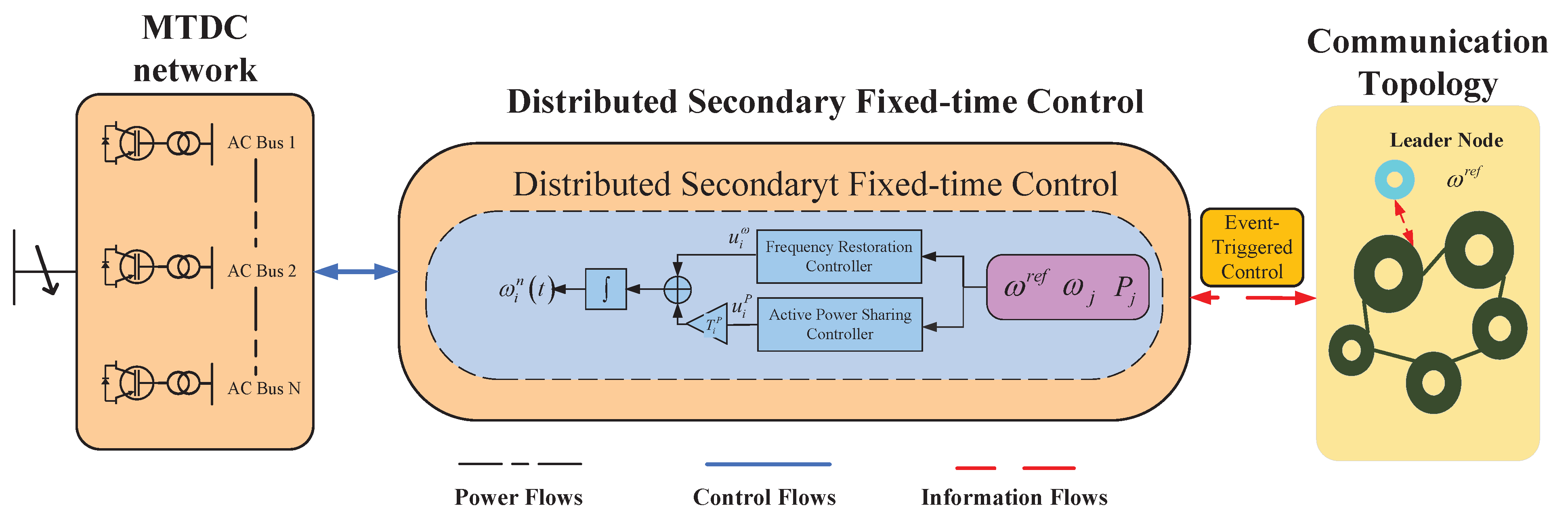
3.2. Control Hierarchy of MTDC System

3.3. Control Objectives
- (1)
- Frequency Regulation: to ensure the frequency recovery,
- (2)
- Active Power Sharing: to distribute active power flexibly in fixed-time while applying the event-trigger scheme,
4. Fixed-Time Control with Event-Triggered Communication Scheme
4.1. Fixed-Time Controller Design with Event-Triggered Scheme
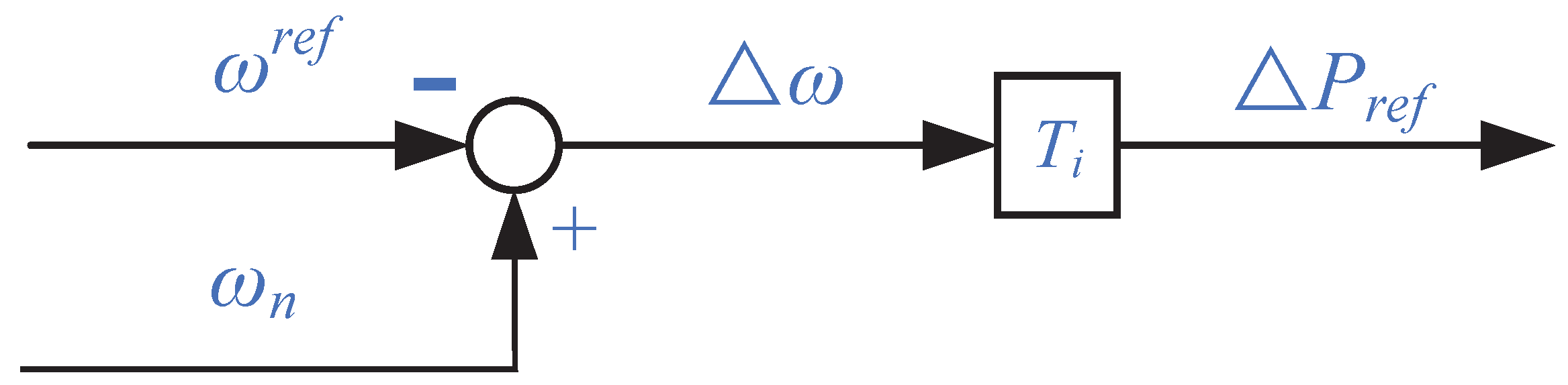
4.1.1. Frequency Recovery
4.1.2. Active Power Sharing
4.2. Stability Analysis
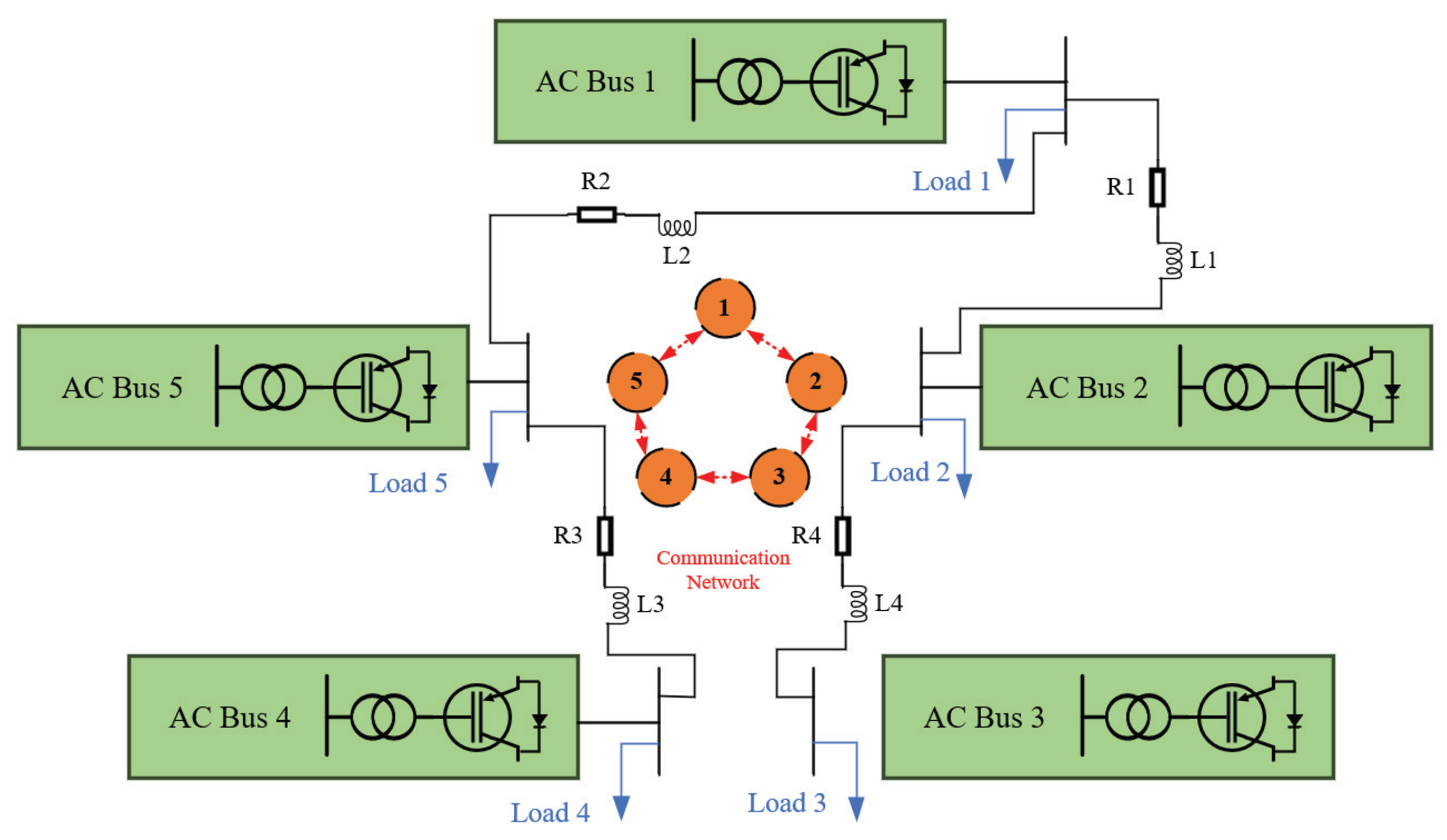
5. Illustrative Examples
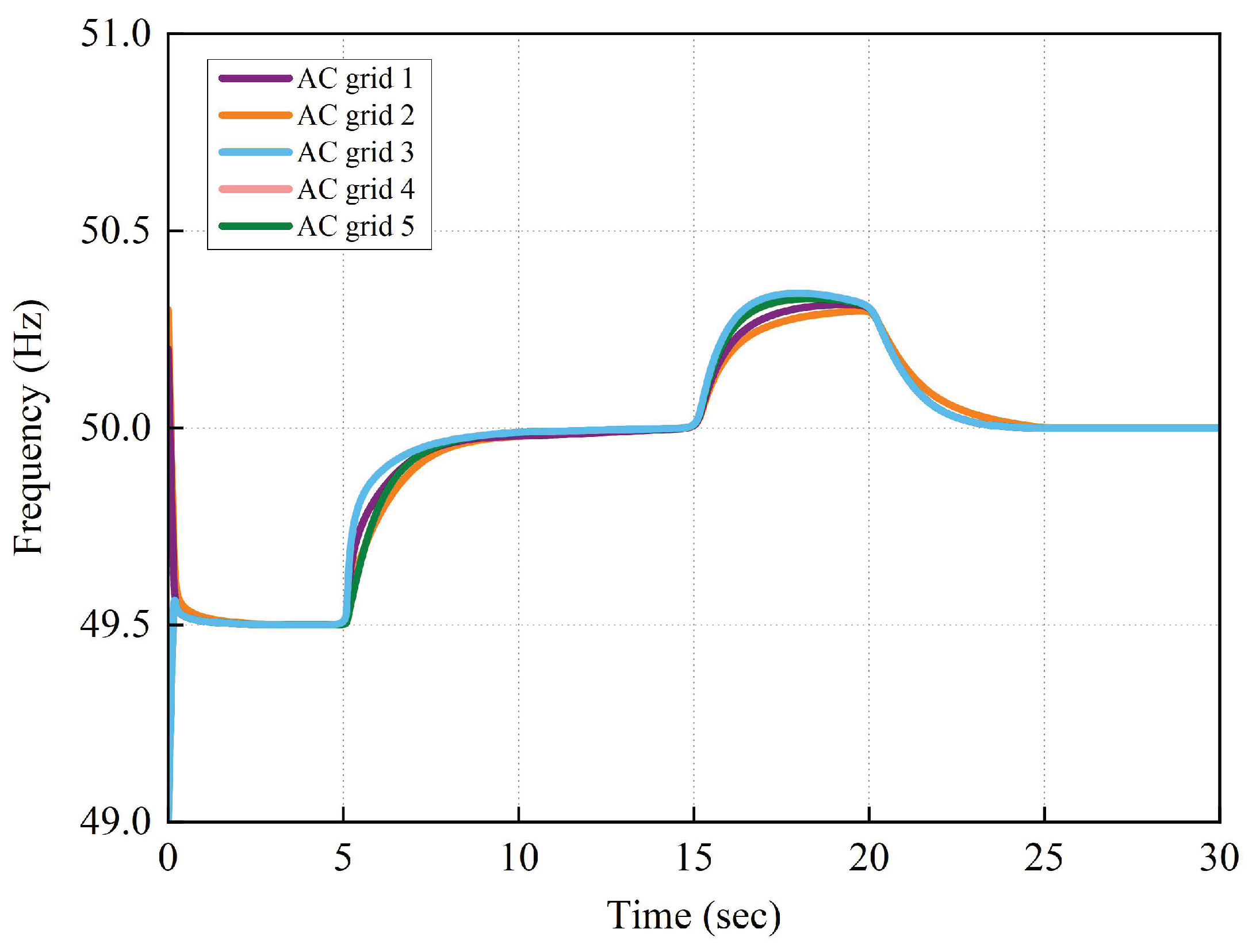
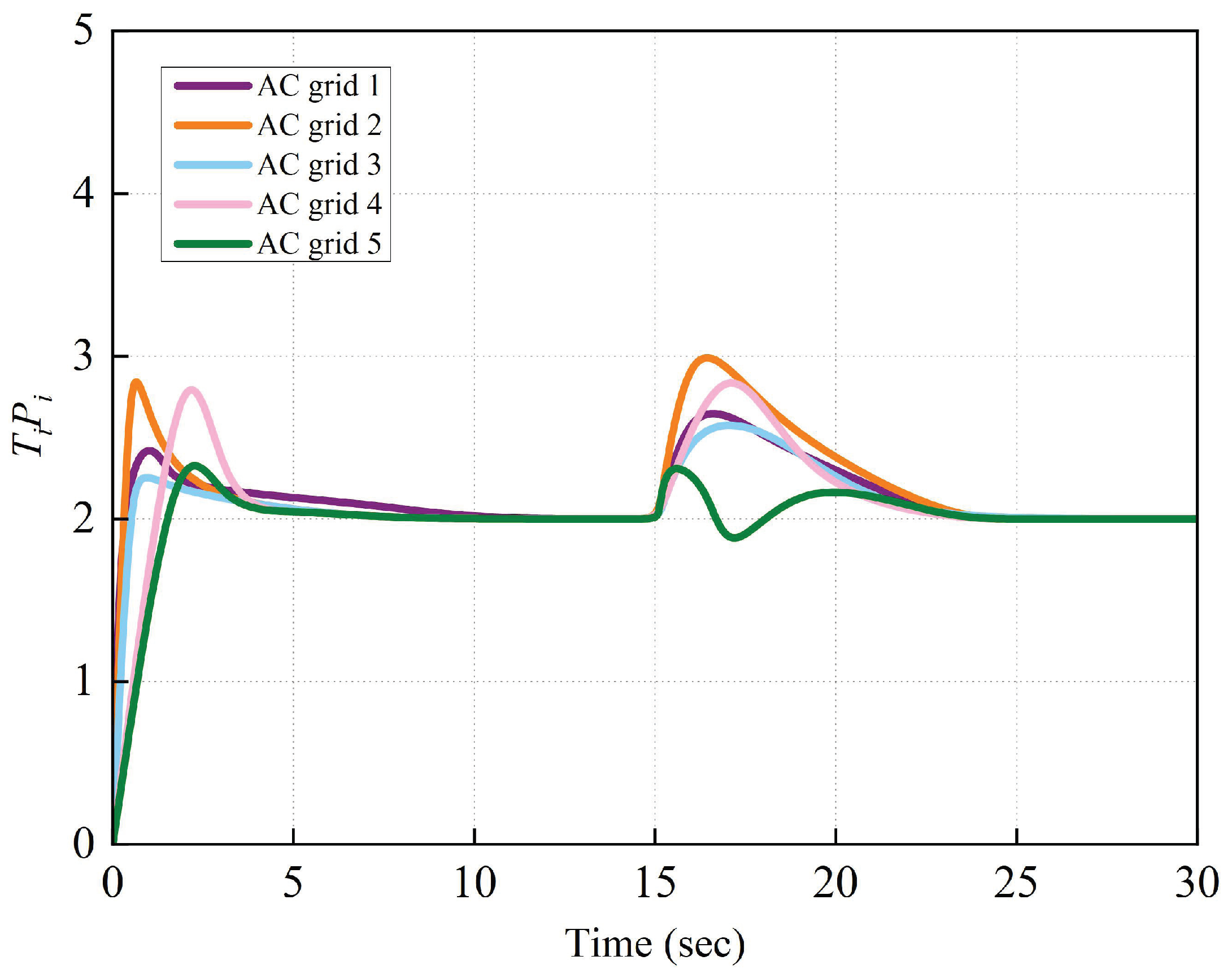
5.1. Load Change Circumstances
- (1)
- Within 0∼5 s, the primary control is activated and all loads work normally.
- (2)
- Within 5∼15 s, both the primary control and secondary control are activated, and all loads function normally.
- (3)
- Within 15∼20 s, only the primary control is activated, with Loads 2 and 3 operating normally, while Loads 1 and 4 are disconnected.
- (4)
- Within 20∼30 s, both the primary control and secondary control are operational, and Loads 2 and 3 function normally, while Loads 1 and 4 have been disconnected.
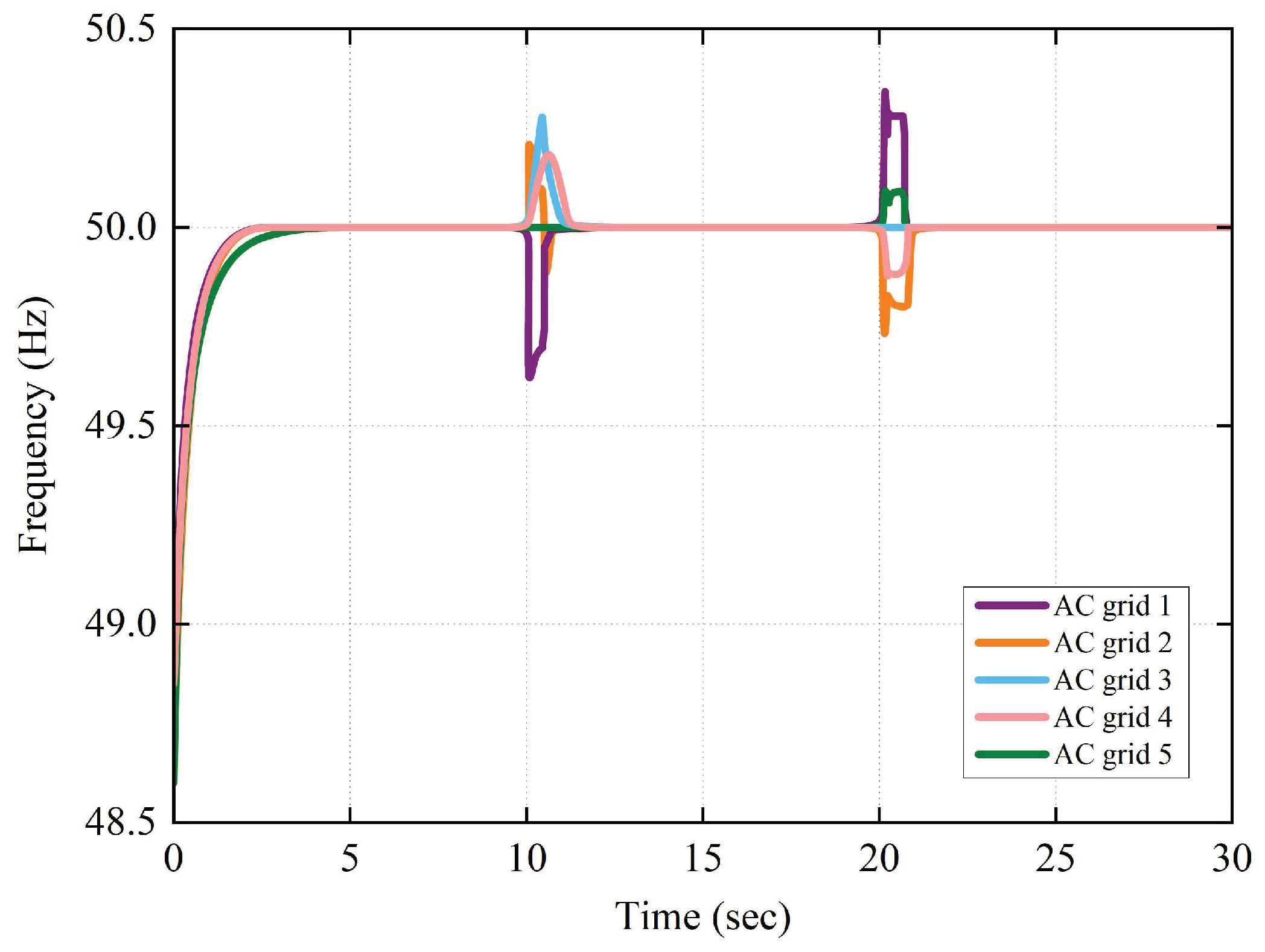
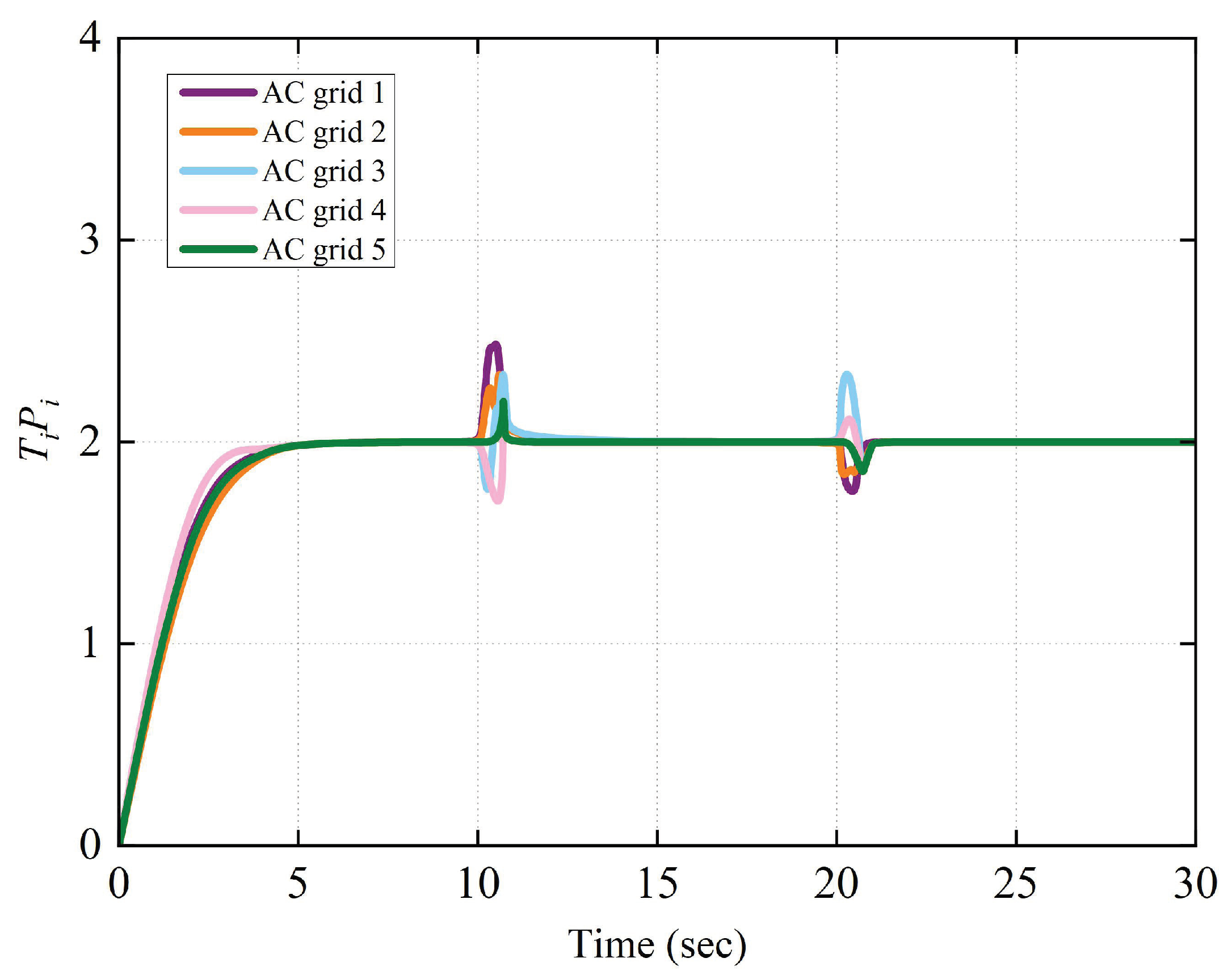
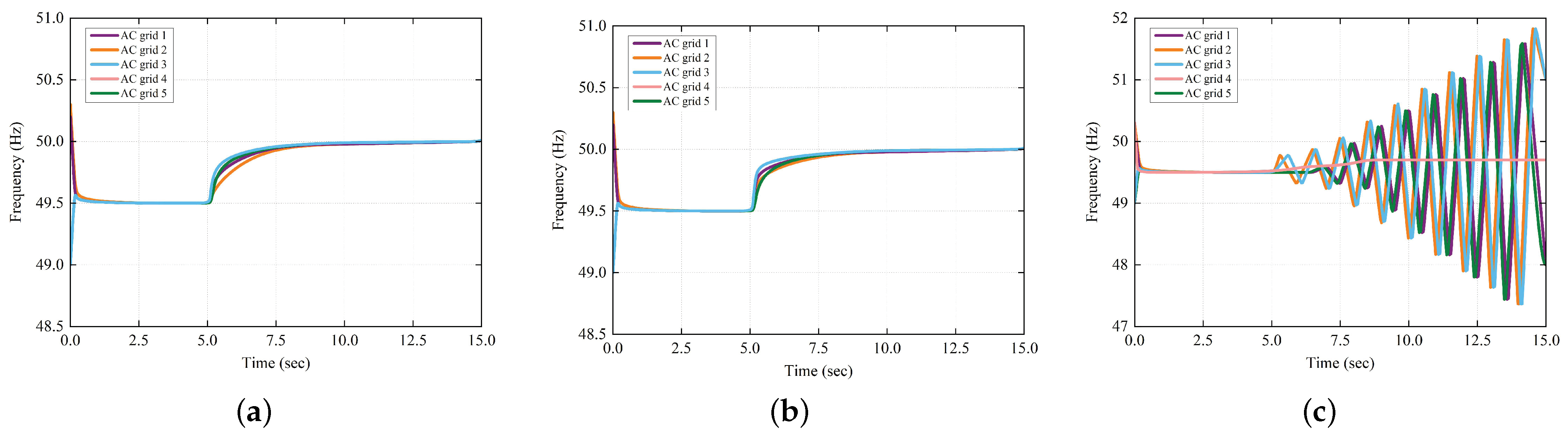
5.2. Performance under Attacks
5.3. Some Comparison Results
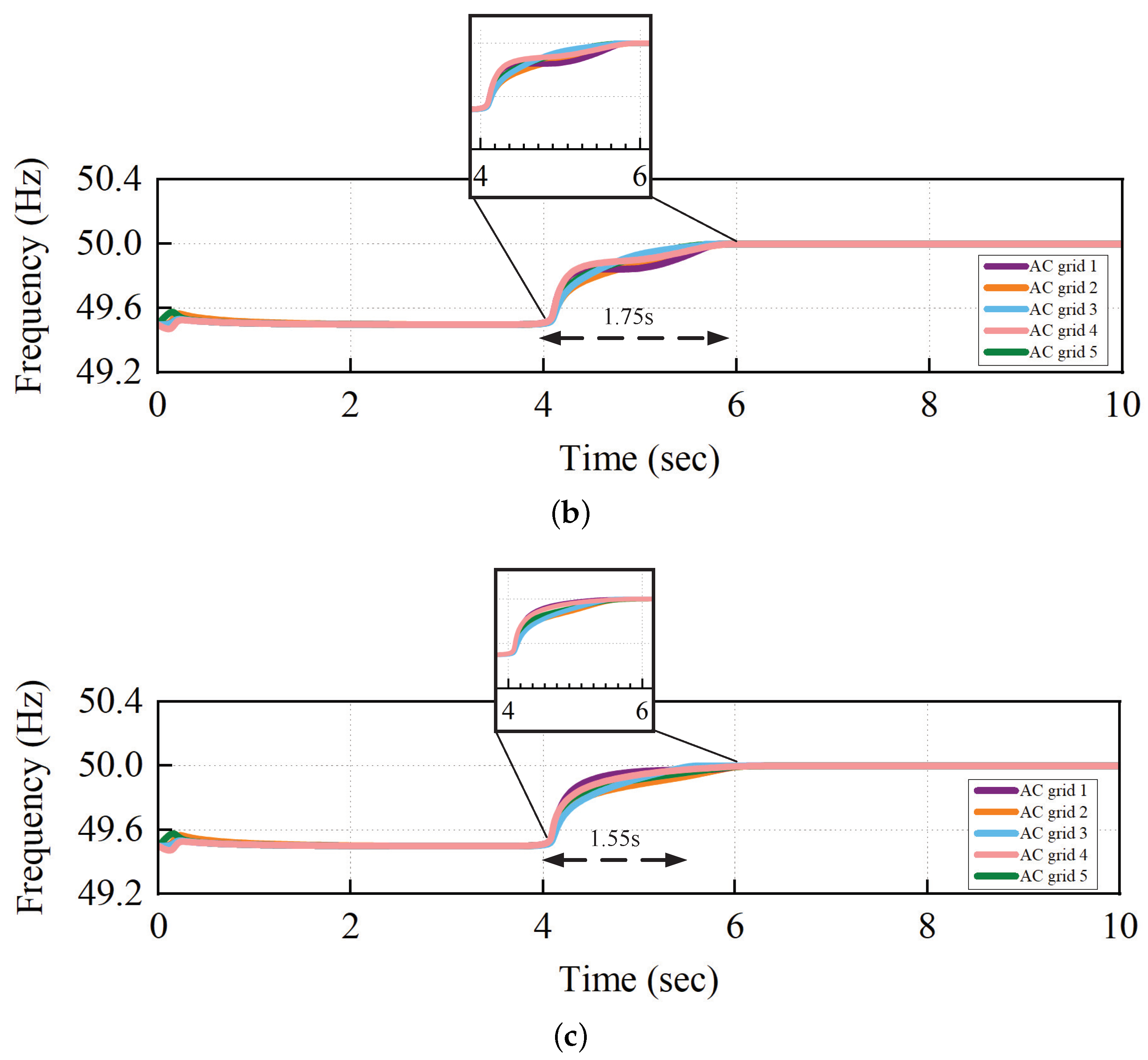
5.3.1. Convergence Performance with Different Parameters
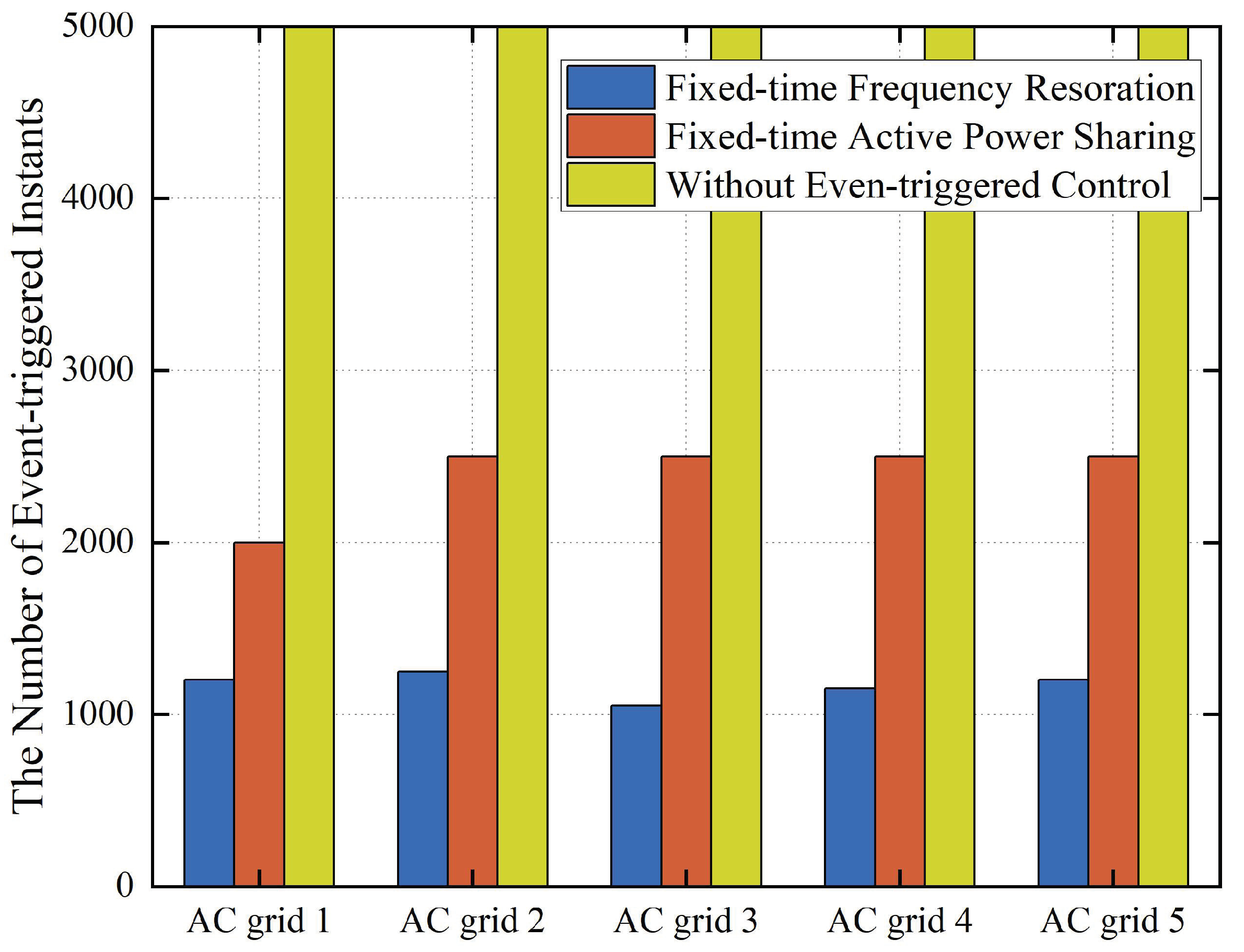
5.3.2. Quantity of Communication
5.3.3. Comparative Study with Previous Literature
6. Conclusions
Author Contributions
Funding
Data Availability Statement
Conflicts of Interest
References
- Du, W.; Fu, Q.; Wang, H. Damping torque analysis of DC voltage stability of an MTDC network for the wind power delivery. IEEE Trans. Power Deliv. 2020, 35, 324–338. [Google Scholar] [CrossRef]
- Fu, Q.; Du, W.; Wang, H.; Ma, X.; Xiao, X. DC voltage oscillation stability analysis of DC-voltage-droop-controlled multiterminal DC distribution system using reduced-order modal calculation. IEEE Trans. Smart Grid 2022, 13, 4327–4339. [Google Scholar] [CrossRef]
- Fascista, A. Toward integrated large-scale environmental monitoring using WSN/UAV/Crowdsensing: A review of applications, signal processing, and future perspectives. Sensors 2022, 22, 1824. [Google Scholar] [CrossRef] [PubMed]
- Han, H.; Li, Q.; Li, Q. Frequency support control of multi-terminal direct current system integrated offshore wind farms considering direct current side stability. Electronics 2023, 12, 3029. [Google Scholar] [CrossRef]
- Xiong, Y.; Yao, W.; Yao, Y.; Fang, J.; Ai, X.; Wen, J.; Cheng, S. Distributed cooperative control of offshore wind farms integrated via MTDC system for fast frequency support. IEEE Trans. Ind. Electron. 2023, 70, 4693–4704. [Google Scholar] [CrossRef]
- Muyeen, S.M.; Takahashi, R.; Tamura, J. Operation and control of HVDC-connected offshore wind farm. IEEE Trans. Sustain. Energy 2010, 1, 30–37. [Google Scholar] [CrossRef]
- Shadabi, H.; Kamwa, I. Dual adaptive nonlinear droop control of VSC-MTDC system for improved transient stability and provision of primary frequency support. IEEE Access 2021, 9, 76806–76815. [Google Scholar] [CrossRef]
- Gavriluta, C.; Candela, I.; Luna, A.; Gomez-Exposito, A.; Rodriguez, P. Hierarchical control of HV-MTDC systems with droop-based primary and OPF-based secondary. IEEE Trans. Smart Grid 2015, 6, 1502–1510. [Google Scholar] [CrossRef]
- Shinoda, K.; Benchaib, A.; Dai, J.; Guillaud, X. Over-and under-voltage containment reserves for droop-based primary voltage control of MTDC grids. IEEE Trans. Power Deliv. 2022, 37, 125–135. [Google Scholar] [CrossRef]
- Liu, X.; Zhang, X.; Guo, F.; Xiao, G.; Wang, P. Decentralized secondary frequency restoration and power sharing control for MTDC transmission systems. In Proceedings of the IECON 2020 The 46th Annual Conference of the IEEE Industrial Electronics Society, Singapore, 18–21 October 2020; pp. 1567–1572. [Google Scholar] [CrossRef]
- Kim, S.; Yokoyama, A.; Takaguchi, Y.; Takano, T.; Mori, K.; Izui, Y. Economic analysis on multi-terminal VSC-HVDC systems with wind farms based on hierarchical optimal power flow with stability constraint. In Proceedings of the 2019 IEEE Milan PowerTech, Milan, Italy, 23–27 June 2019; pp. 1–6. [Google Scholar] [CrossRef]
- Wen, Y.; Zhan, J.; Chung, C.Y.; Li, W. Frequency stability enhancement of integrated AC/VSC-MTDC systems with massive infeed of offshore wind generation. IEEE Trans. Power Syst. 2018, 33, 5135–5146. [Google Scholar] [CrossRef]
- Chaudhuri, N.R.; Majumder, R.; Balarko, C.; Chaudhuri, B. System frequency support through multi-terminal DC (MTDC) grids. IEEE Trans. Power Syst. 2013, 28, 347–356. [Google Scholar] [CrossRef] [Green Version]
- Song, Q.; Chen, J.; Chen, J.; Chen, G. Completely decentralized energy management system for fuel cell-battery-ultracapacitor hybrid energy storage system. IEEE Trans. Ind. Electron. 2023, 71, 438–449. [Google Scholar] [CrossRef]
- Xu, Y.; Wu, Z.-G.; Pan, Y.-J. Observer-based dynamic event-triggered adaptive control of distributed networked systems with application to ground vehicles. IEEE Trans. Ind. Electron. 2023, 70, 4148–4157. [Google Scholar] [CrossRef]
- Li, Z.; Wei, Z.; Zhan, R.; Li, Y.; Tang, Y.; Zhang, X.-P. Frequency support control method for interconnected power systems using VSC-MTDC. IEEE Trans. Power Syst. 2021, 36, 2304–2313. [Google Scholar] [CrossRef]
- Wang, W.; Yin, X.; Cao, Y.; Jiang, L.; Li, Y. A distributed cooperative control based on consensus protocol for VSC-MTDC systems. IEEE Trans. Power Syst. 2021, 36, 2877–2890. [Google Scholar] [CrossRef]
- Ni, J.; Shi, P.; Zhao, Y.; Pan, Q.; Wang, S. Fixed-time event-triggered output consensus tracking of high-order multiagent systems under directed interaction graphs. IEEE Trans. Cybern. 2022, 52, 6391–6405. [Google Scholar] [CrossRef]
- You, X.; Hua, C.; Li, K.; Jia, X. Fixed-time leader-following consensus for high-order time-varying nonlinear multiagent systems. IEEE Trans. Autom. Control 2020, 65, 5510–5516. [Google Scholar] [CrossRef]
- Yang, H.; Ye, D. Observer-based fixed-time secure tracking consensus for networked high-order multiagent systems against DoS attacks. IEEE Trans. Cybern. 2022, 52, 2018–2031. [Google Scholar] [CrossRef]
- Xiong, T.; Gu, Z. Observer-based fixed-time consensus control for nonlinear multi-agent systems subjected to measurement noises. IEEE Access 2020, 8, 174191–174199. [Google Scholar] [CrossRef]
- Mishra, J.P.; Li, C.; Jalili, M.; Yu, X. Robust second-order consensus using a fixed-time convergent sliding surface in multiagent systems. IEEE Trans. Cybern. 2020, 50, 846–855. [Google Scholar] [CrossRef]
- Wang, P.; Huang, R.; Zaery, M.; Wang, W.; Xu, D. A fully distributed fixed-time secondary controller for DC microgrids. IEEE Trans. Ind. Appl. 2020, 56, 6586–6597. [Google Scholar] [CrossRef]
- Zhao, D.; Zhang, C.; Sun, Y.; Li, S.; Sun, B.; Li, Y. Distributed robust frequency restoration and active power sharing for autonomous microgrids with event-triggered strategy. IEEE Trans. Smart Grid 2021, 12, 3819–3834. [Google Scholar] [CrossRef]
- Ni, J.; Cao, H.; Liu, X.; Yang, L.; Xiong, L. Fixed-time leader-follower consensus based secondary voltage control for microgrid under directed communication graph. In Proceedings of the 2021 IEEE International Conference on Real-time Computing and Robotics, Xining, China, 15–19 July 2021; pp. 566–571. [Google Scholar] [CrossRef]
- Sun, J.; Yang, J.; Li, S.; Zeng, Z. Predictor-based periodic event-triggered control for dual-rate networked control systems with disturbances. IEEE Trans. Cybern. 2022, 52, 8179–8190. [Google Scholar] [CrossRef]
- Yu, H.; Hao, F.; Chen, T. A uniform analysis on input-to-state stability of decentralized event-triggered control systems. IEEE Trans. Autom. Control 2019, 64, 3423–3430. [Google Scholar] [CrossRef]
- Zhang, H.; Zhang, J.; Cai, Y.; Sun, S.; Sun, J. Leader-following consensus for a class of nonlinear multiagent systems under event-triggered and edge-event triggered mechanisms. IEEE Trans. Cybern. 2022, 52, 7643–7654. [Google Scholar] [CrossRef] [PubMed]
- Zhang, N.; Sun, Q.; Yang, L.; Li, Y. Event-triggered distributed hybrid control scheme for the integrated energy system. IEEE Trans. Ind. Inform. 2022, 18, 835–846. [Google Scholar] [CrossRef]
- Lu, J.; Zhao, M.; Golestan, S.; Dragicevic, T.; Pan, X.; Guerrero, J.M. Distributed event-triggered control for reactive, unbalanced, and harmonic power sharing in islanded AC microgrids. IEEE Trans. Ind. Electron. 2022, 69, 1548–1560. [Google Scholar] [CrossRef]
- Wang, Y.; Nguyen, T.L.; Xu, Y.; Li, Z.; Tran, Q.; Caire, R. Cyber-physical design and implementation of distributed event-triggered secondary control in islanded microgrids. IEEE Trans. Ind. Appl. 2019, 55, 5631–5642. [Google Scholar] [CrossRef]
- Zuo, Z. Nonsingular fixed-time consensus tracking for second-order multi-agent networks. Automatica 2015, 54, 305–309. [Google Scholar] [CrossRef]
- Zhang, H.; Yue, D.; Yin, X.; Hu, S.; Dou, C. Finite-time distributed event-triggered consensus control for multi-agent systems. Inf. Sci. 2016, 339, 132–142. [Google Scholar] [CrossRef]
- Andreasson, M.; Wiget, R.; Dimarogonas, D.V.; Johansson, K.H.; Andersson, G. Distributed frequency control through MTDC transmission systems. IEEE Trans. Power Syst. 2017, 32, 250–260. [Google Scholar] [CrossRef] [Green Version]
- Beerten, J.; Belmans, R. Modeling and control of multi-terminal VSC-HVDC systems. Energy Procedia 2012, 24, 123–130. [Google Scholar] [CrossRef] [Green Version]
- Polyakov, A. Nonlinear feedback design for fixed-time stabilization of linear control systems. IEEE Trans. Autom. Control 2012, 57, 2106–2110. [Google Scholar] [CrossRef] [Green Version]
- Milano, F. Power System Modelling and Scripting; Springer: New York, NY, USA, 2010. [Google Scholar]
- Choi, J.; Habibi, S.I.; Bidram, A. Distributed finite-time event-triggered frequency and voltage control of AC microgrids. IEEE Trans. Power Syst. 2022, 37, 1979–1994. [Google Scholar] [CrossRef]












{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
| Refs. | System Types | Control Scheme | Transmission Form |
|---|---|---|---|
| [18] | Multi-agent system | Distributed fixed-time control | Event-triggered mechanism |
| [30] | Microgrids | Distributed secondary control | Event-triggered mechanism |
| [23] | Microgrids | Distributed fixed-time secondary control | Time-triggered mechanism |
| [25] | Microgrids | Distributed fixed-time secondary control | Event-triggered mechanism |
| [12] | MTDC transmission system | Centralized secondary control | Time-triggered mechanism |
| [13] | MTDC transmission system | Decentralized secondary control | Time-triggered mechanism |
| [17] | MTDC transmission system | Distributed secondary control | Time-triggered mechanism |
| This study | MTDC transmission system | Distributed fixed-time secondary control | Event-triggered mechanism |
| Parameter | Symbol | Value |
|---|---|---|
| AC System Frequency | f | 50 Hz |
| AC Nominal Voltage | 10 kV (L to L) | |
| AC Side Resistance | R | |
| AC Side Inductance | L | 0.705 mH |
| DC Nominal Voltage | 20 kV | |
| DC Side Capacitance | C | |
| DC Line Resistance | ||
| DC Line Inductance | 0.165 mH/km |
Disclaimer/Publisher’s Note: The statements, opinions and data contained in all publications are solely those of the individual author(s) and contributor(s) and not of MDPI and/or the editor(s). MDPI and/or the editor(s) disclaim responsibility for any injury to people or property resulting from any ideas, methods, instructions or products referred to in the content. |
© 2023 by the authors. Licensee MDPI, Basel, Switzerland. This article is an open access article distributed under the terms and conditions of the Creative Commons Attribution (CC BY) license (https://creativecommons.org/licenses/by/4.0/).
Share and Cite
Zhang, X.; Liu, X.; Wang, P. Distributed Fixed-Time Secondary Control for MTDC Systems Using Event-Triggered Communication Scheme. Processes 2023, 11, 2329. https://doi.org/10.3390/pr11082329
Zhang X, Liu X, Wang P. Distributed Fixed-Time Secondary Control for MTDC Systems Using Event-Triggered Communication Scheme. Processes. 2023; 11(8):2329. https://doi.org/10.3390/pr11082329
Chicago/Turabian StyleZhang, Xiaoyue, Xinghua Liu, and Peng Wang. 2023. "Distributed Fixed-Time Secondary Control for MTDC Systems Using Event-Triggered Communication Scheme" Processes 11, no. 8: 2329. https://doi.org/10.3390/pr11082329